Изобретение относится к области нелинейной гидроакустики и может быть использовано в подводных аппаратам для обеспечения навигационной безопасности их мореплавания.
Задача, которая решается изобретением, заключается в обнаружении и идентификации морских объектов по информации, содержащейся в акустических высокочастотных (ВЧ) волнах комбинационных частот, а также определении направления на морской объект, находящийся в надводном или подводном положении, относительно простым способом в условиях подводного аппарата для обеспечения его навигационной безопасности плавания и всплытия на поверхность моря.
Способ реализуется следующим образом. С помощью n излучателей, расположенных на одинаковом угловом расстоянии на корпусе подводного аппарата и ориентированных определенным образом в пространстве (один из излучателей - в сторону поверхности моря, один из излучателей - вправо от аппарата, один из излучателей - влево от аппарата, один из излучателей - в направлении дна моря), излучается ВЧ сигнал накачки на n частотах в нелинейную водную среду. При этом базовая частота (n=1) ВЧ сигнала накачки соответствует резонансной частоте приповерхностного пузырькового слоя (ППС). Рассеиваясь на неоднородностях водной среды (поверхность моря и ППС, биологические неоднородности в толще воды и в придонном слое воды, а также дно моря), ВЧ сигнал накачки, будучи промодулированным низкочастотным (НЧ) полезным (сигналы и шумы морских объектов) сигналом, принимается с помощью n приемников, расположенных определенным образом на корпусе подводного аппарата. При этом с помощью одного из n приемников принимаются отраженные поверхности моря и ППС, с помощью одного из n приемников принимаются отраженные от биологических неоднородностей, находящихся в толще воды справа от подводного аппарата, с помощью одного из n приемников принимаются отраженные от биологических неоднородностей, находящихся в толще воды слева от подводного аппарата, с помощью одного их n приемников принимаются отраженные от биологических неоднородностей, находящихся в придонном слое воды, а также дном моря, ВЧ сигналы накачки, промодулированные НЧ полезным сигналом. В соответствующих блоках усиления и обработки осуществляется выделение НЧ полезного сигнала из ВЧ сигналов комбинационных частот методом демодуляции, а также выделение информативных признаков о морских целях, содержащихся в НЧ полезном сигнале. Определение направления на источник НЧ гидроакустических излучений осуществляется по его максимальному значению путем последовательного подключения к решающему устройству каждого из n приемников. Производя спектральный анализ принятого НЧ полезного сигнала и сравнивая его с эталонным сигналом, принимают решение о характеристиках источника НЧ гидроакустических излучений.
Известен способ обнаружения морских объектов по их первичному акустическому полю, заключающийся в приеме шумов и сигналов в звуковом и ультразвуковом диапазонах частот, их усилении, спектральном анализе (с целью выделения наиболее информативных классификационных признаков), сравнении их с эталонным сигналом и принятии решения об обнаружении морских объектов /1, стр. 342/.
К недостаткам данного способа относится следующее.
1. Ограниченная дальность действия.
2. Ограниченный угловой сектор наблюдения.
3. Невозможность применения в условиях подводного аппарата.
Известен способ обнаружения морских объектов по их вторичному акустическому полю, заключающийся в формировании и излучении в направлении объекта поиска импульсного сигнала ультразвукового диапазона частот, лоцировании объекта поиска, приеме отраженного сигнала (эхо-сигнала), сравнении его с эталонным сигналом и принятие решения об обнаружении морского объекта /1, стр.91/.
К недостаткам данного способа относится следующее.
1. Ограниченная дальность действия.
2. Ограниченный угловой сектор наблюдения.
3. Низкая достоверность классификации морских целей.
Известен способ обнаружения источника НЧ гидроакустических излучений, заключающийся в формировании, усилении и излучении шумового ВЧ сигнала накачки, приеме сигналов комбинационных частот, нахождении функции корреляции между принятым сигналом накачки и задержанным случайным шумовым сигналом, формировании эквивалентной приемной антенной решетки, выделении НЧ полезного сигнала из ВЧ комбинационных частот, его спектральном анализе и сравнении с эталонным сигналом /2/.
К недостаткам данного способа относится следующее.
1. Ограниченная дальность действия.
2. Сложность в обеспечении сканирования характеристики направленности (ХН) антенны.
