Изобретение относится к области авиации, в частности к системам оптической посадки (ОСП) палубных летательных аппаратов (ЛА).
Известна оптическая система посадки FLOLS (Frenel lens optikfllanding system (Басов Ю.Г. Светосигнальные устройства. М.: Транспорт, 1993, с.258), включающая оптический модуль, который состоит из:
линзовой колонки, состоящий из пяти вертикально расположенных одна над другой светотехнических арматур с линзовыми блоками,
пяти красных огней захода на второй круг, расположенных вертикально справа и слева от линзовой колонки,
двенадцати базовых огней, расположенных по шесть в линию с каждой стороны от линзовой колонки на уровне третьего линзового блока,
двух колонок красных огней запрещения посадки.
Линзовый блок имеет приводы по тангажу и крену, позволяющие строить линию посадки относительно горизонта. Выбранный угол наклона системы посадки остается постоянным, несмотря на бортовую и килевую качку авианосца. Четыре верхние светотехнические арматуры создают четыре желтых прожектора, пятый нижний прожектор - красный. ОСП имеет блоки обеспечения работы огней и стабилизации линзовой колонки.
Важными характеристиками системы, определяющими ее качество, является оптические параметры линзовых блоков (параметры луча, его расположение относительно корабельной системы координат), системы стабилизации ее в плоскости горизонта, угол наклона линзовых блоков относительно плоскости горизонта и угол поворота вокруг оси крена. Указанные характеристики должны контролироваться и документироваться как в ходе монтажа системы, так и при ее эксплуатации. Особенно важно иметь данные о соответствии характеристик системы посадки их паспортным значения на момент посадки. В приведенном аналоге не приводится описание средств, позволяющих обеспечить удовлетворение указанным требованиям, что снижает безопасность посадки на палубу корабля. Недостатком аналога является отсутствие у летчика информации о качках посадочной палубы и особенно точки посадки.
В ОСП «Луна» (патент России №2083443, дата публикации 10.07.97 стр.5), взятой за прототип, для формирования глиссады с заданным углом наклона аналогично «FLOLS» используются пять вертикально расположенных огней, объединенных в блок указательных огней (БУО), которые имеют разные цвета. Крайние огни импульсные и имеют красный цвет. Далее сверху вниз идут огни желтого, зеленого и красного цвета. Для проверки геометрических параметров огней в системе используется измерительные рейка и рулетка. Параметры пучков ОПС, их взаимное расположение и расположение относительно корабля определяются путем установки вручную юстировочной рейки на палубу корабля на расстоянии, измеренном рулеткой, от отсчетных баз ОПС ЛА на палубу корабля. Контроль технических характеристик (ТХ) осуществляется путем сравнения результатов измерения параметров пучков ОСП, их взаимного расположения и расположения относительно корабля с паспортными данными на устройство. Параметры могут быть заданы как в угловой, так и линейной мере и измеряются между полетами
Недостатками указанного устройства, принимаемого за прототип, являются:
1) отсутствие у летчика информации о положении точки приземлений и плоскости палубы относительно стабилизированной оси центрального указательного (зеленого) огня, что приводит к ошибкам при посадке,
2) неавтоматизированность контроля параметров посадочных огней и отсутствие объективного документирования результатов измерения.
3) нет объективной оценки соответствия ТХ ОСП паспортным значениям на момент посадки самолета на палубу корабля.
Задачей изобретения является создание ОСП, в которой в ходе посадки ЛА:
1) передается летчику информации о положении палубы, гака или шасси относительно оси центрального указательного огня;
2) измеряются ТХ ОСП в ходе посадки ЛА;
3) объективно документируются измеренные значения ТХ ОСП.
Поставленная задача решается путем введения дополнительно в устройство как минимум двух уголковых отражателей, фотоприемника с блоком обработки видеиоинформации (ФСО) и средства ее документирования, при этом вход ФСО оптически связан через уголковые отражатели (УО) с центральным указательным огнем БУО, первый выход ФСО через блок управления, питания и контроля (БУП) и средство связи соединен с ЛА, а второй его выход через БУП связан со средством документирования. В качестве ФСО может быть использована телекамера с блоком обработки видеоизображения, который определяет координаты целей.
