Изобретение относится к системам оптической навигации и может быть использовано для обеспечения посадки самолетов и вертолетов на палубу авианесущего корабля и малоразмерные аэродромы.
В посадке на авианосец как наиболее важной стороне использования данное устройство будет рассмотрено ниже.
Посадочные системы лучевого, типа, например "Flols" (США), "Луна-3" (Россия) отображают для восприятия летчиком во время захода для посадки на палубу авианосца только один параметр, а именно текущее значение вертикальной погрешности в траектории движения самолета, то есть величину отклонения по высоте от номинальной оси глиссады снижения. В состав посадочной системы входят пять расположенных по вертикали источников светового излучения - указательных огней (Фиг.3, ил.7, 8). Эти источники размещены между двумя горизонтальными рядами огней, образующих так называемые базовые (эталонные) линии (Фиг.3 ил.9, 10). Система линз источников светового излучения выполнена таким образом, что летчик воспринимает виртуальное изображение в форме одного огня, удаленного на некотором расстоянии по горизонту от базовых линий. Этот указательный огонь, получивший распространенное название "шар", виден летчику через центральную линзу на уровне базовых линий когда самолет находится точно на оси глиссады снижения. При отклонениях самолета вверх или вниз от оси посадочной глиссады оптика посадочной системы имитирует вертикальные смещения светящегося "шара" соответственно вверх или вниз относительно базовых линий. При заходе для посадки на палубу авианосца летчик старается выдержать положение самолета точно на оси глиссады, которая обычно имеет угол наклона 3,5-4,0° к плоскости горизонта. Для этого летчик должен выдерживать режим снижения таким образом, чтобы "шар" постоянно находился на уровне базовых линий. Проблема заключается в том, что при приближении к посадочной системе информация о вертикальных смещениях самолета относительно глиссады, отображаемая указательными огнями лучевой посадочной системы, хотя и является полезной для выдерживания режима снижения по глиссаде, но не может считаться оптимальной из-за ее малой чувствительности, что приводит к низкой точности посадок на палубу.
Поскольку информация от смещения "шара" имеет только данные о том, какова величина отклонения самолета от глиссады, то от момента ошибочного отклонения органа управления самолетом и до момента, когда окажется возможным восприятие летчиком сведений о последствиях допущенной ошибки, должно пройти определенное время, которое может рассматриваться как запаздывание показаний посадочной системы "Flols". Запаздывания являются внутренне присущим качеством любой системы, в которой погрешность по скорости (производная первого порядка) должна накапливаться в течение некоторого времени для того, чтобы появилась заметная величина погрешности по позиционному параметру (величина нулевого порядка). При пилотировании самолета летчик осуществляет управление, главным образом, по параметру первой производной от высоты полета, то есть вертикальной скорости самолета, а не по высоте полета. В таких действиях летчик мог бы исправлять ошибки в выдерживании вертикальной скорости, не дожидаясь, пока возникнет заметная погрешность в выдерживании заданной высоты полета. Для этого нужно, чтобы летчик мог знать о допущенной им ошибке по параметру вертикальной скорости. Именно эту задачу решает паравизуальный индикатор отклонения движения.
Известен оптический маяк визуальной посадки по глиссаде (патент США 4064424 B 64 F 1/20, 1977 г.), в котором с помощью ламповых источников света в вертикальной плоскости формируются прилегающие друг к другу световые зоны разных цветов, при этом правильному полету по глиссаде соответствует нахождение самолета в центральной по вертикали угловой зоне зеленого цвета. Недостатком этой конструкции является низкая информативность из-за отсутствия горизонтальной базовой отметки (огней), указывающей положение заданной глиссады самолета по высоте в центре зоны и отклонение от нее (на краю или в середине...) (Фиг.3 ил.9, 10), что снижает точность посадки и ее безопасность при действии качки корабля.
Наиболее близким аналогом предлагаемого изобретения следует признать оптическую систему посадки самолета на палубу авианосца (патент США 4414532 G 08 G 5/00; D 64 F 1/20, 1983 г.), содержащую линейку горизонтальных базовых огней одного цвета, в центре которой расположена линейка из пяти вертикальных узконаправленных огней. Каждый огонь вертикальной линейки виден в определенном вертикальном угле (обычно равном ~ 9-9,5 угловых минут), причем края угловых зон соседних двух огней соприкасаются друг с другом, не пересекаясь, и создают непрерывное видимое вертикальное поле из пяти указательных зон суммарным угловым размером 51'-52 угловых минут. При перемещении самолета в вертикальной плоскости летчик наблюдает по смене зон перемещение светового вымпела соответственно выше или ниже уровня базовых горизонтальных огней и старается выдерживать его на уровне базовых огней.