3. Невозможность обнаружения акустических сигналов в диапазоне частот ниже 35 Гц.
4. Низкая достоверность классификации.
Наиболее близким по технической сущности к заявляемому относится способ (выбранный в качестве способа-прототипа) обнаружения морских объектов, заключающийся в формировании и излучении с помощью n излучателей, расположенных определенным на корпусе судна и ориентированных определенным образом относительно источника НЧ сигналов, ВЧ сигнала накачки на n частотах (n = 2,3,4 и т. д.) в нелинейную водную среду в направлении дна моря, приеме ВЧ сигналов комбинационных частот с помощью n приемников, расположенных определенным образом на корпусе судна, выделении из ВЧ сигнала комбинационных частот НЧ полезного сигнала методом амплитудной демодуляции в многоканальном (n каналов) блоке обработки сигналов, формировании и сканировании ХН антенны в заданной плоскости, спектральном анализе НЧ сигнала и принятии решения об обнаружении его источника /3/.
К недостаткам данного способа относится следующее.
1. Ограниченная дальность действия из-за низкой акустической чувствительности.
2. Ограниченный сектор наблюдения из-за невозможности обнаружения морских объектов, находящихся сверху подводного аппарата, или на его горизонте (справа или слева от подводного аппарата).
3. Невозможность определения направления на обнаруженный морской объект, находящийся сверху подводного аппарата или на его горизонте.
Задача, которая решается изобретением, заключается в разработке способа, свободного от перечисленных выше недостатков.
Технический результат предложенного способа заключается в увеличении дальности действия, возможности обнаружения и определения направления на морской объект, находящийся в любом угловом секторе относительно подводного аппарата.
Поставленная цель достигается тем, что в известном способе обнаружения морских объектов, заключающемся в формировании, усилении и излучении ВЧ сигнала накачки в водную среду на n частотах с помощью n излучателей, расположенных на корпусе носителя и ориентированных в направлении источника НЧ гидроакустических излучений, приеме сигналов комбинационных частот с помощью n приемников, выделении НЧ полезного сигнала из ВЧ сигналов комбинационных частот, сканировании ХН антенны в заданной плоскости, принятии решения об обнаружении сигнала при превышении уровня полезного сигнала над пороговым уровнем, спектральном анализе сигналов, сравнении его с эталонным и принятии решения о количественных и качественных характеристиках источника НЧ гидроакустических излучений. При этом базовая частота ВЧ сигнала накачки соответствует резонансной частоте ППС и излучатели расположены на одинаковом угловом расстоянии на корпусе носителя (подводного аппарата), при этом один из излучателей ориентирован в направлении поверхности моря, один из излучателей - вправо от носителя, один из излучателей - влево от носителя, один из излучателей - в направлении дна моря, а направленность по приему формируется за счет волновых размеров каждого из n приемников и соответствующей ему частоте ВЧ сигнала накачки, определение направления на источник НЧ гидроакустических излучений осуществляется по его максимальному значению путем последовательного подключения к решающему устройству каждого из n приемников.
Увеличение дальности действия способа достигается за счет повышения акустической чувствительности путем увеличения эффективности преобразования акустической энергии ВЧ волн накачки в акустическую энергию ВЧ волн комбинационных частот путем излучения базовой частоты (n=1) ВЧ сигнала накачки на резонансной частоте ППС.
Расширение сектора наблюдения достигается за счет расположения n излучателей на одинаковом угловом расстоянии на корпусе носителя. При этом один из излучателей ориентирован в направлении поверхности моря, один из излучателей - вправо от носителя, один из излучателей - влево от носителя, один из излучателей - в направлении дна моря.
Определение направления на обнаруженный морской объект осуществляется по максимальному значению НЧ полезного сигнала путем последовательно подключения к решающему устройству каждого из n приемников. При этом направленность по приему формируется за счет волновых размеров каждого из n приемников и соответствующей ему частоте ВЧ сигнала накачки.
Отличительными от прототипа признаками заявляемого способа являются следующие.
1. Базовая частота ВЧ сигнала накачки соответствует резонансной частоте приповерхностного пузырькового слоя.
2. N излучателей расположены на одинаковом угловом расстоянии на корпусе носителя, при этом один из излучателей ориентирован в направлении поверхности моря, один из излучателей - вправо от носителя, один из излучателей - влево от носителя, один из излучателей - в направлении дна моря.
