Изобретение относится к области систем данных флюидов, и, в частности, к системе гидродинамических аэронавигационных данных для использования в самолетах и т.п. аппаратах.
Обычная самолетная система воздушных параметров использует трубки Пито, которые измеряют как динамическое, так и статическое давление, и по нему вычисляют калиброванную воздушную скорость, число М, и барометрическое давление высоты. Исходя из того, что скорость звука есть функция только квадратного корня абсолютной температуры, для ее вычисления нужно только измерить температуру по датчику. На основании числа М и вычисленной скорости звука можно вычислить истинную воздушную скорость. Но трубки Пито должны выступать из фюзеляжа самолета. Поэтому они будут увеличивать радиолокационное сечение. На таких малозаметных самолетах, как F-117A, придание трубкам Пито пространственных форм наряду с применением дорогих "радаро-поглощающих" покрытий используют для понижения радиолокационного сечения до приемлемых уровней. Трубки Пито должны также содержать нагреватели, чтобы избежать обледенения входных отверстий. При полете на очень больших скоростях, таких, например, когда космический корабль многоразового использования входит в плотные слои атмосферы, трубки Пито убирают внутрь, чтобы предотвратить повреждения от интенсивного аэродинамического нагрева, и таким образом они находятся в убранном положении до снижения скорости до приблизительно М 3. Для осуществления этих измерений разработаны установленные заподлицо системы, работа которых основана на использовании лазеров, но эти системы и дороги и тяжеловесны.
Еще одним очень важным измеряемым параметром, необходимым для управления самолетом, является угол между продольной осью самолета и относительным набегающим потоком (угол атаки, угол скольжения). Обычная система измерения этих углов использует внешний зонд. Этот зонд содержит четыре отверстия измерения давления, расположенные по окружности на равном расстоянии от него; два отверстия соосны с вертикальной осью для измерения угла атаки, а два других соосны с горизонтальной осью для измерения рыскания. Когда самолет находится под каким-либо углом по отношению к набегающему потоку, то измерения давления, полученные двумя соосными отверстиями, будут разными. Разумеется, эта разница будет пропорциональна углу атаки или углу скольжения. Но очевидно, что этот зонд имеет те же недостатки, что и трубка Пито.
Активные акустические системы аэронавигационных данных, которые обеспечивают данными о скорости полета и угле атаки, также хорошо известны из имеющегося уровня техники. Большинство их основывается на том принципе, что время распространения звуковых волн в текучей среде по данной траектории есть функция суммы локальной акустической скорости, плюс локальная составляющая вектора скорости текучей среды, параллельная этой траектории. Если вектор скорости текучей среды проходит в том же направлении, что и направление распространения звуковой волны, то время распространения звуковой волны между двумя точками данного разложения является минимальным. Аналогично, если скорость текучей среды имеет направление, противоположное направлению распространения звуковой волны, то время распространения звуковой волны между двумя точками является максимальным. Соответственно, если звуковые волны распространяются в текучей среде по множеству непараллельных траекторий, и при этом каждая траектория имеет одинаковую длину и компланарна с каждой другой траекторией и с направлением измеряемого вектора скорости текучей среды, то время распространения звуковых волн по каждой траектории будет изменяться в соответствии с вектором скорости и направлением текучей среды, т. е. величиной составляющей вектора скорости жидкой среды вдоль каждой траектории. Но все эти системы основываются на концепции прохождения акустического сигнала (звуковые волны) посредством электромеханического преобразователя (напр., источник звука) через текучую среду к одному или более приемному устройству и измерении времени прохождения к каждому приемному устройству в ряду, дальше по ходу потока.
Пример такой системы дает Патент США N 3379060 "Измеритель Воздушного Потока", К. Б. Пиэр, Мл. Здесь первый электроакустический преобразователь обеспечивают для передачи звукового импульса по множеству непараллельных траекторий, которые являются компланарными с направлением измеряемого вектора скорости текучей среды. Множество вторых электроакустических преобразователей, по одному для каждой траектории, располагают концентрически вокруг первого преобразователя и вдоль множества траекторий для приема звукового импульса, переданного первым преобразователем. С каждым принимающим преобразователем связано средство индикации, которое приводят в действие, когда поступает звуковой импульс. Также обеспечивают логическую схему, в результате чего, когда импульс принимают одним из приемных преобразователей, в действие приводится только его индикатор, а действие всех других индикаторов блокируется до возврата в исходное положение логической схемы. Поскольку будет только одна траектория, по существу параллельная направлению вектора скорости потока текучей среды, то относящийся к этой траектории приемный преобразователь будет принимать звуковой импульс до его приема каким-либо другим приемным преобразователем, приводя при этом в действие свое средство индикации, чтобы исключить действие всех других средств индикации. Измерение направления потока текучей среды получают, исходя из того, какое средство индикации приведено в действие.