Для увеличения точности захода на посадку в ближней зоне (в диапазоне Д≈500-100 м до расчетной точки посадки) к указанной выше индикации добавлена дополнительная индикация на 4-х дополнительных вертикальных линейках, расположенных по обе стороны, от основной вертикальной линейки с указательными огнями, - две линейки одного цвета выше горизонтальной базовой линии и две - другого цвета ниже базовой линии. Эти линейки обеспечивают летчику представление о величине и направлении перемещения самолета относительно намеченной глиссады по высоте внутри центрального указательного огня в ближней зоне между самолетом и авианосцем (Д≈500-100 м).
Недостатком прототипа является сложность вычислительной системы для формирования сигнала индикации на указанные 4 линейки, куда входят радиолокатор, процессор, дисплей, блок управления огнями и собственно линейки. Кроме того, радиолокатор подвержен влиянию помех, что делает всю систему непомехоустойчивой и снижает скрытность привода самолета на посадку на авианосец. Большое число элементов в схеме снижает надежность системы. Структура индикации сигнала ошибки положения самолета для летчика является неоднозначной, что снижает эффективность дополнительной индикации и в целом работы системы. Кроме того, так как радиолокатор системы обслуживает только один самолет на глиссаде снижения, то невозможен одновременный заход сразу нескольких самолетов.
Предметом данного изобретения является разработка конструкции оптического навигационного устройства, обеспечивающего такое визуальное представление информации при наведении самолета на наиболее ответственном конечном этапе захода на посадку на палубу (Д≈500-100 м), которое наиболее точно обеспечивает восприятие относительных величин направления перемещения самолета и скорости отклонения от заданной глиссады снижения: практически без запаздывания, без ограничения количества заходящих на посадку самолетов, без использования радиолокационных и других электронно-вычислительных средств, подверженных воздействию помех и снижающих надежность системы.
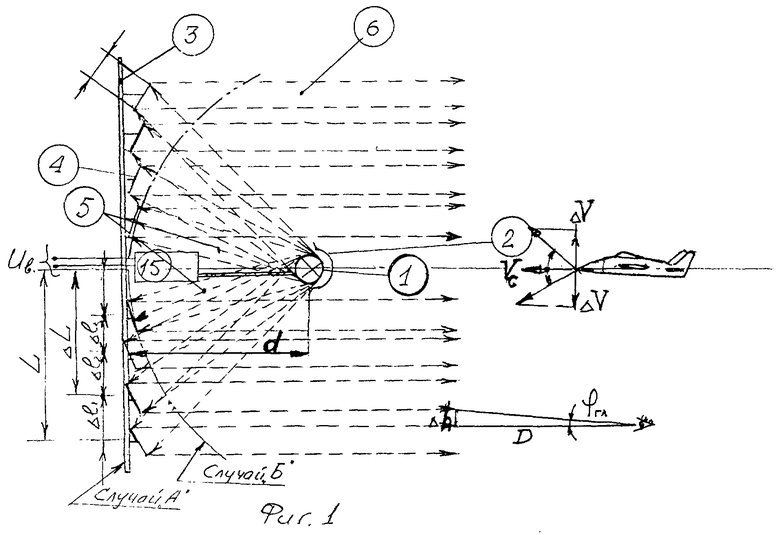
Устройство содержит раму с линейками и отражательными элементами на них (Фиг.1, 2 ил.3), на некотором расстоянии "d" спереди от центральной части которой расположен источник светового излучения (Фиг.1, 2 ил.1). Расстояние его от линеек выбрано таким образом, чтобы световой поток от источника без затенения попадал на отражающие устройства (Фиг.1, 2 ил.4), расположенные на раме по обе стороны от источника светового излучения. Отражающие устройства так ориентированы относительно источника светового излучения, что отраженные (Фиг.1, 2 ил.6) пучки света от каждого отражателя направлены в сторону движущегося объекта и создают для него указательную визуальную информацию необходимой структуры и чувствительности для организации требуемого для движущегося объекта качества ориентирования (например, для отслеживания смещения в сторону, вверх-вниз или в продольном направлении и т.д.)
