Данное изобретение относится к подметальному агрегату для установки на несущем транспортном средстве или на прицепе, содержащему несущую раму и по меньшей мере одну установленную в ней с возможностью вращения вокруг своей продольной оси цилиндрическую щетку, приводимую в действие двигателем, причем несущая рама имеет опорные колеса, вертикальное расстояние от которых до оси цилиндрической щетки может изменяться при помощи регулировочного блока, который содержит по меньшей один гидравлический исполнительный цилиндр и управляющее устройство.
Подметальные агрегаты такого типа известны в различных вариантах выполнения, например, из европейского патента 0372258 и заявки Германии 3740215. Известны также подметальные агрегаты, конструкция которых в основном соответствует описанной, но отличается тем, что гидравлический исполнительный цилиндр регулируется не управляющим устройством, а является частью гидравлического контура системы регулирования, и тем, что несущая рама не имеет опорных колес. Подобные подметальные агрегаты описаны, например, в заявках Германии 2455200 и 2821627 и в европейских патентных заявках 0189371 и 0843047.
Для всех подметальных агрегатов, описанных в указанных публикациях, очень большое значение для эффективной и вместе с тем материалосберегающей эксплуатации имеет правильная установка ширины контактной зоны подметания. Как подробно объясняется, например, в европейском патенте 03272258, оптимальной является такая ширина контактной зоны подметания, при которой достигается хорошая чистота подметаемой поверхности при малом износе щетки. Если ширина контактной зоны подметания ниже оптимального значения, то производительность подметания заметно ухудшается. Если же ширина контактной зоны подметания выше оптимального значения, то заметно увеличивается износ щетки без существенного улучшения результата подметания.
Ни в одном из указанных известных подметальных агрегатах ширина контактной зоны подметания не может быть установлена с желательной точностью. Согласно относящимся к данной теме печатным источникам это касается всех известных агрегатов. В этой связи стоит заметить, что для традиционной цилиндрической щетки с диаметром 914 мм перемещение по высоте на 1 мм означает изменение контактной зоны подметания примерно на 60 мм. Из того факта, что подходящая ширина контактной зоны подметания должна составлять от 60 до 100 мм, становится ясным, какие требования к точности регулировочного блока устанавливаются на практике.
В соответствии с указанным недостатком известных устройств, целью настоящего изобретения является создание подметального агрегата традиционного типа, в котором оптимальная контактная зона подметания может быть установлена с высокой точностью.
Согласно изобретению эта задача решена посредством того, что с по меньшей мере одним исполнительным цилиндром гидравлически соединен питающий цилиндр, у которого поршень или другой датчик сигнала соединен со счетным устройством и/или устройством для измерения перемещений, сигнал от которых подается на управляющее устройство, или с механическим сервоприводом, и гидравлическая рабочая полость которого, сообщающаяся с по меньшей мере одним исполнительным цилиндром, имеет меньшую площадь поперечного сечения, чем по меньшей мере один исполнительный цилиндр.
Питающий цилиндр служит для объемного дозирования гидравлической жидкости к по меньшей мере одному исполнительному цилиндру в соответствии с его перемещением из базового положения в рабочее положение, соответствующее оптимальной ширине контактной зоны подметания. Базовое положение может соответствовать различным характерным положениям цилиндрической щетки относительно очищаемой поверхности, с учетом которых управляющее устройство вычисляет перемещение по меньшей мере одного исполнительного цилиндра, которое требуется для перевода цилиндрической щетки в ее рабочее положение, характеризующееся оптимальной шириной контактной зоны подметания. Особенно предпочтительно в качестве базового положения принять положение контакта цилиндрической щетки с землей и соответствующее положение по меньшей мере одного исполнительного цилиндра, поскольку в этом случае автоматически учитывается износ щетки. При этом особенно предпочтительно наличие обходного, по отношению к питающему цилиндру, трубопровода, так как питающий цилиндр нужен только для точного опускания цилиндрической щетки из положения контакта с землей в рабочее положение. Ни при опускании цилиндрической щетки в ее положение контакта с землей, ни при поднятии цилиндрической щетки объемное дозирование подводимой к исполнительному цилиндру или отводимой от него гидравлической жидкости не требуется. Описанная выше конструкция гидравлической установки с питающим цилиндром позволяет особенно точно регулировать работу по меньшей мере одного исполнительного цилиндра.
