Изобретение относится к области акустики, к нелинейной гидроакустики, в частности, и может быть использовано на скоростных пассажирских судах (СПС), а также на судах с большой осадкой в интересах предупреждения их столкновений с морскими млекопитающими (ММ).
Задача, которая решается изобретением, заключается в дальнем обнаружении, идентификации, оценке пространственных координат ММ по информации, содержащейся в гидроакустических высокочастотных (ВЧ) волнах накачки, излучаемых в носовых секторах СПС в приповерхностных воздушном и водном слоях, рассеянных на неоднородностях водно-воздушной и водной сред, а также в акустических и гидроакустических низкочастотных (НЧ) волнах, формируемых в процессе жизнедеятельности ММ, и отпугивание ММ от СПС, относительно простым способом для обеспечения безопасности мореплавания СПС и сохранения жизни ММ.
Известен способ обнаружения морских объектов, ММ в частности, по их первичному гидроакустическому полю, заключающийся в приеме шумов и сигналов в звуковом (ЗД) и ультразвуковом (УЗД) диапазонах частот, их усилении, спектральном анализе с целью выделения наиболее информативных классификационных признаков, сравнении их с эталонным сигналом и принятии решения об обнаружении ММ [1, с.342].
К недостаткам данного способа относится следующее.
1. Незначительная (единицы км) дальность действия из-за использования ЗД и УЗД частот.
2. Влияние зон «акустической тени», обусловленных особенностями распространения гидроакустических волн ЗД и УЗД частот в неоднородной (содержащей звукорассеивающие слои, а также слои с большим градиентом температуры и др.) морской среде.
3. Низкая достоверность идентификации обнаруженных ММ из-за невозможности использования низкого звукового (НЗД) и инфразвукового (ИЗД) диапазонов частот, в которых сосредоточена основная энергия сигналов и шумов ММ, а также регистрируется наибольшее количество дискретных составляющих (ДС) в их спектрах.
4. Невозможность применения на повышенных (более 10-12 узл.) скоростях хода носителя из-за высокого уровня собственных помех.
5. Невозможность применения в условиях СПС из-за подъема судна (например, на подводных крыльях и т.д.) из водной среды в приповерхностный воздушный слой и др.
Известен способ обнаружения морских объектов, в частности ММ, по их вторичному гидроакустическому полю, заключающийся в формировании и излучении в направлении объекта поиска импульсного сигнала ЗД и УЗД частот, лоцировании объекта поиска, приеме отраженного сигнала (эхо-сигнала), сравнении его с эталонным сигналом и принятие решения об обнаружении ММ [1, с.91].
К недостаткам данного способа относится следующее.
1. Малая дальность действия, обусловленная использованием ЗД и УЗД частот.
2. Влияние зон «акустической тени», обусловленных особенностями распространения гидроакустических волн ЗД и УЗД частот в неоднородной морской среде.
3. Наличие «мертвых» зон, обусловленных реверберацией (послезвучанием) излученного сигнала.
4. Зависимость эффективности способа от ракруса (взаимного угла) облучения МО.
5. Низкая достоверность идентификации обнаруженных МО из-за использовании информации, только содержащейся в эхо-сигнале.
6. Невозможность применения на повышенных (более 10-12 узл.) скоростях хода носителя из-за высокого уровня собственных помех.
7. Невозможность применения в условиях СПС из-за подъема судна (например, на подводных крыльях и т.д.) из водной среды в приповерхностный воздушный слой и др.
Известен способ обнаружения источника НЧ гидроакустических излучений, заключающийся в формировании, усилении и излучении шумового ВЧ-сигнала накачки, приеме сигналов комбинационных частот, нахождении функции корреляции между принятым сигналом накачки и задержанным случайным шумовым сигналом, формировании эквивалентной приемной антенной решетки, выделении НЧ полезного сигнала из ВЧ комбинационных частот, его спектральном анализе и сравнении с эталонным сигналом [2].
К недостаткам данного способа относится следующее.
1. Ограниченная дальность действия из-за не использования ИЗД.
2. Ограниченная дальность действия из-за низкой помехоустойчивости.
3. Низкая достоверность идентификации обнаруженных объектов из-за невозможности использования диапазона частот ниже 35 Гц.
4. Невозможность применения в условиях неспециализированного судна из-за больших (десятки-сотни м) размеров антенн др.
5. Невозможность применения на повышенных (более 10-12 узл.) скоростях хода носителя из-за высокого уровня собственных помех.
6. Невозможность применения в условиях СПС из-за подъема судна (например, на подводных крыльях и т.д.) из водной среды в приповерхностный воздушный слой и др.
Наиболее близким по технической сущности к заявляемому относится способ, выбранный в качестве способа-прототипа, дальнего обнаружения MM, заключающийся в том, что с помощью n гидроакустических излучателей, расположенных на одинаковом угловом расстоянии на корпусе носителя и ориентированных вниз и в обе стороны от носителя, излучается ВЧ-сигнал накачки на n частотах водную среду, при этом базовая частота ВЧ-сигнала накачки соответствует резонансной частоте приповерхностного пузырькового слоя (ППС), рассеянный в ППС и промодулированный по амплитуде НЧ полезным сигналом, ВЧ-сигнал накачки принимается с помощью n приемников, расположенных на одинаковом угловом расстоянии на корпусе носителя и ориентированных вниз и в обе стороны от носителя, из принятого ВЧ-сигнала накачки выделяется НЧ полезный сигнал методом детектирования, при этом направленность по приему формируется за счет волновых размеров каждого из n приемников и соответствующей ему частоте ВЧ-сигнала накачки, а определение направления на источник НЧ гидроакустических излучений - ММ осуществляется по максимальному значению полезного НЧ-сигнала путем последовательного подключения к решающему устройству каждого из n приемников [3].
К недостаткам способа-прототипа относится следующее.
1. Ограниченная дальность из-за низкой помехоустойчивости способа.
2. Низкая достоверность классификации обнаруженных ММ.
3. Невозможность применения на повышенных (более 10-12 узл.) скоростях хода носителя (надводного и подводного) из-за высокого уровня собственных помех и др.
4. Невозможность применения в условиях СПС из-за подъема судна (например, на подводных крыльях и т.д.) из водной среды в приповерхностный воздушный слой.
5. Невозможность заблаговременного отпугивания ММ от СПС и др.
Задача, которая решается изобретением, заключается в разработке способа, свободного от перечисленных выше недостатков.
Технический результат предложенного способа заключается в дальнем обнаружении, классификации и определении пространственных координат ММ (китов и др.) на повышенных (более 10-12 узл., или 18-20 км/ч) скоростях хода носителя (надводного и подводного) и в условиях движения СПС на подводных крыльях (воздушной подушке), а также заблаговременного гидроакустического вытеснения и отпугивания ММ от СПС.
Поставленная цель достигается тем, что в известном способе, заключающемся в формировании, усилении и излучении ВЧ-сигнала накачки в водную среду на n частотах ωi с помощью n гидроакустических излучателей, расположенных на корпусе носителя, при этом базовая частота ВЧ-сигнала накачки ω соответствует резонансной частоте ω0 рассеивателей звука, доминирующих в области взаимодействия волн, рассеянный и промодулированный по амплитуде НЧ полезным сигналом Ω ВЧ-сигнал накачки принимается с помощью n приемников, расположенных на корпусе носителя, при этом направленность по приему формируется за счет волновых размеров каждого из n приемников и соответствующей ему частоте ВЧ-сигнала накачки, из принятого ВЧ-сигнала накачки выделяется НЧ полезный сигнал методом детектирования, а определение направления на его источник осуществляется по максимальному значению НЧ полезного сигнала путем последовательного подключения к решающему устройству каждого из n приемников, в качестве носителя используется СПС, n приемники образуют круговой сектор наблюдения и ориентированы, в основном, для приема акустических лучей, не выходящих на поверхность моря, в качестве n частот используется базовая частота ω, соответствующая резонансной частоте ω0гпс рассеивателей звука доминирующих в ГПС и ее высшие гармоники 2ω, 3ω и т.д., дополнительно в диапазоне максимальной акустической чувствительности китов формируется, усиливается и излучается ВЧ-сигнал ω* в приповерхностные воздушный и водный слои с помощью m акустических брызгозащитных излучателей, расположенных на корпусе СПС над водой, прямой ВЧ-сигнал воздействует на биологический гидролокатор кита и частично изменяет его поведенческие характеристики - кит изменяет направление своего движения, а рассеянный на неоднородностях приповерхностных воздушного и водного слоев ВЧ-сигнал принимается с помощью m акустических брызгозащитных приемников, расположенных на корпусе СПС над водой, а также с помощью n гидроакустических приемников, дополнительно рассеянные ВЧ-сигналы ω и ω* модулируется по фазе НЧ полезным сигналом Ω, который затем выделяется из ВЧ-сигналов ω и ω* методом фазового детектирования, дополнительно n гидроакустические и m акустические приемники к решающему устройству подключаются одновременно или параллельно друг другу и осуществляется многоканальная пространственная обработка ВЧ-сигналов ω и ω* с последующим суммированием НЧ полезного сигнала по каждой из n и m ХН, дополнительно осуществляется многоканальная частотная обработка ВЧ ω и ω* с последующим суммированием НЧ полезного сигнала в каждой из n и m ХН, дополнительно формируются, усиливаются и излучаются сигналы Ωхщ хищника - косатки в момент атаки на жертву - кита, прямой сигнал хищника воздействует на всю нервную систему кита и полностью изменяет его поведенческие характеристики - кит разворачивается и уходит в обратном направлении от СПС, при этом излучение сигналов хищника осуществляется в течение определенных интервалов времени при помощи n и m излучателей.
