Изобретение относится к геодезическим измерениям и может быть ис- попьзрвано для выполнения наземной крупномасштабной съемки, а также в других областях, связанных с опреде-- лением npocTpaHcjBeHHbtx координат объекта.
Целью изобретения является увели333QOA2
По приращениям находят плановые координаты определяемой точки
х + &х; у
УМ йу. (4)
5 Абсолютную отметку точки N вычисляют дважды по формулам
И.
ГИ,
Z - а; Н,
TH.,
чение диапазона и повышение точности ю Де ГИд - горизонт инструмента в опредаления координат.точке М,
На фиг,1 изображена геометрическая ,
Zi - S , 81п«б„
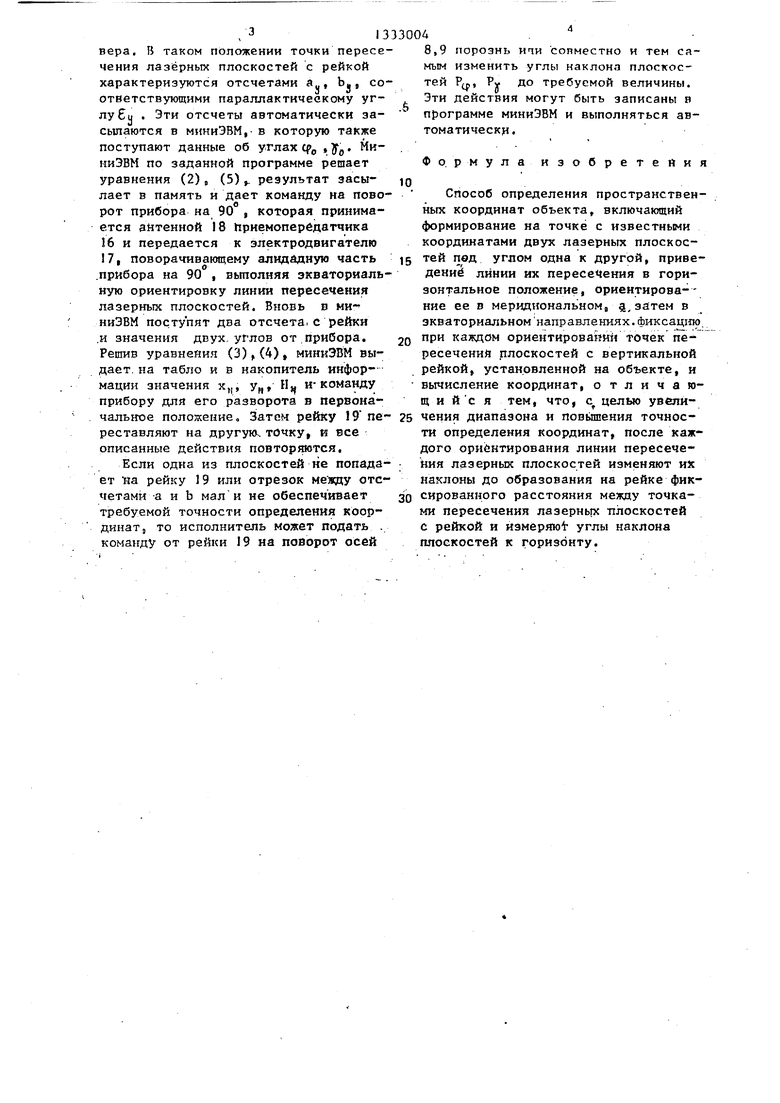
схема способа определения пространственных координат, объекта; на фиг. 2 принципиальная схема устройства для реализации способа.
.При осуществлении способа (..г .. фиг.1) создают две пересекающиеся плоскости Р и Р„,, наклоненные, к плоскости горизонта соответственно на углы УО и Ц| . При ориентировании линии их пересечения по направлению север-юг максимальный параллактичес - кий угол BQ f о плоскос)f , tgg 8ino6 - расстояния 15 от плоскости горизонта до точек пересечения соответствующих лазерных плоскостей с рейкой;
aj b - отсчеты по рейке, Устройс,тво для реализации способа 2Q содержит основание с угломерной
частью 1 , колонку 2 и зрительную тру- бу 3, На колонке 2 закрепленьг лазер-, ная .трубка 4, призмы 5,6,7 два микроэлектродвигателя (на фиг,2 не потями находится на направлении запад- 25 казаны), на осях вращения 8 и 9 ковосТок (экваториальный наклон плоскостей) а по остальньм направлениям он (5и) будет изменяться npontop-- ционально синусу дирекционного угла об направления с исходной точки М на определяемую N, т.е., На фотоприемной рейке этрму углу соответствует отрезок Пп Ъ, а.(,,.