3. Направленность по приему формируется за счет волновых размеров каждого из n приемников и соответствующей ему частоте ВЧ сигнала накачки.
4. Определение направления на источник НЧ гидроакустических излучений осуществляется по его максимальному значению путем последовательного подключения к решающему устройству каждого из n приемников.
Наличие отличительных от прототипа признаков позволяет сделать вывод о соответствии заявляемого способа критерию "новизна".
Анализ известных технических решений с целью обнаружения в них указанных отличительных признаков, показал следующее.
Признак 1 является новым и неизвестно его использование для обнаружения морских объектов при плавании и всплытии подводного аппарата на поверхность моря, В то же время из теории нелинейной гидроакустики известно, что использование неоднородностей морской среды (различных фазовых включений) приводит к повышению эффективности взаимодействия акустических волн.
Признак 2 является новым и неизвестно его использование в нелинейной гидроакустике при формировании параметрической приемной антенной решетки (ГШАР). В то же время в гидроакустике данный признак используется в антенной технике.
Признак 3 является новым и неизвестно его использование для обнаружения морских объектов и определения направления на них. В то же время данный признак широко используется в нелинейной гидроакустике.
Признак 4 является новым и неизвестно его использование для определения направления на морские цели при плавании подводного аппарата. В то же время данный признак широко используется в гидроакустике.
Таким образом, наличие новых существенных признаков, в совокупности с известными, обеспечивает появление у заявляемого решения нового свойства, не совпадающего со свойствами известных технических решений - обнаруживать на большом расстоянии от подводного аппарата морские объекты, находящиеся в неограниченном секторе наблюдения и определять на них направления относительно простым способом.
В данном случае мы имеем новую совокупность признаков и их новую взаимосвязь, причем не простое объединение новых признаков и уже известных в гидроакустике, а именно выполнение операций в предложенной последовательности и приводит к качественно новому эффекту.
Данное обстоятельство позволяет сделать вывод о соответствии разработанного способа критерию "существенные отличия".
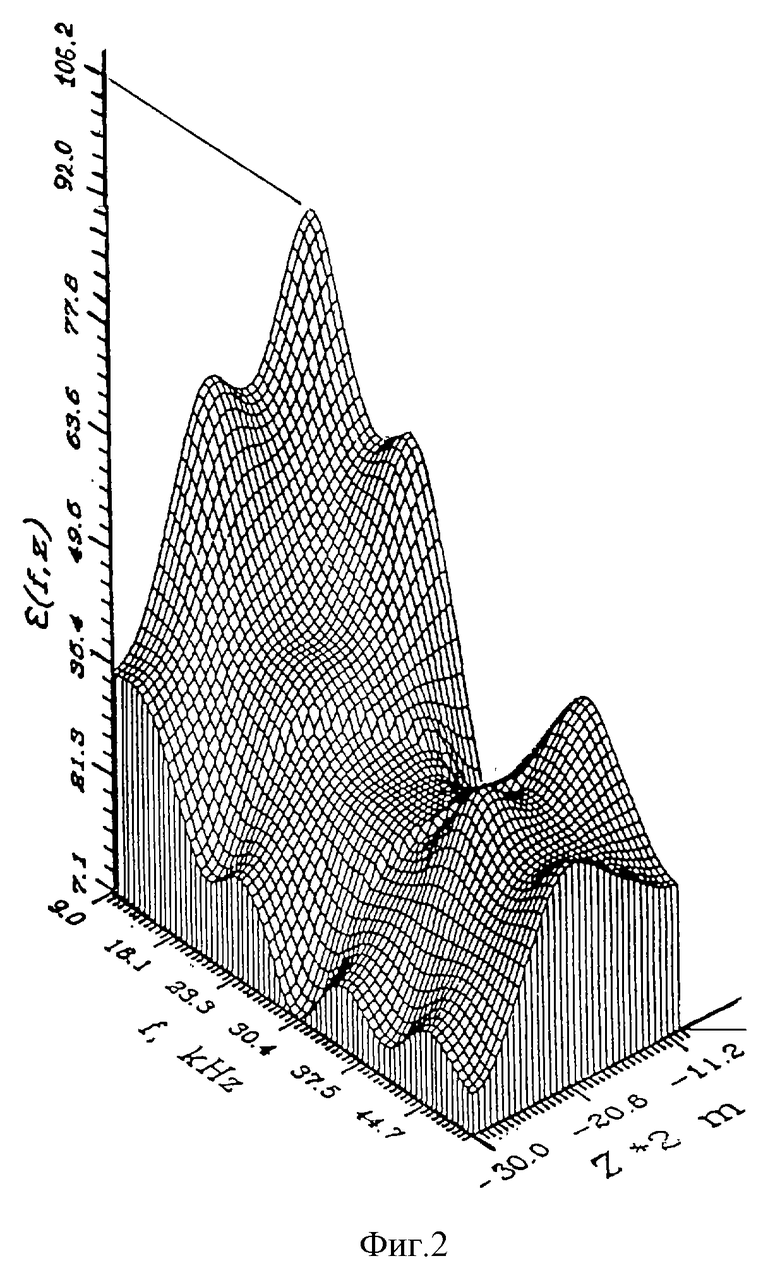
На фиг. 1 представлена структурная схема устройства, с помощью которого реализуется способ обнаружения морских объектов при плавании подводного аппарата.