В этом случае информация о положении плоскости, параллельной палубе и проходящей через центры уголковых отражателей, относительно плоскости, проходящей через ось центрального указательного огня и наклоненной к палубе на угол - βгг, компенсирующий для различных ЛА неодинаковость расстояния между глазом пилота и гаком, передается в БУП, а из него по каналу связи в приемоиндикатор (ПИ), расположенный в кабине ЛА.
Между полетами с помощью устройства могут быть проверены ТХ блока указательных огней и системы его стабилизации. Так, для измерения геометрических параметров лучей указательных огней производится запись амплитуды сигналов, принятых от уголковых отражателей при повороте БУО вокруг оси, перпендикулярной оси центрального указательного огня (на угол порядка ±2°) от штатного положения БУО, при котором обеспечивается требуемый наклон глиссады к палубе корабля. При этом наклон БУО может производится автоматически с помощью системы стабилизации либо вручную.
При включении системы стабилизации аналогично производится запись амплитуды сигналов, принятых от уголковых отражателей, и после обработки в ФСО производится сравнение ее с информацией, поступающей в БУП из гироскопического датчика параметров качки корабля. По результатам совместной обработки определяется погрешность стабилизации указательных огней.
В зависимых пунктах формулы изобретения предложены решения задачи, позволяющие решить ее в полном объеме с конкретизацией вариантов решения:
Так, в п.2 формулы предложено установить уголковый отражатель (УО) на ЛА в районе расположения крюка гака или шасси. Уголковый отражатель может быть реализован виде катафотного покрытия перечисленных выше мест.
В п.3 предложено установить два уголковых отражателя так, что центры уголковых отражателей расположены на линии, параллельной плоскости палубы и пересекающей ось центрального указательного огня, при этом один уголковый отражатель установлен на оси центрального указательного огня, а второй смещен от оси на известное расстояние. Это позволит определить положение оси центрального огня относительно плоскости палубы, размеры и вид диаграммы направленности указательного огня в вертикальной плоскости и измерять размер пучка в плоскости параллельной плоскости палубы.
В п.4 предложено соединить УО с палубой жестко, например рейкой или через подъемный механизм рейки, управление которым производится из БУП, что позволит полностью автоматизировать процесс измерения.
В п.5 предложено установить уголковый отражатель в месте посадки ЛА. Например, покрасить катафотным покрытием трос аэрофинишера.
В п.6 предложено установить на БУО два проблесковых зеленых огня. Частота мерцаний одного огня постоянна, а второго изменяется в зависимости от наклона палубы относительно оси зеленого указательного огня. Например, максимальна при подъеме кормы корабля вверх относительно оси зеленого огня и минимальна при опускании кормы вниз. Это дает дополнительную информацию летчику о положении кормы корабля относительно глиссады. Частота мерцаний дополнительных проблесковых огней задается из блока управления. Эта информация может быть использована при отказе канала связи.
Чертеж устройства представлен на фиг.1, 2, 3, где обозначено:
1 - БУО,
2 - граница зоны желтого проблескового указательного огня,
3 - граница зоны желтого указательного огня,
4 - граница зоны зеленого указательного огня,
5 - граница зоны красного указательного огня,
6 - граница зоны красного проблескового указательного огня,
7 - ось центрального (зеленого) указательного огня,
8 - ФСО,
9 - УО,
10 - рейка,
11 - подъемный механизм рейки,
12 - БУП,
13 - гиростабилизированная платформа,
14 - инерциальный датчик килевой и бортовой качки корабля,
15 - средство документирования,
16 - блок связи с летательным аппаратом,
17 - прожектор проблескового зеленого огня с постоянной частотой мерцаний,
18 - прожектор проблескового зеленого огня с регулируемой частотой мерцаний,
19 - посадочная палуба корабля,
20 - ПИ летательного аппарата,
21 - осевая линия посадочного участка палубы,
22, 23 - границы посадочных огней ОСП в горизонтальной плоскости,
24 - УО, смещенный от оси центрального (зеленого) указательного огня,
25 - катафотное покрытие на тросе аэрофинишера,
26 - аэрофинишеры,
27 - расчетная точка положения гака самолета при посадке,
28 - допустимое отклонение самолета при посадке,
29 - световой пучок указательных огней,
30 - ОСП;
31 - проекция оси центрального (зеленого) указательного огня 7 на плоскость палубы,
32 - направление движения летательного аппарата при посадке,
33 - прожектор желтого проблескового указательного огня,
34 - прожектор желтого указательного огня,
35 - прожектор зеленого указательного огня,
36 - прожектор красного указательного огня,
37 - прожектор красного проблескового указательного огня,
38, 39 - прожектора базовых огней,
40, 41 - огни запрета посадки.