I. Увеличение дальности обнаружения и определения пространственных координат китов достигается за счет следующего.
1. Многоканальной пространственной обработки модуляционного процесса и последующего суммирования НЧ полезного сигнала по каждой из ХН.
2. Многоканальной частотной обработки модуляционного процесса и последующего суммирования НЧ полезного сигнала в данной ХН.
3. Повышением акустической чувствительности способа путем увеличения эффективности преобразования акустической энергии ВЧ-волн накачки в акустическую энергию ВЧ-волн комбинационных частот.
4. Рассеянные ВЧ-сигналы ω и ω* модулируются по фазе НЧ полезным сигналом и, который затем выделяется из ВЧ-сигналов ω и ω* методом фазового детектирования и др.
II. Повышение достоверности идентификации (классификации) обнаруженных китов достигается за счет следующего.
1. Использования информации, содержащейся в формах спектров ВЧ комбинационных частот и НЧ полезного сигнала, а также в частотных поддиапазонах НЧ полезного сигнала.
2. Использования информации об акустических лучах, не выходящих на поверхность моря и принятых n гидроакустическими приемниками.
3. Использования информации о величине изменения пеленга (ВИП) за выбранную единицу времени (например, за 1 мин).
III. Применение на повышенных (более ˜20 км/ч) скоростях хода СПС, при его движении по воде, достигается следующим.
1. Повышается акустическая чувствительность способа путем увеличения эффективности преобразования акустической энергии ВЧ-волн накачки в акустическую энергию ВЧ-волн комбинационных частот.
2. Используется многоканальная пространственная обработка модуляционного процесса и последующее суммирование НЧ полезного сигнала.
3. Используется многоканальная частотная обработка модуляционного процесса и последующее суммирование НЧ полезного сигнала в ХН.
4. Рассеянные ВЧ-сигналы ω и ω* модулируется по фазе НЧ полезным сигналом Ω, который затем выделяется из ВЧ-сигналов ω и ω* методом фазового детектирования и др.
IV. Применение на СПС, при его движении над водой (на подводных крыльях, воздушной подушке и т.д.) по воде, достигается следующим.
1. Используются m акустические брызгозащитные излучатели и m приемники для излучения и приема рассеянного ВЧ-сигнала ω*.
2. Используется многоканальная пространственная обработка модуляционного процесса и последующее суммирование НЧ полезного сигнала.
3. Используется многоканальная частотная обработка модуляционного процесса и последующее суммирование НЧ полезного сигнала в ХН и др.
V. Заблаговременное (дальнее) гидроакустическое вытеснение (отпугивание) китов с курса движения СПС достигается следующим.
1. В диапазоне максимальной акустической чувствительности китов формируется и излучается ВЧ-сигнал ω*, который воздействует на биологический гидролокатор кита и частично изменяет его поведенческие характеристики.
2. Формируется и излучается сигнал Ωхц хищника, который воздействует на нервную систему кита и изменяет его поведенческие характеристики и др.
Отличительными от прототипа признаками способа являются следующие.
1. В качестве носителя используется СПС.
2. Приемники n образуют круговой сектор и ориентированы, в основном, для приема акустических лучей, не выходящих на поверхность моря.
3. В качестве n частот используется базовая частота ω, соответствующая резонансной частоте ω0гпс рассеивателей звука доминирующих в ГПС и ее высшие гармоники 2ω, 3ω и т.д.
4. Дополнительно в диапазоне максимальной акустической чувствительности китов формируется, усиливается и излучается ВЧ-сигнал ω*, который воздействует на биологический гидролокатор кита и частично изменяет его поведенческие характеристики - кит изменяет направление своего движения.
5. Рассеянный на неоднородностях приповерхностных воздушного и водного слоев ВЧ-сигнал принимается с помощью m акустических брызгозащитных приемников, расположенных на корпусе СПС над водой, а также с помощью n гидроакустических приемников.
6. Рассеянные ВЧ-сигналы ω и ω* модулируется по фазе НЧ полезным сигналом Q, который затем выделяется из ВЧ-сигналов ω и ω* методом фазового детектирования.
7. Гидроакустические n и m акустические приемники к решающему устройству подключаются одновременно или параллельно и осуществляется многоканальная пространственная обработка ВЧ-сигналов ω и ω* с последующим суммированием НЧ полезного сигнала по каждой из n и m ХН.
8. Осуществляется многоканальная частотная обработка ВЧ ω и ω* с последующим суммированием НЧ полезного сигнала в каждой из n и m ХН.
9. Дополнительно формируются, усиливается и излучается сигнал Ωхщ хищника, который воздействует на нервную систему кита и полностью изменяет его поведенческие характеристики - кит разворачивается и уходит в обратном направлении от СПС.
10. Излучение сигналов хищника осуществляется в течение определенных интервалов времени при помощи n и m излучателей.
Наличие отличительных от прототипа признаков позволяет сделать вывод о соответствии заявляемого способа критерию "новизна".
Анализ известных технических решений с целью обнаружения в них указанных отличительных признаков, показал следующее.
Признаки 1, 4 и 5 являются новыми.
Признаки 2, 3, 7 и 8 являются новыми. В то же время известно использование признаков 2 и 3 в нелинейной гидроакустике, а признаков 7 и 8 - в радиотехнике.
Признак 6 известен в нелинейной гидроакустике, признак 9 известен в гидроакустике, а признаки 10 и 11 известны в биоакустике.
Таким образом, наличие новых существенных признаков, в совокупности с известными, обеспечивает появление у заявляемого решения нового свойства, не совпадающего со свойствами известных технических решений - на большой дальности обнаруживать опасные в навигационном отношении ММ - киты и др., в том числе и на повышенных (более 20 км/ч) скоростях хода СПС - при его движении по воде и при движении СПС в приповерхностном слое воздуха (на подводных крыльях и т.д.), с высокой достоверностью идентифицировать (классифицировать) ММ и с достаточной для практики точностью оценивать их пространственные координаты, а также заблаговременно вытеснять и отпугивать ММ с курса движения СПС
В данном случае имеем новую совокупность признаков и их новую взаимосвязь, причем не простое объединение новых признаков и уже известных в гидроакустике, а именно выполнение операций в предложенной последовательности и приводит к качественно новому эффекту.
Данное обстоятельство позволяет сделать вывод о соответствии разработанного способа критерию "существенные отличия".
На фиг.1 представлена функциональная схема устройства, с помощью которой реализуется разработанный способ.