В рамках изобретения возможно, что на поршень питающего цилиндра действует механический сервопривод, так что питающий цилиндр выполняет функцию насоса. Однако особенно предпочтительно включение питающего цилиндра между гидравлическим насосом и по меньшей мере одним исполнительный цилиндром. В этом случае он работает вместе с ними, причем объем подводимой к по меньшей мере одному исполнительному цилиндру гидравлической жидкости определяется числом рабочих ходов питающего цилиндра и/или - при неполных рабочих ходах - ходом поршня питающего цилиндра.
Согласно другому предпочтительному варианту изобретения предусмотрен датчик, который реагирует на приводной момент или приводную мощность цилиндрической щетки или на связанную с ними величину и сигнал которого подается на управляющее устройство, причем управляющее устройство определяет рабочее положение исполнительного органа, соответствующее оптимальной ширине контактной зоны подметания, как функцию его положения при контакте с землей, характеризующегося резким возрастанием сигнала датчика при опускании цилиндрической щетки.
В этом варианте выполнения подметального агрегата при определении положения цилиндрической щетки относительно очищаемой поверхности автоматически учитывается фактический диаметр цилиндрической щетки, зависящий от ее износа, благодаря тому, что положение контакта щетки с землей и соответствующее положение исполнительного органа используются в качестве исходного значения для определения рабочего положения исполнительного органа, соответствующего оптимальной ширине контактной зоны подметания. Контакт цилиндрической щетки с землей при ее опусканиии определяется по резкому возрастанию сигнала датчика, который реагирует на приводной момент или приводную мощность цилиндрической щетки или на связанную с ними величину.
Проблемы, которые присущи известным подметальным агрегатам, для предлагаемого подметального агрегата не возникают. В отличие от DE-OS 2455200 и 2821627 и ЕР-А 0189371 и 0843047 устанавливаемая управляющим устройством ширина контактной зоны подметания не зависит от характера подметаемой поверхности, в частности от ее шероховатости. Кроме того, в отличие от ЕР-В 0372258 и DE-OS 3740215 не требуются измерительные датчики сложной, подверженной поломкам конструкции. Несмотря на это, при установке ширины контактной зоны подметания за основу берется не средний износ цилиндрической щетки, зависящий от того, сколько времени она работала, а фактический износ. Благодаря этому оптимальная ширина контактной зоны подметания в подметальном агрегате может быть автоматически точно установлена при минимальных затратах на оборудование, и, кроме того, подметальный агрегат отличается надежной, не подверженной поломкам конструкцией.
Целесообразно, чтобы управляющее устройство определяло рабочее положение исполнительного органа от его положения при контакте с землей или другого базового положения путем прибавления постоянной величины. Другими словами, в этом случае цилиндрическая щетка при работе опускается все время в одно положение, которое на определенную величину (например, 2 мм) ниже положения контакта с землей. Правда, вследствие изменения геометрических параметров при увеличении износа цилиндрической щетки это может привести к постепенному уменьшению ширины контактной зоны подметания, но это можно скомпенсировать, по меньшей мере частично, путем увеличения жесткости щетки, так что подметание дает, по существу, такой же результат.
В противоположность этому, другой предпочтительный вариант изобретения отличается тем, что движение исполнительного органа, в результате которого его рабочее положение будет отличаться от его положения контакта с землей, зависит от фактического диаметра цилиндрической щетки. В этом случае управляющее устройство содержит соответствующую схему компенсации, например, с использованием кривой характеристики, которая задает движение подачи, т.е. разность между рабочим положением исполнительного органа и его положением при контакте с землей, в зависимости от фактического диаметра цилиндрической щетки. Последний может быть непосредственно определен из положения исполнительного органа при контакте с землей, поскольку при установленных на очищаемую поверхность опорных колесах каждому диаметру цилиндрической щетки точно соответствует положение исполнительного органа при контакте с землей. Могут также применяться другие подходящие измерительные устройства для определения диаметра цилиндрической щетки, которые тоже используют положение цилиндрической щетки относительно несущей рамы в положении контакта щетки с землей. К ним относится, в частности, угломер, который определяет угловое положение по меньшей мере одного несущего рычага цилиндрической щетки относительно других деталей несущей рамы.