торых конусные призмы 10,11 с датчиками 12,13 вертикального, угла, г также считывающие устройства Г 4,15, связанные кабелями с приемо-передат- зочиком 16. Микроэлектродвигатель 17 . кинематически связан с колонкой 2 и поворачивает ее вместе с апидадной частью на фиксированный угол 90 в
где bj. ay - отсчеты по рейке, соот- одну или другую сторону по команде ветствующие .экваториально наклонен- . приемопередатчика 16. Антенна 18
ным плоскостям PJ и Рф.
Горизонтальное проложение мезвду точками М и N находят по формуле
прикреплена к .колонке 2 и обеспечивает работу приемопередатчика 16.
Б. процессе работы в полевых условиях в -исходной точке М устанавли«ц
(О
bij - а2.
tgy tg4 3
которую после преобразования приводят к .виду
Пд „, )81П
Из преобразованной формулы получают значение приращения по оси ординат
J -S.«Bin. . . К,,Пу,(2)
Аналогично находят и приращение по оси абцисс, изменив предваритель- , но наклон лазерных плоскостей на меридиональныйЛх
,,
К, К
I
а
До 10
(3)
333QOA2
По приращениям находят плановые координаты определяемой точки
х + &х; у
УМ йу. (4)
5 Абсолютную отметку точки N вычисляют дважды по формулам
И.
ГИ,
Z - а; Н,
)f , tgg 8ino6 - расстояния от плоскости горизонта до точек пересечения соответствующих лазерных плоскостей с рейкой;
aj b - отсчеты по рейке, Устройс,тво для реализации способа содержит основание с угломерной
частью 1 , колонку 2 и зрительную тру- бу 3, На колонке 2 закрепленьг лазер-, ная .трубка 4, призмы 5,6,7 два микроэлектродвигателя (на фиг,2 не поторых конусные призмы 10,11 с датчиками 12,13 вертикального, угла, г также считывающие устройства Г 4,15, связанные кабелями с приемо-передат- . зочиком 16. Микроэлектродвигатель 17 . кинематически связан с колонкой 2 и поворачивает ее вместе с апидадной частью на фиксированный угол 90 в
прикреплена к .колонке 2 и обеспечивает работу приемопередатчика 16.
Б. процессе работы в полевых условиях в -исходной точке М устанавливают прибор, в определяемой точке N-фотозлектрическую рейку 19 (t. фиг.1), соединенную с миниЭВМ 20 и приемопередатчиком 21. В память мй- ниЭВМ вводят значения координат исходной-точки и высоты инструмента, который приводят в рабочее положение, и включают системы питания. Лазерный луч от трубки 4, пройдя прямоугольные призмы 5, к делительную кубпризму 6, делится на две части, попадающие на Конусные призмы 10, П.Призма 10 разворачивает одну часть луча в плоскость Pq), наклоненную к горизонту на угол tpjj р призма 1 I разво зачивает другую часть луча в плоскость Pyii наклоненную на угол jfg , С помощью угломерной части 1 и зрительной трубы 3 линию пересечения плоскостей ориентируют в направлении севера, В таком положении точки пересечения лазерных плоскостей с рейкой характеризуются отсчетами а , Ь,., соответствующими параллактическому углу 6
3
Эти отсчеты автоматически эасьтаются в миниЭВМ, в которую также поступают данные об углах ср .у,. МиниЭВМ по заданной программе решает уравнения (2), (5) результат засылает в память и дает команду на поворот прибора на 90°, которая принимается айтенной 18 Приемопередатчика 6 и передается к электродвигателю 17, поворачивающему алидйдную часть .прибора на 90 , вьшолияя экваториальную ориентировку линии пересечения лазерных плоскостей. Вновь в ми- ниЭВМ поступят два отсчета.с рейкн .и значения двух, углов от,прибора. Решив уравнения (3),(4), миниЭВМ выдает, на табло и в накопитель информации значения х„, у„, Н и-команду прибору для его разворота в первона20 при каждом ориентировакй)Г1 точек пересечения плоскостей с вертикалышй рейкой, установленной на объекте, и вьмисление координат, отличаю- щ и и с я тем, что, с целью увеличальное положение. Затем рейку 19 пе- 25 чения диапазона и повышения точнос- реставляют на другую, точку, и все ти определения координат, после кажописанные действия повторяются.