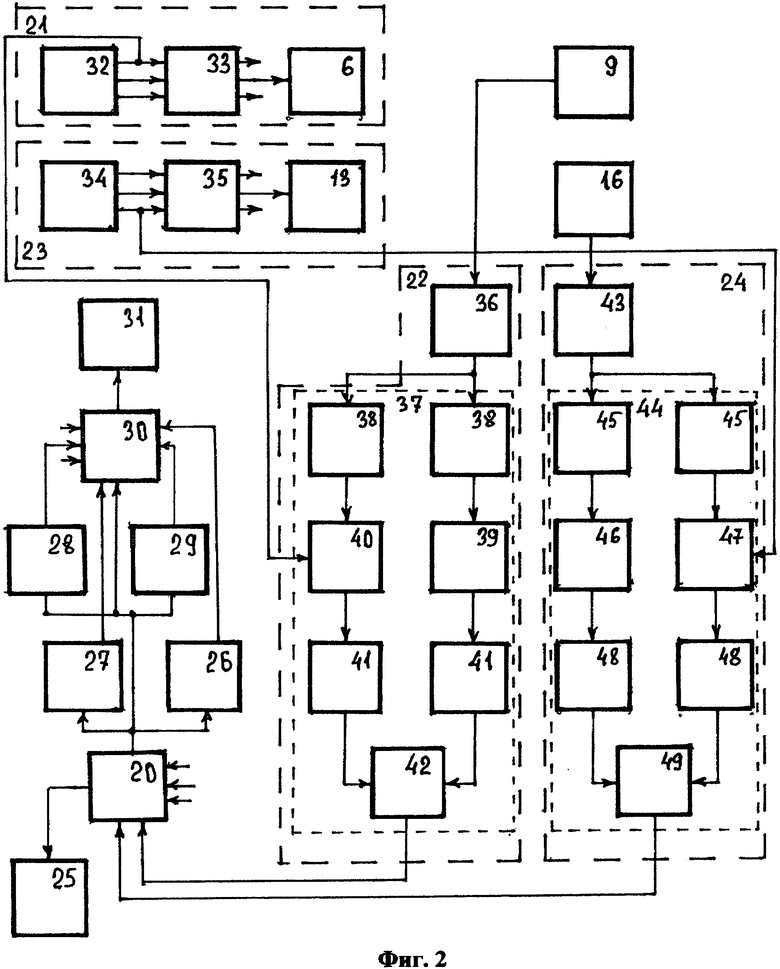
На фиг.2 представлена структурная схема устройства, с помощью которой реализуется разработанный способ в процессе дальнего (заблаговременного) обнаружения ММ: китов и др.
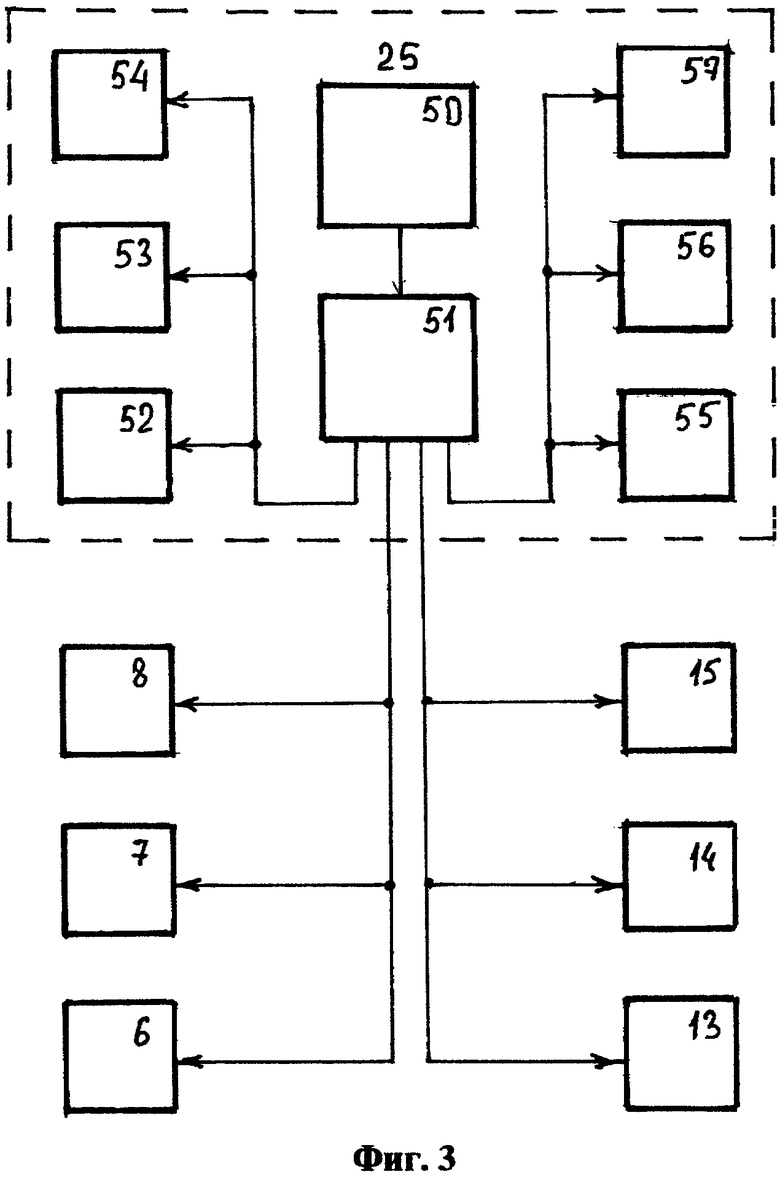
На фиг.3 представлена структурная схема устройства, с помощью которой реализуется разработанный способ в процессе заблаговременного гидроакустического вытеснения и отпугивания китов.
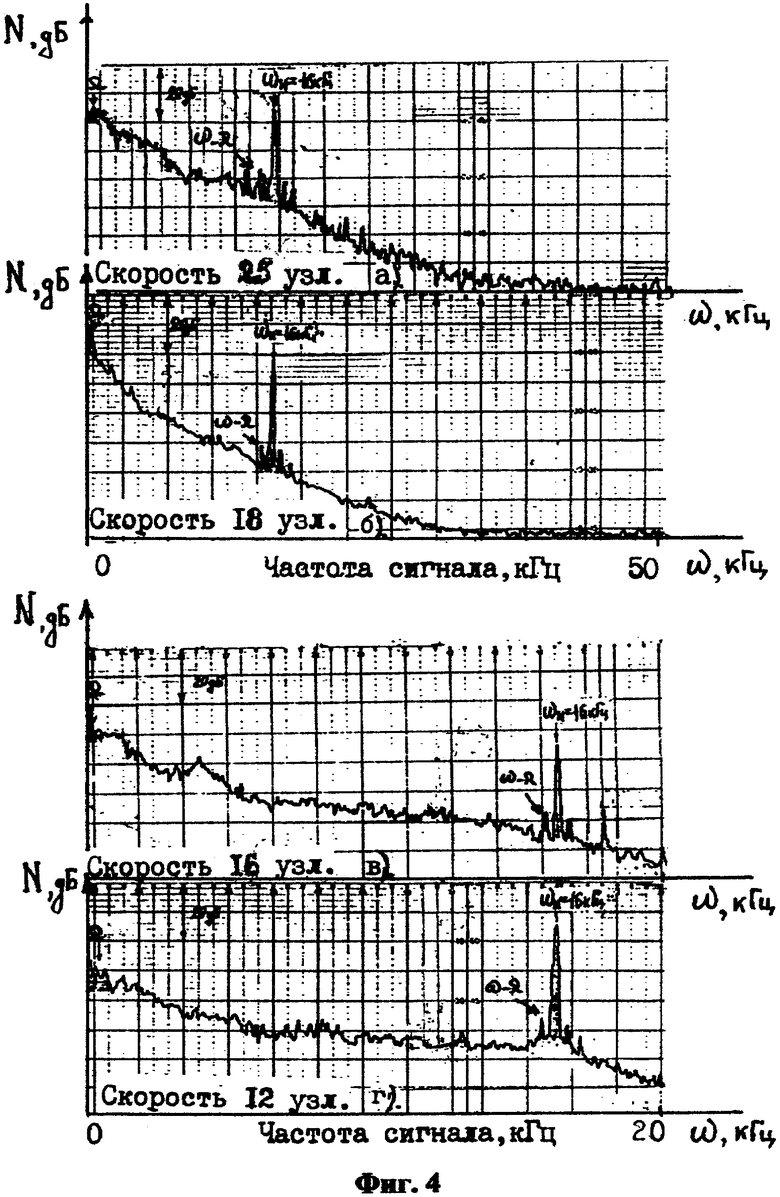
На фиг.4 представленные спектрограммы ВЧ-сигналов накачки частотой 16 кГц, рассеянные на неоднородностях водной среды и промодулированные НЧ полезными сигналами от ММ на различных (12-25 узл., или ˜20-40 км/ч) скоростях хода носителя.