Важным является то, что в каждом случае диаметр цилиндрической щетки не измеряется датчиками непосредственно, а определяется из положения цилиндрической щетки в момент ее контакта с землей посредством использования сигнала датчика контакта с землей.
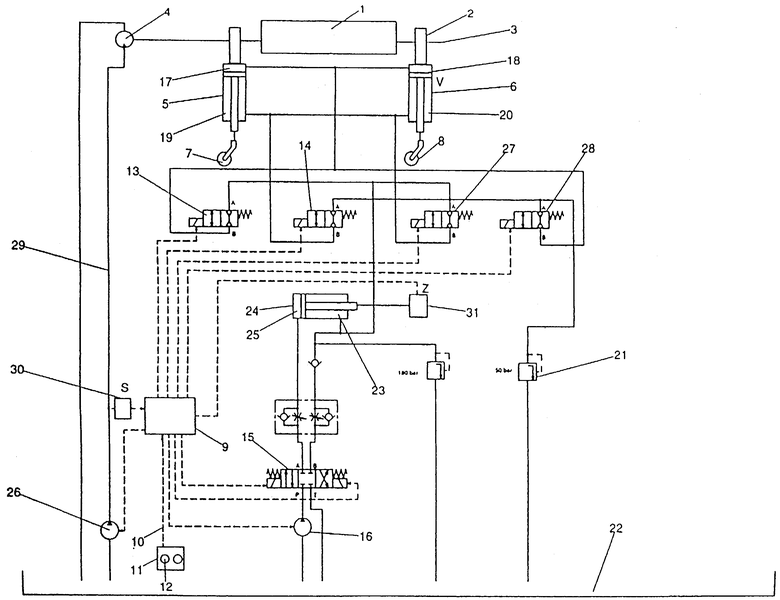
Ниже изобретение описывается более подробно со ссылками на чертеж, на котором изображена гидравлическая схема предпочтительного варианта выполнения подметального агрегата согласно изобретению.
Показанный на чертеже подметальный агрегат содержит цилиндрическую щетку 1, установленную внутри несущей рамы 2 с возможностью вращения вокруг своей оси 3 и приводимую в действие гидродвигателем 4. Несущая рама 2 содержит два исполнительных гидроцилиндра 5, 6, образующих исполнительные органы V, причем поршневой шток каждого гидроцилиндра соединен с соответствующим опорным колесом 7 или 8. Конструкция, представленная на чертеже лишь схематично, такова, что при помощи исполнительных цилиндров 5 и 6 может изменяться вертикальное расстояние между опорными колесами 7, 8 и осью 3 цилиндрической щетки 1. Подобные конструкции известны и не нуждаются в более подробном описании.
Собственно подметальный агрегат подвешен на несущем транспортном средстве при помощи несущей конструкции (не показана). Несущая конструкция осуществляет подъем подметального агрегата в транспортировочное положение и опускание его в рабочее положение, в котором опорные колеса 7 и 8 катятся по очищаемой поверхности. Это тоже относится к известным устройствам и не требует пояснений.
Работой подметального агрегата управляет управляющее устройство 9, соединенное через управляющий трубопровод 10 с пультом 11 управления. При пуске подметального агрегата соответствующим переключателем 12 на пульте 11 управления в гидравлической системе, управляемой управляющим устройством 9, осуществляются следующие операции.
Вентили 13 и 14 переключаются из закрытого положения в открытое положение, управляющий вентиль 15 переключается из закрытого положения в перекрестное положение, в котором он соединяет между собой подводы Р и В с одной стороны и подводы А и Т с другой стороны, и запускается насос 16. Гидравлические рабочие полости 17, 18 исполнительных цилиндров 5 и 6 заполняются гидравлической жидкостью, и их поршневые штоки выдвигаются в крайнее положение с вытеснением гидравлической жидкости, находящейся в гидравлических рабочих полостях 19 и 20, через вентиль 14 и клапан 21 противодавления в отстойник 22. Одновременно заполняется гидравлическая рабочая полость 23 питающего цилиндра 24, вследствие чего его поршень переводится в левое крайнее положение с вытеснением гидравлической жидкости, находящейся в гидравлической рабочей полости 25, через управляющий вентиль 15 в отстойник 22. Затем вентили 13 и 14 переводятся в закрытое положение и подметальный агрегат при помощи несущего устройства (не показано) опускается до тех пор, пока опорные колеса 7 и 8 не установятся на очищаемую поверхность. После этого несущее устройство переводится в плавающее положение, чтобы подметальный агрегат мог подниматься и опускаться из-за неровностей земли.
