Область техники
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах отображения информации на экране растрового монитора для перемещения курсора, управления ориентацией изображений подвижных объектов на экране растрового монитора.
Уровень техники
Известен шаровой манипулятор, содержащий размещенные в корпусе и кинематически связанные между собой ведущий шар и два взаимно-перпендикулярных ведомых валика, на осях которых закреплены кодовые колеса и связанные с ними координатные преобразователи, нижний и два боковых элемента подвески ведущего шара закреплены в корпусе (Графический шаровой манипулятор, авторское свидетельство СССР №1674187, МКИ 5 G 06 K 11/06, G 06 F 3/033, автор Н.В.Воробьев, 30.08.91, Бюллетень №32).
Недостаток известного шарового манипулятора - аналога заключается в большой высоте и ширине прибора из-за нижней и боковой подвесок ведущего шара, выполненных в виде поворотных Г-образных втулок с двумя подшипниками на их концах, что приводит к увеличению габаритов всего шарового манипулятора.
Наиболее близким по технической сущности к предлагаемому изобретению (прототипом) является шаровой манипулятор, содержащий размещенные в корпусе и кинематически связанные между собой ведущий шар и два взаимно-перпендикулярных ведомых валика, на осях которых закреплены кодовые колеса и связанные с ними координатные преобразователи, нижний и один боковой элемент подвески ведущего шара закреплены в корпусе (Шаровой манипулятор, патент РФ №2006963, МКИ 5 G 09 G 5/08, авторы Е.И.Кутний, Б.Г.Майоров, О.Л.Пархоменко, 30.01.94, Бюллетень №2).
Недостаток шарового манипулятора - прототипа заключается в том, что нижний элемент подвески ведущего шара, выполненный в виде поворотной Г-образной втулки с двумя подшипниками на ее концах имеют большие габариты и, в свою очередь, увеличивают габаритный размер - высоту шарового манипулятора. Большие габариты шарового манипулятора не позволяют его устанавливать в подвижных объектах, имеющих малые объемы среды обитания, что сужает область его применения.
Сущность изобретения
Предлагаемый шаровой манипулятор позволяет уменьшить габаритные размеры и расширить область применения.
В известном шаровом манипуляторе, содержащем размещенные в корпусе и кинематически связанные между собой ведущий шар и два взаимно перпендикулярных ведомых валика, на осях которых закреплены кодовые колеса и связанные с ними координатные преобразователи, нижний и боковой элементы подвески ведущего шара.
Целью данного изобретения является уменьшение габаритных размеров без уменьшения диаметра ведущего шара, расширение области применения и повышение удобства работы. Для этого в заявляемом шаровом манипуляторе боковой и нижний элементы подвески ведущего шара выполнены в виде кольцевого подшипника качения, содержащего внешнее кольцо, в соответствующих гнездах которого находятся два ряда шариков, внутреннее кольцо кольцевого подшипника качения отсутствует, причем функцию внутреннего кольца кольцевого подшипника качения выполняет ведущий шар, расположенный внутри этого кольцевого подшипника качения, шарики выступают из гнезд внешнего кольца подшипника качения, касаются поверхности ведущего шара, причем две горизонтальные плоскости, проходящие через точки касания двух рядов шариков с поверхностью ведущего шара, пересекают ведущий шар выше его центра и ниже его центра.
Задача упрощения конструкции и уменьшения габаритных размеров шарового манипулятора решена без уменьшения диаметра ведущего шара, т.к. малый диаметр ведущего шара приводит к ухудшению удобства работы человека-оператора.
Нижний элемент подвески ведущего шара выполнен без поворотной Г-образной втулки с двумя подшипниками на ее концах, а заменен кольцевым подшипником качения с внутренним диаметром несколько большим, чем диаметр ведущего шара. Ведущий шар опирается на нижний ряд шариков кольцевого подшипника качения, таким образом, габаритный размер шарового манипулятора - высота сокращается на высоту Г-образной втулки и фактически равен диаметру ведущего шара.
При этом устраняется эффект скачка ведущего шара, который наблюдается в известном шаровом манипуляторе с поворотной Г-образной втулкой в качестве нижнего элемента подвески. Этот эффект состоит в том, что при резком изменении направления вращения ведущего шара на 180° Г-образная втулка не успевает плавно развернуться на 180°, а разворачивается скачком и ее движение повторяет курсор на экране растрового монитора. При этом оператор теряет курсор на экране монитора и теряет время на его поиск вместо осуществления процесса управления в системах реального времени.
