Изобретение относится к системам оптической навигации, в частности, с использованием лазерных и оптических источников излучения и может быть использовано для обеспечения посадки летательных аппаратов на малые и необорудованные площадки.
Известен оптический маяк визуальной посадки по глиссаде (патент США 4064424 B 64 F 1/20, 1977 г.), в котором с помощью ламповых источников света в вертикальной плоскости формируются прилегающие друг к другу световые зоны разных цветов, при этом правильному полету по глиссаде соответствует нахождение летательного аппарата (ЛА) в центральной угловой зоне зеленого цвета. Недостатками этой конструкции является малая дальность действия, обусловленная применением низкоэффективных источников света со светофильтрами, и низкая информативность из-за отсутствия горизонтальных огней и информации об относительном положении в цветовой зоне (край или середина). Кроме того, у руководителя визуальной посадки отсутствует достоверная информация о положении ЛА относительно глиссадных огней, что снижает вероятность безопасной посадки, т.к. не обеспечивается возможность объективной коррекции траектории ЛА с земли или корабля в случае неадекватных действий пилота.
Известна визуальная система посадки (патент США 2975400 CL.340-26, 1961 г. ), в которой имеется линейка горизонтальных огней одного цвета, в центре которой расположена линейка вертикальных огней другого цвета. Каждый огонь вертикальной линейки виден в определенном вертикальном угле, причем края угловых зон двух соседних огней пересекаются и при перемещении ЛА в вертикальной плоскости летчик наблюдает "перемещение" по вертикали двух огней вертикальной линейки и старается их "подвести" к линейке горизонтальных огней, т. е. выйти в положение, соответствующее центру глиссады. Эта система более информативна, т.к. индицируется позиционная информация. Однако ее дальность действия еще меньше, чем у предыдущего аналога, т.к. разрешающая способность глаза ограничена и летчик начнет различать два ближайших положения на вертикали двух "перемещающихся" огней с гораздо более близкого расстояния, чем то расстояние, на котором он различает цветность огня. Информации о положении ЛА для наземной службы эта система также не дает.
Наиболее близким аналогом предлагаемого изобретения следует признать оптическую систему наведения самолета при посадке на палубу авианосца (патент США 4414532 G 08 G 5/00; B 64 F 1/20, 1981 г.), содержащую линейку горизонтальных огней одного цвета, в центре которой расположена линейка вертикальных огней, центральный огонь которой может совпадать по цвету с цветом линейки горизонтальных огней, а верхняя и нижняя части вертикальной линейки имеют другие цвета, радиолокатор, вычислитель координат летательного аппарата, блок управления огнями, дисплей оператора и четыре дополнительные боковые световые символики отображения вертикального перемещения. Огни вертикальной линейки имеют в вертикальной плоскости узкую диаграмму направленности и каждый виден только в своей угловой зоне. Для обеспечения летчика информацией о местоположении ЛА относительно глиссады и управления дополнительными вертикальными огнями символик, указывающими пилоту о вертикальном перемещении ЛА, в систему введен радиолокатор и вычислитель координат ЛА. Существенным недостатком прототипа также является малая дальность действия. Кроме того, радиолокатор подвержен влиянию радиопомех и снижает скрытность привода ЛА к месту посадки. При постановке искусственных радиопомех возможно создание катастрофической ситуации при посадке ЛА.
Предметом данного изобретения является разработка конструкции оптической системы посадки, обеспечивающей большую дальность действия, возможность измерения координат ЛА без использования радиолокационных средств, не обеспечивающих скрытность посадки и подверженных воздействию искусственно поставленных радиопомех. Устройство содержит линейку горизонтальных огней одного цвета, в центре которой расположена линейка вертикальных огней, центральный огонь которой выполнен в виде сканирующего лазерного источника света, формирующего в вертикальной плоскости не менее двух прилегающих друг к другу световых зон с разными длинами волн излучения с относительно узкими диаграммами направленности. Угловые размеры цветовых зон, формируемых в вертикальной плоскости другими огнями в линейке вертикальных огней, превышают суммарный угловой размер всех трех цветовых зон, формируемых сканирующим лазерным источником света. Дополнительно введены фотоприемное устройство, расположенное вблизи выходной апертуры сканирующего лазерного источника света, блок управления сканирующим лазерным источником света, генератор импульсов и блок синхронизации разверток дисплея и сканирующего лазерного источника света. Один вход вычислителя соединен с выходом фотоприемного устройства, второй вход вычислителя соединен с выходом блока синхронизации разверток, а третий вход вычислителя соединен с выходом генератора импульсов, который также подсоединен к одному входу блока управления сканирующим лазерным источником света, один выход вычислителя соединен с входом блока управления огнями, второй выход вычислителя подключен ко второму входу блока управления сканирующим лазерным источником света, третий выход вычислителя подсоединен ко входу генератора импульсов, а четвертый выход вычислителя подключен к одному входу дисплея, ко второму входу которого подключен выход синхронизатора разверток, соединенный также с третьим входом блока управления сканирующим лазерным источником света.