Для определения скорости текучей среды первый принятый звуковой импульс используют для генерации нового импульса, который возбуждает передающий преобразователь после заданной фиксированной задержки, достаточной, чтобы предшествующий звуковой импульс смог достичь всех приемных преобразователей во всех возможных погодных условиях. При таковом возбуждении передающего преобразователя скорость повторения импульсов будет функцией минимального времени распространения звукового импульса, проходящего от передающего преобразователя к одному из множества приемных преобразователей; и это время, разумеется, прямо зависит от скорости текучей среды и скорости звука. Скорость потока текучей среды получают непосредственным измерением разницы минимального времени поступления импульса между акустическим источником и приемным преобразователем по ходу движения.
В Патенте США N 4143548 "Измерение скорости самолета" Э. Грэв и др. непрерывный передатчик ультразвуковой волны передает модулированные волны в двух противоположных направлениях, которые перехватывают носовым приемным устройством и кормовым приемным устройством. Разность фаз между сигналом передатчика и сигналами приемного устройства используют для вычисления разностей времени прохождения, из которых принимаемые сигналы демодулируют, а относительную фазу используют для подсчета скорости самолета. He-нулевой угол между продольной осью самолета и фактическим направлением распространения можно компенсировать включением двух размещенных под прямым углом приемных устройств для получения вектора скорости (угол атаки).
Третий способ раскрывают в Патенте США N 4112756 "Система ультразвуковых воздушных параметров", П. Х.Б. Мак-Леннан и др. Эта система ультразвуковых воздушных параметров определяет относительную скорость самолета относительно среды в одном, двух или трех направлениях. Помимо этого она может определять скорость звука и приблизительную температуру. В системе одного направления первый ультразвуковой преобразователь передает импульс во второй преобразователь, где он детектируется и отражается назад к первому преобразователю и снова отражается ко второму преобразователю. Определяются величины времени прохождения импульса для каждого направления, а относительная скорость, скорость звука и приблизительная температура получаются как функция времени прохождения. В системах двух или трех направлений три или четыре преобразователя помещают в двух- или трехмерной конфигурации. В первом полуцикле первый преобразователь передает импульс второму преобразователю, где его отражают к третьему или последнему преобразователю в двухмерной системе, и затем к последнему преобразователю в трехмерной системе. Во втором полуцикле последний преобразователь передает импульс, который отражается через систему преобразователей первому преобразователю. Определяются величины времени прохождения импульса в каждом направлении между парами преобразователей, а относительные скорости, скорость звука и приблизительная температура получаются как функция этих величин времени прохождения.
Во всех трех упомянутых выше системах требуется ультразвуковой преобразователь или "громкоговоритель". Для всех указываемых ниже акустических систем требуются ультразвуковые преобразователи или "громкоговорители": патент США N 4708021 "Устройство для бесконтактного измерения скорости подвижной среды", Х. Браун и др., патент США N 5040415 "Автономная система индикации направления потока" С. Бархудариан, патент США N 4484478 "Метод и средство для измерения скорости суспензионного потока с помощью ультразвуковой техники", Э. Харконен, патент США N 4112756 "Система ультразвуковых воздушных параметров" П. Барри и др., патент США N 4995267 "Способ контроля состояния удлиненного объекта и устройство для осуществления этого способа" С.Михеев и др. , патент США N 4351188 "Способ и устройство для дистанционного измерения направления воздушного потока и скорости в атмосфере" М. Фукусима и др., патент США N 4831874 "Система измерения воздушного потока "Парадак" С. Добен и др., патент США N 4468961 "Измеритель направления текучей среды для измерителя угла атаки для самолета" Л. Берг, патент США N 4611496 "Ультразвуковой расходомер" Т. Комачи, патент США N 3548653 "Устройство для определения направления и скорости" В. Коури, патент США N 4576047 "Устройство для определения времени прохождения ультразвуковых импульсов в текучей среде" Р. Лауэр и др., патент США N 4174630 "Ультразвуковой анемометр" Дж. Николи, патент США N 3693433 "Ультразвуковой анемомент" Й. Кобори и др., и патент США N 4043194 "Система предупреждения сдвига воздушного потока" Дж. Таннер.
Таким образом, одной из основных задач данного изобретения является создание системы гидродинамических данных для такого летательного аппарата, как самолет и т.п., которая выполнена заподлицо с поверхностью аппарата.
Другой основной задачей данного изобретения является создание системы гидродинамических аэронавигационных данных для такого летательного аппарата, как самолет и т.п.
Еще одна задача данного изобретения заключается в создании акустической системы аэронавигационных данных для такого летательного аппарата, как самолет и т.п., который использует только пассивные акустические датчики.
И еще одна задача данного изобретения заключается в создании системы гидродинамических аэронавигационных данных для такого летательного аппарата как самолет и т.п., которая может обеспечить истинные данные скорости воздушного потока, числа М, абсолютной температуры, барометрической высоты и угла атаки.