Устройство работает в двух режимах:
1) посадка ЛА на палубу корабля с автоматическим документированием ТХ ОСП,
2) контроль ТХ ОСП между полетами с автоматическим документированием их параметров.
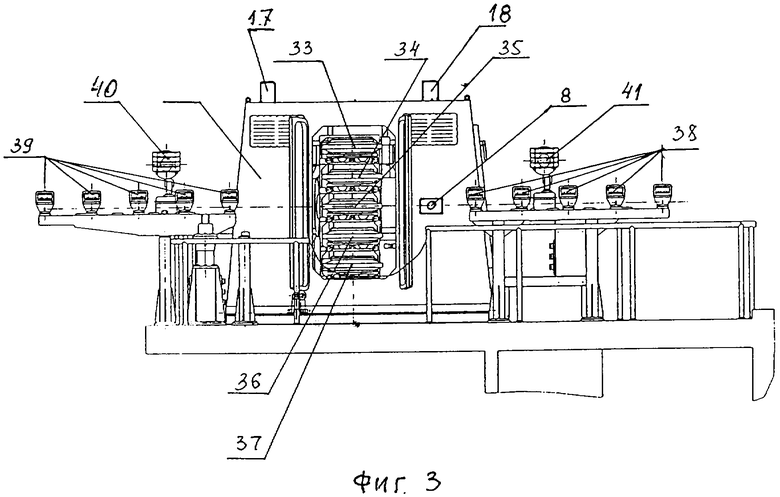
В первом режиме блок указательных огней 1 установлен на гиростабилизированную платформу 13, которая закреплена на палубе 19 и через БУП 12 связана с инерциальным датчиком качек корабля или инерциальной навигационной системой 14. При подаче питания на указательные огни создаются информационные световые зоны с границами для желтого проблескового огня 2, желтого огня 3, зеленого огня 4, красного огня 5 и красного проблескового огня 6. Кроме этого, соседние зоны имеют общие участки. При посадке, по мере снижения, летчик видит вначале желтый проблесковый огонь с полной модуляцией яркости от прожектора 33, затем желтый с неполной модуляцией яркости от прожекторов 33, 34, затем постоянный желтый от прожектора 34, далее желто-зеленый от прожекторов 34, 35, переходящий в зеленый от прожектора 35 и далее - зелено-красный от прожекторов 35, 36, красный от прожектора 36, красный с неполной модуляцией от прожекторов 36, 37 и красный проблесковый с полной модуляцией от прожектора 37.