Затем включается гидронасос 26, приводящий в действие гидродвигатель 4, и цилиндрическая щетка 1 начинает вращаться.
Вентили 27 и 28 переключаются в открытое положение, благодаря чему гидравлическая жидкость через насос 16 и включенный, как и до этого, в перекрестное положение управляющий вентиль 15 поступает в гидравлические рабочие полости 19 и 20 исполнительных цилиндров 5 и 6. Их поршневые штоки медленно вдвигаются, и гидравлическая жидкость, находящаяся в гидравлических рабочих полостях 17 и 18, через (открытый) вентиль 28 и клапан 21 противодавления вытесняется в отстойник 22. Это приводит к постепенному опусканию цилиндрической щетки 1 в направлении к очищаемой поверхности.
Как только цилиндрическая щетка 1 при опускании входит в контакт с очищаемой поверхностью и тормозится в результате превышения тормозного момента холостого хода, давление в напорном трубопроводе 29, соединяющем гидронасос 26 и гидродвигатель 4, резко возрастает. Это возрастание давления регистрируется датчиком S, выполненным в виде датчика 30 давления, который подает соответствующий сигнал на управляющее устройство 9. Управляющее устройство в ответ на это переключает управляющий вентиль 15 из перекрестного положения в параллельное открытое положение, в котором он соединяет между собой подводы А и Р с одной стороны и подводы В и Т с другой стороны. Вследствие этого нагружается гидравлическая рабочая полость 25 питающего цилиндра 24, и гидравлическая жидкость, находящаяся в гидравлической рабочей полости 23, вытесняется через открытый вентиль 27 в гидравлические рабочие полости 19 и 20 исполнительных цилиндров 5 и 6. Предварительно заданный объем гидравлической рабочей полости 23 питающего цилиндра 24 обусловливает точно определенное укорочение исполнительных цилиндров 5 и 6 и тем самым точно определенное опускание цилиндрической щетки 1.
Если оптимальная ширина контактной зоны подметания еще не достигнута, то оба вентиля 27 и 28 закрываются, а управляющий вентиль 15 переводится в перекрестное положение. Вследствие этого гидравлическая рабочая полость 23 питающего цилиндра 24 снова заполняется гидравлической жидкостью и повторяется описанный выше процесс - открывание вентилей 27 и 28 и перестановка управляющего вентиля 15 в параллельное открытое положение.
Число рабочих ходов питающего цилиндра 24, которые требуются для того, чтобы перевести цилиндрическую щетку 1 из ее положения контакта с землей в рабочее положение, определяется по гидравлическому передаточному отношению между питающим цилиндром 24 и исполнительными цилиндрами 5 и 6. Чем больше передаточное отношение, тем точнее может быть установлено положение цилиндрической щетки 1 относительно очищаемой поверхности. Поршневой шток питающего цилиндра 24 действует на счетное устройство Z, выполненное в виде счетчика 31 импульсов, которое соединено с управляющим устройством 9. Если число рабочих ходов, определенное счетчиком 31 импульсов, соответствует значению, заданному управляющим устройством 9, то все вентили 13, 14, 27 и 28, а также управляющий вентиль 15 закрываются и гидравлический насос 16 отключается.
По окончании процесса подметания при помощи соответствующего переключателя на пульте 11 управления гидравлический насос 26 отключается и подметальный агрегат поднимается при помощи несущего устройства (не показано). Поршни исполнительных цилиндров 5 и 6 могут быть выдвинуты, как описано выше, посредством нагружения их гидравлических рабочих полостей 17 и 18. Эта операция может быть соответственно исключена в начале процесса подметания.