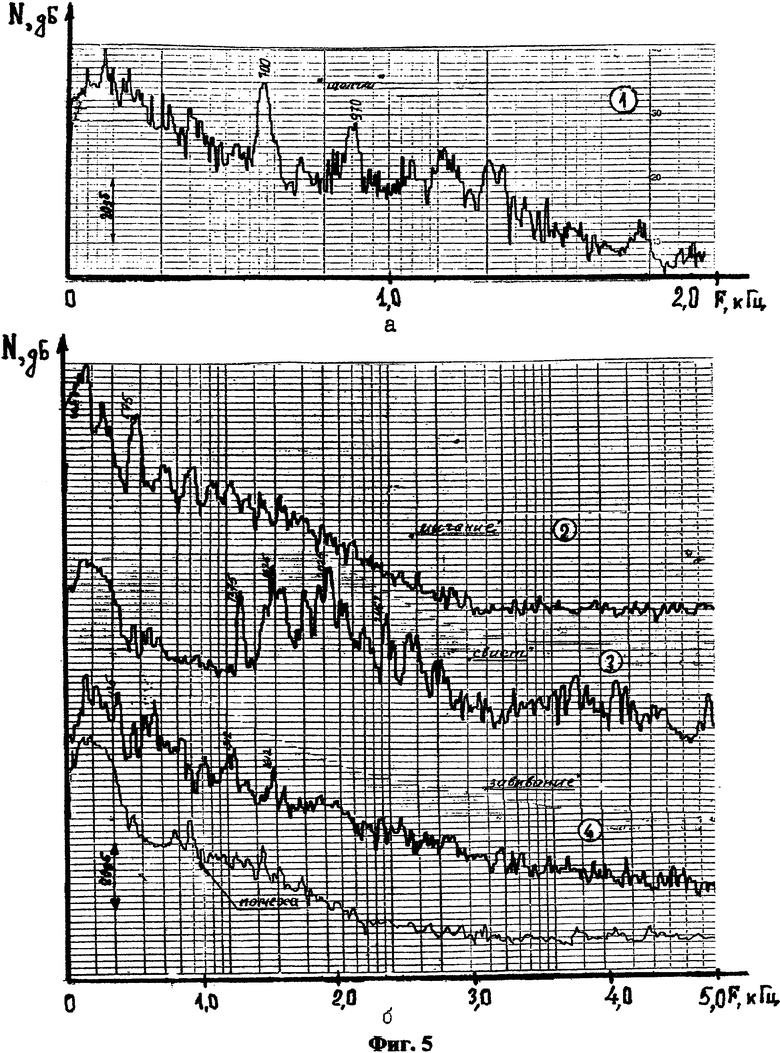
На фиг.5, в качестве примера, представленные спектрограммы НЧ полезных сигналов китов:кашалота (фиг.5а) и кита-горбача (фиг.5б).
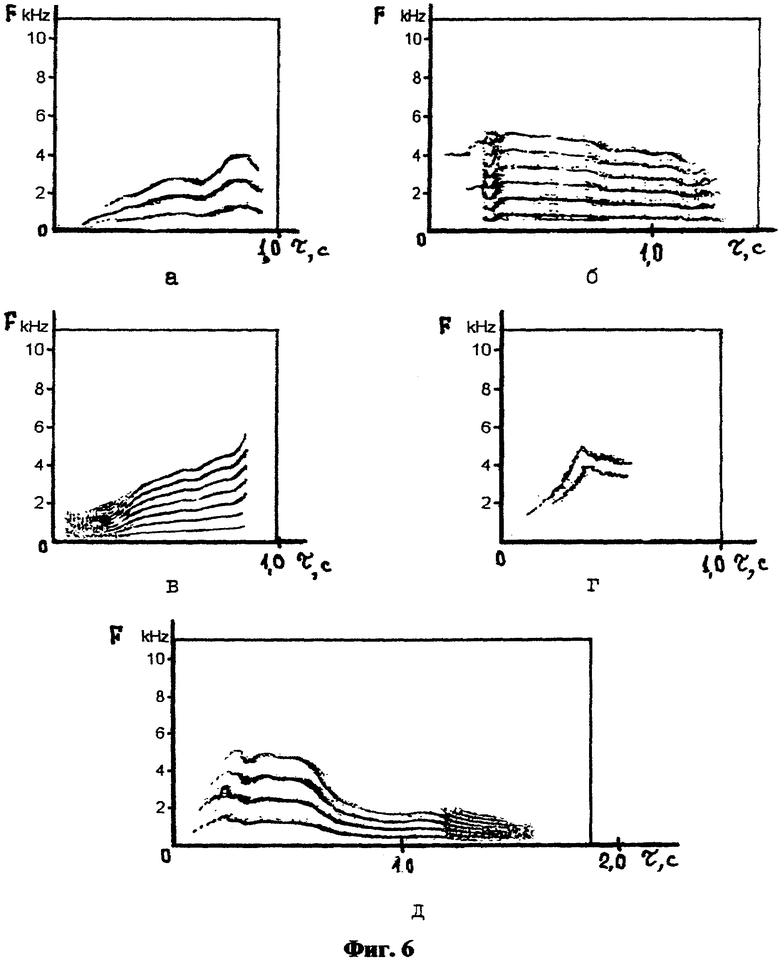
На фиг.6 представленные аудиограммы различных (коммуникационные и др.) сигналов хищника - косаток в процессе их жизнедеятельности.
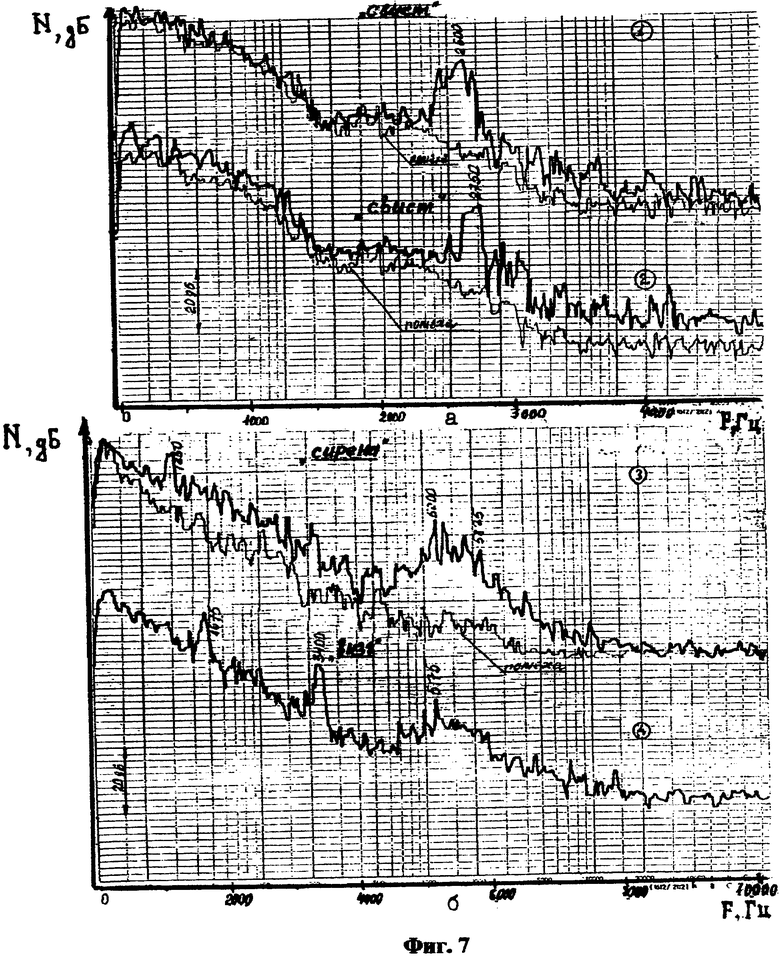
На фиг.7 представленные спектрограммы НЧ-сигналов хищника - косатки в процессе поиска жертвы.
Устройство содержит MM (1): кит и др., являющегося источником НЧ гидроакустических излучений на частоте Ω, СПС (2), на котором находятся: навигационная радиолокационная станция (3) с антенной (4), а также бортовая аппаратура (5), которая содержит идентичные друг другу n излучатели (6, 7, 8) ВЧ-сигнала накачки со и идентичные друг другу n приемники (9, 10, 11) ВЧ-сигнала накачки, каждые из которых расположены на подводной части корпуса СПС (2) на одинаковом угловом расстоянии друг от друга и ориентированы определенным образом в пространстве. При этом каждый из n излучателей (6-8) ВЧ-сигнала накачки и соответствующий ему n приемник (9-11) ВЧ-сигнала накачки разделяются идентичными друг другу гидроакустическими экранами (12) и объединены в соответствующие гидроакустические системы: 6-9, 7-10 и 8-11.