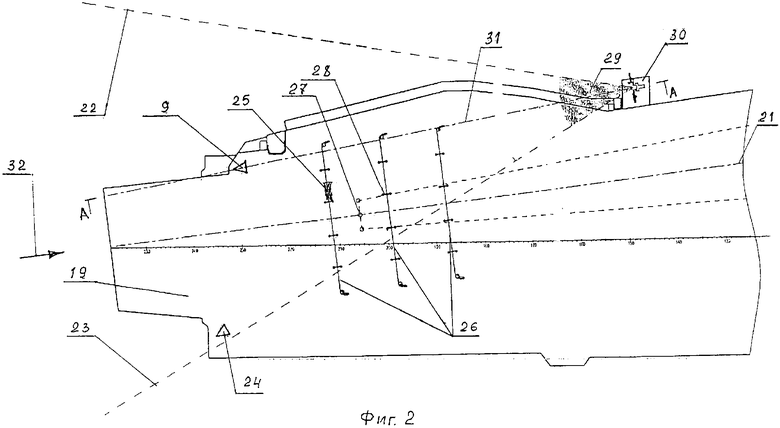
Прожектора указательных огней 33, 34, 35, 36, 37, базовых огней 38, 39, огней запрета посадки 40, 41 и проблесковые зеленые огни 17, 18 соединены с БУП. Указательные огни 29 имеют широкую диаграмму направленности в горизонтальной плоскости (порядка 20°), границы которой 22 и 23 обозначены на фиг.2. В пределах этой диаграммы на одинаковой высоте от палубы, на высоте оси зеленого указательного огня расположены два УО 9 и 24. При этом УО 9 установлен прямо на проекции оси зеленого указательного огня на плоскость палубы 31, а уголковый отражатель 24 установлен на известном расстоянии от УО 9 или на границы зоны 23. Оба УО 9 и 24 оптически соединены с ФСО 8. Оптический вход ФСО связан как с УО 9 и 24, так и с катафотным отражательным покрытием 25, расположенным на первом аэрофинишере. Центр поля зрения ФСО привязан к положению оси зеленого указательного луча. При работающей гиростабилизированной платформе 13 БУО стабилизируется в плоскости палубы или ее осредненного положения (ОПП), а УО 9, 24 и 25 совершают угловое перемещение относительно БУО. Первый выход ФСО 8 подключен через БУП 12 к блоку связи с летательным аппаратом 16 и по каналу связи его выход соединен с ПИ 20, находящимся на летательном аппарате. Второй выход ФСО 8 связан через БУП 12 с блоком документирования 15. Изменение положения УО 9, 24 и 25 относительно оси зеленого огня, например, с тактовой частотой кадра, измеряется ФСО и документируется. Оба выхода ФСО 8 работают параллельно.
Во втором режиме межприборные связи аналогичны первому режиму и отличаются только тем, что отключен первый выход ФСО. В режиме контроля из БУП 12 подается периодически сигнал на привод стабилизации угла наклона глиссады относительно горизонта или ОПП, изменяющий положение блока указательных огней 1 относительно горизонта или ОПП. Амплитуда сигнала изменяется по линейному закону. Выходы прожекторов последовательно подключаются через УО 9 и 24 к входу фотоприемника 8. Следящая система может быть отключена или периодический сигнал подается параллельно сигналу следящей системы. Блок документирования подключен через БУП к ФСО 8 и инерциальному датчику килевой и бортовой качки корабля 14.
При заходе ЛА на посадку включены базовые огни 39, 40 и в зависимости от положения его относительно указательных огней летчик видит одну из цветных зон. При подлете, совершая маневры, ЛА выводит его в зону зеленого указательного огня 4. Параллельно указательными огнями освещены уголковые отражатели 9, 24 и 25. Сигналы, отраженные от УО, поступают на вход ФСО 8. В ФСО определяются координаты УО относительно центра поля зрения фотоприемника, который связан с положением оси зеленого луча прожектора 35. При наклоне УО 9 относительно стабилизированного угла наклона глиссады относительно горизонта или ОПП его изображение смещается относительно центра поля зрения ФСО 8, и летчик получает эту информацию через БУП 12 и канал передачи данных 16. Полученная информация позволяет летчику судить о перемещениях расчетной точки положения гака 27 относительно глиссады, задаваемой осью зеленого указательного огня 7, и, маневрируя скоростью ЛА, выбрать наиболее удачный момент приземления.