Поставленные задачи решаются тем, что в системе для определения характеристик набегающего на поверхность транспортного средства потока текучей среды, содержащей, по меньшей мере, один первый датчик динамического давления и, по меньшей мере, один ряд вторых датчиков динамического давления, установленных по ходу потока за первым датчиком динамического давления, согласно изобретению в качестве датчиков динамического давления используются акустические датчики, установленные на поверхности транспортного средства, заподлицо с поверхностью, и предназначенные для восприятия колебаний давления, возникающих в турбулентном граничном слое потока текучей среды, и обеспечения первых и вторых выходных сигналов, характеризующих колебания давления, проходящие от, по меньшей мере, одного первого датчика ко вторым датчикам, по меньшей мере, одного ряда, система содержит средство для приема первых и вторых выходных сигналов, определения времени распространения колебаний, измеренных в течение дискретного периода времени, от первого датчика к каждому второму датчику ряда и вычисления скорости конвекции колебаний давления в турбулентном граничном слое потока текучей среды.
Система согласно изобретению дополнительно может содержать средство для приема первых и вторых выходных сигналов и вычисления углового направления потока текучей среды относительно оси транспортного средства.
Система согласно изобретению дополнительно может содержать средство для приема первых и вторых выходных сигналов и вычисления скорости свободного потока текучей среды вдоль поверхности транспортного средства.
Система согласно изобретению дополнительно может содержать чувствительное к температуре средство для измерения температуры текучей среды и получения пропорционального температуре третьего выходного сигнала и средство для приема третьего выходного сигнала и вычисления скорости звука в текучей среде.
Система согласно изобретению дополнительно может содержать воспринимающее статическое давление средство для измерения статического давления текучей среды и получения пропорционального статическому давлению четвертого выходного сигнала и средство для приема четвертого выходного сигнала и вычисления барометрического давления высоты.
Система согласно изобретению может содержать средство для вычисления числа Маха свободного потока текучей среды.
Поставленные задачи решаются также тем, что в системе для определения характеристик набегающего на поверхность потока текучей среды, содержащей, по меньшей мере, один первый датчик динамического давления и, по меньшей мере, один второй датчик или один ряд вторых датчиков динамического давления, установленных по ходу потока за первым датчиком динамического давления, согласно изобретению, в качестве датчиков динамического давления используются акустические датчики, установленные на поверхности и предназначенные для восприятия колебаний давления, возникающих в турбулентном граничном слое потока текучей среды, и обеспечения первых и вторых выходных сигналов, характеризующих колебания давления, проходящие от, по меньшей мере, одного первого датчика к, по меньшей мере, одному, второму датчику или ко вторым датчикам, по меньшей мере, одного ряда, система содержит средство для приема первых и вторых выходных сигналов, определения времени распространения колебаний, измеренных в течение дискретного периода времени, от первого датчика ко второму датчику или к каждому второму датчику и вычисления скорости конвекции колебаний давления в турбулентном граничном слое потока текучей среды.
Система согласно изобретению дополнительно может содержать средство для приема первых и вторых выходных сигналов и вычисления скорости свободного потока текучей среды вдоль поверхности.
Система согласно изобретению для определения характеристик потока текучей среды, ограниченной каналом, трубопроводом или аналогичным устройством, может содержать только один первый датчик динамического давления и только один второй датчик динамического давления.
Далее описан пример выполнения системы согласно изобретению со ссылкой на прилагаемые чертежи.
Фиг. 1 - часть вида самолета в перспективе с изображением местоположения системы гидродинамических аэронавигационных данных.
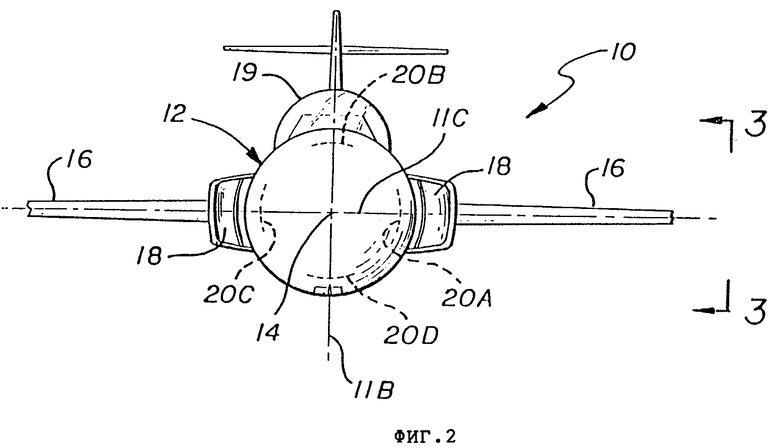
Фиг. 2 - вид спереди самолета, показанного на фиг.1, также с изображением местоположения системы гидродинамических аэронавигационных данных.