При наблюдении за устройством с визуальной структтурой, например, в виде параллельных отраженных лучей (Фиг.1) со стороны прямолинейно движущегося и отклоняющегося в сторону объекта (на Фиг.1 - вверх или вниз) по лучам от отражателей создается прямое восприятие величины линейного отклонения ΔL (Фиг.1) относительно центра рамы устройства (в котором находится затененный со стороны наблюдателя источник света), а также - относительной скорости отклонения по видимости чередования отраженного света от каждого из отражателей.
Если Δln - расстояние между отражателями и Δt - время визуальной смены от одного до соседнего отражателя, то  - есть скорость отклонения - ΔV(Фиг.1).
- есть скорость отклонения - ΔV(Фиг.1).
В сумме, где число отражателей "n" 
Шаг размещения отражательных устройств (расстояние между ними) на раме от источника света, наклон их к источнику света и размер самого отражательного устройства выбираются в зависимости от заданной дальности работы системы с учетом зрительного восприятия летчиками световых делений Δh рамы, в основе расчета которого лежит максимальная острота зрения, но может быть и заданной величиной. Если D требуемая дальность работы с системой и ϕ - острота зрения, то размер распознаваемого деления Δh равен Δh=D·tgϕ.
Суммарная величина участков линейки L с отражающими элементами с обеих сторон от центра может отражать определенные ограничения по позиционному положению (Фиг.1,2). Например, применение устройства как дополнение к визуальной оптической системе лучевого типа (Фиг.3 ил.3, 4, 7, 8) для посадки самолета на палубу в качестве индикатора отклонения в вертикальной плоскости по высоте от заданной глиссады снижения может показывать допустимую зону максимальных отклонений по высоте для разрешенной посадки.
Отражающие элементы могут иметь разную форму поверхности, но, в основном, отраженные лучи света от источника светового излучения в направлении отслеживаемого параметра должны исходить от отражателей узким пучком, который с помощью оптических устройств может быть преобразован в нужные пределы по обзору в горизонтальной или в вертикальной плоскостях.
В качестве отражающих элементов могут быть использованы отражатели различных цветов и с различными коэффициентами отражения, а также - со встроенной системой обогрева. Отражающие элементы должны иметь механизмы регулировки и фиксации их углового положения относительно рамы и источника света.
В качестве источника светового излучения могут быть использованы лампы накаливания, источники "белого" излучения с системой светофильтров, галогенные лампы, полупроводниковые светоизлучающие диоды.
Устройство имеет блок управления со схемой электропитания (Фиг.1 ил. 15), работающий от электросети и с помощью которого дистанционно включается источник светового излучения, и регулируется мощность светового излучения.
Для визуального отслеживания необходимых параметров отклонения движущегося объекта (например, в разных плоскостях) может употребляться одно или несколько устройств одновременно.
Для обоснования введения в формулу разработки вышеприведенных признаков укажем следующее.
Сущность использования заявленной конструкции состоит в создании, в ближней от места установки устройства зоне, возможности информирования движущегося объекта о направлении его движения по сигналам непосредственно воспринимаемого водителем визуального информационного поля, созданного с помощью пучков света от отражателей, размещенных на раме с двух противоположных сторон от ее центра, через который проходит ось симметрии устройства, от которой на некотором расстоянии, со стороны движущего объекта, расположен источник светового излучения, питающий потоком своего излучения (Фиг.1 ил.5) отражающие устройства. Визуальное информационное поле, образованное от засветки того или иного отражающего устройства на раме, дает информацию водителю движущегося объекта о величине относительного отклонения направления объекта от заданного, указываемого центром рамы при движении на нее, и скорости этого отклонения.
Обратим внимание на тот фактор, что при пилотировании самолета летчик, осуществляя управление самолетом по вертикальной скорости самолета, должен знать величину допущенной им ошибки по этому параметру или знать о развитии процесса отклонения от заданной вертикальной скорости (указываемой положением самолета относительно базовых линий в центре устройства) с самого начала без всяких запаздываний. Именно этот процесс отклонения параметра вертикальной скорости от ее номинального значения и передает паравизуальный индикатор: при отклонении движения самолета вверх или вниз от базовой линии соответственно летчиком наблюдается очередная, удаляющаяся от центра устройства засветка от очередного отражателя, видимая в узком угловом секторе вертикальной плоскости.
