Область техники, к которой относится изобретение
Настоящее изобретение относится к измерению параметров текучей среды в трубах и, в частности, к измерению скорости звука и связанных с ней параметров текучих сред в трубах с использованием акустических давлений.
Уровень техники
Настоящая заявка является частичным продолжением находящейся в процессе одновременного рассмотрения патентной заявки США того же автора, серийный №09/105, 534, под названием "Измерение параметров текучих сред в трубах с использованием акустических давлений", поданной 26 июня 1998 г., и содержит предмет изобретения, относящийся к предмету изобретения, раскрытому в находящихся в процессе одновременного рассмотрения патентных заявок США того же автора: серийный № (рег. № CiDRA CC-0187) под названием "Измерение распространяющихся акустических волн в эластичных трубах", поданной одновременно с настоящей заявкой, серийный № (рег. № CiDRA CC-0194) под названием "Датчик давления на смещении, измеряющий нестабильное давление в трубе", и серийный № (рег. №CiDRA CC-0102A) под названием "Неинтрузивный оптоволоконный датчик давления для измерения нестабильных давлений в трубе", поданной одновременно с настоящей заявкой. Все эти заявки включены в настоящее описание путем ссылки.
Известно, что скорость аmix звука в текучих средах в трубах может быть использована для определения различных параметров текучей среды, как, например, описано в патенте США №4 080 837 под названием "Звуковые измерения скорости потока и содержания воды в нефтеводяных потоках", выданном Александеру и др., в патенте США №5 115 670 под названием "Измерение параметров текучей среды в двухфазных текучих средах с использованием ультразвукового измерителя", выданном Шену, и патенте США №4 114 439 под названием "Устройство для ультразвукового измерения физических параметров текучей среды", выданном Фику. В таком методе используется пара акустических передатчиков/приемников (приемопередатчиков), которые генерируют звуковой сигнал и измеряют время, за которое звуковой сигнал проходит между приемопередатчиками. Этот метод также известен как метод "времени пролета". Этот метод, однако, требует прецизионного управления источником акустического сигнала и дорогой и/или сложной электроники.
Кроме этого, в этих методах в качестве измеряемого звукового сигнала используются ультразвуковые акустические сигналы, которые представляют собой высокочастотные, коротковолновые сигналы (т.е. длина волны мала по сравнению с диаметром трубы). Обычно ультразвуковые устройства работают на частоте около 200 кГц, что соответствует длине волны в воде около 0,3 дюйма (7.62 мм). Вообще, для того чтобы распространение сигнала в текучей среде происходило беспрепятственно и поддавалось интерпретации, текучая среда должна быть однородной с масштабом неоднородности в несколько раз меньше длины волны акустического сигнала. Таким образом, критерии однородности текучей среды становятся тем жестче, чем короче волна сигнала. В соответствии с этим такие неоднородности в текучей среде, как пузырьки, газ, грязь, песок, уплотнения, расслоение, капли жидкости и т.п., будут отражать или рассеивать передаваемый ультразвуковой сигнал. Подобные отражения и рассеяния ухудшают способность прибора определять скорость распространения. Поэтому использование ультразвуковых измерителей скорости потока было ограничено в основном достаточно однородными потоками.
В патенте США №4 896 540 (ближайший аналог изобретения) описаны устройство для измерения параметров текучей среды или смеси текучих сред в трубе, а также соответствующий способ измерения параметров текучих сред. Известное устройство снабжено группой распределенных в пространстве датчиков, содержащей по крайней мере два датчика давления, расположенных в разных осевых положениях вдоль трубы, и процессором сигналов, выполненным с возможностью приема вырабатываемых датчиками сигналов давления, образования сигнала, характеризующего скорость звука, распространяющегося через текучую среду или смесь текучих сред в трубе, с использованием упомянутых сигналов давления и вычисления скорости распространения звука вдоль упомянутых датчиков.
В известном решении используются датчики давления, лишь фиксирующие прохождение звуковой волны и не измеряющие действительного акустического (звукового) давления. Кроме того, для работы известного устройства необходимы средства продувки каналов, соединяющих полость трубы с датчиками, что ведет к существенному усложнению конструкции.
Сущность изобретения
Задачи настоящего изобретения включают создание устройства и способа для измерения скорости звука через текучие среды в трубах, которые позволили бы преодолеть недостатки существующих аналогов.
В соответствии с настоящим изобретением устройство для измерения параметров текучих сред в трубе содержит группу распределенных в пространстве датчиков, содержащую по крайней мере два датчика давления, расположенные в разных осевых положениях вдоль трубы, и процессор сигналов, выполненный с возможностью приема вырабатываемых датчиками сигналов давления, образования сигнала, характеризующего скорость звука, распространяющегося через текучую среду или смесь текучих сред в трубе, с использованием упомянутых сигналов давления и вычисления скорости распространения звука вдоль упомянутых датчиков. Отличие предложенного устройства от вышеуказанного ближайшего аналога состоит в том, что каждый из упомянутых датчиков установлен с возможностью измерения акустического давления внутри трубы в соответствующем осевом положении, а процессор сигналов содержит логическую схему преобразования вырабатываемых датчиками сигналов акустического давления с их представлением в частотной или временной области.
Вырабатываемые датчиками сигналы акустического давления могут характеризовать фоновый акустический шум внутри трубы. Измеряемые параметры текучей среды или смеси текучих сред могут включать в себя один или несколько таких параметров, как содержание определенной фракции в составе текучей среды, температура, засоленность, состав минералов, число Маха и скорость звука в текучей среде или смеси текучих сред. В соответствии с вариантом выполнения настоящего изобретения процессор сигналов вычисляет отношение двух из частотных сигналов (сигналов в частотной области). В варианте выполнения настоящего изобретения в устройстве используется три датчика.
В соответствии с вариантом выполнения настоящего изобретения датчики давления являются оптоволоконными датчиками на основе решеток Брэгга. В соответствии с вариантом выполнения настоящего изобретения по крайней мере один из датчиков давления измеряет усредненное по кругу давление в заданном осевом положении датчика. В соответствии с вариантом выполнения настоящего изобретения по крайней мере один из датчиков давления измеряет давление в более чем одной точке вокруг окружности трубы в заданном осевом положении датчика.
Еще одним объектом изобретения является способ измерения параметров текучей среды или смеси текучих сред в трубе, заключающийся в том, что по крайней мере в двух заданных осевых положениях вдоль трубы получают по крайней мере два соответствующих сигнала давления и затем с использованием упомянутых сигналов давления вычисляют скорость звука, распространяющегося через текучую среду или смесь текучих сред в трубе. Отличие предложенного способа от вышеуказанного ближайшего аналога состоит в том, что сигналы давления получают посредством измерения акустического давления внутри трубы в упомянутых осевых положениях, причем перед вычислением скорости звука осуществляют преобразование сигналов акустического давления путем представления их в частотной или временной области.
Настоящее изобретение обеспечивает значительное усовершенствование по сравнению с уровнем техники благодаря измерению скорости звука amix в смеси одной или более текучих сред внутри трубы (где текучая среда является жидкостью или газом) с использованием осевой решетки измерения акустического (или переменного, динамического, нестабильного или меняющегося во времени) давления вдоль трубы. Специального источника акустического шума не требуется, так как фоновые акустические шумы внутри трубы (или в текучей среде в ней) создадут достаточное возбуждение для определения скорости звука в смеси только за счет пассивного акустического приема.
Основной технический результат, достигаемый изобретением, заключается в упрощении конструкции аппаратуры для измерения параметров текучих сред благодаря применению датчиков, установленных внутри трубы для измерения акустического давления в разных положениях по оси этой трубы, и процессора сигналов, способного преобразовывать вырабатываемые датчиками сигналы акустического давления с представлением последних в частотной или временной области. Сочетание этих признаков позволяет упростить сложную конструкцию, используемую в упомянутом выше ближайшем аналоге, где датчики вынесены за пределы трубы и используется гашение статической составляющей давления.
В изобретении используются акустические сигналы, имеющие более низкие частоты (а значит, и большие длины волн), чем используются в ультразвуковых измерителях, например, ниже приблизительно 20 кГц (в зависимости от диаметра трубы). По этой причине изобретение менее чувствительно к наличию газа, песка, уплотнений и других неоднородностей в потоке.
Изобретение может работать с произвольным размещением датчиков и произвольными значениями числа Маха Мx скорости потока; однако при одинаковом расстоянии между датчиками и малой осевой скорости потока, пренебрежимо малой по сравнению со скоростью звука в смеси (т.е. число Маха Мx смеси мало по сравнению с 1), скорость звука аmix может быть представлена как явная функция сигналов акустического давления в частотной области (сигнал, зависящий от частоты) на заданной частоте измерения ω.
Поскольку скорость звука является внутренним свойством смесей, настоящее изобретение может быть использовано для измерения любого параметра (или характеристики) любой смеси одной или нескольких текучих сред в трубе, для которой этот параметр связан со скоростью звука аmix в смеси, например состава фракций текучей среды, температуры, засоленности, наличия частиц песка, уплотнений, свойств трубы и т.д., или любого другого параметра смеси, который связан со скоростью звука в смеси. Например, настоящее изобретение может быть использовано для измерения объемных фракций текучей среды (или состава, или фракций, или содержания) смеси любого числа текучих сред, в которой скорость звука аmix связана (или существенно определяется) объемными фракциями двух составных частей смеси, например нефть/вода, нефть/газ, вода/газ. Настоящее изобретение может быть также использовано для измерения скорости звука в любой смеси и может быть затем использовано в сочетании с другими известными параметрами для определения фазового состава смесей со многими (более двух) составляющими.
Настоящее изобретение позволяет определять скорость звука в трубе независимо от ориентации трубы, т.е. вертикальной, горизонтальной или любой промежуточной между ними. Кроме этого, изобретение не требует никакого нарушения потока внутри трубы (например, отверстием или трубкой Вентури). Далее, в изобретении используются измерения переменного (или нестабильного, или динамического) давления в противоположность измерениям статического (постоянного) давления, благодаря чему меньше чувствительность к статическим смещениям (ошибкам) измерения. Более того, при использовании выдерживающих жесткие условия окружающей среды оптоволоконных датчиков давления для выполнения измерений давления исключается необходимость применения каких-либо электронных компонентов в скважине, благодаря чему повышается надежность измерения.
Кроме этого, тензодатчик (оптический, электрический и т.д.), которым измеряется круговая деформация на трубе, может быть использован для измерения переменного давления. Обматываемые оптоволоконные датчики могут быть использованы как оптические тензодатчики для определения усредненного по кругу давления. Таким образом, настоящее изобретение позволяет выполнять неинтрузивные измерения скорости звука (и других соответствующих параметров), чем обеспечивается контроль в реальном масштабе времени и оптимизация параметров в разведке и добыче нефти и газа и в других применениях.
Упомянутые и другие задачи, признаки и преимущества настоящего изобретения станут более понятными в свете приведенного ниже подробного описания примеров его выполнения.
Перечень фигур чертежей и иных материалов
На Фиг.1 приведена блок-схема системы измерения параметров текучей среды.
На Фиг.2 приведена зависимость скорости звука в смеси от объемного содержания фракции воды в процентах для смеси нефть/вода.
На Фиг.3 приведена матричная модель передачи акустических колебаний на примере трубы, имеющей 9 секций и импеданс излучения ζrad.
На Фиг.4 графики (а)-(с) представляют зависимость осевых значений свойств смеси ρmix, аmix, hwater для участков трубы, изображенной на Фиг.3.
На Фиг.5 представлена зависимость величины и фазы отношения двух давлений P1/P2 от частоты для импеданса излучения, равного 1,0, 50% водной фракции и осевых свойствах согласно Фиг.4.
На Фиг.6 представлена зависимость величины и фазы отношения двух давлений Р1/Р3 от частоты для импеданса излучения, равного 1,0, 50% водной фракции и осевых свойствах согласно Фиг.4.
На Фиг.7 представлена зависимость оценки величины скорости звука от члена ошибки в диапазоне частот, с использованием частотных характеристик, представленных на Фиг.5, 6.
На Фиг.8 представлена зависимость величины и фазы отношения двух давлений Р1/Р2 от частоты для импеданса излучения, равного 0,5, 50% водной фракции и постоянных осевых свойств смеси.
На Фиг.9 представлена зависимость величины и фазы отношения двух давлений Р1/P3 от частоты для импеданса излучения, равного 0,5, 50% водной фракции и постоянных осевых свойств смеси.
На Фиг.10 представлена зависимость величины и фазы отношения двух давлений Р1/Р2 от частоты для импеданса излучения, равного 0,5, 5% водной фракции и постоянных осевых свойств смеси.
На Фиг.11 представлена зависимость величины и фазы отношения двух давлений P1/Р3 от частоты для импеданса излучения, равного 0,5, 5% водной фракции и постоянных осевых свойств смеси.
На Фиг.12 представлена зависимость оценки величины скорости звука от члена ошибки в диапазоне частот с использованием частотных характеристик для двух различных процентных содержаний фракций воды, согласно Фиг.8-11.
На Фиг.13 представлена контурная диаграмма зависимости скорости звука от осевого числа Маха и от члена ошибки для 5% водной фракции, числа Маха, равного 0,05, на частоте 25 Гц.
На Фиг.14 представлена контурная диаграмма зависимости скорости звука от осевого числа Маха и от члена ошибки для 50% водной фракции, числа Маха, равного 0,05, на частоте 25 Гц.
На Фиг.15 представлена часть логической блок-схемы для реализации системы, показанной на Фиг.1.
На Фиг.16 представлено продолжение логической блок-схемы, показанной на Фиг.15.
На Фиг.17 представлена блок-схема системы измерения параметров текучей среды для применения в нефтяной или газовой скважине, в которой используются оптоволоконные датчики.
На Фиг.18 представлена зависимость скорости звука от толщины стенки трубы для жесткой и нежесткой труб.
На Фиг.19 представлено поперечное сечение трубы, изображающее несколько датчиков по окружности трубы.
На Фиг.20 представлен вид сбоку трубы, имеющей изолирующую муфту вокруг измерительной секции трубы.
На Фиг.21 представлен вид с торца трубы, изображающий давление внутри и снаружи трубы.
На Фиг.22 представлен вид сбоку трубы, где вокруг трубы на каждом участке измерения нестабильного давления обмотаны оптические волокна и имеются пары решеток Брэгга рядом с каждой оптической обмоткой.
На Фиг.23 представлен вид сбоку трубы, где вокруг трубы на каждом участке измерения нестабильного давления обмотаны оптические волокна с одной решеткой Брэгга между каждой парой оптических обмоток.
На Фиг.24 представлен вид сбоку трубы, где вокруг трубы на каждом участке измерения нестабильного давления обмотаны оптические волокна без решеток Брэгга рядом с каждой из оптических обмоток.
На Фиг.25 представлена геометрия оптической обмотки, альтернативная показанной на Фиг.21, 22, в форме трубы радиатора отопления.
На Фиг.26 представлена геометрия оптической обмотки, альтернативная показанной на Фиг.21, 22, в форме дорожки ипподрома.
На Фиг.27 представлен вид сбоку трубы, имеющей пару решеток в каждом осевом положении измерения.
На Фиг.28 представлен вид сбоку трубы, имеющей одну решетку в каждом осевом положении измерения.
На Фиг.29 представлен вид сверху трех альтернативных тензодатчиков.
На Фиг.30 представлен вид сбоку трубы, имеющей три разнесенных по оси тензодатчика, прикрепленных к трубе.
На Фиг.31 представлен вид с торца трубы, имеющей три датчика нестабильного давления, разнесенные друг от друга внутри трубы.
На Фиг.32 представлен вид сбоку трубы, имеющей три датчика нестабильного давления, разнесенные друг от друга внутри трубы.
На Фиг.33 представлен вид сбоку трубы, имеющей три датчика нестабильного давления, разнесенные внутри трубы по оси и по радиусу.
На Фиг.34 представлен вид сбоку трубы, имеющей внутреннюю трубу с распределенными вдоль оси обмотками оптических волокон датчиков нестабильного давления.
На Фиг.35 представлен вид сбоку трубы, имеющей внутреннюю трубу с распределенными вдоль оси датчиками нестабильного давления, установленными вдоль трубы.
На Фиг.36 представлен вид сбоку трубы, имеющей внутреннюю трубу с тремя распределенными по оси гидрофонами, расположенными внутри трубы.
На Фиг.37 представлена диаграмма, показывающая распространение акустических волн от одного источника в двумерном пространстве на ряд распределенных в пространстве датчиков.
На Фиг.38 представлен вид сбоку трубы, имеющей распространяющиеся вправо и влево вдоль трубы акустические волны.
На Фиг.39 представлена диаграмма, показывающая распространение акустических волн от двух источников в двумерном пространстве на ряд распределенных в пространстве датчиков.
На Фиг.40 представлена блок-схема альтернативного варианта выполнения системы измерения параметров текучей среды.
На Фиг.41 представлена зависимость скорости звука от процентного содержания воды.
Сведения, подтверждающие возможность осуществления изобретения
На Фиг.1 представлена труба (или трубопровод) 12, имеющая три датчика 14, 16, 18 акустического давления, расположенные в трех положениях х1, х2, x3 вдоль трубы 12. Давление может быть измерено через отверстия в трубе 12, подсоединенные к внешним датчикам давления, или другими описанными ниже способами. С датчиков 14, 16, 18 давления по линиям 20, 22, 24 выдаются изменяющиеся во времени сигналы P1(t), P2(t), Р3(t) давления на схемы 26, 28, 30 Быстрого Преобразования Фурье (БПФ) соответственно. Схемы 26, 28, 30 БПФ производят вычисление преобразования Фурье зависящих от времени входных сигналов P1(t), P2(t), Р3(t) и выдают на линии 32, 34, 36 расположенные в комплексной частотной области (зависящие от частоты) сигналы Р1(ω), Р2(ω), Р3(ω), определяющие частотный состав входных сигналов. Вместо Быстрого Преобразования Фурье может использоваться любой другой метод получения характеристик сигналов P1(t), Р2(t), Р3(t) в спектральной области. Например, может использоваться взаимная спектральная плотность и спектральная плотность мощности для образования передаточных функций (или частотных характеристик) в частотной области, описанных ниже.
Далее, некоторые или все функции процессора сигналов или логического средства (устройства) 60 могут быть осуществлены на программном уровне (с использованием микропроцессора или компьютера) и/или с использованием программно-аппаратных средств, либо с использованием аналоговой или цифровой аппаратуры, имеющей достаточную память, соответствующие интерфейсы и необходимую производительность для осуществления описанных здесь функций.
Спектральные сигналы Р1(ω), Р2(ω), Р3(ω) поступают в логическую схему 40 вычисления аmix-Мx, которая выдает в линию 46 сигнал, показывающий скорость аmix звука в смеси (более подробно пояснено далее). Сигнал аmix вводится в устройство 48 преобразования данных (решающее), в котором аmix преобразуется в процентное содержание текучей среды, и которое выдает соответствующий сигнал "Состав %" в линию 50 (как будет описано далее). Кроме этого, если число Маха Мx не оказывается пренебрежимо малым и его необходимо знать, логическая схема 40 вычисления может также выдать в линию 59 сигнал Мx, показывающий число Маха Мx (как будет показано далее).
В частности, известно, что для плоских одномерных акустических волн в однородной смеси поле P(x,t) акустического давления в положении х вдоль трубы, в которой измеряемая длина волны λ акустических волн велика по сравнению с диаметром d трубы 12 (т.е., λ/d≫1), может быть представлено, как суперпозиция волн, распространяющихся направо и налево, а именно:
(Уравнение 1)