Описанный выше процесс (точная регулировка опускания) является обратимым, если вместо вентилей 27 и 28 управляются вентили 13 и 14. В этом случае обеспечивается процесс точной регулировки подъема. Тем самым могут простым образом компенсироваться внешние возмущающие воздействия, которые изменяются не слишком быстро. Например, плуг своим весом очень сильно влияет на геометрию рамы транспортного средства относительно дороги и, соответственно, на контактную зону подметания.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДМЕТАЛЬНЫЙ АГРЕГАТ | 2000 |
|
RU2241091C2 |
| ПОДМЕТАЛЬНАЯ МАШИНА ДЛЯ ПРОЕЗЖЕЙ ЧАСТИ С НЕСКОЛЬКИМИ РЕЖИМАМИ ПОДМЕТАНИЯ | 2018 |
|
RU2721270C1 |
| Подметальный агрегат и щеточное устройство коммунальной дорожной машины | 2018 |
|
RU2683542C1 |
| ПОДМЕТАЛЬНЫЙ АГРЕГАТ | 1992 |
|
RU2077862C1 |
| ПОДМЕТАЛЬНО-УБОРОЧНАЯ МАШИНА | 1996 |
|
RU2138594C1 |
| НЕСУЩЕЕ УСТРОЙСТВО ДЛЯ ПОДВЕШИВАНИЯ ЦИЛИНДРИЧЕСКОЙ ЩЕТКИ НА ПОДМЕТАЛЬНО-УБОРОЧНОЙ МАШИНЕ | 2005 |
|
RU2376414C2 |
| Подметально-уборочная машина | 2021 |
|
RU2765998C1 |
| Подметально-уборочная машина | 1981 |
|
SU1040030A1 |
| ПОДМЕТАЛЬНО-УБОРОЧНЫЙ РАБОЧИЙ ОРГАН | 1996 |
|
RU2143026C1 |
| Рабочее оборудование подметально-уборочной машины | 1984 |
|
SU1142569A1 |
Изобретение относится к уборочной технике, в частности к подметальным агрегатам, устанавливаемым на транспортном средстве или на прицепе. Устройство содержит несущую раму (2) и установленную в ней с возможностью вращения вокруг своей продольной оси (3) цилиндрическую щетку (1), приводимую в действие двигателем. Несущая рама (2) имеет опорные колеса (7, 8), вертикальное расстояние от которых до оси (3) цилиндрической щетки (1) может изменяться при помощи регулировочного блока, содержащего гидравлический исполнительный цилиндр (5, 6) и управляющее устройство (9). С исполнительным цилиндром (5, 6) гидравлически соединен питающий цилиндр (24), у которого поршень или другой датчик сигнала соединен со счетным устройством и/или устройством (Z) для измерения перемещений, сигнал от которых подается на управляющее устройство (9), или с механическим сервоприводом, и гидравлическая рабочая полость (23) которого, сообщающаяся с исполнительным цилиндром, имеет меньшую площадь поперечного сечения, чем исполнительный цилиндр (5, 6). Технический результат заключается в высокоточной установке контактной зоны подметания. 5 з.п. ф-лы, 1 ил.
| Подвеска рабочего органа подметально-уборочной машины | 1989 |
|
SU1751252A2 |
| Лотковая щетка | 1981 |
|
SU1020486A1 |
| РАБОЧИЙ ОРГАН МАШИНЫ ДЛЯ ЗАЧИСТКИ ПОВЕРХНОСТИ | 0 |
|
SU293907A1 |
| СПОСОБ КРЕПЛЕНИЯ НЕНЕСУЩИХ СТЕНОВЫХ ЖЕЛЕЗОБЕТОННЫХ ПАНЕЛЕЙ К КОНСТРУКЦИЯМ ЗДАНИЯ И УСТРОЙСТВО УЗЛА КРЕПЛЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2821627C1 |
| СИСТЕМА КОНДИЦИОНИРОВАНИЯ ВОЗДУХА С ЗАЩИТОЙ ОТ ОБЛЕДЕНЕНИЯ ДЛЯ ВОЗДУШНОГО СУДНА | 2007 |
|
RU2455200C2 |
| DE 3740215 A1, 16.06.1988 | |||
| ВСЕСОЮЗНАЯ | 0 |
|
SU372258A1 |
| Логопериодическая антенна | 1979 |
|
SU843047A1 |
| US 4525888, 02.07.1985. | |||