При этом размер "зайчика" и шаг чередования отражателей выбираются с учетом восприятия индикации в соответствии с выбранным для расчета значением остроты зрения водителей и заданной дальностью начала работы с индикацией. Сигнал индикации о положении самолета и его динамика отклонения создаются прямым визуальным осязанием, без какой-либо организационной промежуточной структуры, и практически без запаздывания, показывая летчику необходимость вмешательства в управление для устранения ошибки. Допустимые пределы погрешности при посадке отображаются на отражающих устройствах путем применения их с разным коэффициентом отражения или разным цветом их отражающей поверхности.
Индикатор движения может применяться как отдельная информационная система (Фиг.2), так и в качестве дополнения к существующим оптическим лучевым системам посадки типа "Flols" (США) и "Луна-3" (Россия) (Фиг.3, 4) и им подобным.
Изобретение отличается от ближайшего аналога тем, что:
а) Для создания указательной символики применены отражательные устройства симметрично расположенные с двух противоположных сторон от единого источника светового излучения; как частный случай может быть применено одностороннее отражательное устройство относительно единого источника светового излучения;
б) Каждый отражательный элемент для создания указательного поля определенной направленности имеет строгую ориентацию по отношению к источнику светового излучения, создавая в сумме визуальную информацию необходимой структуры для обеспечения требуемого качества ориентации движущегося объекта (Фиг.3а);
в) В качестве отражающего устройства может быть использован элемент с плоской или криволинейной поверхностью отражения;
г) В качестве отражающих элементов могут быть использованы отражатели различных цветов, с одинаковыми или разными коэффициентами отражения, со встроенной системой обогрева;
д) В качестве источника светового излучения могут быть использованы лампы накаливания, галогенные лампы, полупроводниковые светоизлучающие диоды различных цветов, а также источники "белого излучения" с системой светофильтров;
е) Устройство на раме имеет шаг установки и размер отражательных элементов, выбранных из условий их зависимости от требуемой дальности работы с устройством и остроты зрения водителя подвижного объекта;
ж) Устройство имеет блок управления, который содержит схему электропитания, схему дистанционного включения и регулировку мощности источника светового излучения.
Фиг.1 показывает работу системы на виде сбоку. Лучи света - иллюстрация 5 (ил.5) - от источника светового излучения (ил.1) падают на отражающие устройства (ил.4), расположенные на раме (ил.3) друг за другом в обе стороны от источника излучения. Отражающие устройства формируют отраженный поток (ил.6), в сумме создавая информационное поле параллельных лучей. Случай "А" - раздельные отражатели; Случай "В" - контур сплошных криволинейных отражателей.
Фиг.2 показывает устройство при виде спереди.
На Фиг.3 показано применение устройства из 2-х линеек "ПИОН" в качестве дополнения к лучевой системе посадки типа "Flols", "Луна-3" и т.д. ил.7 - указательные огни ОСП; ил. 10 - базовые огни ОСП, смонтированные соответственно на рамах ил. 8 и ил. 9.
На Фиг.3а в качестве примера показана возможная структура лучей для управления объектом по дальности приближения к точке наведения, когда из одной точки (объект движения) необходимо видеть одновременно две симметричных разносторонних световых метки.
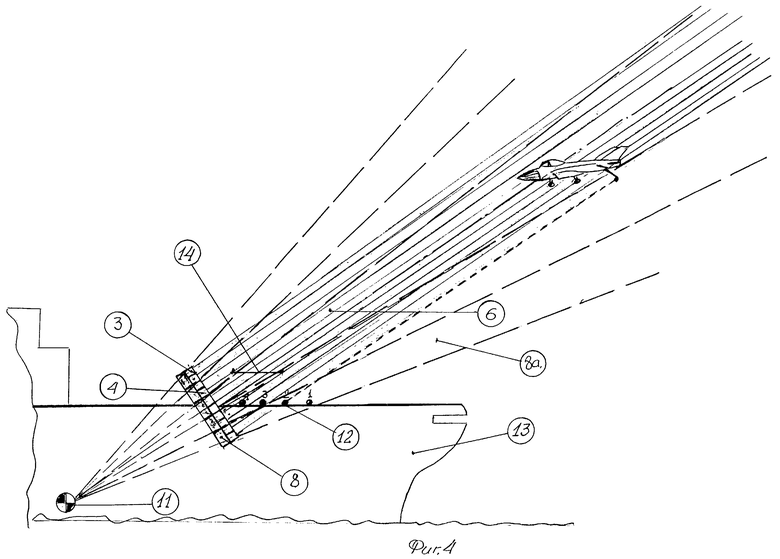
Фиг.4 показывает работу самолета в посадочной системе, устроенной по типу ОСП Луна-3 "ПИОН" (Фиг.3.) Основные лучи (ил.8а) от центральной линейки ОСП (ил.8) работают в дальней зоне корабля; дополнительные линейки ПИОН (ил.3) дают информацию в ближней зоне по лучам (ил.6) от отражателей.