где А, В представляют собой зависящие от частоты комплексные амплитуды волн, распространяющихся в правую и левую сторону соответственно, х показывает положение точки измерения давления вдоль трубы, ω - частота (в рад/с, причем ω=2 πf), a kr, kl являются волновыми числами для волн, распространяющихся вправо и влево соответственно, которые определяются как:
(Уравнение 2)

где amix - скорость звука в смеси в трубе, ω - частота (в рад/с), а Мx - осевое число Маха потока смеси внутри трубы, где
(Уравнение 3)

где Vmix - осевая скорость смеси. Для неоднородных смесей осевое число Маха представляет среднюю скорость смеси, а описание низкочастотного акустического поля остается, в целом, неизменным.
Представлением в частотной области Р(х, ω) зависящего от времени поля P(x, t) акустического давления внутри трубы является коэффициент при еiωt в уравнении (1):
(Уравнение 4)

Было установлено, что, как показано на Фиг.1, использование уравнения (4) для Р(х, ω) в трех разнесенных по оси положениях х1, х2, x3 измерения давления вдоль трубы 12 приводит к уравнению для аmix, представляющему собой функцию отношения результатов измерения давления в спектральной области, что позволяет исключить коэффициенты А, В. Для получения оптимальных результатов коэффициенты А, В должны мало изменяться за время измерения, а в пределах измерительной секции не должно происходить существенного возникновения или поглощения звука (или акустической энергии). Акустическое возмущение входит в измерительную секцию только сквозь концы измерительной секции 51 и, таким образом, скорость звука может быть измерена в пределах измерительной секции 51 вне зависимости от акустического состояния среды снаружи измерительной секции. В частности, результаты измерения давления Р1(ω), Р2(ω), Р3(ω) в спектральном представлении в трех положениях х1, x2, x3, соответственно, вдоль трубы 12, используя уравнение (1) для волн, распространяющихся направо и налево, выглядят следующим образом:
(Уравнения 5-7)



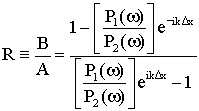
где на заданной частоте коэффициенты А и В являются произвольными постоянными, описывающими акустическое поле между датчиками 14, 16, 18. Образуя отношение Р1(ω)/Р2(ω) из уравнений (6), (7) и решая его относительно В/А, получаем следующее выражение:
(Уравнение 8)
где R определен, как коэффициент отражения.
Образуя отношение Р1(ω)/Р3(ω) из уравнений (5) и (7) и записав его с нулевой правой частью, получаем:
(Уравнение 9)
где R=B/A определено уравнением (8), a kr и kl связаны с аmix, как это определено уравнением (2). Уравнение (9) может быть решено численно, например, путем определения члена "ошибки" (Error) или остаточного члена как абсолютной величины левой части (9) и сведением к минимуму этого члена путем итераций.
(Уравнение 10)
Во многих применениях в нефтяной промышленности осевая скорость потока в трубе мала по сравнению со скоростью звука в смеси (т.е. осевое число Маха Мx мало по сравнению с 1). Например, осевая скорость Voil в обычной нефтяной скважине около 10 фт/с (3,1 м/с), а скорость аoil звука в нефти около 4000 фт/с (1219 м/с). Таким образом, число Маха Mx в смеси чистой нефти составляет 0,0025 (Voil/aoil=10/4000), а уравнение (2) сводится к приближенному выражению:
(Уравнение 11)
а разница между волновыми числами для волн, распространяющихся в правом и левом направлениях, исчезает. В этом случае (когда Мx пренебрежимо мало), поскольку все переменные в уравнении (10), кроме аmix, известны, значение аmix может быть определено итерациями путем оценки члена ошибки на данной частоте ω и вариациями аmix, пока член ошибки не станет равным нулю. Значение аmix, при котором абсолютная величина члена ошибки равна нулю (или минимальна), соответствует точному значению скорости аmix звука в смеси. Поскольку уравнение (10) является функцией частоты ω, скорость аmix звука, при которой ошибка стремится к нулю, одна и та же для каждой частоты измерения ω (более подробно ниже). Однако на практике на некоторых частотах благодаря влиянию других факторов могут быть некоторые отклонения, например, из-за модового состава колебаний в трубе, неакустических возмущений давления, ошибок дискретизации и др., которые, при желании, могут быть отфильтрованы, вырезаны, усреднены и т.д. (более подробно описано ниже). Более того, поскольку на каждой частоте производится независимое измерение одного и того же параметра, множество измерений могут быть взвешенно усреднены или отфильтрованы для обеспечения более надежного измерения сигнала скорости звука.
Примером того, как может быть использована скорость аmix звука в трубе 12, является определение объемного содержания составных частей смеси. В частности, скорость аmix звука смеси двух текучих сред (под текучей средой здесь подразумевается жидкость или газ) в трубе в основном связана с объемным содержанием двух составляющих смесь текучих сред. Это соотношение может быть определено экспериментально или аналитически. Например, скорость звука в смеси может быть выражена как:
(Уравнение 12)
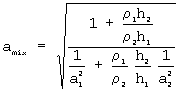
где а1, а2 представляют известные скорости звука, ρ1, ρ2 - известные плотности, h1, h2 - объемные части двух соответствующих текучих сред, аmix - скорость звука в смеси, а плотности ρ1, ρ2 отличаются друг от друга не более, чем на порядок (10:1). Могут быть использованы и другие выражения, связывающие фазовый состав со скоростью звука, полученные экспериментально, аналитически либо численными методами.
Для текучей среды, представляющей собой смесь нефть/вода, на Фиг.2 представлен график зависимости скорости аmix звука в смеси, обозначенной кривой 10, от объемного содержания воды, построенный с использованием уравнения (12). Для данного примера использовались следующие численные значения плотности (ρ) и скорости звука (а) для нефти и воды:
Плотность (ρ): ρwater=1000 кг/м3; ρoil=700 кг/м3.
Скорость звука (a): awater=5000 фт/с (1524 м/с); аoil=4000 фт/с (1219 м/с). Ниже приведен перевод остальных значений скоростей, указанных на чертежах в фт/с в систему СИ:
Индексы 1, 2 в уравнении (12), присвоенные параметрам каждой из текучих сред, являются произвольными, при условии, что они сохраняются неизменными. Так, если измеряется скорость аmix звука в смеси, то может определяться содержание фракций нефть/вода.
На Фиг.3 представлен иллюстрирующий концепцию пример, изображающий матричную модель передачи в виде трубы, имеющей 9 секций (или элементов, или сегментов) 1-9, акустический источник, импеданс ζrad излучения (или распространения) (ζrad=P/ρmixamixμmix), где μmix представляет акустическое возмущение; Мx=0, и где давления Р1, P2, Р3 измеряются по измерительным секциям 5-6 и 6-7. В данном примере каждый элемент имеет длину 1 метр.
Необходимость использования специального акустического источника зависит от конкретного применения, поскольку фоновые акустические шумы внутри трубы могут создавать возбуждение достаточного уровня для скорости звука, вызываемого существующими давлениями. При использовании в нефтяных или газовых скважинах, если уровень фоновых акустических шумов оказывается недостаточным, на стенку скважины или внутри скважины устанавливается источник акустического шума (не показан), с соблюдением акустического согласования с измерительной секцией 51, в пределах которой измеряется скорость звука.
На Фиг.4 на диаграммах (а)-(с) приведен пример осевых свойств смеси в сегментах 1-9 трубы 12. Объемное содержание h воды, скорость аmix звука в смеси, и плотность ρmix смеси изменяются вдоль трубы 12, а в пределах измерительных секций 5, 6 (от 4 до 6 метров) между точками измерения давлений Р1 - P3 остаются неизменными. В частности, значения ρmix, аmix, hwater для секций 1-9 соответственно показаны на Фиг.4 и составляют:
hwater=0,1, 0,2, 0,3, 0,4, 0,5, 0,6, 0,7, 0,8, 0,9;
ρmix=730, 760, 790, 820, 850, 850, 910, 940, 970 [кг/м3];
аmix=4053 (1235,4), 4111 (1253,0), 4177 (1273,2), 4251 (1295,7), 4334 (1321,0), 4334 (1321,0), 4539 (1383,5), 4667 (1422,5), 4818 (1468,5) [фт/с (м/с)];
На Фиг.5, 6 представлены абсолютные значения и фазы отношений спектральных значений сигналов давления Р1(ω)/Р2(ω) и Р1(ω)/Р3(ω) для показанной на Фиг.3 модели со значениями параметров согласно Фиг.4, при 50% содержании воды в измерительной секции и импедансе ζrad излучения, равном 1,0, что соответствует бесконечно длинной трубе с постоянными параметрами ρmix, аmix в секции 9 и за ней.
На Фиг.7 представлен член ошибки из уравнения (10) в виде семейства кривых, по одной для каждой частоты ω, где величина ошибки оценена для значений аmix, изменяющихся от аwater (5000 фт/с (1524 м/с)) до аoil (4000 фт/с (1219 м/с)) для каждой частоты, а частота изменяется от 5 до 200 Гц приращениями в 5 Гц. При необходимости могут быть использованы и другие частоты. Скорость аmix звука, для которой ошибка стремиться к нулю (или минимальна), одинакова для каждой частоты ω измерения. В данном случае ошибка достигает минимума в точке 70, где аmix составляет 4335 фт/с (1321,3 м/с). На приведенном на Фиг.2 графике видно, что для смеси нефть/вода значение аmix, равное 4335 фт/с (1321,3 м/с), соответствует объемному содержанию воды в измерительной секции 50%, что соответствует содержанию воды в использованной модели.
Кроме этого, степень зависимости изменения аmix от изменения ошибки оказывается разной для разных частот, на которых производится оценка. Таким образом, оптимизация работы может быть достигнута путем оценки аmix на определенных частотах, отличающихся малой зависимостью, а такие частоты определяются для конкретных применений и конфигураций устройства.
На Фиг.8 и 9 представлены графики частотной зависимости абсолютной величины и фазы Р1(ω)/Р2(ω) и Р1(ω)/Р3(ω) (т.е. отношения сигналов давления в функции частоты) для модели, изображенной на Фиг.3, при величине импеданса ζrad излучения, равной 0,5, и с неизменными по всем секциям 1-9 свойствами, составляющими: содержание воды 50% (h=0,5), плотность смеси ρmix=850 кг/м3, а скорость звука в смеси аmix=4334 фт/с (1321,0 м/с).
На Фиг.12 с использованием частотных характеристик на Фиг.8, 9 построено семейство кривых, представляющих абсолютную величину члена ошибки из уравнения (10), по одной кривой для каждой частоты ω, где значение аmix изменяется от аwater (5000 фт/с (1524 м/с)) до аoil (4000 фт/с (1219 м/с)) для каждой частоты на четырех частотах 50, 100, 150, 200 Гц. Как отмечалось выше, если ошибка стремится к нулю (или минимальна), скорость звука аmix одинакова для каждой частоты ω оценки. В этом случае ошибка минимизируется в точке 72, где аmix=4334 фт/с (1321,0 м/с), что соответствует значению аmix, показанному на Фиг.7 для того же содержания воды и другого значения ζrad. Согласно графику на Фиг.2 (или уравнению (2)), для смеси нефть/вода значение аmix=4334 фт/с (1321,0 м/с) соответствует 50% объемному содержанию воды в измерительной секции, что согласуется с содержанием воды в модели. Это показывает, что изобретение правильно определяет аmix вне зависимости от акустических свойств смеси за пределами измерительной секции и/или импедансов на концах.
На Фиг.10 и 11 представлены графики частотной зависимости абсолютной величины и фазы Р1(ω)/Р2(ω) и Р1(ω)/Р3(ω) (т.е. отношения сигналов давления в функции частоты) для модели, изображенной на Фиг.3, при величине импеданса ζrad излучения, равной 0,5 и с неизменными по всем секциям 1-9 свойствами: содержание воды 5% (h=0,05), плотность смеси ρmix=715 кг/м3, а скорость звука в смеси аmix=4026 фт/с (1227,1 м/с).
На Фиг.12 с использованием частотных характеристик на Фиг.10, 11 построено пунктиром семейство кривых, представляющих абсолютную величину члена ошибки из уравнения (10), по одной кривой для каждой частоты ω, где значение аmix изменяется от аwater (5000 фт/с (1524 м/с)) до аoil (4000 фт/с (1219 м/с)) для каждой частоты на четырех частотах 50, 100, 150, 200 Гц. Как отмечалось выше, если ошибка стремится к нулю (или минимальна), скорость звука аmix одинакова для каждой частоты ω оценки. В этом случае ошибка минимизируется в точке 74, где аmix=4026 фт/с (1227,1 м/с). Согласно графику на Фиг.2 (или уравнению (12)), для смеси нефть/вода значение аmix=4026 фт/с (1227,1 м/с) соответствует 5% объемному содержанию воды в измерительной секции, что согласуется с содержанием воды в модели и, таким образом, подтверждает справедливость модели.
Как показано на Фиг.12, чувствительность изменений аmix к изменениям в уровне ошибки зависит от частоты оценки как для 5%, так и для 50% содержания воды. В частности, в этом примере из четырех показанных частот ошибка приближается к нулю с максимальной скоростью (ΔОшибка/Δamix) для кривой 200 Гц, что облегчает определение значения, при котором ошибка стремиться к нулю, а значит, и значения аmix. Таким образом, частота 200 Гц, скорее всего, окажется частотой надежного определения скорости звука в приведенном примере.
Если датчики давления разнесены равномерно (т.е. х1-х2=х2-х3=Δх, или Δх1=Δх2=Δх3), а осевое число Маха Мx мало по сравнению с 1 (и, таким образом, kr=kl=k), уравнение (10) может быть решено относительно k (и, таким образом, относительно аmix) в аналитическом виде как функция частотной зависимости давления (или отношения сигналов, зависящих от частоты):
(Уравнение 13)