Функцию бокового элемента подвески ведущего шара выполняет тот же кольцевой подшипник, в котором ведущий шар опирается на два ряда шариков, и не сваливается в стороны, и не вываливается вверх, т.к. верхний ряд шариков расположен в плоскости, пересекающей ведущий шар выше его центра.
При этом устраняется звук - скрежет, который возникает от бокового элемента подвески - прижимного подшипника и наблюдается в известном шаровом манипуляторе, если направление вращения ведущего шара осуществляется вокруг вертикальной его оси, т.е. совпадает с направляющей линией (цилиндра) внешнего кольца прижимного подшипника.
Предлагаемое решение позволяет ведущему шару вращаться в любом направлении без указанных нежелательных эффектов и при этом уменьшаются габариты шарового манипулятора без уменьшения диаметра ведущего шара.
Перечень чертежей
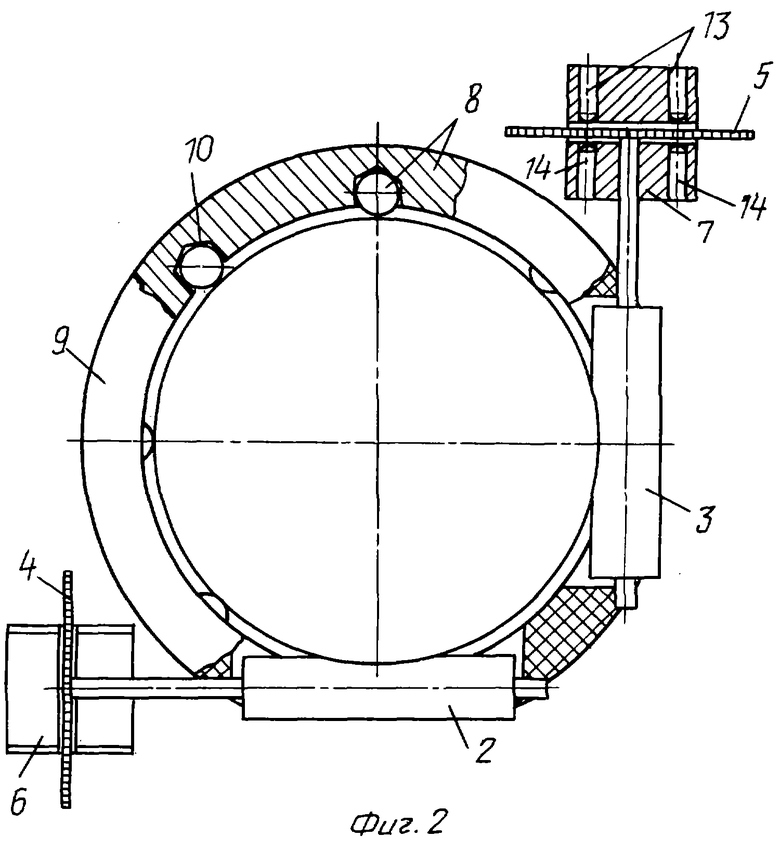
На фиг.1 изображен вид спереди механизма шарового манипулятора.
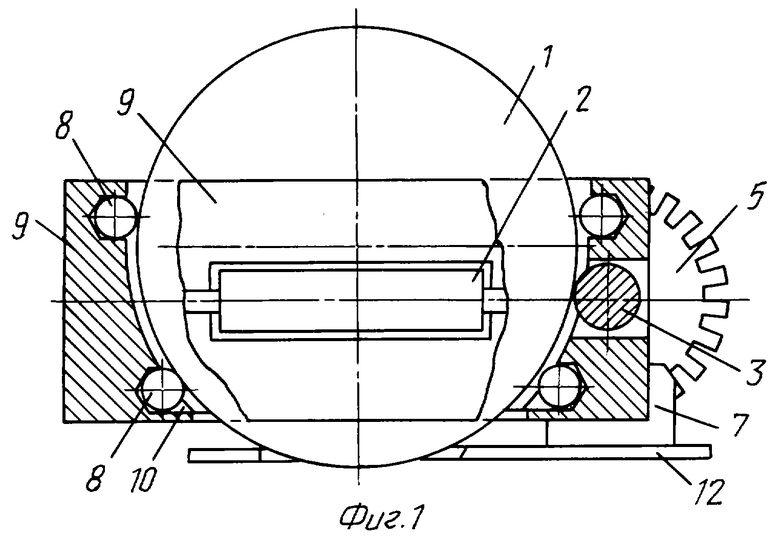
На фиг.2 изображен вид сверху механизма шарового манипулятора.