Бортовая аппаратура (5) также содержит идентичные друг другу m акустические (воздушные) брызгозащитные излучатели (13, 14, 15) ВЧ-сигнала ω* и идентичные друг другу m акустические брызгозащитные приемники (16, 17, 18) ВЧ-сигнала ω*, каждые из которых расположены на надводной части корпуса СПС (2) на одинаковом угловом расстоянии друг от друга и ориентированы определенным образом в пространстве. При этом каждый из m излучателей (13-15) ВЧ-сигнала накачки и соответствующий ему m приемник (16-18) ВЧ-сигнала разделяются идентичными друг другу акустическими экранами (19) и объединены в соответствующие акустические системы: 13-16, 14-17 и 15-18.
Кроме того, бортовая аппаратура (5) содержит: коммутатор (20) трактов, тракт (21) излучения ВЧ-сигнала накачки ω и тракт (22) приема ВЧ-сигнала накачки, тракт (23) излучения ВЧ-сигнала ω* и тракт (24) приема ВЧ-сигнала, тракт (25) излучения сигналов хищника, блок (26) оценки дистанции, блок (27) формирования ХН, блок (28) определения пеленга и ВИЛ, спектроанализатор (29) сигналов, решающее устройство (30) и устройство (31) оповещения (звукового, светового и т.д.) об обнаружении ММ (1).
Тракт (21) излучения ВЧ-сигнала накачки содержит последовательно электрически соединенные: многоканальный (по числу n излучателей) блок (32) формирования ВЧ-сигнала накачки на частоте ω и ее высших гармониках: 2ω и т.д., многоканальный (по числу n излучателей) блок (33) усиления ВЧ-сигнала накачки. При этом вход каждого из n излучателей (6-8) ВЧ-сигнала накачки подключен к соответствующему выходу блока (33). Тракт (23) излучения ВЧ-сигнала содержит последовательно электрически соединенные: многоканальный (по числу m излучателей) блок (34) формирования ВЧ-сигнала на частоте ω* и ее высших гармониках: 2ω* и т.д., многоканальный (по числу m излучателей) блок (35) усиления ВЧ-сигнала. При этом вход каждого из m излучателей (13-15) ВЧ-сигнала подключен к соответствующему выходу блока (35).
Тракт (22) приема ВЧ-сигнала накачки содержит усилитель высокой частоты (36) и идентичные друг другу n каналов (37), каждый из которых содержит идентичные друг другу n' (по числу гармоник ВЧ-сигнала накачки) полосовые фильтры (38), центральная частота каждого из которых равна частоте соответствующей гармоники ВЧ-сигнала накачки, идентичные друг другу n' амплитудные детекторы (39) с большим динамическим диапазоном и идентичные друг другу n' балансные смесители (40), идентичные друг другу 2 n' ФНЧ (41) и сумматор (42) канала, являющийся выходом данного канала.
Тракт (24) приема ВЧ-сигнала содержит усилитель высокой частоты (43) и идентичные друг другу m каналов (44), каждый из которых содержит идентичные друг другу m' (по числу гармоник ВЧ-сигнала) полосовые фильтры (45), центральная частота каждого из которых равна частоте соответствующей гармоники ВЧ-сигнала, идентичные друг другу m' амплитудные детекторы (46) с большим динамическим диапазоном и идентичные друг другу m' балансные смесители (47), идентичные друг другу 2 m' ФНЧ (48) и сумматор (49) канала, являющийся выходом данного канала.
Тракт (25) излучения сигналов хищника содержит последовательно электрически соединенные блок (50) формирования сигналов хищника Ωхщ и многоканальный усилитель (51) мощности, а также идентичные друг другу НЧ 1 (52, 53, 54) гидроакустические излучатели и идентичные друг другу НЧ k (55, 56, 57) акустические брызгозащитные излучатели. При том многоканальность усилителя мощности (51) определяется числом НЧ 1 гидроакустических излучателей и НЧ k акустических брызгозащитных излучателей, а также числом ВЧ n (6, 7, 8) гидроакустических излучателей и ВЧ m (13, 14, 15) акустических брызгозащитных излучателей.
Устройство функционирует следующим образом (фиг.1 - 3).
СПС (2) совершает плавание в море с ГПС, наличие которого обусловлено жизнедеятельностью МБО: зоопланктона, фитопланктона и т.д. Курс движущегося по воде СПС (2) под различными углами пересекают MM - киты и др., осуществляющие периодические всплытия на поверхность моря для дыхания, не обнаружимые с помощью навигационной радиолокационной станции (3) с антенной (4), а также являющиеся источником НЧ полезного сигнала на частоте Ω и представляющие, вследствие возможного столкновения с СПС (2), навигационную опасность для СПС (2).
В многоканальном блоке (32) тракта (21) формируется ВЧ-сигнала накачки на частоте ω, в диапазоне единиц-десятков кГц, и ее высших гармоник: 2ω, 3ω и т.д.; в многоканальном блоке (33) осуществляется усиление данного ВЧ-сигнала накачки до необходимого уровня, а с помощью n гидроакустических излучателей (6-8) осуществляется направленное излучение ВЧ-сигнала накачки в нелинейную (содержащую пузырьки воздуха и др.) водную среду: с помощью излучателя (6) - от поверхности моря до его дна и в сторону левого борта СПС (2), с помощью излучателя (7) - от поверхности моря до его дна и прямо по курсу СПС (2), с помощью излучателя (8) - от поверхности моря до его дна и в сторону правого борта СПС (2). Каждый из n гидроакустических излучателей (6-8) ВЧ-сигнала накачки и соответствующий ему n гидроакустический приемник (9-11) ВЧ-сигнала накачки объединены в соответствующие акустические системы: 6-9, 7-10 и 8-11 и разделяются гидроакустическими экранами (12), исключающими прямое попадание (или паразитную модуляцию) ВЧ-сигнала накачки с n излучателя на соответствующий ему n приемник.
В многоканальном блоке (34) тракта (23) формируется ВЧ-сигнал на частоте ω* и ее высших гармониках: 2 ω* и т.д., в многоканальном (по числу m излучателей) блоке (35) осуществляется усиления ВЧ-сигнала до необходимого уровня, а с помощью m акустических брызгозащитных излучателей (13-15) осуществляется направленное излучение ВЧ-сигнала в приповерхностные слои воды и воздуха: с помощью излучателя (13) - под острым (менее ˜20°) углом вниз и в сторону левого борта СПС (2), с помощью излучателя (14) - под острым углом вниз и прямо по курсу СПС (2), с помощью излучателя (15) - под острым углом вниз и в сторону правого борта СПС (2). При этом каждый из m акустических брызгозащитных излучателей (13-15) ВЧ-сигнала и соответствующий ему m акустический брызгозащитный приемник (16-18) ВЧ-сигнала объединены в соответствующие акустические системы: 13-16, 14-17 и 15-18 и разделяются акустическими экранами (19), исключающими прямое попадание (или паразитную модуляцию) ВЧ-сигнала с m излучателя на соответствующий ему m приемник.
Частично рассеиваясь в приповерхностном пузырьковом слое (ППС) за счет бокового поля ХН излучателя, полностью рассеиваясь в ГПС (излучение по оси ХН излучателя) и частично рассеиваясь в донном пузырьковом слое (ДПС) за счет бокового поля ХН излучателя, ВЧ-сигнал накачки на частоте ω и ее высших гармониках модулируется по амплитуде и фазе (частоте) НЧ полезным сигналом Ω. При этом в нелинейной водной среде образуются различные ВЧ комбинационные частоты: ω± Ω, 2ω± Ω и т.д., которые затем принимаются соответствующим n гидроакустическим приемником (9-11).
В тракте (22), принятый, а ранее рассеянный на неоднородностях водной среды и промодулированный по амплитуде и фазе НЧ полезным сигналом, ВЧ-сигнал: ω± Ω, 2ω± Ω и т.д. с выхода приемника (9) поступает на усилитель (36) ВЧ, в котором происходит его усиление до необходимого уровня. При этом ширина основного максимума ХН максимальна и равна 3Θ - при использовании базовой частоты ВЧ-сигнала накачки ω, минимальна и равна Θ - при использовании третьей гармоники базовой частоты 3ω.