Решение для аmix дает:
(Уравнение 14)

где Р12=P1 (ω)/P2(ω), Р13=P1(ω)/P3(ω), i - квадратный корень из -1, а функция Log[] представляет собой мнимое число, в результате чего значение скорости аmix звука выражается числом действительным.
Аналитическое решение уравнения (10), показанное в уравнениях (13) и (14), справедливо в основном для частот, на которых длина измерительной секции 51 вдоль трубы 12 (т.е. х3-х1 или 2Δх, для расположенных на одинаковых расстояниях датчиков) меньше длины λ волны акустических волн, которую требуется измерить. Это ограничение обусловлено наличием многих решений уравнения (10). Другие решения уравнения (10) для других частотных диапазонов могут быть найдены с использованием различных известных методов.
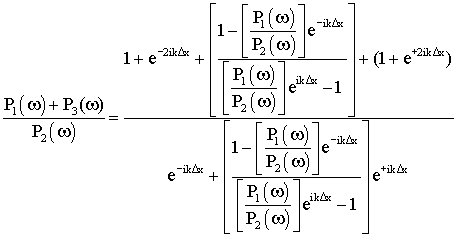
Другое решение уравнения для аmix в аналитической форме (в тригонометрической форме) с использованием трех уравнений (5)-(7) давления для случая, когда датчики давления расположены на одинаковых расстояниях, а Мx пренебрежимо мало (т.е. kl=kr), может быть представлено следующим образом. Отношение [Р1(ω)+Р3(ω)]/P2(ω), образованное с использованием уравнений (5)-(7), приводит к следующему выражению:
(Уравнение 15)

Для датчиков, расположенных на одинаковых расстояниях, х1=0, х2=Δх, х3=2Δх (х1=0 принимается только для удобства), имеем:
(Уравнение 16)

Разделив числитель и знаменатель на А, получаем:
(Уравнение 17)

где R=В/А определяется уравнением (8) с учетом х1=0, х2=Δх:
(Уравнение 18)
Подставляя R в уравнение (17), получаем:
(Уравнение 19)
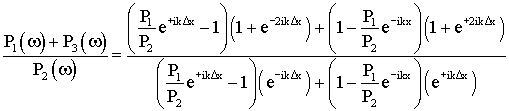
В результате упрощения уравнения (19) получается:
(Уравнение 20)
После группировки членов и упрощения остается:
(Уравнение 21)
Используя соотношения между экспоненциальной и гармоническими функциями, получаем:
(Уравнение 22)

Проведя упрощения и подставив k=ω/amix, получаем:
(Уравнение 23)

Уравнение (23) особенно полезно благодаря своей простой геометрической форме, позволяющей легко определить аmix. В частности, аmix может быть определено непосредственно визуально по цифровому анализатору сигналов (или другому аналогичному прибору), используемому для воспроизведения зависимости, описываемой левой частью уравнения (23), представляющей собой график косинуса, из которого легко может быть определена аmix. Например, при равенстве нулю косинуса уравнение (23) будет равно нулю, a amix будет равно 2ωΔХ/π. Уравнение (23) может быть также использовано для определения аmix посредством итерационной процедуры, когда измеряемая функция рассчитывается по левой части уравнения (23) (на основе измеренных давлений) и сравнивается с кривой косинуса из правой части уравнения (23) при вариациях аmix, пока не будет достигнуто равенство с измеренной функцией. Могут быть использованы и другие методы решения, построения эмпирических кривых, определения параметров и/или минимума ошибок для определения значения аmix, которые подходят наилучшим образом для решения уравнения (23).
Аналитическое решение уравнения (23) относительно аmix дает следующее выражение:
(Уравнение 24)

На Фиг.41 представлен график зависимости скорости звука (аmix) от содержания воды, для которого значения аmix рассчитаны с использованием уравнения (23), как это было описано выше. График на Фиг.41 построен для стальной трубы Schedule 160 с внутренним диаметром 2 дюйма (50,8 мм), одинаковым расстоянием ΔХ=2 фт (0,61 м) между тремя расположенными вдоль оси положениями измерения. Каждый датчик представляет собой пьезоэлектрический датчик переменного давления и в каждом осевом положении измерения установлено четыре датчика, равномерно распределенных по окружности. Линией 452 показаны теоретически рассчитанные по уравнению (12) и Фиг.2 значения содержания воды, как это было описано ранее, а кружками показаны рассчитанные значения для аmix.
С другой стороны, уравнение (9) может быть записано в тригонометрической форме для произвольного расстояния между датчиками давления при пренебрежимо малом Мx (kl=kr):
(Уравнение 25)

где Р32=Р3(ω)/Р2(ω) и Р12=Р1(ω)/Р2(ω).
Как показано на Фиг.13, 14, в том случае, если число Маха Мx не является пренебрежимо малым и/или его необходимо определить, значения Мx и аmix могут быть однозначно определены из уравнения (10) для заданного содержания воды в точке, где член уравнения (10), выражающий ошибку, равен нулю. В частности, для данного процентного содержания воды существует единственное значение, обозначенное точками 90, 92 для 5% и 50% содержания воды соответственно. Для варьирования значений аmix и Мx в заданных пределах при определении значений Мx и аmix, соответствующих ошибке, равной нулю, могут быть использованы известные программы поиска (более подробно описано ниже).
Согласно диаграмме на Фиг.15 логическая схема 40 вычисления начинает работу с шага 100, где вычисляется Р12 как отношение Р1(ω)/Р2(ω), и шага 102, где вычисляется Р13 как отношение Р1(ω)/Р3(ω). На следующем шаге 103 определяется, является ли число Мx Маха в смеси пренебрежимо малым (либо является ли необходимым вычисление Мx). Если Мx пренебрежимо мало, на шаге 104 определяется, расположены ли датчики 14, 16, 18 на равных расстояниях (т.е. х1-х2=х2-х3=Δх). При расположении датчиков на одинаковых расстояниях выполняется шаг 106, которым устанавливаются исходные значения для ω=ω1 (например, 100 Гц) и переменная n цикла, равная 1. Далее на шаге 108 из уравнения (14) в аналитической форме вычисляется аmix(n). Затем на шаге 110 проверяется, выполнила ли логическая схема 40 вычисления аmix данные вычисления на заданном количестве частот, например 10. Если n не больше 10, то шагами 112, 114 переменная n цикла увеличивается на 1, а частота ω увеличивается на заданную величину (например, на 10 Гц), и шаг 108 повторяется. Если логическая схема 40 вычисления выполнила вычисление аmix на 10 частотах, результатом проверки на шаге 110 будет "да" и схема 40 переходит на шаг 116, где определяется среднее значение аmix по значениям аmix (n) на 10 частотах, после чего работа схемы 40 останавливается.
В том случае, если датчики установлены не на одинаковых расстояниях, на шагах 120 устанавливаются фактические значения х1, х2, х3 положений датчиков давления, и исходные значения для ω=ω1 (например, 100 Гц) и переменная n цикла, равная 1. Далее, на шаге 122 устанавливается amix=amix-min (например, аoil=4000 фт/с (1219 м/с)), а на шаге 124 вычисляется член ошибки из уравнения (10). Затем на шаге 126 производится проверка равенства нулю ошибки. Если ошибка не равна нулю, amix увеличивается на заданную величину и алгоритм 40 переходит на шаг 124.
Если на шаге 126 ошибка равна нулю (или минимальна), шаг 130 устанавливает аmix (n)=аmix. Далее на шаге 132 производится проверка значения n на равенство и превышение 10. Если результат отрицательный, шагом 134 n увеличивается на единицу, а частота ω увеличивается на заданную величину (например, на 10 Гц). Если n больше или равно 10, на шаге 138 вычисляется среднее значение аmix по десяти частотам.
Если же число Мx Маха не является пренебрежимо малым, то, как показано на Фиг.16, шагами 200-204 устанавливаются исходные условия: ω=ω1, (например, 100 Гц); Мx=Мx-min (например, 0); аmix=аmix-min (например, аoil=4000 фт/с (1219 м/с)). Затем на шаге 206 вычисляется член ошибки из уравнения (10) на шаге 202. Далее, шагом 208 производится проверка равенства нулю ошибки (или ее минимума). Если результат проверки отрицательный, то на шаге 210 проверяется равенство аmix=аmix-max (например, awater=5000 фт/с (1524 м/с)).
При отрицательном результате проверки на шаге 210, на шаге 212 amix увеличивается на заданную величину (например, 1 фт/с (0,31 м/с)) и алгоритм переходит на шаг 206. Если проверка на шаге 210 дает положительный результат, на шаге 214 Мx увеличивается на заданную величину (например, на 1) и алгоритм переходит на шаг 204.
Когда на шаге 208 определяется ошибка = 0 (или минимальна), шагом 216 устанавливаются аmix(n)=аmix и Мx(n)=Мx, а шагом 218 проверяется, проведены ли вычисления аmix и Мx на 10 различных частотах. Если нет, то шагом 220 переменной n цикла дается приращение 1, а шагом 222 увеличивается значение частоты ω на заданную величину (например, 10 Гц). Если значения аmix и Мx были вычислены на 10 различных частотах (т.е. n равно 10), на шаге 224 вычисляется среднее значение для аmix(n) и Мx(n) на 10 различных частотах для определения аmix и Мx. Вышеуказанное значение аmix аналогично обсуждавшемуся ранее и показанному на Фиг.13, 14, где окончательным было значение аmix в точках 90, 92, при равенстве нулю ошибки.
Вместо вычисления среднего значения для аmix на шагах 116, 138, 224, аmix может быть вычислена путем фильтрации или вырезания аmix (n) на заданных частотах. Количество частот может быть любым и значения частот, на которых производится оценка, могут быть любыми. Кроме того, вместо вычисления аmix и/или Мx на более чем одной частоте, вычисления могут быть проведены только на одной частоте. Далее алгоритм, представленный на Фиг.15, 16, является одним из многих возможных алгоритмов расчета аmix при использовании настоящего изобретения.
Согласно Фиг.1 и 18 на точность или правильность использования измеренной скорости аmix звука в смеси может влиять эластичность (или гибкость) трубы 12 (или трубопровода). В основном для этого есть два механизма.
Согласно первому, прогиб трубы 12 в области измерений снижает измеренную скорость аmix звука по сравнению со скоростью в неограниченном пространстве. Скорость звука в неограниченном пространстве (бесконечной среде) является свойством, тесно связанным со свойствами текучей среды. В частности, на Фиг.18 представлен график, демонстрирующий зависимость влияния толщины стенки трубы (или эластичности трубы) на измеренную скорость звука за счет сокращения скорости звука для трубы с номинальным диаметром, составляющим 2 дюйма (50,8 мм), имеющей 100% заполнение водой (ρw=1000 кг/м3; аw=5000 фт/с (1524 м/с)) и вакуум (или воздух) снаружи трубы. Скорость звука в воде в бесконечно жесткой трубе (т.е. с бесконечно большим модулем упругости) показана горизонтальной кривой 350, а скорость звука в воде в стальной трубе показана кривой 352. Точка 354 на кривой 352 соответствует значению скорости звука около 4768 фт/с (1453,3 м/с) для стальной трубы Schedule 80. Соответственно, чем толще стенка трубы, тем ближе скорость звука приближается к значению 5000 фт/с (1524 м/с) для бесконечно жесткой трубы.
Показанные на Фиг.18 погрешности, внесенные в измерения нежесткой (эластичной) трубой 12, могут быть прокалиброваны и исправлены для определения скорости звука в текучей среде в безграничной среде. Таким образом, хотя в данном случае система (труба) изменяет скорость распространения, эта скорость может быть однозначно преобразована в скорость распространения в бесконечной среде.
В частности, для текучих сред, находящихся в эластичной трубе, скорость распространения волн сжатия зависит от конструктивных свойств трубы. Для текучей среды, находящейся в трубе 12, окруженной текучей средой с пренебрежимо малым акустическим импедансом (ρа), скорость распространения связана со скоростью звука в бесконечной текучей среде и конструктивными свойствами следующим соотношением:
(Уравнение 26)

где R - радиус трубы, t - толщина стенки трубы, ρmix - плотность смеси (или текучей среды), аmix - фактическая скорость звука в смеси, ameasured - измеренная скорость звука в смеси, содержащейся в трубе 12, и Е - модуль Юнга материала трубы. Уравнение (26) справедливо в основном для частот акустических колебаний, длина волны которых велика (например, больше чем 2:1) по сравнению с диаметром трубы, и для частот, низких по сравнению с естественной частотой выхода газов из трубы. Уравнение (26) также применимо для частот, достаточно низких для того, чтобы кольцевая жесткость трубы гасила радиальные отклонения трубы.
Кривая 352, показанная на Фиг.18 (для 100% содержания воды), может представлять собой одну из семейства кривых для различных смесей нефть/вода. В уравнении (26) члены могут быть выражены через значения плотности каждой составной части и объемный фазовый состав следующим образом:

где ρi представляет плотность i-й составляющей многокомпонентной смеси, аi - скорость звука в i-й составляющей смеси, φi - объемное содержание фазы для i-й составляющей смеси и N - число компонентов смеси. Зная свойства трубы, плотности и скорость звука (в бесконечном пространстве) для отдельных составляющих и измеренную скорость звука в смеси, можно решить уравнение (26) относительно аmix. Таким образом, аmix может быть определена для эластичной трубы. Калибровка трубы может быть выполнена с использованием других уравнений или посредством других средств, например аналитических, экспериментальных, вычислительных.
Для работы датчиков давления определенных типов, например датчиков деформации трубы, акселерометров, датчиков скорости или датчиков смещений, упоминаемых ниже, желательно, чтобы труба 12 обладала некоторой эластичностью.
С другой стороны, для уменьшения влияния этих ошибок (и необходимости соответствующей калибровки), вызываемых эластичностью трубы, осевая измерительная секция 51 трубы 12, вдоль которой установлены датчики 14, 16, 18, может быть сделана насколько возможно жесткой. Для достижения необходимой жесткости толщина стенки 53 в испытательной секции 51 может быть сделана заданной толщины, либо измерительная секция 51 может быть сделана из очень жесткого материала, например стали, титана, Кевлара®, керамики или других материалов с высоким модулем упругости.
Рассмотрим второй вариант, когда труба 12 обладает эластичностью и акустически связана с текучими средами и материалами снаружи трубы 12 в измерительной области, такими как затрубные текучие среды, обсадная колонна, скальные образования и др., а акустические свойства этих текучих сред и материалов снаружи диаметра трубы 12 могут влиять на измеренное значение скорости звука. Поскольку акустические свойства таких текучих сред и материалов непостоянны и неизвестны, их влияние на измеренные значения скорости звука не может быть надежно скорректировано путем калибровки (либо учтено детерминированной поправкой к скорости распространения в бесконечной среде).
На Фиг.20 показано, как для снижения указанного воздействия снаружи на внешнюю поверхность трубы 12 в месте установки на трубе 12 датчиков давления 14, 16, 18 надевается наружная изолирующая муфта (или оболочка, коробка, кожух, крышка) 410. Муфта 410 образует замкнутую камеру 412 между трубой 12 и муфтой 410. Мы установили, что когда камера 412 заполнена газом, например воздухом, отсутствует акустическая связь между акустической энергией в трубе и текучими средами и материалами снаружи трубы 12 на измерительном участке. В таком случае для эластичной трубы скорость звука может быть скорректирована с получением действительной скорости звука в текучей среде в трубе 12, как и было описано выше. Муфта 410 аналогична муфте из заявки серийный № (рег. № CiDRA CC-0187), под названием "Измерение распространяющихся акустических волн в эластичных трубах", поданной одновременно с настоящей заявкой и включенной в настоящее описание путем ссылки.
Как показано на чертеже на Фиг.19, вместо одиночных точечных датчиков 14, 16, 18 давления в осевых положениях х1, х2, х3 вдоль трубы 12 может быть использовано два или более датчиков давления, например четыре датчика 400-406, расположенных по окружности трубы 12 в каждом из осевых положений х1, х2, х3. Сигналы от датчиков 400-406 давления, расположенных по окружности в заданном осевом положении, могут быть усреднены с получением значения нестабильного акустического давления, усредненного по поперечному сечению (или по кругу). Может быть использовано и другое количество датчиков акустического давления, и другое их расположение по окружности. Усреднение показаний нескольких расположенных по окружности датчиков давления уменьшает шумы от возмущений и вибраций трубы и других источников шума, не связанных с одномерными акустическими волнами в трубе 12, тем самым создается ряд распределенных в пространстве датчиков давления, способствующий определению одномерного звукового поля внутри трубы 12.
Описанные здесь датчики 14, 16, 18 давления могут быть датчиками давления любого типа, пригодными для измерения нестабильного (или переменного, или динамического) давлений внутри трубы, например пьезоэлектрические, оптические, емкостные, резистивные (например, мост Уитстона), акселерометры (или сейсмоприемники), устройства для измерения скорости, устройства для измерения смещения и т.д. Если используются оптические датчики, то датчики 14-18 могут представлять собой датчики на основе решеток Брэгга, как, например, описанные в находящейся в процессе одновременного рассмотрения патентной заявке США, Серийный №08/925,598 под названием "Высокочувствительный оптоволоконный датчик давления для использования в жестких условиях окружающей среды", поданной 8 сентября 1997 г. С другой стороны, датчики 14-18 могут быть электрическими или оптическими тензодатчиками, укрепляемыми на наружной или внутренней стенке трубы или заделываемыми в наружную или внутреннюю стенку трубы, которыми измеряется деформация стенки трубы. Сюда входят микрофоны, гидрофоны или любые другие датчики, пригодные для измерения нестабильных давлений внутри трубы 12. В варианте выполнения настоящего изобретения, в котором используются оптические волокна в качестве датчиков 14-18 давления, они могут быть подключены по отдельности, либо объединены по одному или нескольким оптическим волокнам, с использованием спектрального уплотнения (WDM), временного уплотнения (TDM), либо любого другого способа оптического уплотнения (описывается ниже).
Как показано на Фиг.21, если в качестве одного или более датчиков 14-18 давления используется тензодатчик, он может измерять изменения Рin нестабильного (или динамического, или переменного) давления внутри трубы 12 путем измерения упругого расширения или сокращения, как это показано стрелками 350, диаметра (то есть окружности, как это показано стрелками 351) трубы 12. Вообще говоря, тензодатчики будут измерять отклонение стенки трубы в любом направлении, вызванное колебаниями нестабильного давления внутри трубы 12. Упругое расширение и сокращение трубы 12 измеряется в точке установки тензодатчика при изменении внутреннего давления Рin и тем самым измеряется местная деформация (осевая деформация, окружная деформация или внеосевая деформация), создаваемая отклонениями в направлениях, указываемых стрелками 351 на трубе 12. Величина изменения длины окружности зависит от кольцевой прочности трубы 12, внутреннего давления Pin, внешнего давления Рout снаружи трубы 12, толщины Тw стенки 352 трубы и жесткости или модуля упругости материала трубы. Таким образом, толщина стенки 352 трубы и материал трубы в измерительных секциях 51 (Фиг.1) могут быть выбраны, исходя из требуемой чувствительности датчиков 14-18 и других факторов, и могут отличаться от толщины стенок или материала трубы 12 за пределами измерительного участка 51.
Если в качестве одного или более датчиков 14-18 давления используется акселерометр, то, как следует из чертежей на Фиг.21 и Фиг.1, он может измерять изменения Рin нестабильного (или динамического, или переменного) давления внутри трубы 12 путем измерения ускорения поверхности трубы 12 в радиальном направлении, как показано стрелками 350. Ускорение поверхности трубы 12 измеряется в месте установки акселерометра при изменении внутреннего давления Рin и тем самым измеряется местная упругая динамическая реакция стенки 352 трубы в радиальном направлении. Величина ускорения определяется кольцевой прочностью трубы 12, внутренним давлением Рin, наружным давлением Рout снаружи трубы 12, толщиной Тw стенки 352 трубы и жесткостью или модулем упругости материала трубы. Таким образом, толщина стенки 352 трубы и материал трубы в измерительных секциях 51 (Фиг.1) могут быть выбраны, исходя из требуемой чувствительности датчиков 14-18 и других факторов, и могут отличаться от толщины стенок или материала трубы 12 за пределами измерительного участка 51. С другой стороны, датчики 14-18 давления могут содержать устройства измерения радиальной скорости или смещения, позволяющие измерять характеристики радиального смещения стенки 352 трубы 12 под влиянием изменений давления, создаваемых изменениями нестабильного давления в трубе 12. Акселерометр, датчики скорости или смещения могут быть аналогичны описанным в находящейся в процессе одновременного рассмотрения патентной заявке США тех же авторов, серийный № (рег. № CiDRA CC-0194) под названием "Датчик давления на смещении, измеряющий нестабильное давление в трубе", поданной одновременно с настоящей заявкой и включенной в настоящее описание путем ссылки.
В случае использования оптических тензодатчиков (см. Фиг.22, 23, 24) датчики 14-18 переменного давления могут быть выполнены путем наматывания оптического волокна 300 обмотками вокруг трубы 12 и прикрепления к ней в каждом положении установки датчика давления, как это обозначено катушками или обмотками 302, 304, 306 для давлений Р1, P2, Р3 соответственно. Обмотки 302-306 волокон обмотаны вокруг трубы 12 таким образом, что длина каждой из обмоток 302-306 волокон изменяется при изменениях в круговой деформации трубы, вызванных изменениями нестабильного давления внутри трубы 12, благодаря чему производится измерение внутреннего давления в трубе в соответствующем осевом положении. Подобные изменения длины волокна измеряются посредством известных оптических методов, как это будет показано далее. Каждая из обмоток, по существу, измеряет усредненное по кругу давление внутри трубы 12 в соответствующем осевом положении на трубе 12. Кроме этого, обмотки обеспечивают измерение давления, усредненного по оси вдоль осевой длины данной обмотки. В то время как структура трубы 12 обеспечивает некоторую пространственную фильтрацию коротковолновых возмущений, мы установили, что основные принципы работы изобретения остаются, по существу, теми же, что и при использовании точечных датчиков, описанных выше.
Чертеж на Фиг.22, касающийся вариантов выполнения настоящего изобретения, где обмотки 302, 304, 306 соединены последовательно, показывает, что пары решеток Брэгга (310, 312), (314, 316), (318, 320) могут быть расположены вдоль волокна 300 с противоположных концов каждой из обмоток 302, 304, 306 соответственно. Пары решеток используются для разделения сигналов Р1, P2, P3 давления с целью распознавания сигналов отдельных обмоток среди отраженных оптических сигналов. Первая пара решеток 310, 312 вокруг обмотки 302 может иметь общую длину λ1 волны отражения, а вторая пара решеток 314, 316 вокруг обмотки 304 может иметь общую длину λ2 волны отражения, отличающуюся от длины волны отражения первой пары решеток 310, 312. Аналогично, третья пара решеток 318, 320 вокруг обмотки 306 имеет общую длину λ3 волны отражения, отличающуюся от λ1, λ2.
На Фиг.23 показано, что вместо того, чтобы для каждой обмотки иметь свою длину волны парных отражений, используются последовательности решеток 360-366 Брэгга, имеющие только одну решетку между каждой из обмоток 302-306, каждая из которых имеет общую длину λ1 волны отражения.
Показанные на чертежах на Фиг.22 и 23 обмотки 302-306 с решетками 310-320 (Фиг.22) или с решетками 360-366 (Фиг.23) могут иметь различную известную конфигурацию, обеспечивающую точное измерение длины волокна, или изменение длины волокна, в таких измерительных схемах, как интерферометрическая, Фабри-Перо, измерения времени распространения и др. Пример использования метода Фабри-Перо описан в патенте США №4 950 883 "Конструкция оптоволоконного датчика, имеющая отражающие решетки, чувствительные к определенным длинам волн", выданном Гленну. Примером использования времени распространения (Уплотнение с Временным Разделением, TDM) может служить способ, в котором оптический импульс на длине волны передается вдоль волокна 300, а последовательность оптических импульсов отражается обратно вдоль волокна 300. Длина каждой обмотки может быть затем определена по временному интервалу между каждым отраженным импульсом.
В другом варианте в часть волокна или во все волокно между решетками (либо включая решетки, или все волокно, при необходимости) могут быть введены присадки редкоземельных элементов (например, эрбия) для создания перестраиваемого волоконного лазера, как, например, описанного в патенте США №5 317 576 "Непрерывно перестраиваемый одномодовый лазер с редкоземельными присадками", выданном Боллу и др., или в патенте США №5 513 913 "Активный многопозиционный волоконный лазерный датчик", выданном Боллу и др., или в патенте США №5 564 832 "Активный волоконный лазерный датчик с двойным лучепреломлением", выданном Боллу и др., которые включены в настоящее описание путем ссылки.
Хотя решетки 310-324 показаны на Фиг.22, 23 ориентированными по оси трубы 12, они могут быть ориентированы по оси трубы 12, по окружности или иметь любую другую ориентацию. В зависимости от ориентации решетки могут измерять деформацию стенки 352 трубы с различной чувствительностью. Если длина волны отражения решетки меняется в зависимости от изменений внутреннего давления, такие изменения требуются для некоторых конфигураций датчика (например, волоконных лазеров) либо должны компенсироваться в оптических схемах в других конфигурациях, например, за счет сдвига длины волны отражения в заданном интервале для каждой пары решеток. В другом варианте, вместо последовательного включения каждой обмотки они могут быть включены параллельно, например, посредством оптических соединителей (не показаны), установленных перед каждой обмоткой и подключенных к общему волокну 300.
На Фиг.24 показан другой вариант, в котором датчики 14-18 выполнены как чисто интерферометрические датчики путем наматывания обмоток 302-306 на трубу 12 без использования решеток Брэгга, где отдельные волокна 330, 332, 334 подводятся к отдельным обмоткам 302, 304, 306 соответственно. В данном конкретном варианте выполнения для определения длины или изменения длины волокна 300 вокруг трубы 12, связанного с изменением давления, могут использоваться известные интерферометрические методы, как, например, интерферометрические методы Маха Зендера или Майкельсона, например, описанные в патенте США №5 218 197 под названием "Способ и устройство для неинвазивного измерения давления внутри труб с использованием оптоволоконного интерферометрического датчика", выданном Кэрроллу. Интерферометрические обмотки могут быть подключены с уплотнением, как это описано у Дэндриджа и др. в статье "Оптоволоконные датчики для использования на флоте" (IEEE, февраль 1991), или у Дэндриджа и др. в статье "Решетки интерферометрических волоконных датчиков с уплотнением" (SPIE, том 1586, 1991, сс.176-183). Могут быть использованы и другие способы для определения изменения длины волокна. Кроме этого, могут использоваться эталонные оптические обмотки (не показаны) в некоторых интерферометрических методах, которые также могут быть расположены на трубе 12 или вокруг нее, но по своей конструкции нечувствительны к изменениям давления.
На Фиг.25 и 26 показано, как вместо обмоток 302-306, представляющих собой обмотки оптического волокна, полностью охватывающих трубу 12, используются обмотки 302-306, имеющие другие конфигурации, такие как "труба радиатора отопления" (Фиг.25) или "дорожка ипподрома" (Фиг.26), которые показаны сбоку, как если бы труба 12 была разрезана вдоль и развернута на плоскости. В данном варианте выполнения обмотки 302-306 не обязательно должны охватывать трубу на полные 360 град, а могут быть расположены на заданном участке окружности трубы 12 и иметь длину, достаточную для того, чтобы оптическим путем определять изменения в длине окружности трубы. При необходимости могут быть использованы обмотки с другими конфигурациями. Кроме этого, для любой описанной здесь геометрии обмоток может быть использовано более одного слоя волокна, в зависимости от общей требуемой длины волокна. Необходимая осевая длина каждой отдельной обмотки устанавливается в зависимости от параметров переменного давления, подлежащих измерению, например осевой длины возмущения давления, вызванного завихрением, которую надо измерить.
На Фиг.27 и 28 представлены варианты выполнения настоящего изобретения, в которых вместо обмоток 302-306 можно использовать волокно 300 с более короткими отрезками, расположенными вокруг по крайней мере части окружности трубы 12, для оптического определения изменений длины окружности трубы. В пределы области притязаний настоящего изобретения попадают также и датчики, содержащие оптическое волокно 300, расположенное по спирали (не показано) на трубе 12. Как упоминалось выше, в зависимости от ориентации чувствительного элемента тензодатчика изменяется чувствительность к изгибам стенки трубы 352, вызванным изменениями в величине нестабильного давления в трубе 12.
В частности, на Фиг.27 показаны пары решеток (310, 312), (314, 316), (318, 320) Брэгга, расположенные вдоль волокна 300 с отрезками 380-384 волокна 300 между каждой парой решеток соответственно. В этом случае могут быть использованы известные методы измерения, такие как Фабри-Перо, интерферометрический, измерение времени распространения или с применением волоконного лазера, для измерения деформаций трубы по аналогии с описанными в упомянутых выше ссылках.
На Фиг.28 показан другой вариант, в котором на трубе могут быть расположены отдельные решетки 370-374 для определения изменений деформации в трубе 12 (и посредством этого нестабильности давления внутри трубы) на участках измерения. Когда в каждом датчике используется одна решетка, сдвиг длины волны отражения решетки будет показывать изменения диаметра трубы и, таким образом, и давления в ней.
Могут использоваться и любые другие методы и конфигурации оптических тензодатчиков. Тип оптического тензодатчика и способ анализа оптических сигналов не являются важными для настоящего изобретения и область притязаний изобретения не предполагается ограничивать использованием конкретного устройства или способа.
В любом из описанных здесь вариантов выполнения датчики давления могут быть прикреплены к трубе с помощью связующего вещества, клея, эпоксидной смолы, ленты или посредством любых других средств, обеспечивающих необходимый контакт между датчиком и трубой 12. Датчики могут быть либо съемными, либо несъемными, прикрепленными известными в механике способами, например механической скобой, подпружиниванием, зажимом, грейферным захватом, ремнями или другими эквивалентными способами. Кроме этого, оптические волокна и/или решетки могут быть заделаны в теле композиционной трубы. При необходимости в определенных случаях решетки могут быть отделены (либо изолированы от деформаций, либо акустически) от трубы 12.
В пределах области притязаний настоящего изобретения находится также и использование любых других способов измерения деформаций, например посредством высокочувствительных пьезоэлектрических, электронных или электрических тензодатчиков, прикрепленных к трубе 12 или заделанных в нее, что иллюстрируется на Фиг.29, 30. На Фиг.29 представлены различные известные конфигурации высокочувствительных пьезоэлектрических тензодатчиков, к которым относятся и фольговые тензодатчики. На Фиг.30 представлен вариант выполнения настоящего изобретения, в котором датчики 14-18 давления содержат тензодатчики 320. В данном варианте выполнения тензодатчики 320 расположены в пределах заданного участка окружности трубы 12. Расположение по оси и расстояние ΔХ1, ΔХ2 между датчиками 14-18 давления определяется, как это было описано выше.
Как показано на Фиг.31-33, возможен также вариант изобретения, если вместо измерения нестабильных давлений Р1-Р3 на наружной поверхности трубы 12 нестабильные давления измеряются внутри трубы 12. В частности, датчики 14-18 давления, которые измеряют давления Р1, Р2, Р3, могут быть размещены в любом месте внутри трубы 12 и для измерения нестабильных давлений внутри трубы 12 могут быть использованы любые методы.
На Фиг.34-36 показано, что изобретение также обеспечивает измерение скорости звука в смеси, протекающей снаружи трубы или трубки 425. В этом случае трубка 425 размещается внутри трубы 12 и давления Р1-P3 измеряются снаружи трубки 425. Для измерения нестабильных давлений Р1-Р3 снаружи трубки 425 могут быть использованы любые методы. Например, на Фиг.34 показано, что трубка 425 может иметь оптические обмотки 302-306, намотанные вокруг трубки 425 в каждом положении измерения. С другой стороны, любой из описанных здесь датчиков или методов измерения деформаций или смещений, скорости или ускорений может быть использован с трубкой 425. На Фиг.35 показано, что давления Р1-Р3 могут быть также измерены датчиками или методами непосредственного измерения давления, описанными здесь. Для измерения нестабильных давлений внутри трубы 12 могут быть использованы датчики 14-18 измерения нестабильного давления любого другого типа.
На Фиг.36 показано, как для измерения нестабильных давлений внутри трубы 12 могут быть использованы также и гидрофоны 430-434. В этом случае для простоты установки либо по другим причинам гидрофоны 430-434 могут быть размещены в трубке 425. Гидрофоны 430-434 могут быть оптоволоконными, электронными, пьезоэлектрическими либо иного типа. В случае использования оптоволоконных гидрофонов, гидрофоны 430-434 могут быть соединены последовательно либо параллельно на общем оптическом волокне 300.
Трубка 425 может быть сделана из любого материала, который позволяет датчикам нестабильного давления измерять давления Р1-P3, и может быть полой, сплошной, наполненной газом или текучей средой. Пример датчика динамического давления описан в находящейся в процессе одновременного рассмотрения патентной заявке США тех же авторов, серийный № (рег. № поверенного 712-2.40/СС-0067) под названием "Намотанный на оправке оптоволоконный датчик давления", поданной 4 июня 1999 г. Кроме того, конец 422 трубки 425 закрыт и, таким образом, поток будет обтекать конец 422, как это показано линиями 424. Для применения в газовых и нефтяных скважинах трубка 425 может представлять собой спиральную трубку либо эквивалентный по размещению в скважине инструмент, в котором датчики 14-18 для измерения Р1-Р3 находятся внутри трубки 425.
На Фиг.17 представлен вариант выполнения настоящего изобретения для применения в нефтяных или газовых скважинах, в котором измерительная секция 51 может быть соединена с насосно-компрессорной колонной 502 (по аналогии с трубой 12 в измерительной секции 51) либо быть ее частью внутри скважины 500. Изолирующая муфта 410 может быть размещена вокруг датчиков 14-18, как это было показано ранее, и прикреплена к трубе 502 на концах для защиты датчиков 14-18 (или волокон) от повреждения при введении в скважину, при эксплуатации или изъятии из скважины, и/или для изоляции датчиков от воздействия внешних акустических давлений, которые могут существовать снаружи трубы 502, и/или для изоляции переменных давлений в трубе 502 от переменных давлений снаружи трубы 502. Датчики 14-18 подсоединены к кабелю 506, который может содержать оптическое волокно 300 (см. Фиг.22, 23, 27, 28) и подсоединен к приемопередатчику/преобразователю 510, расположенному вне скважины 500.
Когда используются оптические датчики, приемопередатчик/ преобразователь 510 может служить для приема и передачи оптических сигналов 504 к датчикам 14-18 и выдавать выходные сигналы, характеризующие давление Р1-Р3 на датчиках 14-18, на линии 20-24 соответственно. Кроме того, приемопередатчик/преобразователь 510 может быть частью логического средства 60 вычисления параметров текучей среды. Приемопередатчик/преобразователь 510 может быть любым устройством, которое осуществляет соответствующие функции, описанные здесь. В частности, приемопередатчик/преобразователь 510 вместе с оптическими датчиками, описанными выше, может использовать любые методы на основе оптических решеток, например сканирующую интерферометрию, сканирующий метод Фабри-Перо, акустооптическую фильтрацию с перестройкой (AOTF), оптическую фильтрацию, измерение времени распространения, с применением спектрального уплотнения и/или временного уплотнения, и т.д., обеспечивающие достаточную чувствительность для измерения переменных давлений внутри трубы, например описанные в одном или более документах: А. Керси и др. "Система с тензодатчиком на волоконной решетке Брэгга с уплотнением, использующая волновой фильтр Фабри-Перо", Opt. Letters, том 18, №16, август 1993, патенте США №5 493 390, выданном 20 февраля 1996 г. Мауро Верази и др., патенте США №5 317 576, выданном 31 мая 1994 г. Боллу и др., патенте США №5 564 832, выданном 15 октября 1996 г. Боллу и др., патенте США №5 513 913, выданном 7 мая 1996 г. Боллу и др., патенте США №5 426 297, выданном 20 июня 1995 г. Данфи и др., патенте США №5 401 956, выданном 28 марта 1995 г. Данфи и др., патенте США №4 950 883, выданном 21 августа 1990 г. Гленну, патенте США №4 996 419, выданном 26 февраля 1991 г. Мори, включенных в настоящее описание путем ссылки. Описанные здесь датчики давления также могут функционировать с использованием одного или более методов, описанных в приведенных ссылках.
Несколько датчиков 10 в соответствии с настоящим изобретением могут быть подключены к общему кабелю и объединены с использованием любых известных методов уплотнения.
Следует иметь в виду, что настоящее изобретение может быть использовано для измерения объемного содержания фракций текучей среды в смеси любого числа текучих сред, в которой скорость аmix звука в смеси связана (или в существенной мере определяется) с объемным содержанием двух составных частей смеси, например нефть/вода, нефть/газ, вода/газ. Настоящее изобретение может быть использовано для измерения скорости звука в любой смеси и также может быть использовано в комбинации с другими известными параметрами для определения фазового состава смесей с несколькими (более двух) составными частями.
Далее, настоящее изобретение может быть использовано для измерения любого параметра (или характеристики) любой смеси одной или более текучих сред, в которой этот параметр связан со скоростью аmix звука в смеси, например фракционный состав текучей среды, температура, засоленность, состав минералов, частицы песка, уплотнения, свойства трубы и т.д., или любые другие параметры смеси, которые связаны со скоростью звука в смеси. Соответственно, логическая схема 40 вычисления может преобразовать аmix в такой параметр(ры).
Кроме этого, работа устройства по изобретению не зависит от направления потока или величины потока текучей среды (сред) в трубе и от наличия или отсутствия потока в трубе. Также не зависит от местоположения источника акустического давления, характеристик и/или направления(ий) распространения. Также вместо трубы при необходимости для передачи текучей среды может быть использован любой патрубок или трубопровод.
Кроме этого, сигналы в линиях 20, 22, 24 (Фиг.1) могут быть функциями времени H1(t), H2(t), Н3(t), где Hn(t) содержит Pn(t) в качестве своего компонента, так что БПФ[H1(t)]=G(ω)Р1(ω), БПФ[H2(t)]=G(ω)Р2(ω), а отношение H2(ω)/Н1(ω)=G(ω)P2(ω)/G(ω)P1(ω)=Р2(ω)/Р1(ω), где G(ω) представляет собой параметр, присущий каждому сигналу давления, и может изменяться с температурой, давлением или во времени, например характеристики калибровки, такие как дрейф, линейность и др.
Кроме этого, вместо вычисления отношений Р12 и P13 могут быть получены уравнения, аналогичные уравнениям (9) и (10), путем вычисления отношений других двух пар давлений, при условии, что система уравнений (5)-(7) решена для В/А или А/В и отношения двух пар давлений. Кроме этого, показанные здесь уравнения могут быть использованы и другим образом для получения того же результата, что и описан здесь.
Более того, если в каком-либо применении отношение между А и В (т.е. отношение между волнами, распространяющимися направо и налево, или коэффициент отражения R) известно, или значения А и В известны, или значения А и В равны нулю, требуются только два из уравнений (5)-(7) для определения скорости звука. В этом случае скорость аmix звука может быть измерена с использованием только двух датчиков акустического давления, разнесенных по оси вдоль трубы.
Далее, хотя изобретение было описано с использованием спектрального подхода, изобретение может работать и во временной области. В частности, уравнения (5), (6), (7) могут быть записаны в форме уравнения (1) как функции времени, с образованием зависящих от времени уравнений P1(x1, t), P2(x2, t), Р3(x3, t), и решены относительно скорости аmix звука с исключением коэффициентов А, В, с использованием известных методов анализа во временной области и обработки сигналов (например, свертки).
Обращаясь к иллюстрациям на Фиг.37-40, следует отметить, что хотя изобретение было описано выше путем использования уравнения одномерной акустической волны, решением которого для нескольких различных осевых положений производилось определением скорости звука, любой известный метод для определения скорости, с которой распространяется звук вдоль пространственного массива измерений акустического давления, при известном направлении источника(ов), может быть использован для определения скорости звука в смеси. Используемый здесь термин "акустические сигналы", как известно, относится к существенно случайным, стационарным во времени сигналам, имеющим средние (или среднеквадратические) статистические характеристики, которые заметно не меняются в течение заданного интервала времени (т.е. переменные сигналы без переходных процессов).
Например, процедура определения одномерной скорости аmix звука в текучей среде, заключенной в трубе с использованием массива измерений нестабильного давления, аналогична задаче, встречающейся в подводной акустике (например, СОНАР или Звуковая Навигационная Локация). В подводной акустике для определения пеленга (или направления) на подводный источник шумовых сигналов развертываются осевые решетки датчиков. Этот процесс называется "формирование луча". В свободном пространстве, т.е. в безграничной среде, например в океане, скорость, с которой звуковая волна распространяется вдоль осевой решетки, зависит от (1) скорости звука в свободном пространстве и (2) угла падения звуковой волны на осевую решетку.
Как показано на Фиг.37, кажущаяся скорость аx звука, с которой волна распространяется вдоль решетки, связана с углом или пеленгом (θ=90-γ) источника S1 и скоростью а звука в среде. В гидролокации, как известно, скорость звука известна, а измеряется кажущаяся скорость аx звука, посредством которой определяется пеленг по формуле θ=cos-1(a/ax).
С другой стороны, мы установили, что, как показано на Фиг.38, в трубе, где угол или пеленг падения звука на решетку известен, т.е. θ=0 град, скорость а звука в текучей среде в трубе 12 может быть найдена следующим образом.
В частности, как показано на Фиг.39, для одиночного удаленного источника в двумерном (2D) пространстве выражение для волны давления может быть записано следующим образом (например, в общем виде у А.Доулинга и Д.Вильямса "Звук и Источники Звука", Гл.4, с.79-81):
(Уравнение 27)