Устройство содержит n излучателей (1-4) и n приемников (5-8), расположенных на одинаковом угловом расстоянии на корпусе подводного аппарата (9) и ориентированных определенным образом в пространстве (излучатель 1 - в сторону поверхности моря, излучатель 2 - вправо от аппарата, излучатель 3 - влево от аппарата, излучатель 4 - в направлении дна моря). Излучатель ВЧ сигнала накачки и соответствующий ему приемный элемент объединены в одну акустическую систему (1-5, 2-6, 3-7 и 4-8). Вход каждого излучателя подключен к выходу соответствующего блока формирования и усиления излучаемого ВЧ сигнала накачки (10-13), а выход приемного элемента ко входу соответствующего блока усиления и обработки принятого ВЧ сигнала комбинационных частот (14-17). С выходов блоков усиления и обработки принятого ВЧ сигнала комбинационных частот НЧ (14-17) полезный сигнал поступает на соответствующий вход решающего устройства (18). С выхода решающего устройства 18 НЧ полезный сигнал поступает на вход анализатора спектров сигналов (19).
Устройство функционирует следующим образом.
В блоках (10-14) производится формирование и усиление ВЧ сигналов накачки на частотах ω1, ω2, ω3 и ω4, а с помощью соответствующих излучателей (5-8) их излучение в нелинейную водную среду. При этом базовая частота (n=1) ВЧ сигнала накачки соответствует резонансной частоте приповерхностного пузырькового слоя (ППС). Рассеиваясь на неоднородностях водной среды (поверхность моря и ППС, биологические неоднородности в толще воды и в придонном слое воды, а также дно моря), ВЧ сигнал накачки на частотах ω1, ω2, ω3 и ω4, будучи промодулированным НЧ полезным (шумы морских объектов) сигналом на частоте Ω, принимается с помощью n приемников (5-8), расположенных определенным образом на корпусе подводного носителя. При этом с помощью приемника (5) принимается отраженный от поверхности моря и ППС, а также промодулированный НЧ сигналом, ВЧ сигнал на частоте ω1±Ω. С помощью приемника (6) принимается отраженный от биологических неоднородностей, находящихся в толще воды справа от подводною аппарата и промодулированный НЧ сигналом, ВЧ сигнал на частоте ω2±Ω. С помощью приемника (7) принимается отраженный от биологических неоднородностей, находящихся в толще воды слева от подводного аппарата и промодулированный НЧ сигналом, ВЧ сигнал на частоте ω3±Ω. С помощью приемника (8) принимается отраженный от биологических неоднородностей, находящихся в придонном слое воды, а также дном моря и промодулированный НЧ сигналом, ВЧ сигнал на частоте ω4±Ω.