С выхода усилителя (36) ВЧ-сигнал накачки одновременно поступает для уменьшения влияния НЧ и ВЧ помех вне рабочего диапазона полосового фильтра, на идентичные друг другу n' - по числу гармоник ВЧ-сигнала накачки, полосовые фильтры (28) n каналов (37), центральная частота каждого из n' фильтров (38) равна частоте соответствующей гармоники ВЧ-сигнала накачки: центральная частота первого из n' полосовых фильтров соответствует базовой частоте ω, центральная частота второго из n' полосовых фильтров соответствует второй гармонике базовой частоты ω - частоте 2ω и т.д., а также для экспресс-анализа на вход спектроанализатора (29). В спектроанализаторе (29) по особенностям спектра ВЧ-сигнала осуществляется первичная классификация (идентификация) обнаруженного подводного объекта, т.е. объекта, не наблюдаемого с помощью радиолокационной станции (3) с антенной (4) СПС (2) на классы: обитаемый подводный аппарат (ОПА) - модуляционные частоты имеют форму прямоугольных треугольников вершиной вверх; MM - модуляционные частоты имеют форму импульсных, длительностью до нескольких секунд, тональных сигналов.
С выхода каждого из n' полосовых фильтров (38) ВЧ-сигнал: ω± Ω, 2ω± Ω, и т.д. поступает на каждый из соответствующих ему n' амплитудных детекторов (39) с большим динамическим диапазоном и на каждый их соответствующих ему n' балансных смесителей (40) - фазовых (частотных) детекторов. При этом на второй (опорный) вход каждого из n' балансных смесителей (40) с соответствующего выхода многоканального блока (32) тракта (21) поступает ВЧ-сигнал накачки на частоте ω и ее высших гармониках. В каждом из n' амплитудных детекторов (39) и в каждом из n' балансных смесителей (40) осуществляется выделение НЧ полезного сигнала Ω из ВЧ-сигнала ω± Ω, 2ω± Ω и т.д. методом амплитудного и фазового (частотного) детектирования соответственно. Решение о наличии НЧ полезного сигнала Ω принимается на основании превышения его уровня некоторого порогового уровня, заранее установленного для данных помехосигнальных и гидролого-акустических условий.
С выхода каждого из n' амплитудных детекторов (39) и с выхода каждого из n' балансных смесителей (40) НЧ полезный сигнал Ωi поступает, для уменьшения влияние ВЧ-помех, на соответствующий 2n' ФНЧ (41). С выхода каждого из 2n' ФНЧ (31) НЧ полезный сигнал и поступает на соответствующий вход сумматора (42), являющегося выходом данного n канала. Далее НЧ полезный сигнал Ω, через коммутатор трактов (20), параллельно поступает: в блок (26) оценки дистанции, блок (27) формирования ХН, блок (28) определения пеленга и ВИЛ и спектроанализатора (29).
Принцип работы тракта (23) излучения ВЧ-сигнала ω* и тракта (24) приема ВЧ-сигнала, аналогичен принципу работы тракта (21) излучения ВЧ-сигнала накачки ω и тракту (22) приема ВЧ-сигнала накачки соответственно. При этом тракты (23) и (24) являются, с точки зрения решаемой задачи, приоритетными при движении СПС (2) в приповерхностном воздушном пространстве (на подводных крыльях, на воздушной подушке и т.д.), а такты (21) и (22) являются приоритетными при движении СПС (2) по воде.
Рассеиваясь в приповерхностных воздушном и водном пузырьковых слоях, ВЧ-сигнал на частоте ω* и ее высших гармониках модулируется по амплитуде и фазе (частоте) НЧ полезным сигналом Ω. При этом в нелинейной среде (в воздушной - с каплями воды и в водной - с пузырьками воздуха) образуются различные ВЧ комбинационные частоты: ω*± Ω, 2ω*± Ω и т.д., которые затем принимаются соответствующим m акустическими брызгозащитными приемниками (16-18).
В тракте (24), принятый, а ранее рассеянный на неоднородностях сред (приповерхностной воздушной и приповерхностной водной) и промодулированный по амплитуде и фазе НЧ полезным сигналом, ВЧ-сигнал: ω*± Ω, 2ω*± Ω и т.д. с выхода приемника (16) поступает на усилитель (43) ВЧ, в котором происходит его усиление до необходимого уровня. При этом ширина основного максимума ХН максимальна и равна 3Θ* - при использовании базовой частоты ВЧ-сигнала ω*, минимальна и равна Θ* - при использовании третьей гармоники базовой частоты 3ω*.
С выхода усилителя (43) ВЧ-сигнал одновременно поступает, для уменьшения влияния НЧ и ВЧ помех вне рабочего диапазона полосового фильтра, на идентичные друг другу m' - по числу гармоник ВЧ-сигнала, полосовые фильтры (45) m каналов (44), центральная частота каждого из m' фильтров (45) равна частоте соответствующей гармоники ВЧ-сигнала: центральная частота первого из m' полосовых фильтров соответствует базовой частоте ω*, центральная частота второго из m' полосовых фильтров соответствует второй гармонике базовой частоты ω* - частоте 2ω* и т.д., а также для экспресс-анализа на вход спектроанализатора (29). В спектроанализаторе (29) по особенностям спектра ВЧ-сигнала осуществляется первичная классификация (идентификация) обнаруженного подводного объекта, т.е. объекта, не наблюдаемого с помощью радиолокационной станции (3) с антенной (4) СПС (2) на классы: обитаемый подводный аппарат (ОПА) - модуляционные частоты имеют форму прямоугольных треугольников вершиной вверх; MM - модуляционные частоты имеют форму импульсных, длительностью до нескольких секунд, тональных сигналов.
С выхода каждого из m' полосовых фильтров (45) ВЧ-сигнал: ω*± Ω, 2ω*± Ω и т.д. поступает на каждый из соответствующих ему m' амплитудных детекторов (46) с большим динамическим диапазоном и на каждый их соответствующих ему m' балансных смесителей (47) - фазовых (частотных) детекторов. При этом на второй (опорный) вход каждого из m' балансных смесителей (47) с соответствующего выхода многоканального блока (34) тракта (23) поступает ВЧ-сигнал на частоте ω* и ее высших гармониках. В каждом из m' амплитудных детекторов (46) и в каждом из m' балансных смесителей (47) осуществляется выделение НЧ полезного сигнала и из ВЧ-сигнала ω*± Ω, 2ω*± Ω и т.д. методом амплитудного и фазового (частотного) детектирования соответственно. Решение о наличии НЧ полезного сигнала Ω принимается на основании превышения его уровня некоторого порогового уровня, заранее установленного для данных помехосигнальных и гидролого-акустических условий.
С выхода каждого из m' амплитудных детекторов (46) и с выхода каждого из m' балансных смесителей (47) НЧ полезный сигнал Ωi поступает, для уменьшения влияние ВЧ помех, на соответствующий 2m' ФНЧ (48). С выхода каждого из 2m' ФНЧ (48) НЧ полезный сигнал Ω поступает на соответствующий вход сумматора (49), являющегося выходом данного n канала. Далее НЧ полезный сигнал Ω, через коммутатор трактов (20), параллельно поступает: в блок (26) оценки дистанции, блок (27) формирования ХН, блок (28) определения пеленга и ВИП и спектроанализатора (29).
В блоке (26), на основании расчетной дальности обнаружения того или иного ММ (1) в данных гидролого-акустических и помехосигнальных условиях, по расчетному и текущему значениям сигнал/помеха и по другим признакам оценивается дистанция до обнаруженного ММ (1). В спектроанализаторе (29) по особенностям спектра НЧ-сигнала осуществляется вторичная классификация обнаруженного ММ (1) на подклассы: кит, дельфин и т.д.
Одновременно с этим, в блоке (27) осуществляется формирование характеристик направленности (в зависимости от используемых гармоник ВЧ-сигнала накачки ω и ВЧ-сигнала ω*), а в блоке (28), по максимальному отношению сигнала/помеха, определяется пеленг на обнаруженное ММ (1) и ВИЛ в течение заданного интервала времени (например, за 1 мин).