Давление на решетке при у=0:
(Уравнения 28-29)

где: 
Аналогичное рассмотрение может быть проведено и для волны, распространяющейся влево вдоль решетки от источника S2:
(Уравнение 30)

где: 
При распространении звука вдоль трубы, когда γ1=γ2=90 град, и а=amix, где amix - скорость звука в смеси текучей среды в трубе:
(Уравнение 31)
Таким образом, согласно Фиг.38 для акустических волн, распространяющихся направо и налево в трубе 12, уравнение давления принимает вид:
(Уравнение 32)

совпадающий с уравнением (1), и может быть использовано для определения скорости звука посредством описанных здесь датчиков и решения связанных уравнений (5)-(7), приведенных ранее. Такие же результаты могут быть получены и для источников, излучающих в трехмерном пространстве, при использовании цилиндрической или иных систем координат.
Данные, получаемые от решетки датчиков, могут обрабатываться в любой области, включая пространственно/частотную область (например, уравнение (4)), пространственно/временную область (например, уравнение (1)), область "время/волновые числа" или область "частота/волновые числа" (k-ω). При необходимости в любой из этих или связанных с ними областей могут быть использованы любые известные методы обработки сигналов решеток.
Например, уравнение (5) может быть представлено в области k-ω путем пространственного преобразования Фурье уравнения (5), что приводит к следующему k-ω представлению:
(Уравнение 33)
где k - волновое число, а δ - дельта-функция Дирака, которое показывает пространственно/временное преобразование акустического поля в плоскости k-ω.
С другой стороны, вместо использования трех уравнений (5)-(7), любые известные методы использования рядов распределенных в пространстве датчиков, т.е. пространственных (или фазированных) решеток датчиков для определения направления на акустический источник в трехмерном звуковом поле при известной скорости звука (например, обработка сигналов пространственных решеток для решеток СОНАРов, решеток РАДАРов (радиообнаружение и определение координат) и других решеток, (формирование лучей или иные методы обработки сигналов) могут быть использованы для определения скорости звука при известном направлении распространения акустических волн, а именно вдоль оси трубы. Некоторые из этих известных методов описаны в следующих документах, включенных в настоящее описание путем ссылки: Г.Крим, М.Виберг "Два десятилетия исследований по обработке сигналов решеток - параметрический подход", IEEE Signal Processing Mag., с.67-94; Р.Ниэльсон "Обработка сигналов сонара", гл.2, с.51-59.
В соответствии с этим, как показано на Фиг.40, логическое средство 60 вычисления параметров текучей среды может содержать логическую схему 450 обработки сигналов ряда распределенных в пространстве датчиков, которая принимает сигналы P1(t), P2(t), Р3(t) акустического давления от ряда распределенных в пространстве датчиков и выполняет обработку сигналов, описанную выше, для определения скорости аmix звука с выдачей данных в линию 46.
Должно быть понятно, что любые приведенные здесь признаки, характеристики, варианты и модификации, касающиеся конкретного варианта выполнения, могут быть также применены, использованы или введены в любом другом варианте выполнения, описанном здесь.
Несмотря на то, что изобретение было описано и проиллюстрировано на примерах его выполнения, упомянутые и другие добавления и исключения могут быть сделаны в нем и относительно него без изменения сущности и области притязаний настоящего изобретения.
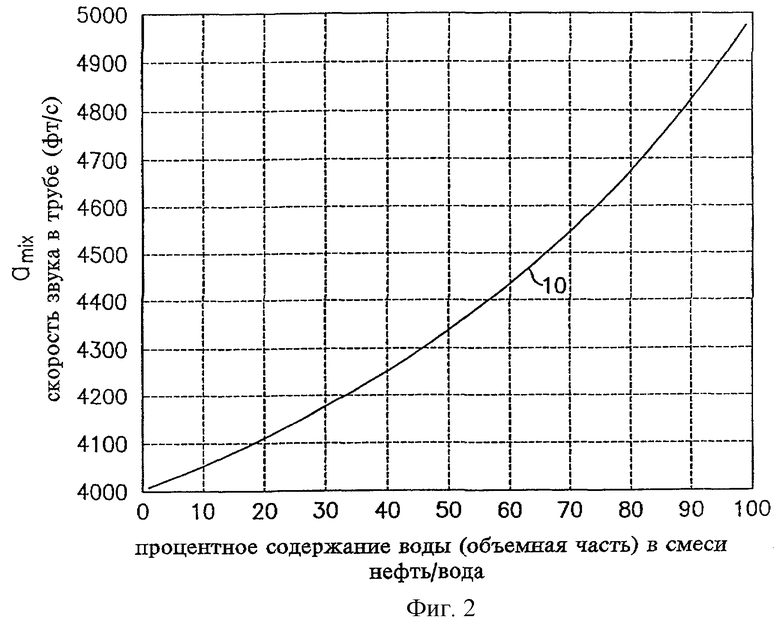