Пример варианта выполнения изобретения
Шаровой манипулятор содержит размещенные в корпусе (не показан) и связанные между собой кинематически, ведущий шар 1 и два взаимно-перпендикулярных ведомых валика 2, 3. На осях ведомых валиков 2, 3 закреплены кодовые колеса 4, 5, часть поверхности которых находится внутри пазов координатных преобразователей 6, 7 (на фигуре 1 не изображено кодовое колесо 4 и координатный преобразователь 6 для удобства показа состава подшипника качения 8). Нижний и боковой элементы подвески ведущего шара 1 выполнены в виде подшипника качения 8. Внешнее кольцо 9 подшипника качения 8 имеет два ряда гнезд 10, в которых расположены шарики 11, которые касаются поверхности ведущего шара 1. Точки касания верхнего ряда шариков 11 с поверхностью ведущего шара 1 находятся в горизонтальной плоскости, расположенной выше центра ведущего шара 1. Точки касания нижнего ряда шариков 11 с поверхностью ведущего шара 1 находятся в горизонтальной плоскости, расположенной ниже центра ведущего шара 1. Координатные преобразователи 6, 7 установлены на печатной плате 12. В каждом координатном преобразователе 6 и 7 установлены две соосные пары светодиод 13 и фотодиод 14.
Шаровой манипулятор работает следующим образом. Человек - оператор вращает ведущий шар 1, который постоянно находится в зацеплении (кинематически связан) с двумя взаимно-перпендикулярными ведомыми валиками 2, 3. Плавность вращения ведущего шара 1 в любом направлении обеспечивает его нахождение между шариками 11, которые плавно вращаются в гнездах 10 внешнего кольца 9 подшипника качения 8. При вращении ведущего шара 1 ведомые валики 2 и 3 раскладывают вектор скорости вращения ведущего шара 1 на два взаимно-перпендикулярных вектора скорости вращения самих ведомых валиков 2 и 3. Таким образом, если вращение ведущего шара 1 происходит строго в глубину (из глубины) шарового манипулятора, то ведущий шар 1 вращает только ведомый валик 2 - векторы скорости ведущего шара 1 и ведомого валика 2 совпадают. Ведомый валик 3 при этом не вращается, т.к. вектор скорости ведущего шара 1 параллелен оси ведомого валика 3. Аналогичное (и обратное указанному выше) взаимодействие происходит между ведущим шаром 1 и ведомыми валиками 3 и 2 при направлениях его вращения по ширине шарового манипулятора. При этом ведомый валик 3 вращается, ведомый валик 2 не вращается. При направлениях вращения ведущего шара 1, отличных от указанных выше, его вектор скорости раскладывается на два вектора ведомых валиков 2 и 3. На осях ведомых валиков 2 и 3 закреплены кодовые колеса 4 и 5, которые при вращении соответствующего валика вращаются в пазах координатных преобразователей 6, 7. Каждое кодовое колесо 4 и 5 выполнено в виде круговой пластины, по краям которой нанесены радиальные вырезы - зубья. Зубья закрывают поочередно световой поток между соосными парами светодиод 13 и фотодиод 14 в каждом координатном преобразователе 6, 7, которые установлены на печатной плате 12. Импульсные сигналы с фотодиодов 14 имеют длительность и фазу, зависящие от скорости и направления вращения ведущего шара 1.
Плавность вращения ведущего шара 1 в любом направлении обеспечивает его нахождение между шариками 11, которые плавно вращаются в гнездах 10 внешнего кольца 9 подшипника качения 8 и расположены равномерно вдоль его периметра.
Кинематика ведущего шара 1 становится симметричной для всех направлений, т.е. плавность и скорость вращения ведущего шара 1 не зависят от направления вращения. Тем самым устраняются нежелательные эффекты скачка ведущего шара 1 и скрежета прижимного подшипника.