Дополнительно, для обеспечения более точного измерения угловых координат в ближней зоне посадки рядом с фотоприемным устройством может быть установлена видеокамера, выход которой подключается к дополнительному входу вычислителя. В качестве сканирующего лазерного источника света могут быть использованы либо сканирующий полупроводниковый лазер с электронным возбуждением, либо разные лазеры со сканирующими устройствами. Линейка вертикальных огней, исключая центральный огонь, может быть выполнена в виде наборной панели с множеством источников света, расположенных в столбец прилегающими друг к другу горизонтальными рядами, при этом источники света одного ряда могут иметь либо один цвет, либо быть разного цвета, причем во втором случае источники света, расположенные в один столбец, имеют одинаковый цвет.
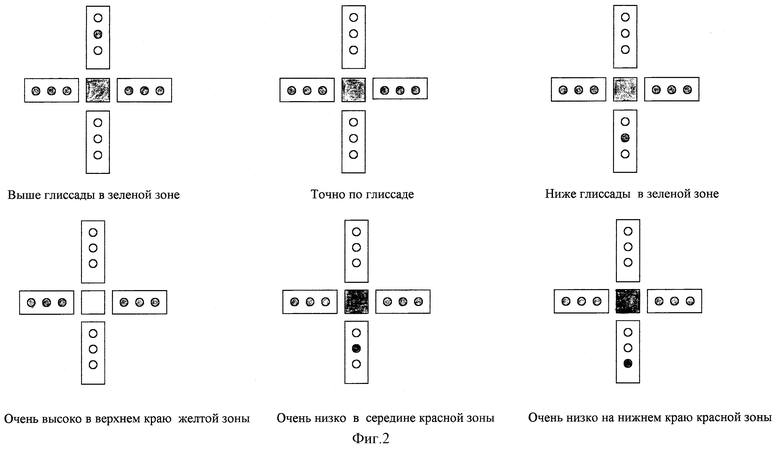
Для обоснования введения в формулу изобретения вышеприведенных признаков укажем следующее. Сущность заявленной конструкции состоит в том, что сканирующий лазерный источник света за счет узкой диаграммы направленности и существенной световой мощности обеспечивает гораздо большую дальность наблюдения по сравнению с любым нелазерным источником света. Поэтому на дальних расстояниях (от 2 км до 20 км), на которых не работает позиционный принцип посадки, в данном устройстве используется цветовой признак наведения на точную глиссаду, при котором в вертикальной плоскости формируются три узконаправленные цветовые зоны. При правильном положении на глиссаде летчик видит цвет центральной зоны, а при выходе вверх или вниз из этой зоны он наблюдает соответствующее изменение цвета излучения. Положение ЛА внутри одной цветовой зоны летчику неизвестно и на больших дальностях до места посадки это не критично, но при приближении к месту посадки необходимо более точное наведение, которое обеспечивает позиционный принцип наведения на центральную ось глиссады. Для реализации этого внутри узконаправленных цветовых зон на ближнем расстоянии (менее 1,5-2 км) используются огни вертикальной линейки, которые переключаются автоматически при перемещении ЛА по вертикали, для чего необходимо знать угловые координаты ЛА. В предлагаемом устройстве определение координат ЛА осуществляется с помощью сканирующего лазерного луча и дополнительно введенных фотоприемного устройства, принимающего отраженный от ЛА сигнал в момент прохождения луча по поверхности ЛА, синхронизатора разверток лазера и дисплея, обеспечивающего измерение угловых координат ЛА, и генератора импульсов, обеспечивающего измерение дальности до ЛА. (Для повышения точности измерения угловых координат ЛА на нем можно установить маленький уголковый отражатель). Информация об относительном угловом положении ЛА в вертикальной плоскости внутри узконаправленной цветовой зоны используется для управления огнями вертикальной линейки. Чем выше (ниже) от центральной линии находится ЛА, тем более верхний (нижний) огонь зажигается на вертикальной линейке. При этом цвет центрального огня и цвет огней вертикальной линейки будут показывать, в какой зоне в данный момент находится ЛА. Информация о дальности до ЛА используется для обеспечения пилота комфортной яркостью центрального огня путем автоматического снижения мощности лазерного источника света при приближении ЛА. Синхронизация разверток сканирующего лазерного источника света и дисплея руководителя визуальной посадки, а также подача на дисплей сигнала фотодетектора обеспечивают наземные службы информацией о положении ЛА на глиссаде, что позволяет осуществлять дополнительный контроль за действиями пилота и повысить безопасность посадки. Таким образом в предлагаемой оптической системе посадки ЛА за счет введения дополнительных устройств и связей между ними совмещены функции указательного огня и оптического локатора, который обладает гораздо большей помехозащищенностью и скрытностью по сравнению с радиолокатором.