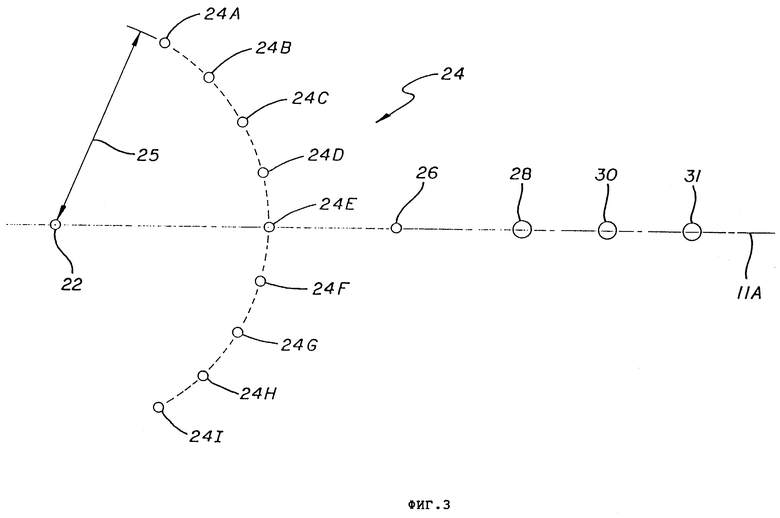
Фиг. 3 - часть вида сбоку самолета, показанного на фиг. 2, в направлении стрелки 3 с конкретным изображением одной из систем гидродинамических аэронавигационных данных.
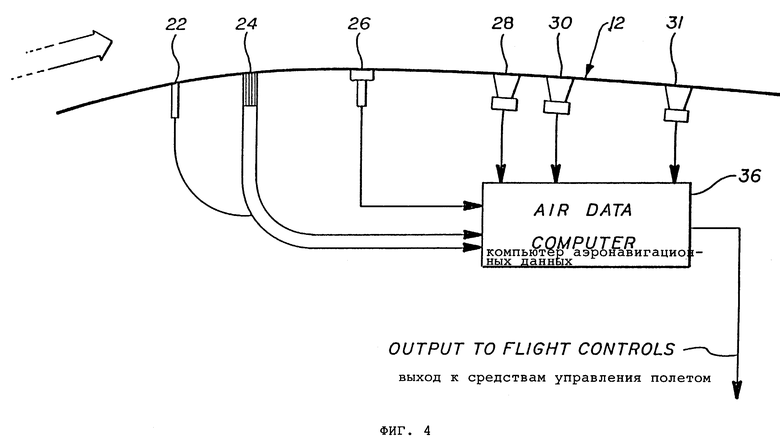
Фиг. 4 - схематическое изображение системы гидродинамических аэронавигационных данных.
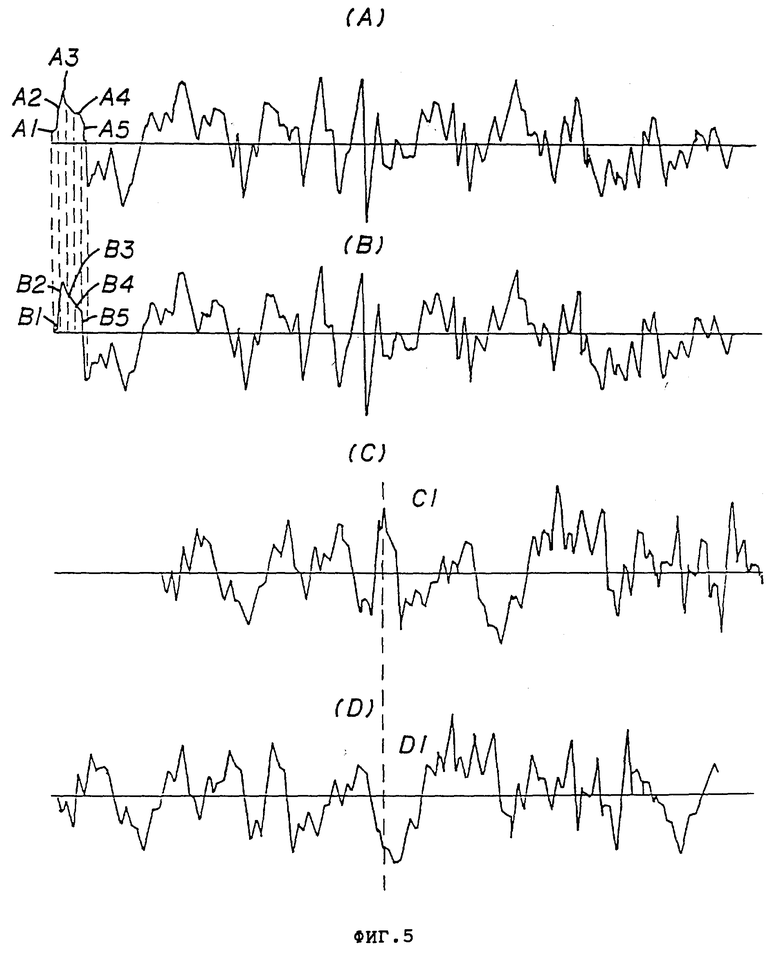
Фиг. 5 - график, изображающий методологию автокорреляции.