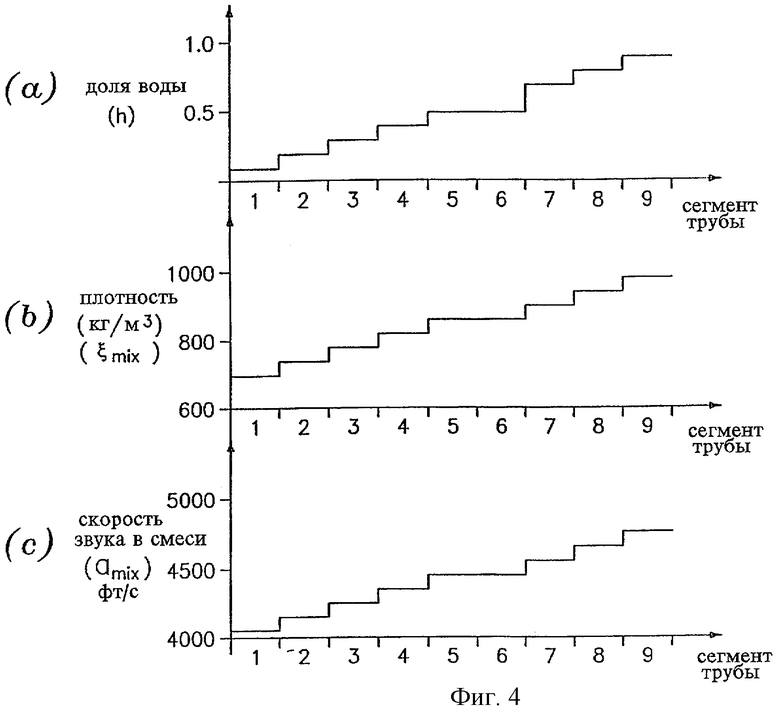
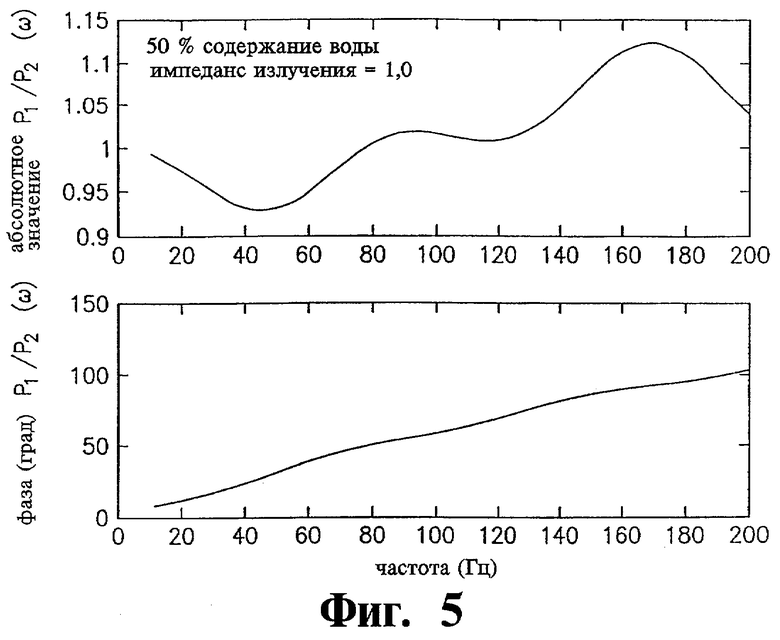
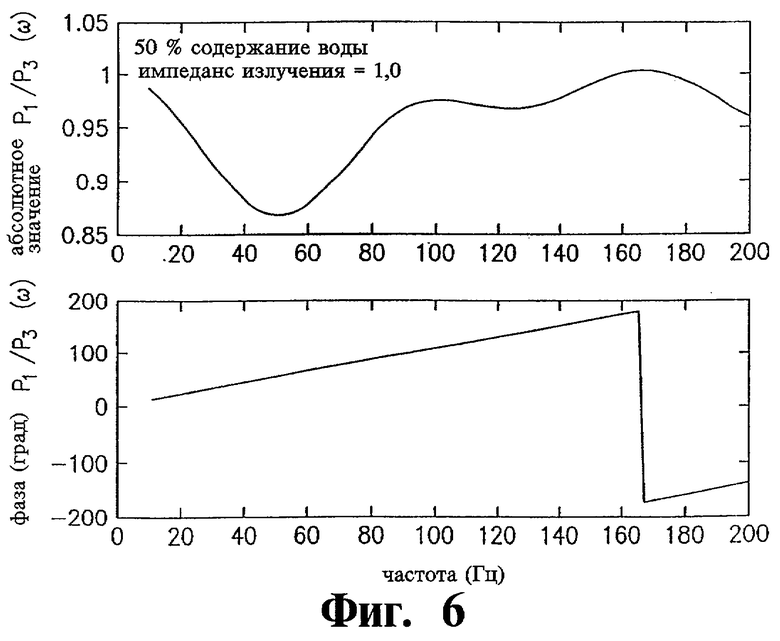

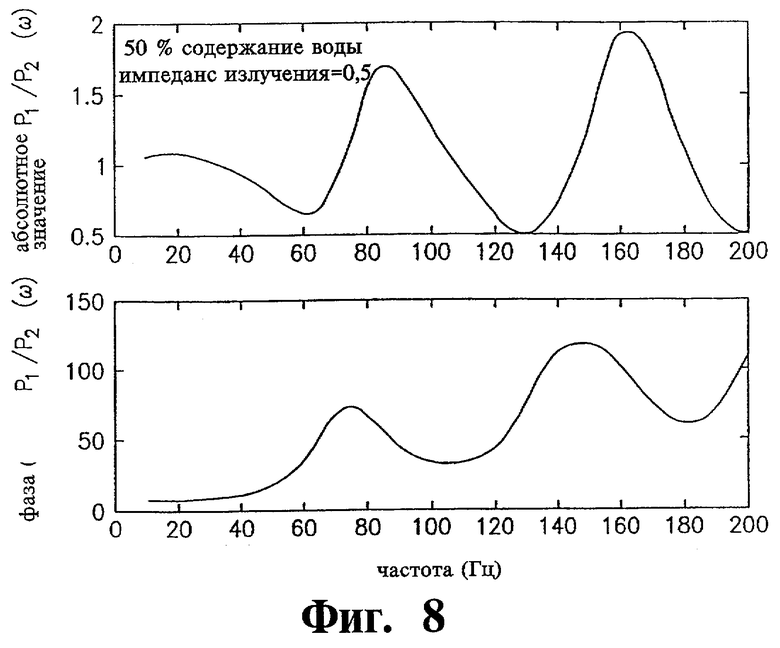
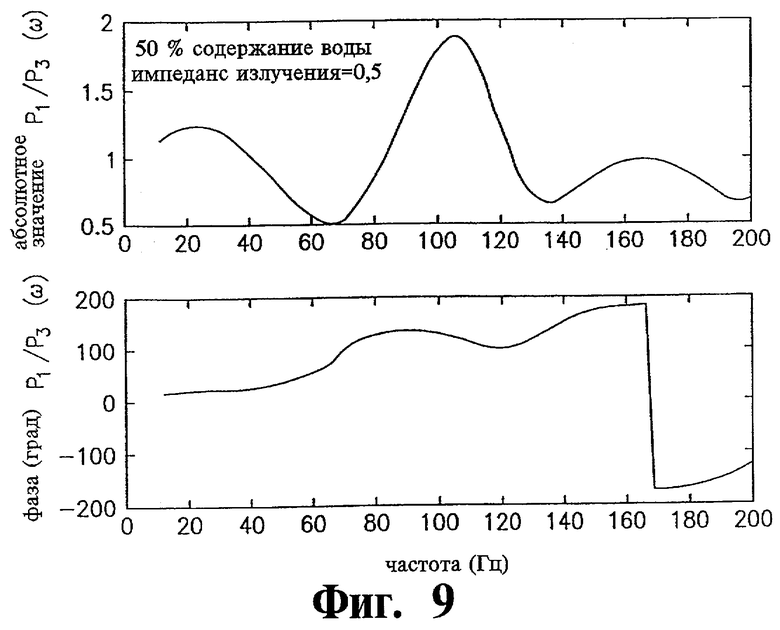
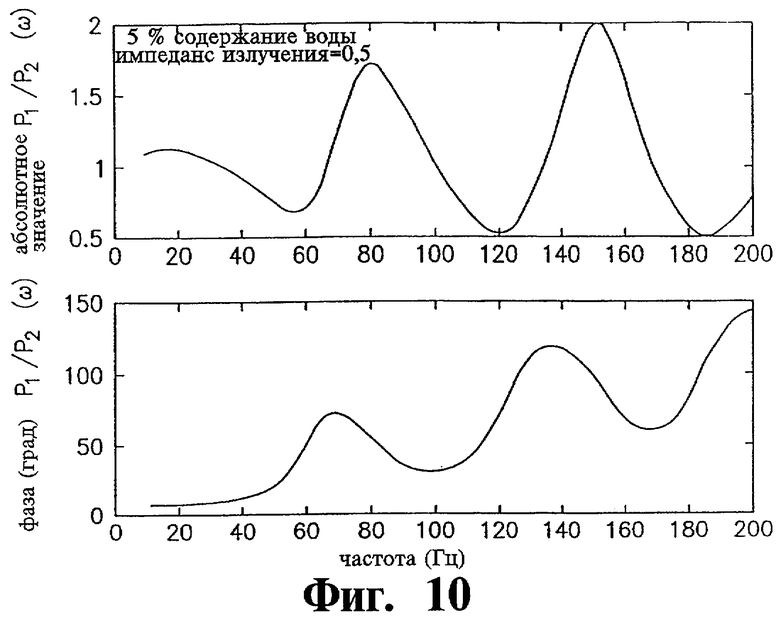
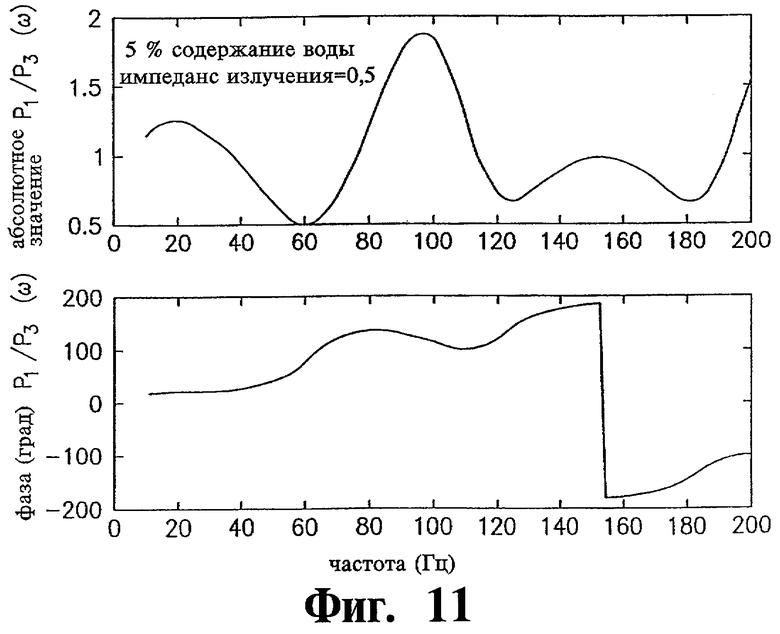
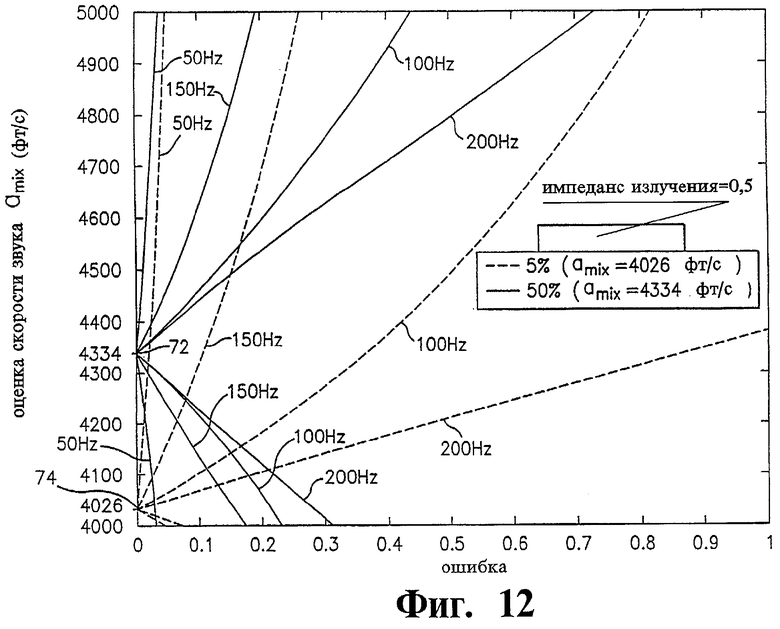
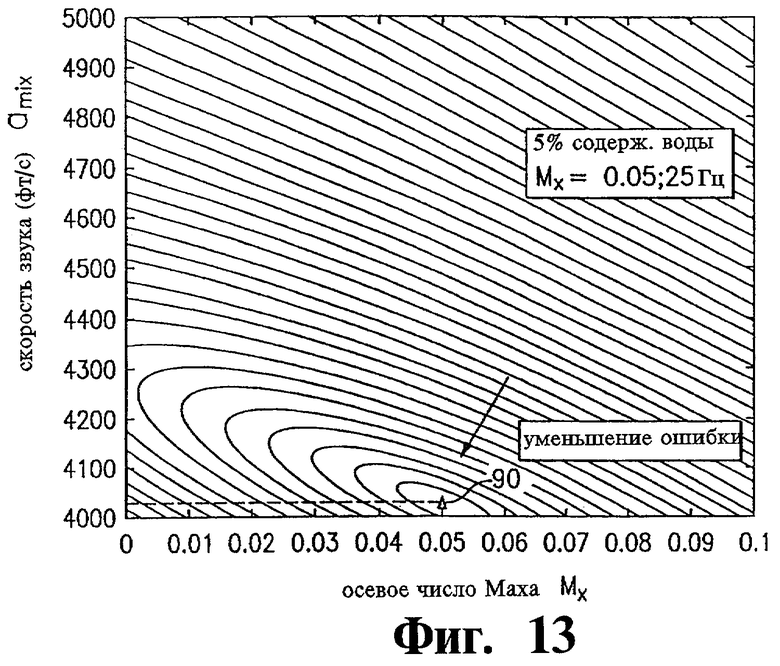
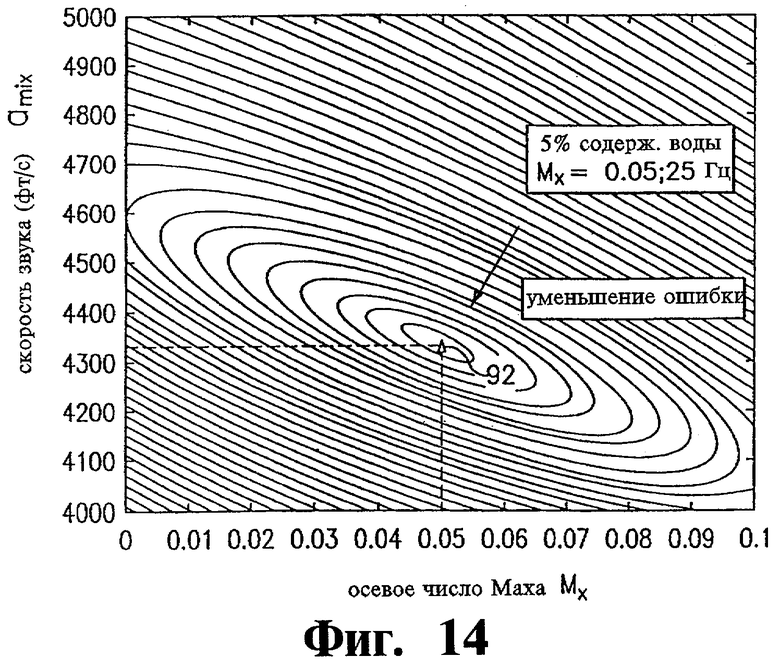