Аналогично при наклоне УО 24 относительно стабилизированного угла наклона глиссады относительно горизонта или ОПП его изображение смещается относительно центра поля зрения ФСО 8, и летчик получает эту информацию через БУП 12 и канал передачи данных 16. Полученная информация, совместно с информацией о перемещения УО 9, позволяет летчику судить не только о перемещениях расчетной точки положения гака 27 относительно глиссады, задаваемой осью зеленого указательного огня 7, но и о величине бортовой качки корабля, так как разность перемещений изображений уголковых отражателей 9 и 24 обусловлена бортовой качкой корабля. Дополнительно летчик может получить информацию о наклоне палубы по отношению к глиссаде, наблюдая за частотой модуляции зеленого проблескового огня 18 по отношению к частоте модуляции второго проблескового зеленого огня 17. При подъеме кормы корабля выше ее положения, при котором посадочная палуба корабля находилась в плоскости горизонта или ОПП, частота модуляции огня 18 максимальна или минимальна по отношению к частоте зеленого проблесковые огня 17. В другом крайнем положении кормы корабля частота модуляции огня 18 минимальна или максимальна по отношению к частоте зеленого проблесковые огня 17. Сигнал управления огнями 17 и 18 формируется в БУП 12, в который поступает информация об угле наклона УО 9 из ФСО 8. При неправильном выполнении захода на посадку зажигаются огни запрета посадки 40, 41.
В режиме контроля ТХ ОПС проверяются геометрические параметры пучков указательных огней (угол наклона глиссады к палубе, угловые размеры цветных зон, их взаимное расположение), мощность излучения и погрешность стабилизации.
Угол наклона глиссады к палубе, угловые размеры цветных зон, их взаимное расположение измеряются путем записи и обработки сигнала, отраженного УО 9, совместно с информацией, поступающей в БУП 12 от стабилизированной платформы 13 с ее датчика угла, расположенного на оси стабилизации угла наклона глиссады относительно палубы или ОПП.
При этом на вход следящей системы подается двуполярный периодический сигнал, амплитуда которого изменяется по линейному закону. Таким образом, каждому значению амплитуды сигнала, поступающего в БУП 12 с выхода ФСО 8 через блок указательных огней 1, соответствует измеренное значение угла поворота оси стабилизации угла наклона глиссады относительно палубы или ОПП. В БУП 12 оба сигнала совместно обрабатываются и вычисляются перечисленные выше геометрические параметры пучков. Полученные значения сравниваются с паспортными данными ОПС и делается вывод о готовности ее к работе. Информация параллельно записывается в блок документирования 15. Для контроля мощности излучения после выполненных измерений геометрических параметров пучков калибруется ФСО 8, например, по люксометру. В БУП с учетом калибровки вычисляется, например, осевая сила света каждого из указательных огней по оси пучка.
Для измерения погрешности стабилизации производится запись сигналов с выхода ФСО 8 в БУП 12 при работающей системе стабилизации гиростабилизированной платформы 13. Параллельно в БУП 12 записывается информация о качках корабля от инерциального датчика 14. Разность синхронно измеренных значений углов наклона УО 9 и корабля в направлении глиссады определяет погрешность стабилизации угла наклона глиссады относительно палубы или ОПП.
При установке на ЛА уголкового отражателя ФСО 8 передает через БУП 12, средство связи 16 и канал связи на вход ПИ ЛА 20 взаимное изображение уголковых отражателей 9, 24, 25 и УО, установленного на ЛА. Это позволяет летчику, находясь в зоне зеленого указательного огня, маневрами ЛА синхронизировать при посадке его движения по высоте с движением палубы и аэрофинишера, что улучшает условия посадки ЛА на качающуюся палубу.
Как показал проведенный заявителем информационный поиск, из уровня техники не известны устройства с перечисленной совокупностью существенных признаков, т.е. заявляемое устройство обладает новизной в сравнении с прототипом, отличаясь от него тем, дополнительно введены как минимум два УО, передние грани которых развернуты в сторону блока указательных огней, ФСО и средство ее документирования, при этом вход фотоприемника оптически связан через УО с указательным огнем, первый выход ФСО через БУП и средство связи соединен с ЛА, а второй его выход через БУП связан со средством документирования.
В зависимых пунктах предложено:
- ввести УО на ЛА и установить его либо на гаке, либо на шасси летательного аппарата так, что его передняя грань направлена в сторону его носовой части;
- вместо УО на ЛА использовать катафотное покрытие гака или шасси;
- два УО, механически связанные со своими рейками, установить на палубе так, что центры уголковых отражателей расположены на линии, параллельной плоскости палубы и пересекающей ось центрального указательного огня, при этом один УО установлен на оси центрального указательного огня, а второй смещен от оси на известное расстояние;
- рейки могут быть жестко соединены с палубой корабля или иметь механизм подъема их в положение перпендикулярное палубе, при этом механизм связан с БУП
- введен УО, установленный в районе расположения точки приземления летательного аппарата;
- введены в БУО два проблесковых зеленых огня, один из которых имеет постоянную частоту модуляции, а частота модуляции второго регулируется из блока БУП.