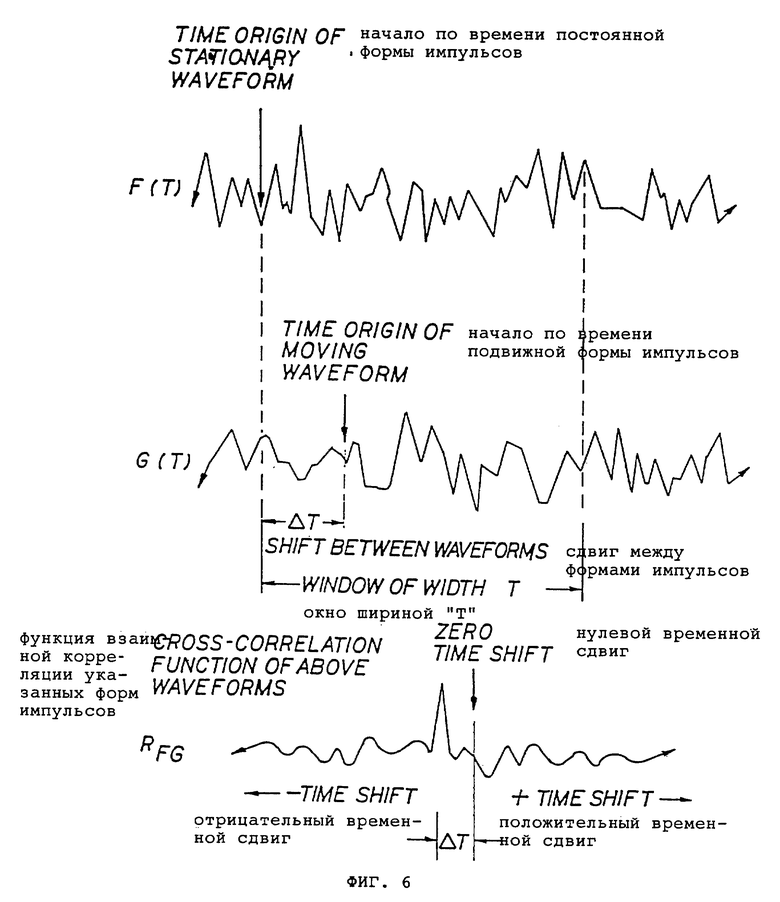
Фиг. 6 - график, изображающий методологию взаимной корреляции.
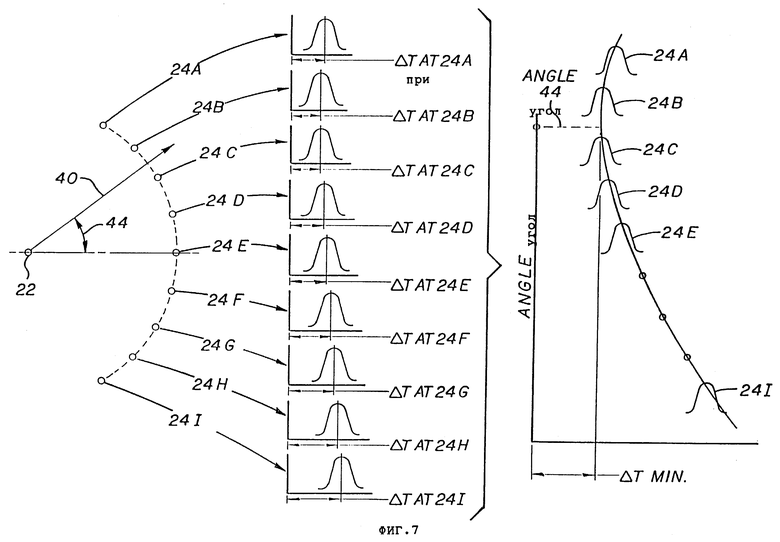
Фиг. 7 - иллюстративное представление способа вычисления значений времени прохождения сигнала между опорным микрофоном и микрофонами ряда и его угла относительно оси.
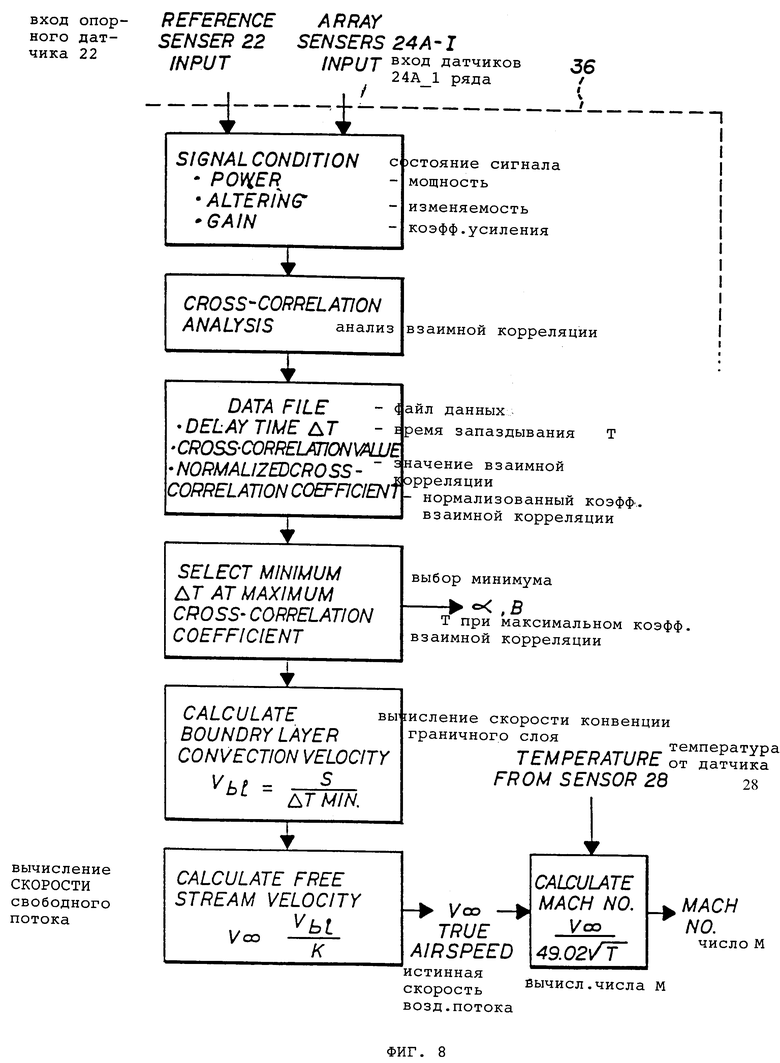
Фиг. 8 - блок-схема компьютерной программы для вычисления скорости, угла атаки или рыскания и числа М.