С выходов: спектроанализатора (29), блока (26) оценки дистанции, блока (27) формирования ХНХН, блока (28) определения пеленга и ВИЛ, а также от других технических средств (навигационная радиолокационная станция, навигационный эхолот, лаг и т.д.) соответствующая информация поступает в решающее устройство (30). При этом с выхода решающего устройства (30) сигнал на вход устройства (31) оповещения (звукового, светового и т.д.) об обнаружении ММ (1) подается сразу же после первичного обнаружения, первичной и вторичной классификации. После этого СПС (2) уменьшает ход до минимального и начинает движение по воде. Затем осуществляется окончательная классификация обнаруженного ММ (1) и определяются его пространственные координаты, а также принимаются меры (изменяется курс, стопорится ход, непрерывно подаются сигналы, отпугивающие ММ и т.д.) по предотвращению столкновений с ММ (1). При этом в решающее устройство (30) постоянно поступают данные о вновь обнаруженных сигналах различных источников, в том числе и от ММ (1), гидролого-акустических условиях и волнении моря в данном географическом районе и др. (решающее устройство является адаптивной системой - приспосабливается к изменяющимся внешним условиям, а при принятии решения учитывает текущие параметры окружающей среды, а также самообучающей системой - постоянно совершенствует алгоритм принятия решения).
Одновременно с этим прямой ВЧ-сигнал на частоте ω* и ее высших гармониках: 2ω* и т.д. воздействует на биологический гидролокатор MM (1): кита и др., и частично изменяет его поведенческие характеристики - кит изменяет направление своего движения.
В течение определенных интервалов времени - в процессе движения СПС (2) по воде или в приповерхностном воздушном слое (на подводных крыльях, на воздушной подушке и т.д.), или непрерывно - после обнаружения ММ (1) и уменьшения хода СПС (2), в блоке (50) тракта (25) осуществляется формирования сигналов хищника Ωхщ, а в многоканальном усилителе (51) мощности осуществляется усиление данных сигналов до необходимого уровня. В дальнейшем, с помощью идентичных друг другу НЧ 1 (52, 53, 54) гидроакустических излучателей и идентичных друг другу НЧ k (55, 56, 57) акустических брызгозащитных излучателей, а также идентичных другу другу ВЧ n (6, 7, 8) гидроакустических излучателей и ВЧ m (13, 14, 15) акустических брызгозащитных излучателей осуществляется излучение сигналов хищника Ωхщ в приповерхностном воздушном и в приповерхностном водном слоях, а также в глубинном водном слое по всему пространству вокруг СПС (2). Данный прямой сигнал хищника Ωхщ воздействует на всю нервную систему ММ (1) - кита и полностью изменяет его поведенческие характеристики: кит разворачивается и уходит в обратном направлении от СПС (2).
Пример реализации способа.
При проведении морских испытаний [4] использовались:
- параметрическая приемная антенная решетка (ППАР), состоящая из трех пар идентичных ВЧ гидроакустических преобразователей: ВЧ излучателей (6-8) и ВЧ приемников (9-11) сигнала накачки ω и ее высших гармоник: 2ω, 3ω и т.д., от станции МГ-7М, имеющих в своей амплитудно-частотной характеристике три резонансные частоты: 48 кГц (ширина основного максимума ХН преобразователя ˜60°), 96 кГц и 144 кГц;
- три пары идентичных ВЧ акустических брызгозащитных преобразователей: ВЧ-излучателей (13-15) и ВЧ-приемников (16-18) сигнала частотой ω* и ее высших гармоник: 2ω* и т.д. в рабочем диапазоне от сотен Гц до 24 кГц;
- три блока ПИ-1 от изделия «Полином», используемых в качестве НЧ 1 (52, 53, 54) гидроакустических излучателей;
- три рупорных громкоговорителя, используемых в качестве НЧ k (55, 56, 57) акустических брызгозащитных излучателей.
На фиг.4 представленные спектрограммы ВЧ-сигналов накачки частотой 16 кГц, рассеянные на неоднородностях водной среды и промодулированные НЧ полезными сигналами от MM - китов на различных (12, 16, 16 и 25 узл., или ˜ от 20 до 45 км/ч) скоростях хода судна, движущегося по воде.
Как видно из фиг.4 на всех указанных выше скоростях хода судна регистрируются комбинационные частоты ω± Ω, несмотря на то, что уровень НЧ акустических помех возрос ˜ на 30 дБ при увеличении скорости хода носителя ˜ в 2 раза: с 12 узл. (фиг.4г) до 25 узл. (фиг.4а).
На фиг.5, в качестве примера, представленные спектрограммы НЧ-сигналов китов: кашалота (фиг.5а) и кита-горбача (фиг.56). Как видно из фиг.5 в спектрах сигналов китов в обязательном порядке регистрируются НЧ составляющие в диапазоне частот десятки Гц, которые используются при классификации ММ на подклассы: киты, дельфины и др. При этом сигналы китов-горбачей более разнообразны (спектрограммы №№2-4 на фиг.5б).
На фиг.6 представленные аудиограммы различных сигналов хищника - косаток в процессе их жизнедеятельности. Как видно из фиг.6, диапазон частот данных сигналов простирается от сотен Гц до ˜5 кГц.
На фиг.7 представленные спектрограммы НЧ сигналов хищника - косатки в процессе поиска жертвы. Как видно из фиг.7, диапазон частот данных сигналов простирается ˜ от 3 кГц до ˜5 кГц.
При этом:
I. Увеличение дальности обнаружения и определения пространственных координат китов достигнуто за счет следующего.
1. Многоканальной пространственной обработки модуляционного процесса и последующего суммирования НЧ полезного сигнала по каждой из ХН.
2. Многоканальной частотной обработки модуляционного процесса и последующего суммирования НЧ полезного сигнала в данной ХН.
3. Повышения акустической чувствительности способа путем увеличения эффективности преобразования акустической энергии ВЧ-волн накачки в акустическую энергию ВЧ-волн комбинационных частот.
4. Рассеянные ВЧ-сигналы ω и ω* модулировались по фазе НЧ полезным сигналом Ω, который затем выделялся из ВЧ-сигналов ω и ω* методом фазового детектирования и др.
II. Повышение достоверности идентификации (классификации) обнаруженных китов достигнуто за счет следующего.
1. Использования информации, содержащейся в формах спектров ВЧ комбинационных частот и НЧ полезного сигнала, а также в частотных поддиапазонах НЧ полезного сигнала.
2. Использования информации об акустических лучах, не выходящих на поверхность моря и принятых n гидроакустическими приемниками.
3. Использования информации о величине изменения пеленга (ВИЦ) за выбранную единицу времени (например, за 1 мин).
III. Применение на повышенных (более ˜20 км/ч) скоростях хода СПС, при его движении по воде, достигнуто следующее.
1. Повышалась акустическая чувствительность способа путем увеличения эффективности преобразования акустической энергии ВЧ-волн накачки в акустическую энергию ВЧ-волн комбинационных частот.
2. Использовалась многоканальная пространственная обработка модуляционного процесса и последующее суммирование НЧ полезного сигнала.
3. Использовалась многоканальная частотная обработка модуляционного процесса и последующее суммирование НЧ полезного сигнала в ХН.
4. Рассеянные ВЧ-сигналы ω и ω* модулировались по фазе НЧ полезным сигналом Ω, который затем выделялся из ВЧ-сигналов ω и ω* методом фазового детектирования и др.
IV. Применение на СПС, при его движении над водой (на подводных крыльях, воздушной подушке и т.д.) по воде, достигнуто следующее.
1. Использовались m акустические брызгозащитные излучатели и m приемники для излучения и приема рассеянного ВЧ-сигнала ω*.
2. Использовалась многоканальная пространственная обработка модуляционного процесса и последующее суммирование НЧ полезного сигнала.
3. Использовалась многоканальная частотная обработка модуляционного процесса и последующее суммирование НЧ полезного сигнала в ХН и др.
V. Заблаговременное (дальнее) гидроакустическое вытеснение (отпугивание) китов с курса движения СПС достигнуто следующее.
1. В диапазоне максимальной акустической чувствительности китов формировался и излучался ВЧ-сигнал ω*, который воздействовал на биологический гидролокатор кита и частично изменял его поведенческие характеристики.
2. Формировался и излучался сигнал Ωхщ хищника, который воздействовал на нервную систему кита и изменял его поведенческие характеристики и др.
Литература
1. Роберт Дж. Урик Основы гидроакустики. - Л.: Судостроение, 1978, 445 с.
2. Патент США №3882444, кл. G01S 9/66, 1975.
3. Бахарев С.А. Патент РФ №2215304 по заявке №2002102298 от 25.01.02 г.
4. Бахарев С.А. и др. Исследования влияния гидрофизических параметров морской среды на акустическое поле в морской шельфовой зоне. Отчет о НИР «Акватория». - Минрыбхоз. - Владивосток. - Дальрыбвтуз, 1998, 167 с.