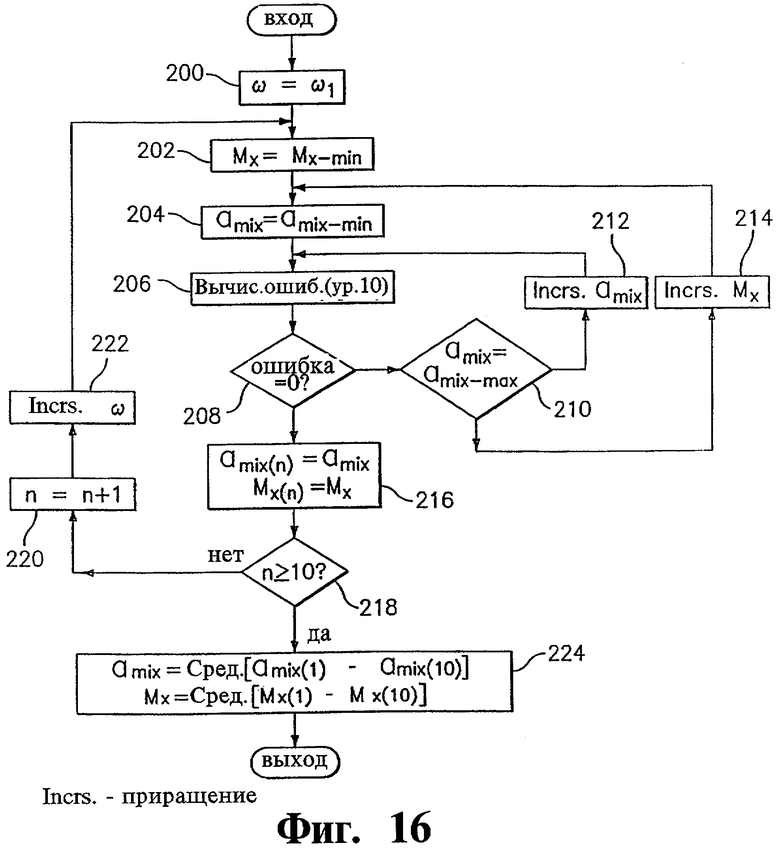
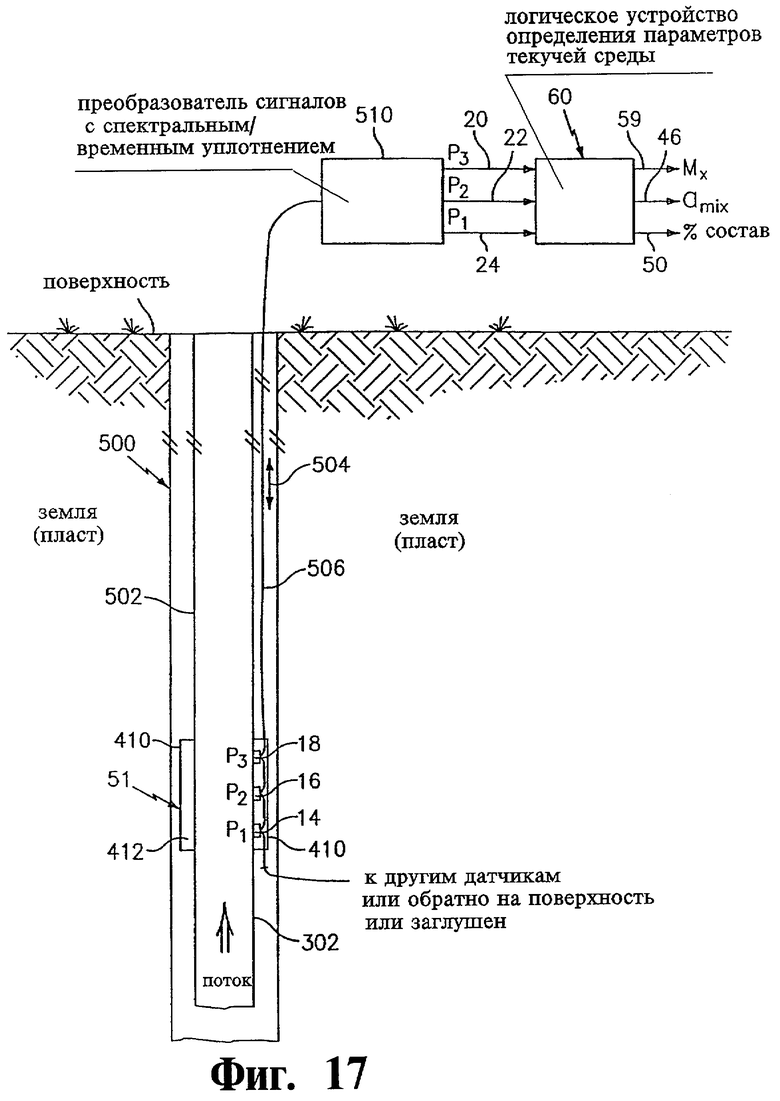
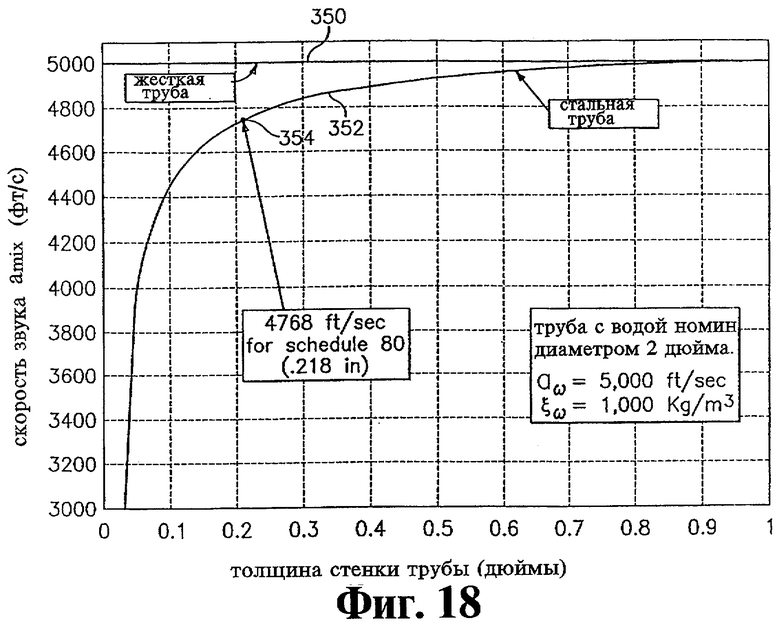
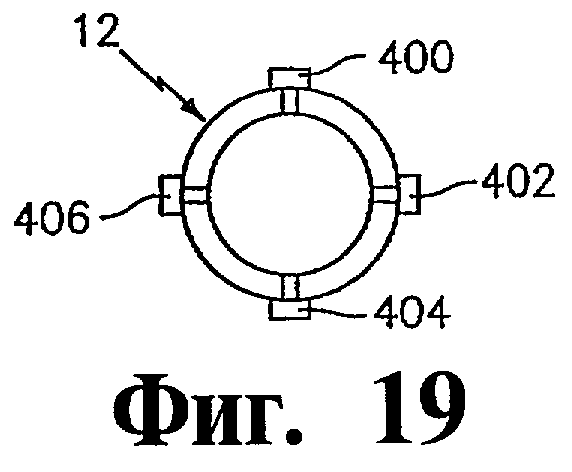
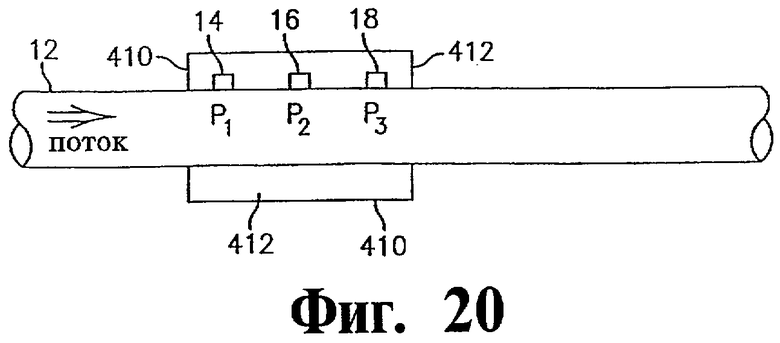
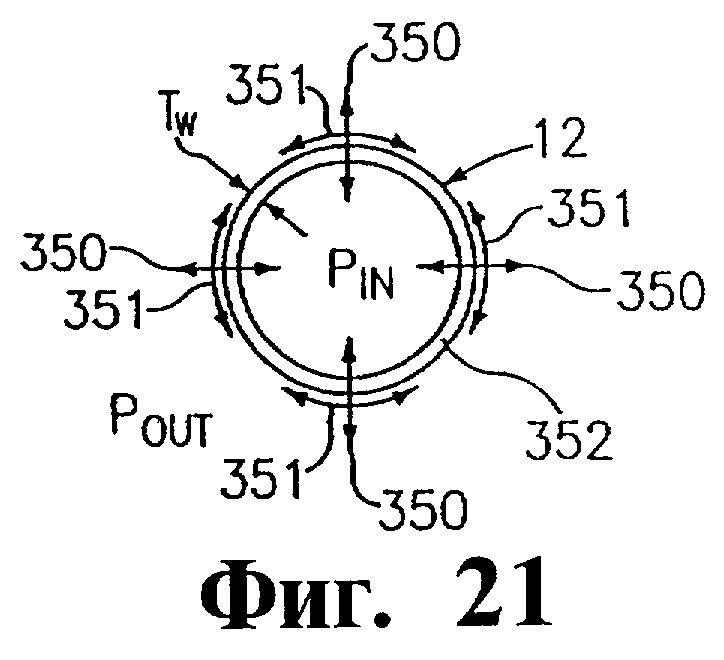

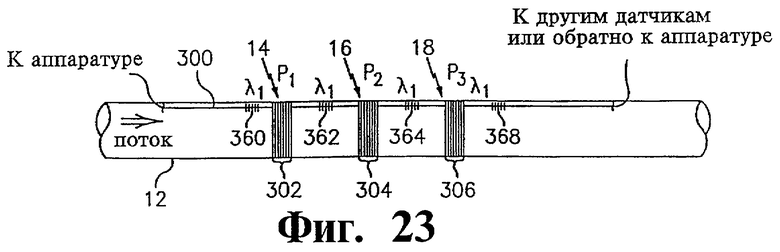
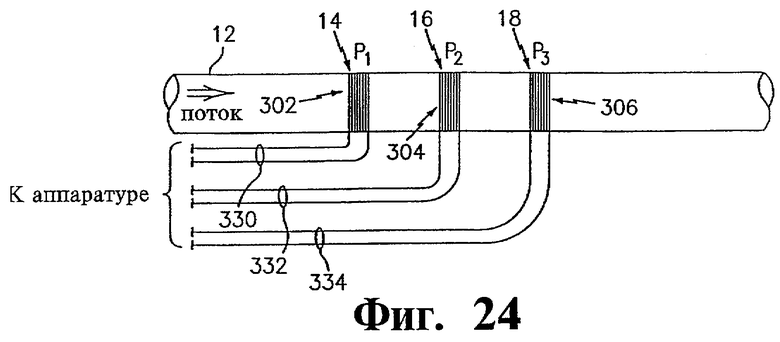
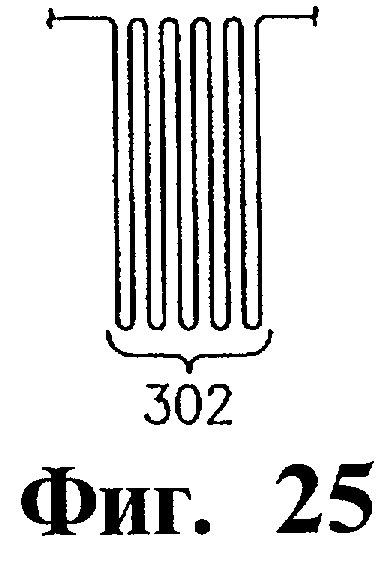
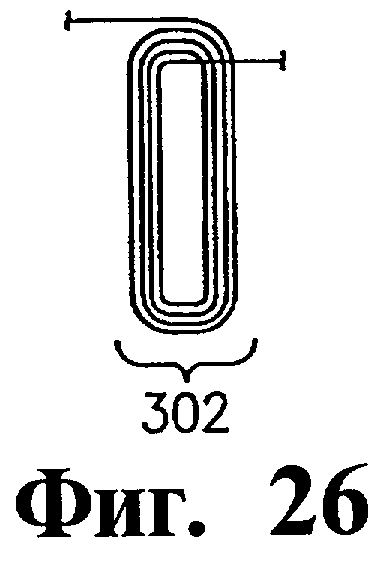
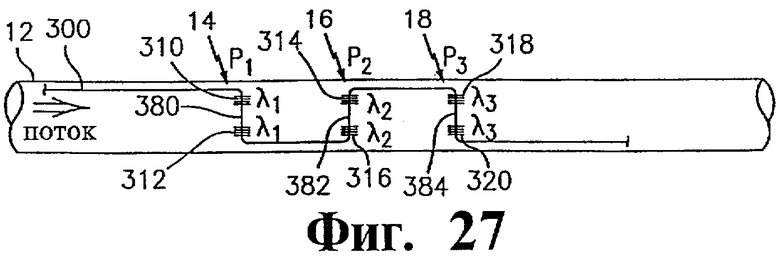
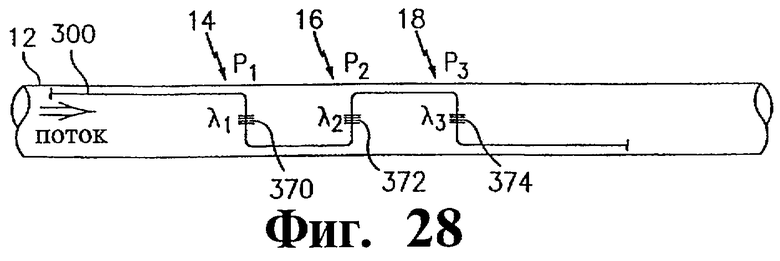
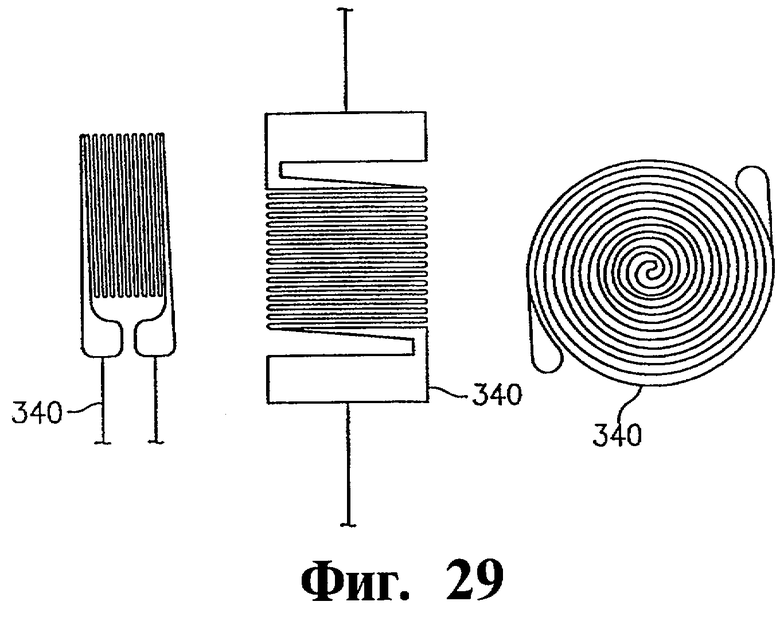
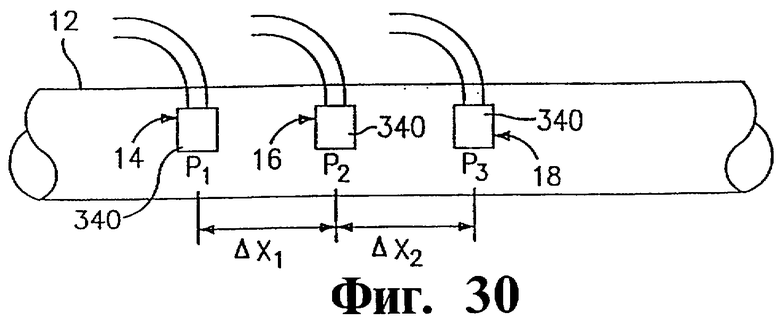
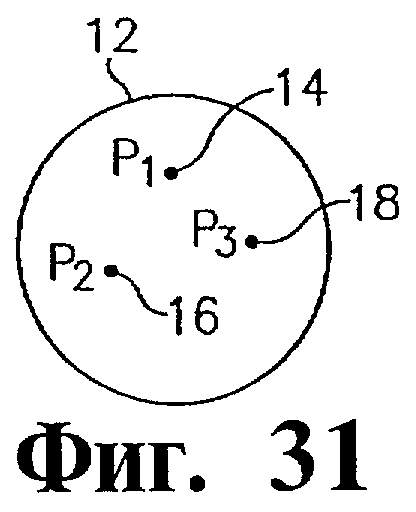
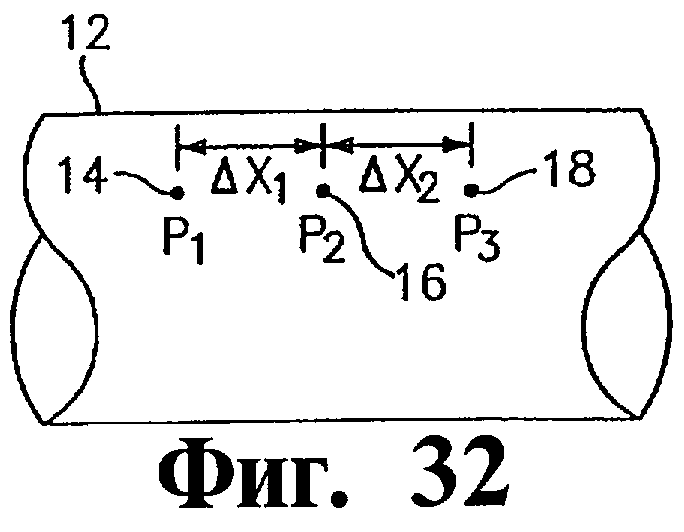