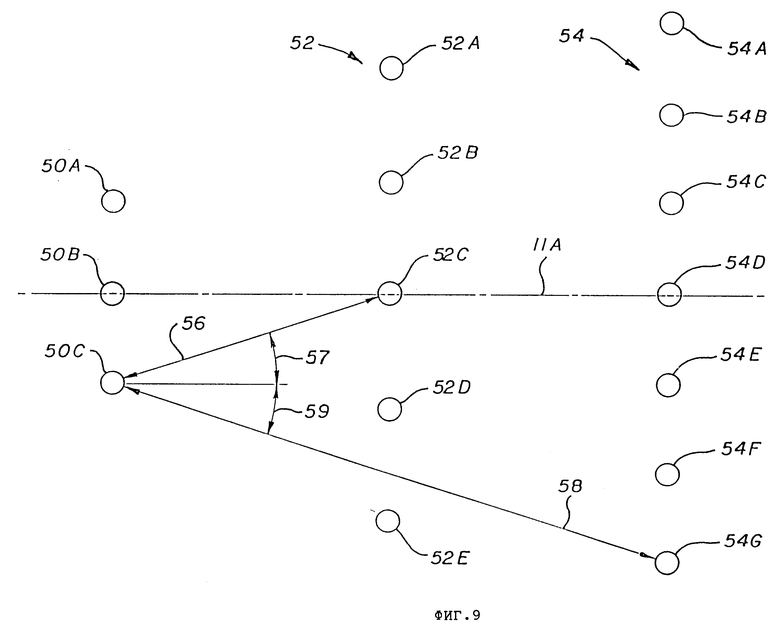
Фиг. 9 - вид, аналогичный фиг. 3, изображающий вариант выполнения данного изобретения с помощью множества первых датчиков и множества рядов вторых датчиков.
Часть вида самолета представлена на фиг. 1-4, где самолет в общем обозначен цифрой 10 и имеет продольную ось 11А, вертикальную ось 11В и боковую ось 11С. Самолет 10 содержит фюзеляж 12, имеющий носовую часть 14, крылья 16, воздухозаборные отверстия 18 мотора и кабину 19. Четыре системы гидродинамических аэронавигационных данных 20A-20D устанавливают на фюзеляже 12 вблизи носовой части 14. Система 20А содержит первый гидродинамический датчик 22 (микрофон) и ряд 24 вторых гидродинамических датчиков 24А-1, установленных по дуге позади датчика 22 на одинаковом от него расстоянии 25. Со гласно иллюстрации гидродинамический датчик 22 расположен на продольной оси 11А с определенным числом вторых гидродинамических датчиков 24А-1, равномерно распределенных по обеим сторонам, а второй гидродинамический датчик 24Е расположен на оси 11А. На продольной оси позади ряда 24 устанавливают датчик 26 статического давления, пассивный радиометр 28 для измерения температуры окружающей среды и пассивный радиометр 30 для измерения содержания паров воды и анемометр 31 смоченного шарика или аналогичный прибор для измерения температуры точки росы. Систему 20С гидродинамических аэронавигационных данных давления устанавливают на противоположной стороне самолета в аналогичном порядке; при этом системы 20B и 20D аэронавигационных данных с датчиком гидродинамического давления устанавливают под углом в 90 o к ним, причем датчик 22 и ряд 24 соотносят с вертикальной осью 11В самолета. Следует отметить, что местоположение, число датчиков в ряду 24 может изменяться в зависимости от конструкционных потребностей конкретного самолета, а изображенное конкретное размещение дано только для иллюстрации. Первый датчик 22 и все датчики ряда 24, датчик 26 давления, радиометры 28 и 30 и анемометр 31.