Заявляемые устройство с учетом зависимых пунктов формулы изобретения может быть реализовано с применением современного оборудования и технологий и может найти широкое применение при посадке ЛА на палубу корабля и при контроле геометрических параметров световых пучков посадочных огней оптической системы посадки, устанавливаемой на палубу корабля, поэтому соответствует критерию «промышленной применимости».
Изобретение относится к области авиации, в частности к системам оптической посадки палубных летательных аппаратов (ЛА). Предложенная система посадки ЛА на палубу корабля включает базовые огни, огни запрета посадки, стабилизированный в плоскости глиссады блок указательных огней, блок управления, питания и контроля, инерциальный датчик качек корабля, блок документирования, блок связи с ЛА. Уголковые отражатели установлены на палубе корабля, аэрофинишере и ЛА. Фотодатчик установлен на корпусе блока указательных огней. Имеются два зеленых проблесковых прожектора, один из которых характеризуется регулируемой частотой вспышек. Предложенная система, по сравнению с известныими, обладает расширенными функциональными возможностями. Она создает цветные световые зоны, позволяющие летчику направить самолет по глиссаде и дополнительно передать ему видеоинформацию о перемещениях аэрофинишера, качках корабля относительно самолета и его гака. В межполетное время устройство работает как средство контроля технических характеристик системы посадки, их соответствия паспортным значениям и позволяет объективно документировать эти характеристики как во время полетов, так и в ходе регламентно-поверочных работ. 5 з.п. ф-лы, 3 ил.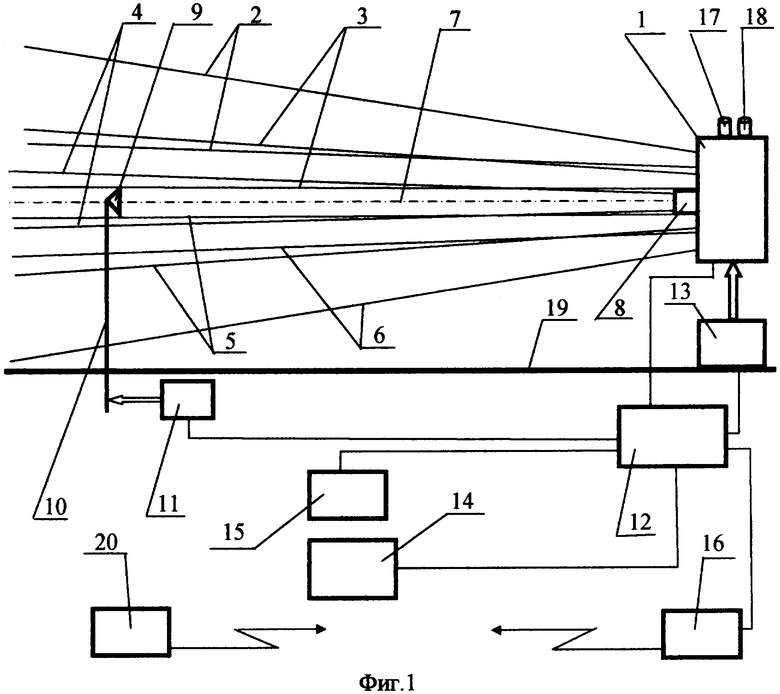
| КОРАБЕЛЬНАЯ ОПТИЧЕСКАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1993 |
|
RU2083443C1 |
| ОПТИЧЕСКАЯ СИСТЕМА ПОСАДКИ | 2000 |
|
RU2208556C2 |
| Способ и устройство для обогащения руд методом флотации | 0 |
|
SU21962A1 |
| US 4414532 A, 08.11.1983. | |||