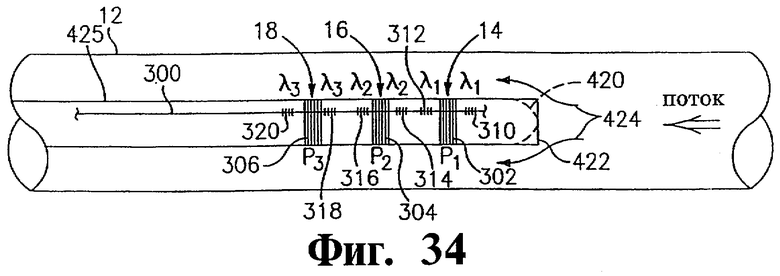
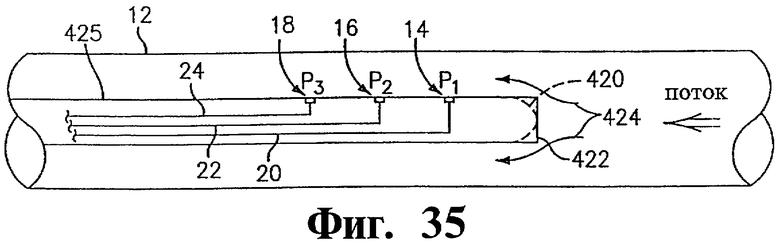
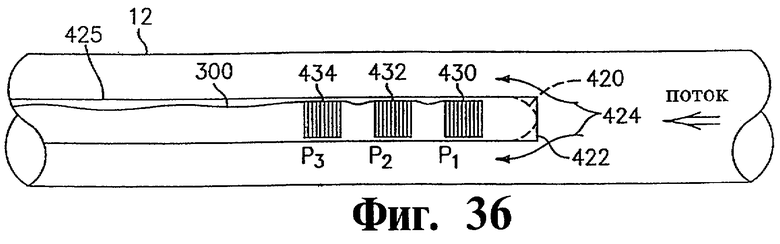
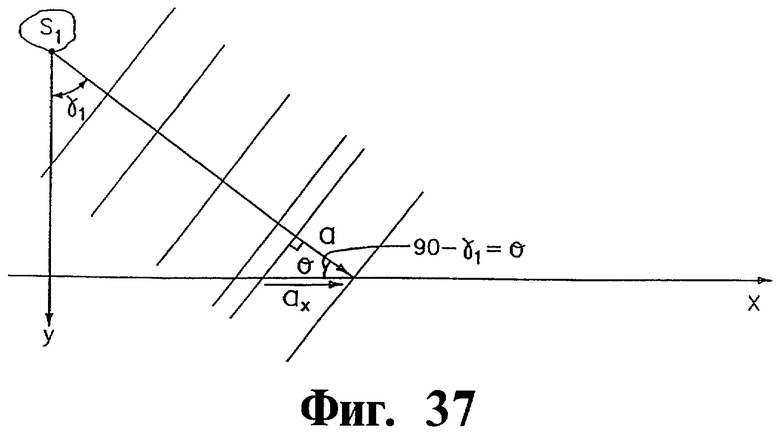
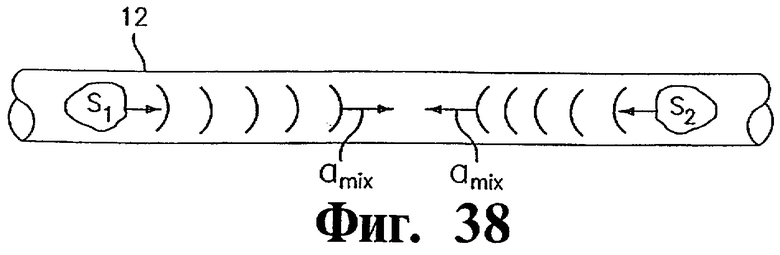
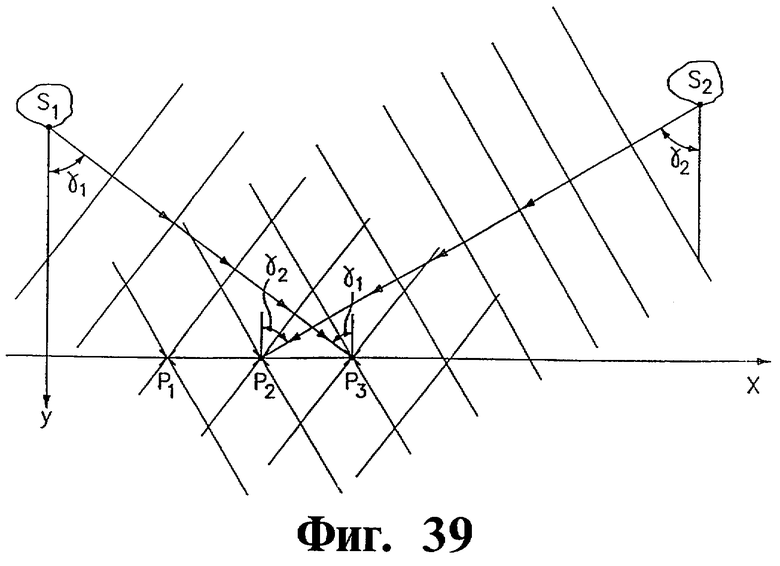
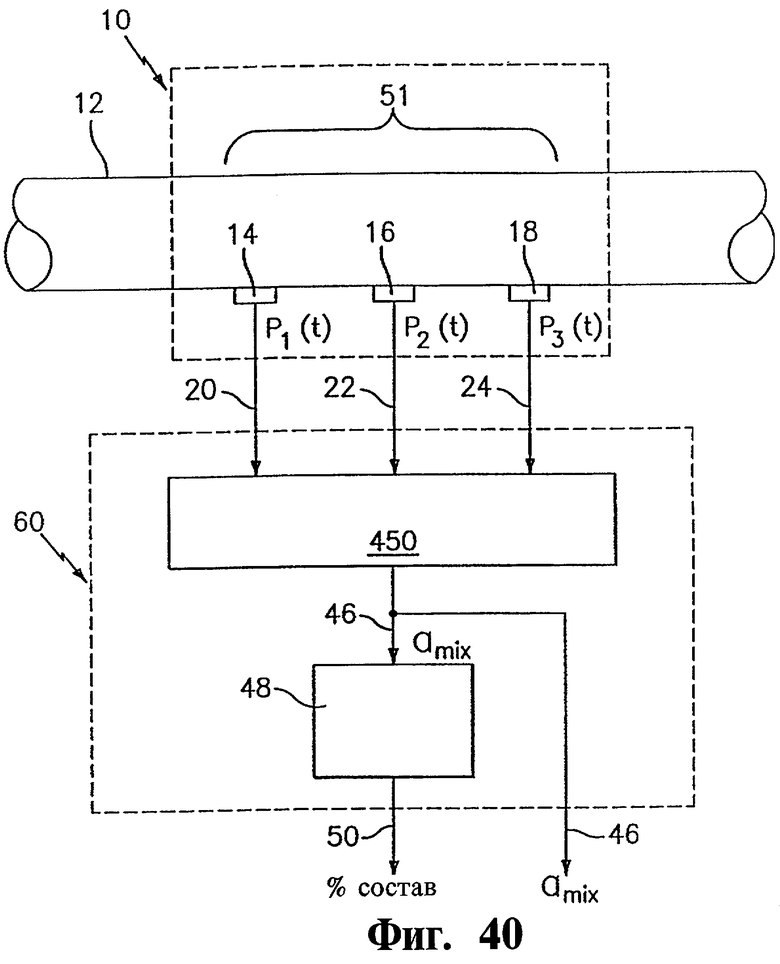
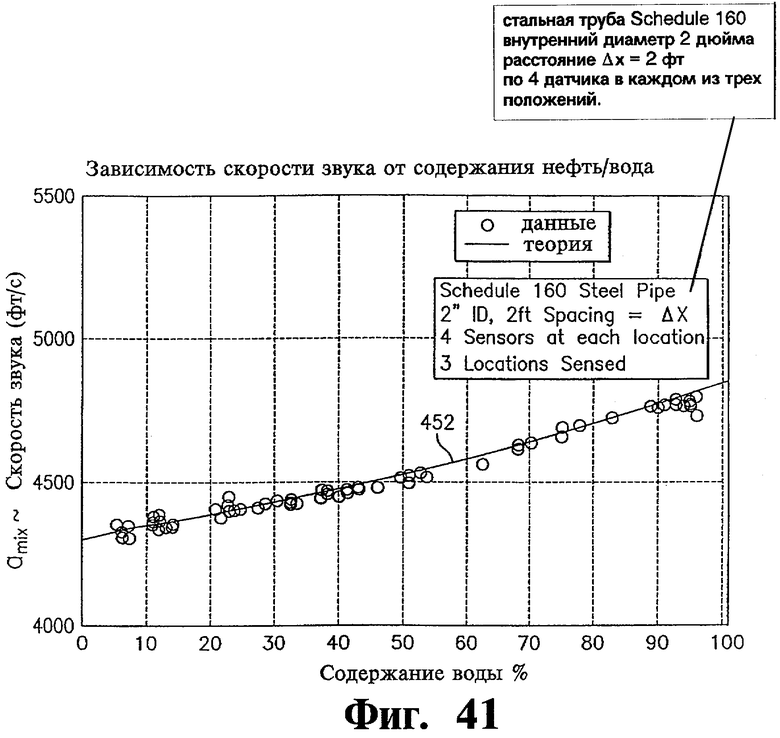
Изобретение относится к измерению параметров текучей среды в трубах. Согласно изобретению, по крайней мере один параметр по крайней мере одной текучей среды в трубе измеряется с использованием ряда распределенных в пространстве датчиков давления, расположенных в заданных осевых положениях вдоль трубы. Датчики давления выдают сигналы акустического давления в линии, которые подключены к логическому устройству обработки сигнала, в котором определяется скорость звука в текучей среде (или смеси) в трубе методами обработки акустических сигналов ряда распределенных в пространстве датчиков с использованием направления распространения акустических сигналов вдоль продольной оси трубы. Могут быть использованы различные методы обработки сигналов для определения скорости звука. Данные о скорости звука поступают в логическое устройство, в котором вычисляется процентное содержание смеси, например содержание воды, или любой другой параметр смеси или текучей среды, который связан со скоростью звука. В логическом устройстве также может определяться число Маха текучей среды. Технический результат: повышение функциональных возможностей устройства и повышение информативности способа измерения параметров текучих сред в трубе. 2 н. и 34 з.п. ф-лы, 41 ил.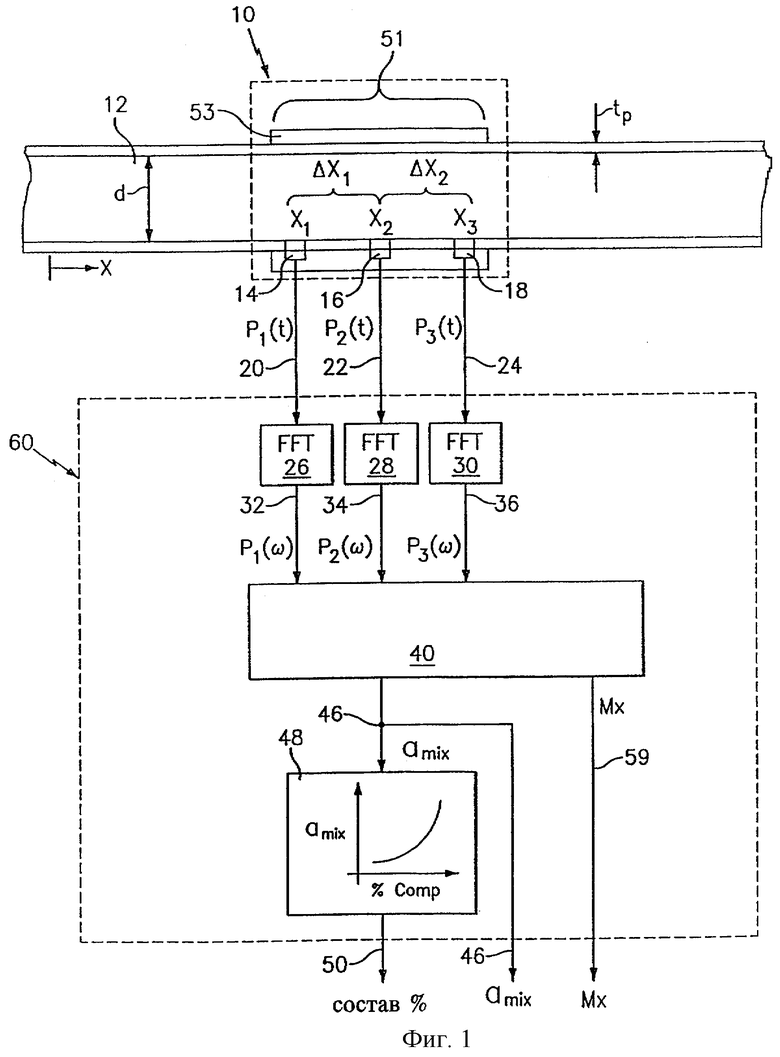



где А, В - амплитуды представленных в частотной области сигналов, х - координата осевого положения датчика давления вдоль трубы, t - время, ω - частота, a kr, kl - волновые числа.
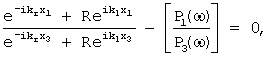
где 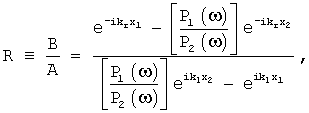
где 
где amix является скоростью звука в смеси в трубе, ω является частотой (рад/с), а Мх является осевым числом Маха потока смеси внутри трубы:

где Vmix является осевой скоростью смеси, a P1(ω), P2(ω), Р3(ω) являются сигналами в частотной области для каждого из упомянутых сигналов акустического давления.

где P12=P1(ω)/P2(ω), Р13=Р1(ω)/P3(ω), i является квадратным корнем из -1, Δx является расстоянием по оси между датчиками, amix является скоростью звука в смеси в трубе, ω является частотой (рад/с), a P1(ω), Р2(ω), Р3(ω) являются сигналами в частотной области для каждого из упомянутых сигналов акустического давления.
где amix является скоростью звука в смеси в трубе, ω является частотой (рад/с), Δх является расстоянием по оси между датчиками, a P1(ω), P2(ω), Р3(ω) являются сигналами в частотной области для каждого из упомянутых сигналов акустического давления.
где a1, a2 являются известными скоростями звука, ρ1, ρ2 являются известными плотностями, h1, h2 являются объемными частями двух соответствующих текучих сред, а аmix является скоростью звука в смеси.
где А, В - амплитуды представленных в частотной области сигналов, х - координата осевого положения датчика давления вдоль трубы, t - время, ω - частота, a kr, kl - волновые числа.
где 
где 
где amix является скоростью звука через смесь в трубе, ω является частотой (рад/с), а Мх является осевым числом Маха потока смеси внутри трубы:
где Vmix является осевой скоростью смеси, a P1(ω), Р2(ω), Р3(ω) являются сигналами в частотной области для каждого из упомянутых сигналов акустического давления.

где P12=P1(ω)/P2(ω), P13=Р1(ω)/Р3(ω), i является корнем квадратным из -1, Δx является расстоянием по оси между датчиками, аmix является скоростью звука в смеси в трубе, ω является частотой (рад/с), a P1(ω), P2(ω), Р3(ω) являются сигналами в частотной области для каждого из упомянутых акустических давлений.
где amix является скоростью звука через смесь в трубе, ω является частотой (рад/с), Δх является расстоянием по оси между упомянутыми положениями измерения, a P1(ω), P2(ω), Р3(ω) являются сигналами в частотной области для каждого из упомянутых сигналов акустических давлений.
где a1, a2 являются известными скоростями звука, ρ1, ρ2 являются известными плотностями, h1, h2 являются объемными частями двух соответствующих текучих сред, a amix является скоростью звука в смеси.
Приоритет по пунктам:
| US 4896540 А, 30.01.1990 | |||
| US 5152181 А, 06.10.1992 | |||
| УЛЬТРАЗВУКОВОЙ РАСХОДОМЕР | 1997 |
|
RU2106603C1 |
| УЛЬТРАЗВУКОВОЙ УРОВНЕМЕР | 1995 |
|
RU2083957C1 |