Пассивный заход на посадку включает в себя использование анализа взаимной корреляции для определения запаздывания по времени или задержки между возбуждением и ответной реакцией. Возбудителем являются колебания давления конвектированного турбулентного граничного слоя в опорном датчике 22, а ответной реакцией является колебание давления, принятое каждым из датчиков 24А-1 ряда 24.
Хорошим способом измерения подобия между двумя формами волновых импульсов является их перемножение, ординаты на ординату, и суммирование произведений в течение продолжительности форм волновых импульсов (взаимная корреляция). Для определения подобия между формами импульсов a и b фиг. 5 умножают ординаты a1 на b1, a2 на b2, и так далее, и суммируют эти произведения для получения одного числа, которое является степенью подобия. Это можно делать либо с непрерывными сигналами, либо с выбранными сигналами. На фиг. 5 формы импульсов A и B идентичны, поэтому каждое произведение дает в их сумму положительный член. Сумма поэтому велика и ее определяют как автокорреляцию. Но если этот же процесс выполнять по сигналам a и b, которые не идентичны, то обнаруживается, что каждое положительное произведение сокращается отрицательным произведением; поэтому сумма является малой, а формы импульсов являются отличающимися друг от друга.
Рассмотрим формы импульсов c и d. Они идентичны по форме, но смещены по времени. Если выполнять процесс перемножения ординат (в которых c1 и d1 типичны), то снова обнаруживается, что каждое положительное произведение сокращается отрицательным произведением, и что сумма мала. Таким образом, если вычерчивать подобие между формой импульса типа "а" и его смещенным по времени вариантом, то можно ожидать, что полученная таким образом функция будет принимать малые значения для значительных сдвигов по времени и увеличиваться до крупной положительной максимальной величины при нулевом сдвиге по времени. Это является функцией автокорреляции широкополосного произвольного сигнала, используемой в примере фиг. 5. Синусоидальная волна становится идентичной сама себе всякий раз, когда сдвиг по времени является целым числом периодов, и таким образом функция автокорреляции сама является периодической. Но с широкополосным произвольным шумом очень малый сдвиг по времени достаточен для нарушения подобия, и подобие никогда не возвращается. Таким образом, функция автоколлеряции является импульсом с крутым фронтом, который быстро затухает от центрального максимума при нулевом сдвиге по времени до очень низких величин, когда сдвиги по времени становятся большими.
Несмотря на то, что функция автокорреляции относится к подобию между формой импульса и сдвинутым по времени вариантом самой себя, можно применить такое же измерение подобия к случаю двух сигналов, которые не идентичны (взаимная корреляция). На фиг. 6 видно два сигнала через "окно" ширины (2T), и мы оцениваем подобие двух форм импульсов в этом интервале повторяющимся перемножением ординат, суммированием произведений и сдвигом по времени. Нижняя кривая является графиком подобия как функции сдвигов по времени между двумя сигналами. Функция взаимной корреляции двух форм импульсов f(t) и g(t) является графиком подобия между f(t) и задержанным g(t + Δ T) как функции задержки между ними.
На фиг. 4, 7 и 8 с помощью указанной выше методики анализа функцию взаимной корреляции вычисляют из измеренных данных в двух местоположениях датчика (например, датчики 22 и 24А). Это вычисление можно выразить интегралом:
где fr(t)) - измеренные данные в местоположении опорного преобразователя во время t,
fa(t + Δ t)... - измеренные данные в местоположении преобразователя ряда во время t + Δ t.
Нормализованный коэффициент взаимной корреляции получают из функции взаимной корреляции и функции автокорреляции следующим образом:
где  - автокорреляция опорного преобразователя
- автокорреляция опорного преобразователя - автокорреляция преобразователя ряда.
- автокорреляция преобразователя ряда.
Для иллюстрации (фиг. 7) предположим, что скорость потока воздуха указана стрелкой 40 и находится между датчиками 24В и 24С. Компьютер 28 будет непрерывно вычислять значения корреляции, которые хранятся в запоминающем устройстве, в виде функции времени задержки Δ t. "Вычерчивают" значения Δ t для пиковых значений корреляции для датчика 22 и каждого датчика 24А- 1, а расчеты кривой соответствия определяют соответствующий минимум Δ t, который в данном случае попадает между датчиками 24В и 24С. С помощью углового размещения между двумя парами датчиков 22, 24В и 24С определяют фактический угол, обозначенный позицией 44. Когда датчики ряда располагают по дуге и на равном расстоянии от опорного датчика, нормализованный коэффициент взаимной корреляции будет максимумом для пары датчиков, показывающих минимальную Δ t.
Скорость свободного потока (V∞) пропорциональна скорости вихревой конвекции граничного слоя (Vbl). Эта взаимосвязь является функцией местоположения на самолете и также является функцией частного содержания граничного слоя, которое используют в анализе: ,
,
где k изменяется между 0,8 и 0,9 как функция системы. Таким образом, значение постоянной k надо определять экспериментально, либо испытаниями в аэродинамической трубе, либо во время испытательных полетов самолета.