Изобретение относится к области гидроакустики и может быть использовано для отпугивания китов от скоростных пассажирских судов (СПС). Способ включает в себя формирование, усиление и излучение высокочастотного (ВЧ) сигнала накачки в водную среду на n частотах с помощью n гидроакустических излучателей, расположенных на корпусе СПС. При этом базовая частота ВЧ-сигнала накачки соответствует резонансной частоте рассеивателей звука, доминирующих в области взаимодействия волн. Рассеянный и промодулированный по амплитуде низкочастотным (НЧ) полезным сигналом ВЧ-сигнал накачки принимается с помощью n приемников, расположенных на корпусе СПС, при этом направленность по приему формируется за счет волновых размеров каждого из n приемников и соответствующей ему частота ВЧ-сигнала накачки, из которого методом детектирования выделяется НЧ полезный сигнал. Определение направления на его источник осуществляется по максимальному значению НЧ полезного сигнала путем последовательного подключения к решающему устройству каждого из n приемников. При этом n приемники образуют круговой сектор наблюдения и ориентированы, в основном, для приема акустических лучей, не выходящих на поверхность моря. В качестве n частот используется базовая частота, соответствующая резонансной частоте рассеивателей звука, доминирующих в глубинном пузырьковом слое. Дополнительно в диапазоне максимальной акустической чувствительности китов формируется, усиливается и излучается ВЧ-сигнал в приповерхностные воздушный и водный слои с помощью m акустических брызгозащитных излучателей, расположенных на корпусе СПС над водой, а рассеянный на неоднородностях приповерхностных воздушного и водного слоев ВЧ-сигнал принимается с помощью m акустических брызгозащитных приемников. С помощью n гидроакустических приемников, дополнительно рассеянные ВЧ-сигналы модулируются по фазе НЧ полезным сигналом, который затем выделяется из ВЧ-сигналов методом фазового детектирования. Дополнительно n гидроакустические и m акустические приемники подключаются к решающему устройству одновременно или параллельно друг другу. Дополнительно формируются, усиливаются и излучаются сигналы хищника - косатки в момент атаки на жертву - кита. Технический результат: обеспечение безопасности мореплавания СПС и сохранения жизни китов. 7 ил.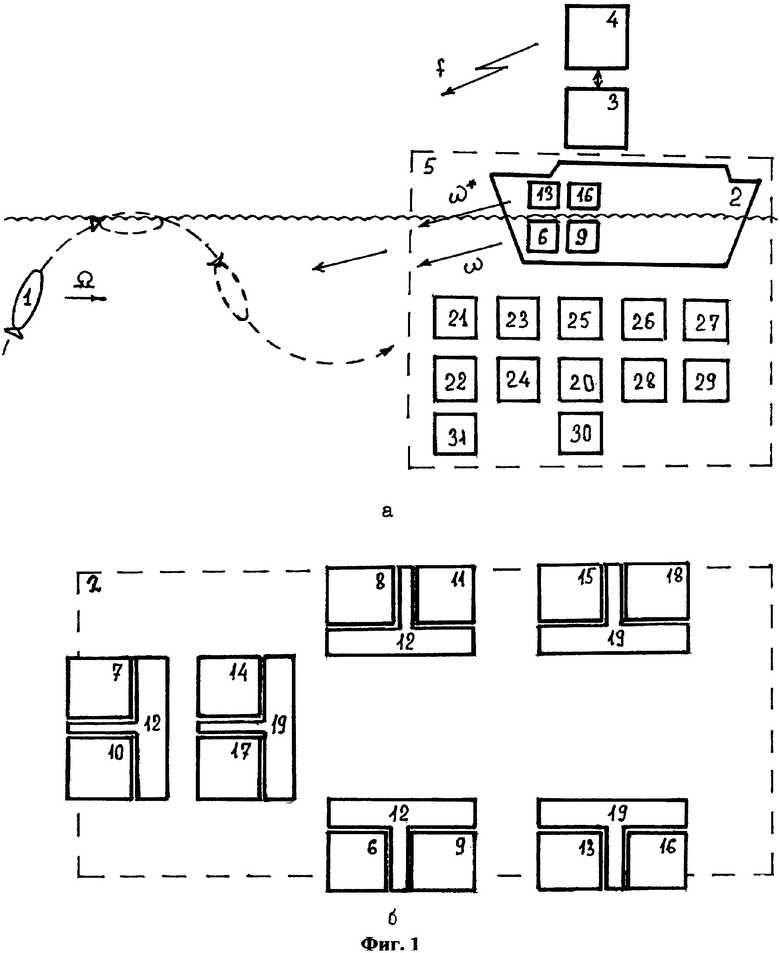
Способ дальнего обнаружения и отпугивания китов от скоростных пассажирских судов, заключающийся в формировании, усилении и излучении высокочастотного сигнала накачки в водную среду на n частотах ω с помощью n гидроакустических излучателей, расположенных на корпусе носителя, при этом базовая частота высокочастотного сигнала накачки соответствует резонансной частоте ω0 рассеивателей звука, доминирующих в области взаимодействия волн, рассеянный и промодулированный по амплитуде низкочастотным полезным сигналом высокочастотный сигнал накачки принимается с помощью n приемников, расположенных на корпусе носителя, при этом направленность по приему формируется за счет волновых размеров каждого из n приемников и соответствующей ему частоты высокочастотного сигнала накачки, из принятого высокочастотного сигнала накачки выделяется низкочастотный полезный сигнал методом детектирования, а определение направления на его источник осуществляется по максимальному значению низкочастотного полезного сигнала путем последовательного подключения к решающему устройству каждого из n приемников, отличающийся тем, что в качестве носителя используется скоростное пассажирское судно, n приемники образуют круговой сектор наблюдения и ориентированы, в основном, для приема акустических лучей, не выходящих на поверхность моря, в качестве n частот используется базовая частота ω, соответствующая резонансной частоте ω0гпс рассеивателей звука, доминирующих в глубинном пузырьковом слое, и ее высшие гармоники 2ω, 3ω и т.д., дополнительно в диапазоне максимальной акустической чувствительности китов формируется, усиливается и излучается высокочастотный сигнал ω* в приповерхностные воздушный и водный слои с помощью m акустических брызгозащитных излучателей, расположенных на корпусе скоростного пассажирского судна над водой, прямой высокочастотный сигнал воздействует на биологический гидролокатор кита и частично изменяет его поведенческие характеристики - кит изменяет направление своего движения, а рассеянный на неоднородностях приповерхностных воздушного и водного слоев высокочастотный сигнал принимается с помощью m акустических брызгозащитных приемников, расположенных на корпусе скоростного пассажирского судна над водой, а также с помощью n гидроакустических приемников, дополнительно рассеянные высокочастотные сигналы ω и ω* модулируются по фазе низкочастотным полезным сигналом Ω, который затем выделяется из высокочастотных сигналов ω и ω* методом фазового детектирования, дополнительно n гидроакустические и m акустические приемники к решающему устройству подключаются одновременно или параллельно друг другу и осуществляется многоканальная пространственная обработка высокочастотных сигналов ω и ω* с последующим суммированием низкочастотного полезного сигнала по каждой из n и m характеристик направленности, дополнительно осуществляется многоканальная частотная обработка высокочастотных сигналов ω и ω* с последующим суммированием низкочастотного полезного сигнала в каждой из n и m характеристик направленности, дополнительно формируются, усиливаются и излучаются сигналы Ωхщ хищника - косатки в момент атаки на жертву - кита, прямой сигнал хищника воздействует на всю нервную систему кита и полностью изменяет его поведенческие характеристики - кит разворачивается и уходит в обратном направлении от скоростного пассажирского судна, при этом излучение сигналов хищника осуществляется в течение определенных интервалов времени при помощи n гидроакустических и m акустических излучателей.
| СПОСОБ ОБНАРУЖЕНИЯ МОРСКИХ ОБЪЕКТОВ ПРИ ВСПЛЫТИИ ПОДВОДНОГО АППАРАТА | 2002 |
|
RU2215304C2 |
| СПОСОБ ОБНАРУЖЕНИЯ НИЗКОЧАСТОТНЫХ ГИДРОАКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ | 1995 |
|
RU2096808C1 |
| US 3882444 A, 06.05.1975 | |||
| GB 1556461 A, 28.11.1979. | |||