В соответствующих блоках усиления и обработки принятого ВЧ сигнала комбинационных частот (14-17) осуществляется выделение НЧ полезного сигнала из ВЧ сигналов комбинационных частот методом демодуляции. Далее НЧ сигнал с выходов блоков (14-17) поступает на соответствующий вход решающего устройства (18), в котором выделяются информативные признаки о морских целях, содержащихся в НЧ полезном сигнале и осуществляется сканирование ХН антенны в заданной плоскости. При этом определение направления на источник НЧ гидроакустических излучений осуществляется по его максимальному значению путем подключения к решающему устройству (18) каждого из приемников (5-8). С выхода решающего устройства (18) НЧ сигнал поступает на вход анализатора спектров (19). Производя спектральный анализ принятого НЧ полезного сигнала и сравнивая его с эталонным сигналом, принимают решение о количественных и качественных характеристиках источника НЧ гидроакустических излучений.
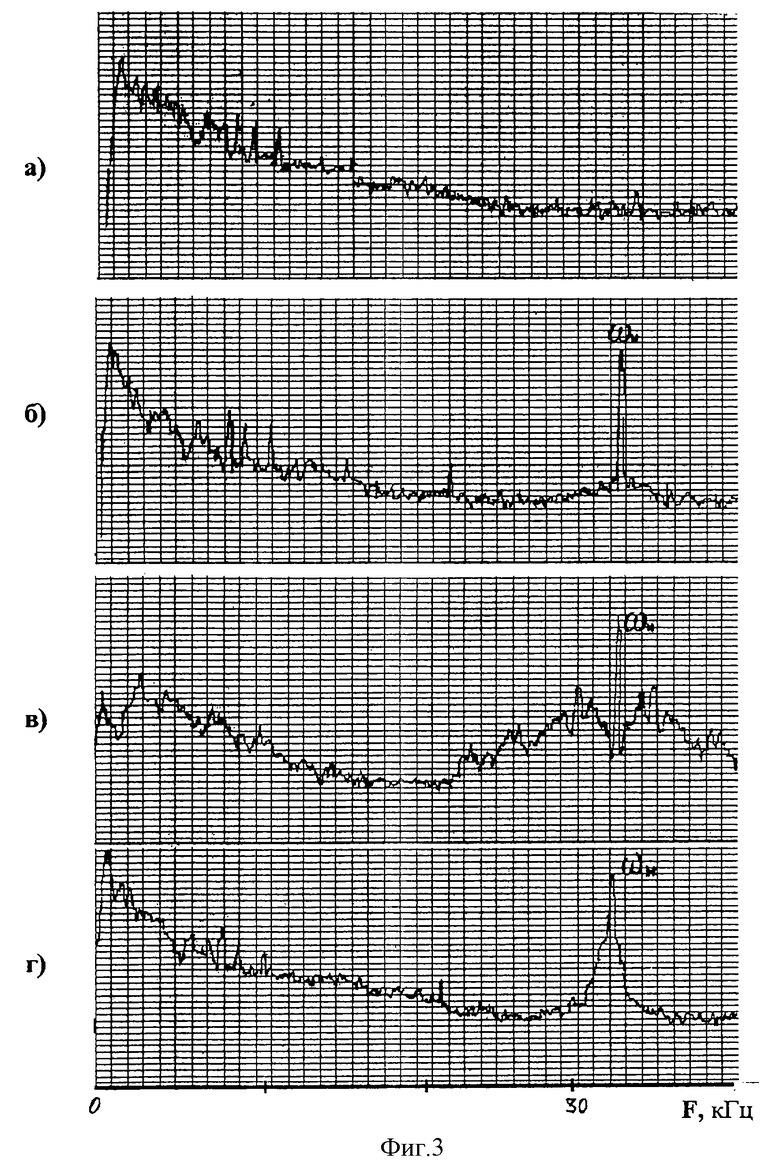
Для примера на фиг. 2 представлена графическая зависимость параметра нелинейности морской воды ε в зависимости от частоты ВЧ сигнала f и глубины расположения акустической системы: ВЧ излучатель - ВЧ приемник Z для одного из районов проведения экспериментальных исследований /4/. Как видно из фиг.2 в приповерхностном пузырьковом слое максимальные значения параметра нелинейности морской среды (ε~ 106), характеризующего эффективность взаимодействия акустических волн (в конечном случае дальность действия способа), регистрируются на частоте f~33 кГц. Данная частота была выбрана в качестве базовой (n=1) частоты ВЧ сигнала накачки. Анализируя данные, представленные на фиг.2, можно заметить, что при правильном выборе частоты ВЧ сигнала накачки значения параметра нелинейности морской воды отличаются практически на два порядка от своих средних значений. Данное обстоятельство приводит к увеличению (приблизительно на эту же величину) амплитуды звукового давления волн комбинационных частот, что влечет, в конечном итоге, существенное увеличение дальности действия способа.