Ил.11 - фокус центральной линейки;
Ил.12 - тросы аэрофинишеров на посадочной палубе корабля (ил. 13);
Ил.14 - зона разрешенного привода самолета на посадку по оптической системе посадки.
Устройство выполнено на следующей элементной базе. В качестве отражающих устройств применяются простые отражатели на жесткой основе, в качестве оптического излучателя применены серийно выпускаемые изделия, имеющиеся в широкой продаже, в схемах блока управления применены также стандартные транзисторы, резисторы, диоды, конденсаторы и катушки индуктивности, крепежные элементы и расходные материалы.
Устройство работает следующим образом.
При подаче питания включается источник светового излучения, от него появляются световые потоки к отражающим элементам, которые, отражая падающий на каждый из них световой поток, преобразуют его в ряд чередующихся отраженных определенно направленных узких световых пучков света, удаляющихся от центра рамы в ту или иную стороны и визуально воспринимаемых наблюдателем при отклонении движения в боковом направлении как последовательные удаления световой отметки от центра рамы в сторону отклонения прямолинейного движения объекта.
Техническим эффектом использования изобретения является возможность формирования более точного и своевременного указания развития погрешности отклонения от заданного параметра движения и незамедлительное принятие мер к устранению этой погрешности, что в сумме обеспечивает более точное управление подвижным объектом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИЧЕСКАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ПАЛУБУ КОРАБЛЯ | 2006 |
|
RU2317233C1 |
| ОПТИЧЕСКАЯ СИСТЕМА ПОСАДКИ | 2000 |
|
RU2208556C2 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ПОСАДКЕ НА ПАЛУБУ КОРАБЛЯ | 1991 |
|
SU1798988A1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА В НОЧНОЕ ВРЕМЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2238882C2 |
| МОДЕЛЬ ОСВЕТИТЕЛЬНОЙ СИСТЕМЫ АЭРОДРОМА ДЛЯ ОБУЧЕНИЯ ПОСАДКЕ | 1992 |
|
RU2042981C1 |
| Восьмицветная растровая оптическая система посадки | 2019 |
|
RU2743602C2 |
| Способ определения координат самолёта при посадке на авианосец и устройство для его осуществления | 2016 |
|
RU2654455C1 |
| КОРАБЕЛЬНАЯ ОПТИЧЕСКАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1993 |
|
RU2083443C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2002 |
|
RU2242052C2 |
| СПОСОБ И УСТРОЙСТВО СТАБИЛИЗАЦИИ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ УКАЗАТЕЛЬНЫХ ОГНЕЙ СИСТЕМЫ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2007 |
|
RU2350517C1 |
Изобретение относится к системам оптической навигации и может быть использовано для обеспечения точной коррекции движения по заданному направлению водителем для привода в малоразмерную зону автотранспортных средств, судов, самолетов и других движущихся объектов, в частности для обеспечения посадки самолетов и вертолетов на малоразмерные аэродромы и палубу авианесущего корабля. Изобретение содержит источник светового излучения, по обе стороны от которого расположены обращенные к нему отражатели, формирующие направленные отраженные разнесенные в пространстве световые лучи, создающие указательную визуальную информацию движущемуся объекту о его ориентации по направлению движения. Изобретение обеспечивает формирование более точного и своевременного указания развития погрешности отклонения от заданного параметра движения и незамедлительное принятие мер к устранению этой погрешности, что в сумме обеспечивает более точное управление подвижным объектом. 10 з.п. ф-лы,5 ил.
Δh=D·tgϕ,
где Δh - световое деление рамы;
D - требуемая дальность работы с устройством;
ϕ - острота зрения летчика (водителя);
| US 4414532 А, 08.11.1983 | |||
| US 4064424 А, 20.12.1977 | |||
| RU 2055785 C1, 10.03.1996 | |||
| RU 94009833 A1, 27.01.1996. |

