Область техники
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах отображения информации на экране растрового монитора для перемещения курсора, управления ориентацией изображений подвижных объектов на экране растрового монитора.
Уровень техники
Известен шаровой манипулятор, содержащий размещенные в корпусе и кинематически связанные между собой ведущий шар и два взаимно перпендикулярных ведомых валика, на осях которых установлены кодовые колеса и связанные с ними координатные преобразователи, нижний и два боковых элемента подвески ведущего шара закреплены в корпусе (Графический шаровой манипулятор, авторское свидетельство СССР №1674187, МКИ5 G 06 K 11/06, G 06 F 3/033, автор Н.В.Воробьев, 30.08.91., Бюллетень №32).
Недостаток известного шарового манипулятора - аналога заключается в большой высоте и ширине прибора из-за нижней и боковой подвесок ведущего шара, выполненных в виде поворотных Г-образных осей с двумя подшипниками на их концах, что приводит к увеличению габаритов всего шарового манипулятора.
Наиболее близким по технической сущности к заявляемому предлагаемому изобретению (прототипом) является шаровой манипулятор, содержащий размещенные в корпусе и кинематически связанные между собой ведущий шар и два взаимно перпендикулярных ведомых валика, на осях которых установлены кодовые колеса и связанные с ними координатные преобразователи, нижний и один боковой элемент подвески ведущего шара закреплены в корпусе (Шаровой манипулятор, патент РФ №2006963, МКИ5 G 09 G 5/08, авторы Е.И.Кутний, Б.Г.Майоров, О.Л.Пархоменко, 30.01.94., Бюллетень №2).
Недостаток шарового манипулятора - прототипа заключается в том, что нижний элемент подвески ведущего шара, выполненный в виде поворотной Г-образной оси с двумя подшипниками на ее концах, имеет большие габариты и в свою очередь увеличивают габаритный размер - высоту шарового манипулятора. Большие габариты шарового манипулятора не позволяют его устанавливать в подвижных объектах, имеющих малые объемы среды обитания, что сужает область его применения.
Сущность изобретения
Предлагаемый шаровой манипулятор позволяет уменьшить габаритные размеры и расширить область применения.
В известном шаровом манипуляторе размещенные в корпусе и связанные кинематически между собой ведущий шар и два взаимно перпендикулярных ведомых валика, на осях которых установлены кодовые колеса и связанные с ними координатные преобразователи, нижний и боковой элементы подвески ведущего шара закреплены в корпусе, нижний элемент подвески ведущего шара выполнен в виде радиально-упорного подшипника, ось вращения которого расположена вертикально и проходит через центр ведущего шара, ось радиального подшипника, на которой закреплен радиальный подшипник, расположена горизонтально, причем, оси этих подшипников перпендикулярны и не пересекаются, внешнее кольцо радиально-упорного подшипника закреплено во втулке.
Целью данного изобретения является уменьшение габаритных размеров без уменьшения диаметра ведущего шара, расширение области применения и повышение удобства работы. Для этого высота втулки и высота оси радиально-упорного подшипника выполнены меньше высоты внешнего кольца радиально-упорного подшипника, втулка и ось радиально-упорного подшипника имеют радиальные вырезы, часть поверхности радиального подшипника выступает над боковой поверхностью радиально-упорного подшипника и взаимодействует с поверхностью ведущего шара.
Кроме этого, шаровой манипулятор может быть реализован в варианте 1 так, что радиальный подшипник имеет диаметр меньший, чем радиус внутреннего кольца радиально-упорного подшипника, в радиальном вырезе оси радиально-упорного подшипника закреплена ось радиального подшипника, втулка радиально-упорного подшипника закреплена в корпусе шарового манипулятора.
Кроме этого, шаровой манипулятор может быть реализован в варианте 2 так, что радиальный подшипник имеет диаметр меньший или равный диаметру радиально-упорного подшипника, в радиальном вырезе втулки радиально-упорного подшипника закреплена ось радиального подшипника, ось радиально-упорного подшипника закреплена в корпусе шарового манипулятора.
Задача упрощения конструкции и уменьшения габаритных размеров шарового манипулятора решена без уменьшения диаметра ведущего шара, т.к. малый диаметр ведущего шара приводит к ухудшению удобства работы человека-оператора.
Нижний элемент подвески ведущего шара выполнен без поворотной Г-образной оси с двумя подшипниками на ее концах, а заменен или двумя подшипниками, вращающимися в неподвижной втулке, или двумя подшипниками, вращающимися на неподвижной оси. При этом и ось и втулка имеют высоту меньше высоты радиально-упорного подшипника качения. Ведущий шар опирается на поверхность радиального подшипника, который немного выступает над высотой радиально-упорного подшипника. Точка касания ведущего шара и поверхности внешнего кольца радиального подшипника расположена выше самой нижней точки поверхности ведущего шара. Таким образом, габаритный размер шарового манипулятора - высота - сокращается на высоту Г- образной оси и фактически равен диаметру ведущего шара плюс высота радиально-упорного подшипника.