Если одна из плоскостей не попадает на рейку 19 или отрезок ме яду отсчетами а и b мал и не обеспечивает требуемой точности определения координат, то исполнитель может подать . команду от рейки 19 на поворот осей
8,9 порознь иаи сопместно и тем самым изменить углы наклона плоскостей Pq,, Р до требуемой величины. Эти действия могут быть записаны в программе миниЭВМ и выполняться автоматически.
Фо. рмулаизобретейия
Способ определения пространственных координат объекта, включающий формирование на точке с известными координатами двух лазерных плоекостей под угяом одна к другой, приведение линии их пересечения в горизонтальное положение, ориентирова-- ние ее в меридиональном, а,затем в экваториальном направлениях, фиксацию.
при каждом ориентировакй)Г1 точек пересечения плоскостей с вертикалышй рейкой, установленной на объекте, и вьмисление координат, отличаю- щ и и с я тем, что, с целью увеличения диапазона и повышения точнос- ти определения координат, после каждого ориентирования линии пересече- ; йия лазерных плоскостей изменяют их
наклоны до образования на рейке фик- 3Q снрованного расстояния между точками пересечения лазерньрс плоскостей с рейкой и измеряют углы наклона плоскостей к горизонту.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тахеометр | 1988 |
|
SU1597553A1 |
| Способ определения пространственных координат объекта | 1983 |
|
SU1155850A1 |
| СПОСОБ ГОРИЗОНТАЛЬНОЙ СОЕДИНИТЕЛЬНОЙ СЪЕМКИ ПОДЭТАЖНЫХ ГОРИЗОНТОВ | 2018 |
|
RU2677089C1 |
| СПОСОБ БЕЗОТВЕСНОЙ ГОРИЗОНТАЛЬНОЙ СОЕДИНИТЕЛЬНОЙ СЪЕМКИ ПОДЭТАЖНЫХ ГОРИЗОНТОВ С ПОМОЩЬЮ ЭЛЕКТРОННОГО ТАХЕОМЕТРА | 2020 |
|
RU2736698C1 |
| Устройство для передачи направления подземных горных выработок с горизонта на горизонт через соединительный канал | 1983 |
|
SU1138496A1 |
| СССОЮЗНАЯ 1l*Tiiai.T^i^^rei(dйЧМИОТЕК.*ТЕОДОЛИТ | 1971 |
|
SU304431A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ПОДЗЕМНЫХ ГОРНЫХ ВЫРАБОТОК | 2017 |
|
RU2662468C1 |
| Способ построения пространственной геодезической сети в виде цепочки треугольников и угломерный прибор для его осуществления | 1986 |
|
SU1613858A1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2012 |
|
RU2522784C1 |
| ТЕОДОЛИТ | 1973 |
|
SU384007A1 |
Изобретение относится к геодезическим измерениям и позволяет увеличить диапазон и повысить точность определения координат, На точке с известными координатами формируют две лазерные пересекающиеся плоскос- . ти. При ориентировании линии пересечения этих плоскостей в меридио- нальном и экваториальном направлениях фиксируют отсчеты на фотоприемной рейке 19. После каждого ориентирования, линии пересечений изменяют наклоны плоскостей для получения приращений по осям абсцисс и ординат, необходимых для вычисления плановых координат определяемой точки, 2 ИЛ. с s со 00 СлЭ О
ор О.Стенина 6489
. Составитель В.Сараханов Техред И.Попович
Тяр .680.
ВЙИШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Жг-35, Раушская наб., д.4/5
Корр Подп
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Корректор В. Вутяга Подписное
| Международная, заявка № .81/ОП95, кл, G 01 С IS/CO/ 30.04.81 | |||
| Авторское сйкдетельство СССР № | |||
| Способ определения пространственных координат объекта | 1983 |
|
SU1155850A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