Скорость звука окружающей среды (C∞) описывается следующим уравнением:
где γ - отношение удельных теплоемкостей (1,4 для воздуха),
g - гравитационная постоянная (9,8 м/с2 = 32,176 фут/с2),
R - газовая постоянная (53,3 для воздуха), и
T∞ - абсолютная температура свободного потока (по Ранкину), измеренная радиометром 28 (в спокойной атмосфере).
Таким образом, для воздуха при низкой температуре (т.е. типичной для полета в атмосфере) это уравнение будет иметь следующий вид: ,
,
а число M полета в свободном потоке дается уравнением: .
.
Значения времени прохождения между опорным датчиком и датчиками ряда по ходу потока (отделенных расстоянием S) определяют по пику в вычисленных функциях взаимной корреляции для каждой пары. Минимальная задержка во времени для всех пар идентифицирует и направление потока, и скорость конвекции. Скорость конвекции граничного слоя вычисляют по следующей формуле: ,
,
где S - расстояние 25 между датчиком 22 и рядом 24, изображенным на фиг. 3.
Эти вычисления являются обычными для современных многоканальных анализаторов и выполняются математически обычными средствами программного обеспечения, которыми можно обеспечить системы сбора/анализа. Нужно отметить, что если включить в систему соответствующим образом откалиброванный датчик 26 статического давления, то можно будет получать значение барометрической высоты. При использовании анемометра 30 водяного пара и анемометра 31 смоченного шарика для определения точки росы можно получать информацию для работы системы подавления инверсионного следа.
Нужно отметить, что данное изобретение не ограничивается наличием одного опорного датчика на оси 11А и датчиком ряда 24, расположенными от него на одинаковом расстоянии. Датчики в ряду 24 не обязательно должны размещаться через равные интервалы на той или иной стороне оси 11А. На фиг. 9 множество опорных датчиков 50А-С, В и С используют так же как несколько рядов 52А-Е и 55A-G. Это требует, чтобы уравнения учитывали разницу расстояния между каждым датчиком рядов 50A-C рядов 52А-Е и 54A-G. Но для современных компьютеров это пока не трудная задача. Преимущество этой концепции заключается в том, что необходимую избыточность получают с помощью единой системы.
Несмотря на то, что предпочтительный вариант выполнения относится к системе аэронавигационных данных для самолета, очевидно, что его можно применять для наземных транспортных средств и также кораблей, и даже подводных лодок. Помимо этого его также можно использовать для измерения потока газа или жидкости в трубопроводах и каналах. В отношении последней области применения - трубопроводы и каналы - угол потока всегда известен и нужно только определить скорость потока. Поэтому для этой области применения будет требоваться, как минимум, только один первый датчик динамического давления и один датчик динамического давления в ряду вторых датчиков; причем оба датчика соосны с траекторией потока в трубе или канале.
Несмотря на то, что данное изобретение изложено со ссылкой на конкретные варианты осуществления, подразумевается, что эти варианты являются только иллюстративными, поскольку специалисты могут произвести в нем многочисленные изменения и модификации. Поэтому данное изобретение должно истолковываться как ограничивающееся только рамками прилагаемой формулы изобретения.
Промышленная применимость
Данное изобретение применимо для авиационно-космической техники и судоходства.
Изобретение относится к системе для определения характеристик набегающего на поверхность транспортного средства потока текучей среды. Система содержит по меньшей мере один первый датчик давления для приема сигналов динамического давления, генерированных конвектированным граничным слоем потока текучей среды. По меньшей мере один ряд вторых датчиков давления устанавливают за первым датчиком давления. В качестве датчиков динамического давления используют акустические датчики. Датчики устанавливают на поверхности транспортного средства заподлицо с поверхностью. Система содержит средство для приема первых и вторых выходных сигналов, определения времени распространения колебаний от первого датчика к каждому второму датчику ряда и вычисления скорости конвекции колебаний давления. Система обеспечивает истинные данные скорости воздушного потока, числа М, абсолютной температуры, барометрической высоты и угла атаки. 2 с. и 7 з.п.ф-лы, 9 ил.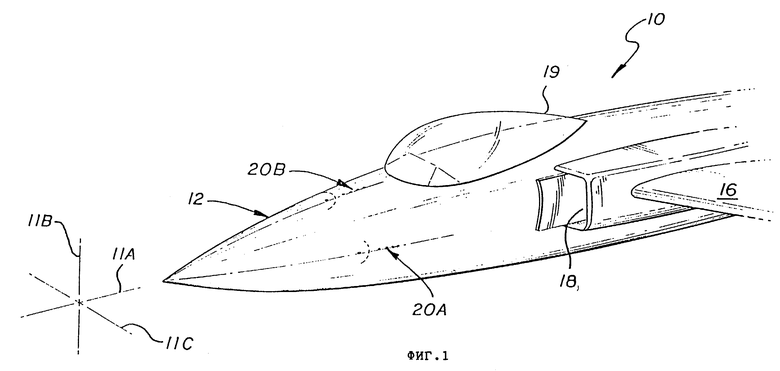
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| EP 0 496 156 A2, 29.07.1992 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