Перечень чертежей
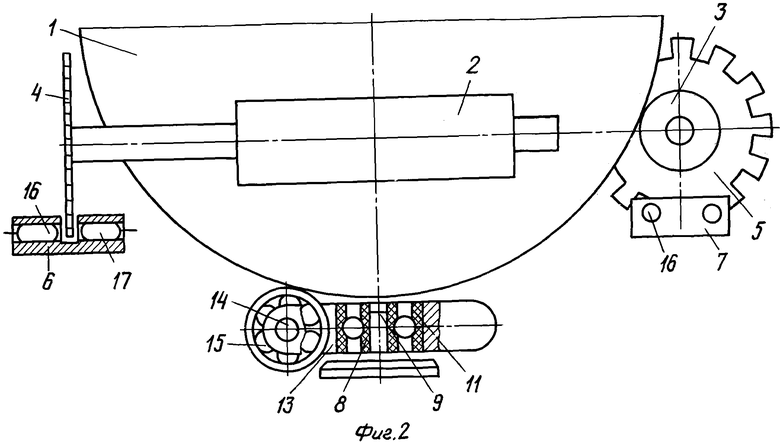
На фиг.1 изображен механизм шарового манипулятора (вариант 1).
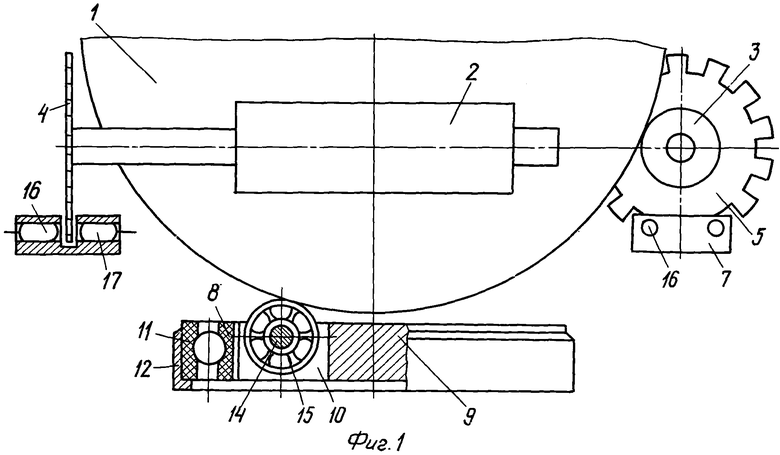
На фиг.2 изображен механизм шарового манипулятора (вариант 2).
Пример варианта выполнения изобретения
Шаровой манипулятор содержит размещенные в корпусе (на чертежах не показан) и связанные кинематически между собой ведущий шар 1 и два взаимно-перпендикулярных ведомых валика 2, 3. На осях ведомых валиков 2, 3 установлены кодовые колеса 4, 5, зубчатая часть поверхности которых находится внутри пазов координатных преобразователей 6, 7. Боковой элемент подвески ведущего шара 1 выполнен в виде подшипника качения (на чертежах не показан), прижимает ведущий шар 1 к ведомым валикам 2 и 3. В радиально-упорном подшипнике 8 закреплена ось 9, в которой проделан радиальный вырез 10. В радиальном вырезе 10 закреплена горизонтально ось 14. На оси 14 закреплен радиальный подшипник 15. Верхняя часть радиального подшипника 15 выступает над верхней поверхностью оси 9 и соприкасается с поверхностью ведущего шара 1. Внешнее кольцо 11 радиально-упорного подшипника 8 закреплено внутри втулки 12, которая закреплена в корпусе шарового манипулятора (вариант 1).
Внешнее кольцо 11 радиально-упорного подшипника 8 закреплено во втулке 12, в которой проделан радиальный вырез 13. В радиальном вырезе 13 закреплена горизонтально ось 14. На оси 14 закреплен радиальный подшипник 15. Верхняя часть радиального подшипника 15 выступает над верхней поверхностью втулки 12 и соприкасается с поверхность ведущего шара 1. Внутреннее кольцо радиально- упорного подшипника 8 закреплено на оси 9, которая закреплена в корпусе шарового манипулятора (вариант 2).
Координатные преобразователи 6 и 7 установлены на печатной плате (на чертежах плата не показана). В каждом координатном преобразователе 6 и 7 установлены две соосные пары светодиод 16 и фотодиод 17.