Высота предлагаемого шарового манипулятора по сравнению с известным сокращается на высоту поворотной Г-образной втулки с двумя подшипниками качения на ее концах. При использовании в этой втулке подшипника качения с внешним диаметром, равным 8 мм, ее высота составит около 20 мм, что существенно для высоты предлагаемого шарового манипулятора, равной диаметру ведущего шара 1 (например - 60 мм).
Промышленная применимость
Предложенный шаровой манипулятор промышленно реализуем, позволяет уменьшить габаритные размеры без уменьшения диаметра ведущего шара 1, улучшить его технические характеристики, расширить область применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАРОВОЙ МАНИПУЛЯТОР | 2004 |
|
RU2257607C1 |
| МАНИПУЛЯТОР ШАРОВОЙ | 2010 |
|
RU2446440C1 |
| ШАРОВОЙ МАНИПУЛЯТОР | 2014 |
|
RU2563610C1 |
| Графический шаровой манипулятор | 1989 |
|
SU1674187A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ КУРСОРОМ | 2004 |
|
RU2290683C2 |
| РЕДУКТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 1995 |
|
RU2123627C1 |
| Веломобиль с пневмоаккумуляторным приводом | 1988 |
|
SU1717471A1 |
| УГЛОВАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 2004 |
|
RU2281862C2 |
| ВЕДУЩИЙ МОСТ С ПОДВЕСКОЙ И СЕЛЬСКОХОЗЯЙСТВЕННЫЙ ТРАКТОР С УКАЗАННЫМ МОСТОМ | 2002 |
|
RU2277050C2 |
| Кулачковый генератор волновой передачи | 1975 |
|
SU658344A1 |
Шаровой манипулятор относится к автоматике и вычислительной технике и может быть использован в системах отображения информации для перемещения курсора на экране растрового монитора. Техническим результатом является уменьшение габаритных размеров без уменьшения размера ведущего шара, расширение области применения, повышение удобства работы. Указанный результат достигается за счет того, что боковой и нижний элементы подвески ведущего шара выполнены в виде кольцевого подшипника качения, содержащего внешнее кольцо, в соответствующих гнездах которого находятся два ряда шариков, внутреннее кольцо кольцевого подшипника качения отсутствует, при чем функцию внутреннего кольца кольцевого подшипника качения выполняет ведущий шар. 2 ил.
Шаровой манипулятор, содержащий размещенные в корпусе и кинематически связанные между собой ведущий шар и два взаимно перпендикулярных ведомых валика, на осях которых закреплены кодовые колеса и связанные с ними координатные преобразователи, нижний и боковой элементы подвески ведущего шара, отличающийся тем, что боковой и нижний элементы подвески ведущего шара выполнены в виде кольцевого подшипника качения, содержащего внешнее кольцо, в соответствующих гнездах которого находятся два ряда шариков, внутреннее кольцо кольцевого подшипника качения отсутствует, причем функцию внутреннего кольца кольцевого подшипника качения выполняет ведущий шар, расположенный внутри этого кольцевого подшипника качения, шарики выступают из гнезд внешнего кольца подшипника качения, касаются поверхности ведущего шара, причем две горизонтальные плоскости, проходящие через точки касания двух рядов шариков с поверхностью ведущего шара, пересекают ведущий шар выше его центра и ниже его центра.
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ КУРСОРА ПО ЭКРАНУ ЦВЕТНОГО РАСТРОВОГО ИНДИКАТОРА | 1992 |
|
RU2006963C1 |
| Графический шаровой манипулятор | 1989 |
|
SU1674187A1 |
| JP 61262833 A, 20.11.1986 | |||
| EP 1176499 A, 30.01.2002 | |||
| УСТРОЙСТВО, ОБЛАДАЮЩЕЕ СВОЙСТВАМИ СВЕТОВОЗВРАЩЕНИЯ И ИЗЛУЧЕНИЯ ОТВЕТНОГО РАДИОСИГНАЛА | 2002 |
|
RU2332712C2 |
| ЗОНДЫ ВИЗУАЛИЗАЦИИ БЕЛКА ГЕНТИНГТИНА | 2016 |
|
RU2721419C2 |