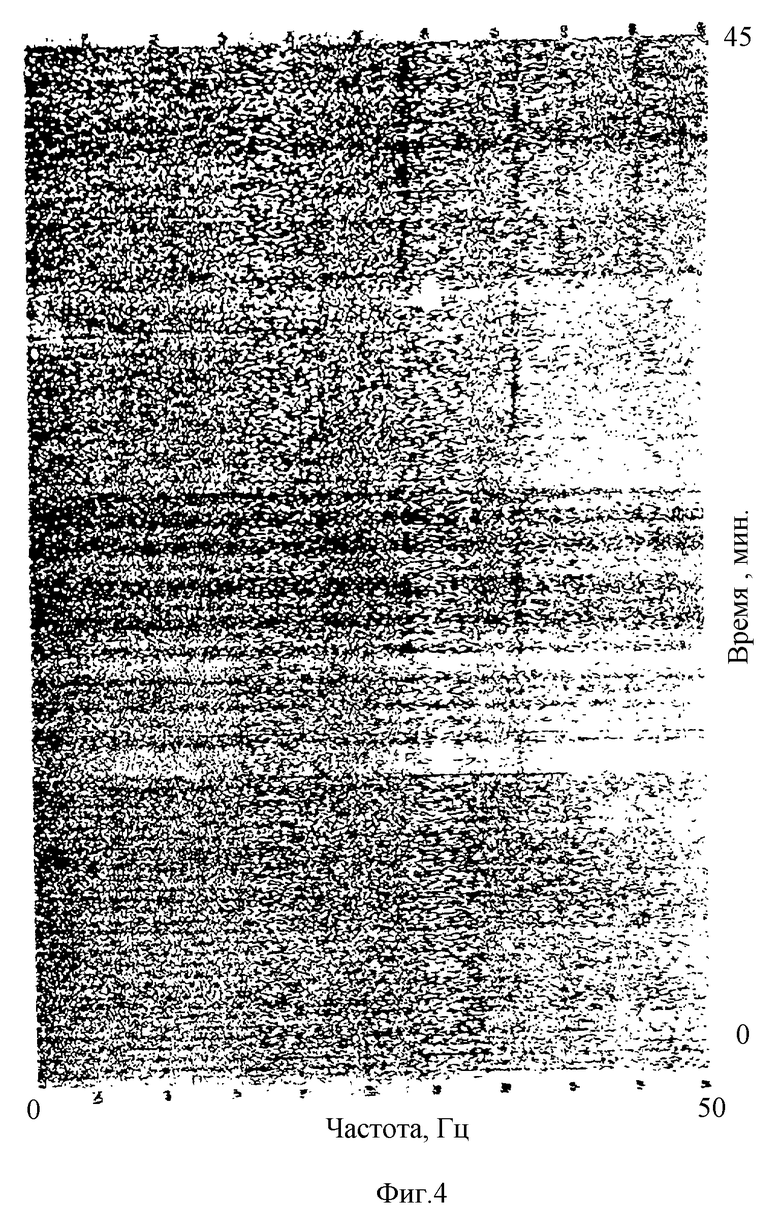
На фиг.3, а представлена спектрограмма шумов моря в диапазоне частот до 40 кГц, а на фиг.3, б-г - спектрограммы сигналов в указанном выше диапазоне частот, зарегистрированные на выходе приемного элемента устройства в различное время. При этом в качестве приемного элемента использовался приемник устройства, ориентированный в сторону поверхности моря, базовая частота ВЧ сигнала накачки составляла 33 кГц, источником НЧ гидроакустических излучений являлись надводная цель - рыболовный сейнер (фиг.3, в) и подводная цель - подводный аппарат (фиг.3, г).