Шаровой манипулятор работает следующим образом. Человек-оператор вращает ведущий шар 1, который постоянно находится в зацеплении (кинематически связан) с двумя взаимно-перпендикулярными ведомыми валиками 2 и 3. Плавность вращения ведущего шара 1 в любом направлении обеспечивает его нахождение между радиальным подшипником 15 (снизу), ведомыми валиками 2 и 3 (с боков), к которым ведущий шар 1 прижимается боковым элементом подвески. При вращении ведущего шара 1 ведомые валики 2 и 3 раскладывают вектор скорости вращения ведущего шара 1 на два взаимно перпендикулярных вектора скорости вращения самих ведомых валиков 2 и 3. Таким образом, если вращение ведущего шара 1 происходит строго в глубину (из глубины) шарового манипулятора, то ведущий шар 1 вращает только ведомый валик 2 - вектора скорости ведущего шара 1 и ведомого валика 2 совпадают. Ведомый валик 3 при этом не вращается, т.к. вектор скорости ведущего шара 1 параллелен оси ведомого валика 3. Аналогичное (и обратное, указанному выше) взаимодействие происходит между ведущим шаром 1 и ведомыми валиками 3 и 2 при направлениях его вращения по ширине шарового манипулятора. При этом ведомый валик 3 вращается, ведомый валик 2 не вращается. При направлениях вращения ведущего шара 1, отличных от указанных выше, его вектор скорости раскладывается на два вектора ведомых валиков 2 и 3. На осях ведомых валиков 2 и 3 установлены кодовые колеса 4 и 5, которые при вращении соответствующего валика вращаются в пазах координатных преобразователей 6 и 7. Каждое кодовое колесо 4 и 5 выполнено в виде круговой пластины, по краям которой нанесены радиальные вырезы - зубья. Зубья закрывают поочередно световой поток между соосными парами светодиод 16 и фотодиод 17 в каждом координатном преобразователе 6 и 7, которые установлены на печатной плате. Импульсные сигналы с фотодиодов 17 имеют длительность и фазу, зависящие от скорости и направления вращения ведущего шара 1.
Плавность вращения ведущего шара 1 в любом направлении обеспечивает его соприкосновение и упор на поверхность радиального подшипника 15. Допустим, что в момент начала вращения ведущего шара 1 радиальный подшипник 15 находится в положении, когда его вертикальная плоскость симметрии не совпадает с плоскостью направления вращения ведущего шара 1. За счет совместного сцепления поверхностей (силы трения) внешнего кольца радиального подшипника 15 и ведущего шара 1 ось 9 (фиг.1) или втулка 12 (фиг.2) повернутся с радиально-упорным подшипником 8 таким образом, что плоскость симметрии совпадет с плоскостью направления вращения.
Высота предлагаемого шарового манипулятора по сравнению с известным сокращается на высоту поворотной Г-образной оси с двумя подшипниками качения на ее концах. При использовании в этой втулке подшипника качения с внешним диаметром равным 8 мм ее высота составит около 20 мм, что существенно для высоты предлагаемого шарового манипулятора, соизмеримой с диаметром ведущего шара 1 (например 60 мм).
Промышленная применимость
Предложенный шаровой манипулятор промышленно реализуем, позволяет уменьшить габаритные размеры без уменьшения диаметра ведущего шара 1, улучшить его технические характеристики, расширить область применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАРОВОЙ МАНИПУЛЯТОР | 2003 |
|
RU2248604C1 |
| ШАРОВОЙ МАНИПУЛЯТОР | 2014 |
|
RU2563610C1 |
| МАНИПУЛЯТОР ШАРОВОЙ | 2010 |
|
RU2446440C1 |
| Графический шаровой манипулятор | 1989 |
|
SU1674187A1 |
| РЕДУКТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 1995 |
|
RU2123627C1 |
| КОЛЕСНАЯ БРОНЕМАШИНА | 2005 |
|
RU2314478C2 |
| УСТРОЙСТВО ДЛЯ ВСКРЫТИЯ ПЛАСТА | 1997 |
|
RU2145663C1 |
| ТУРБОБУР-РЕДУКТОР | 2002 |
|
RU2198994C1 |
| Кантователь для сборки под сварку | 1980 |
|
SU910388A1 |
| Передаточный механизм валковой дробилки | 1989 |
|
SU1688907A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах отображения информации для перемещения курсора на экране растрового монитора. Технический результат заключается в уменьшении габаритных размеров без уменьшения диаметра ведущего шара, повышении удобства работы. Сущность изобретения состоит в том, что нижний элемент подвески ведущего шара выполнен в виде плоской связки двух подшипников качения, оси вращения которых перпендикулярны и не пересекаются, причем подшипник качения, ось которого вертикальна вращается или внутри втулки, закрепленной в корпусе шарового манипулятора, или на оси, закрепленной в корпусе шарового манипулятора. Плавность и скорость вращения ведущего шара не зависят от направления его вращения, и существенно уменьшается высота шарового манипулятора без уменьшения диаметра ведущего шара. 2 з.п. ф-лы, 2 ил.
| Графический шаровой манипулятор | 1989 |
|
SU1674187A1 |
| RU 98107126 А, 10.02.2000 | |||
| JP 2003084911, 20.03.2003 | |||
| Способ сварки вибротрением | 1960 |
|
SU141053A1 |
| WO 03088025, 23.10.2003 | |||
| ЕР 0489469, 10.06.1992. | |||