Как видно из фиг.3, г в спектре шумоизлучений подводного аппарата преобладают НЧ составляющие в сплошной и дискретной частях спектра, которые образуют "пьедестал" в области ВЧ рассеянного сигнала накачки. При этом в случае отсутствия НЧ шумоизлучений от морского объекта модуляционных составляющих в области ВЧ сигнала накачки не регистрируется (фиг.3, б). В тоже время в спекторе шумоизлучений рыболовного сейнера (фиг.3, в) преобладают ВЧ составляющие в сплошной и дискретной частях спектра, которые образуют симметричные (относительно рассеянного ВЧ сигнала накачки) "полочки". Поэтому первичная классификация морских объектов по форме спектра ВЧ сигналов комбинационных частот существенно повышает оперативность и достоверность распознавания морских целей.
На фиг.4 представлена сонограмма шумоизлучений подводного аппарата, зарегистрированная на выходе блока усиления и обработки сигналов, подключенного к выходу приемника, ориентированного в сторону поверхности моря. При этом частота ВЧ сигнала накачки составляла 33 кГц. Как видно из фиг.4 в диапазоне частот до 50 Гц зарегистрированы дискретные составляющие, в том числе и в диапазоне частот ниже 35 Гц.
При реализации данного способа обнаружения морских объектов в решающем устройстве (электронная вычислительная машина) хранится (и, по возможности, постоянно пополняется) информация (базы данных) об особенностях шумов и сигналов морских объектов, а также вся другая сопутствующая информация.
При проведении испытаний использовался макет параметрической приемной антенной решетки, состоящей из четырех пар ВЧ акустических преобразователей с базовой частотой 33 кГц, соответствующей резонансной частоте ППС. Макет, реализующий разработанный способ, обеспечил выигрыш в соотношении сигнал/помеха 6...8 дБ по каждому каналу обработки сигналов по сравнению с макетом, реализующим способ-прототип.
Увеличение дальности действия способа по сравнению со способом-прототипом достигается за счет повышения эффективности преобразования акустической энергии ВЧ волн накачки в акустическую энергию ВЧ волн комбинационных частот путем излучения базовой частоты (n=1) на резонансной частоте ППС, а также за счет использования информации о параметрах НЧ гидроакустических излучений в диапазоне частот ниже 35 Гц (НЗД и ИЗД частот).
Расширение сектора наблюдения достигалось за счет расположения на корпусе носителя на одинаковом угловом расстоянии (через 90 градусов) 4-х излучателей и 4-х приемников, объединенных попарно в акустические системы.
Направленность по приему формировалась за счет волновых размеров каждого из 4-х приемников и соответствующих им ВЧ частот накачки. При этом характеристики направленности 4-х приемников перекрывали друг друга на уровне - 3 дБ.
Определение направления на источник НЧ гидроакустических излучений осуществлялось по его максимальному значению путем последовательного подключения к решающему устройству каждого из 4-х приемников.
Литература
1. Роберт Дж. Урик. Основы гидроакустики. - Л.: Судостроение, 1978, 445 с.
2. Патент США 3882444, кл. G 01 S 9/66, 1975.
3. Патент РФ 2096808, кл. G 01 S 15/04, 1995.
4. Бахарев С. А. и др. Исследования влияния гидрофизических параметров морской среды на акустическое поле в морской шельфовой зоне. Отчет о НИР "Акватория". - Минрыбхоз. - Владивосток." Дальрыбвтуз, 1998, 167 с.
Изобретение относится к гидроакустике и может быть использовано в подводных аппаратах для обеспечения навигационной безопасности их мореплавания. В заявленном способе с помощью n излучателей, расположенных на одинаковом угловом расстоянии на корпусе подводного аппарата и ориентированных определенным образом в пространстве, излучается ВЧ сигнал накачки на n частотах в водную среду, при этом базовая частота ВЧ сигнала накачки соответствует резонансной частоте приповерхностного пузырькового слоя, затем этот сигнал, будучи промодулированным по амплитуде НЧ полезным сигналом, принимается с помощью n приемников, расположенных определенным образом на корпусе подводного носителя, при этом направленность по приему формируется за счет волновых размеров каждого из n приемников и соответствующей ему частоте ВЧ сигнала накачки, из него выделяется НЧ полезный сигнал, а определение направления на источник НЧ гидроакустических излучений осуществляется по максимальному значению полезного НЧ сигнала путем последовательного подключения к решающему устройству каждого из n приемников. Достигаемым техническим результатом изобретения является увеличение дальности действия, сектора наблюдения и возможность определения направления на обнаруженный морской объект, находящийся сверху подводного аппарата или на его горизонте. 4 ил.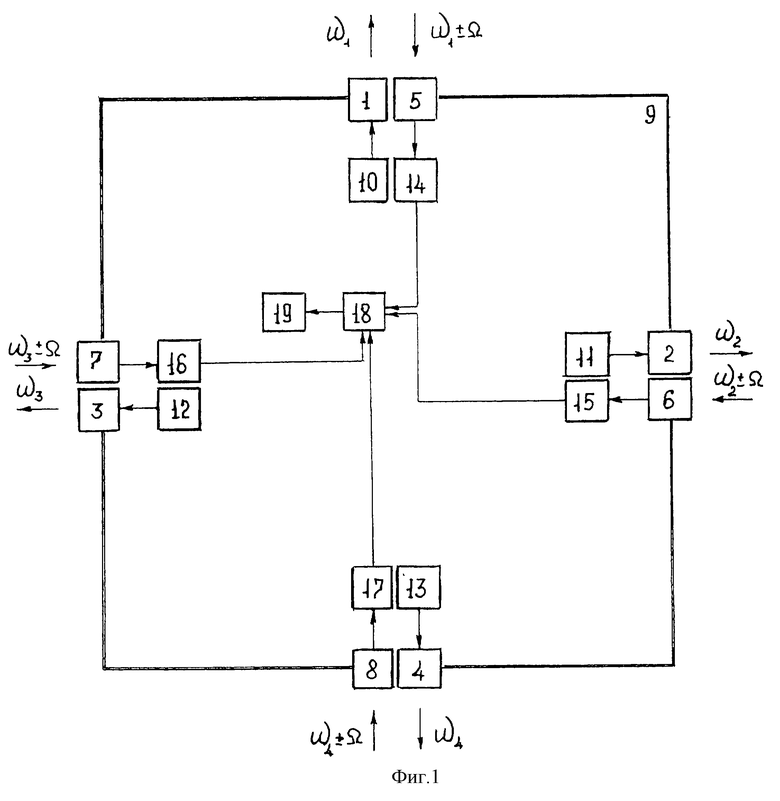
Способ обнаружения морских объектов при всплытии подводного аппарата заключающийся в формировании, усилении и излучении высокочастотного сигнала накачки в водную среду на n частотах с помощью n излучателей, расположенных на корпусе носителя, приеме сигналов комбинационных частот с помощью n приемников, при этом приемники и излучатели объединены попарно в акустические системы усиления высокочастотных сигналов комбинационных частот, выделении полезного низкочастотного сигнала из высокочастотных сигналов комбинационных частот, принятии решения об обнаружении полезного низкочастотного сигнала при превышении его уровня над пороговым уровнем, спектральном анализе полезного низкочастотного сигнала, сравнении полезного низкочастотного сигнала с эталонным сигналом, принятии решения о характеристиках источника низкочастотных гидроакустических излучений и определении направления на источник низкочастотных гидроакустических излучений, отличающийся тем, что базовая частота высокочастотного сигнала накачки соответствует резонансной частоте приповерхностного пузырькового слоя, излучатели и приемники расположены на одинаковом угловом расстоянии на корпусе носителя и ориентированы определенным образом в пространстве, при этом первый излучатель ориентирован в направлении поверхности моря, второй излучатель ориентирован вправо от носителя, третий излучатель ориентирован влево от носителя, четвертый излучатель ориентирован в направлении дна моря, а направленность по приему формируется за счет волновых размеров каждого из n приемников и соответствующей ему частоте высокочастотного сигнала накачки, определение направления на источник низкочастотных гидроакустических излучений осуществляется по максимальному значению полезного низкочастотного сигнала путем последовательного подключения к решающему устройству каждого из n приемников.
| СПОСОБ ОБНАРУЖЕНИЯ НИЗКОЧАСТОТНЫХ ГИДРОАКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ | 1995 |
|
RU2096808C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ НИЗКИХ ЗВУКОВЫХ ГИДРОАКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ МОРСКИХ БИОЛОГИЧЕСКИХ ОБЪЕКТОВ | 1999 |
|
RU2152627C1 |
| US 3870988, 11.03.1975 | |||
| US 3866159, 11.02.1975. | |||