Изобретение отличается от ближайшего аналога тем, что:
а) центральный огонь выполнен в виде сканирующего лазерного источника света, формирующего в вертикальной плоскости не менее двух прилегающих друг к другу световых зон с разными длинами волн излучения;
б) угловые размеры цветовых зон, формируемых в вертикальной плоскости другими огнями в линейке вертикальных огней, превышают суммарный угловой размер всех световых зон, формируемых сканирующим лазерным источником света;
в) устройство дополнительно содержит фотоприемное устройство, расположенное вблизи выходной апертуры сканирующего лазерного источника света;
г) устройство дополнительно содержит блок управления сканирующим лазерным источником света;
д) устройство дополнительно содержит генератор импульсов;
е) устройство дополнительно содержит блок синхронизации разверток дисплея и сканирующего лазерного источника света;
ж) устройство может дополнительно содержать видеокамеру, установленную рядом с фотоприемным устройством, выход которой соединен с дополнительным входом вычислителя;
з) в качестве сканирующего лазерного источника света может быть использован сканирующий полупроводниковый лазер с электронным возбуждением;
и) в качестве сканирующего лазерного источника света могут быть использованы отдельные лазеры со сканирующими устройствами;
к) линейка вертикальных огней, исключая центральный огонь, может быть выполнена в виде наборной панели с множеством источников света, расположенных в столбец прилегающими друг к другу горизонтальными рядами, причем в каждом ряду установлено не менее двух источников света разного цвета, а источники света, расположенные в один столбец, имеют одинаковый цвет;
л) линейка вертикальных огней, исключая центральный огонь, может быть выполнена в виде наборной панели с множеством источников света, расположенных в столбец прилегающими друг к другу горизонтальными рядами, причем источники света одного ряда имеют одинаковый цвет.
Сущность изобретения поясняется фиг. 1 и 2, где на фиг.1 приведена блок-схема устройства, а на фиг.2 иллюстрируется взаимосвязь между положением ЛА на глиссаде и наблюдаемой пилотом картиной огней оптической системы посадки.
Устройство содержит линейку горизонтальных огней одного цвета 1, в центре которой снизу и сверху от центрального огня расположены линейки вертикальных огней 2, центральный огонь выполнен в виде сканирующего лазерного источника света 3; фотоприемное устройство 4, расположенное вблизи выходной апертуры сканирующего лазерного источника света, блоки управления огнями вертикальной линейки 5 и сканирующим лазерным источником света 6, генератор импульсов 7, блок синхронизации разверток дисплея и сканирующего лазерного источника света 8, вычислитель 9 и дисплей оператора 10. На фиг.1 показаны соответствующие связи между блоками.
Устройство выполнено на следующей элементной базе: приведен вариант конструкции с использованием в качестве сканирующего лазерного источника света трехцветного сканирующего полупроводникового лазера с электронным возбуждением (СПЛЭВ) со средней мощностью 1 Вт, работающего в телевизионном режиме высокого разрешения с частотой кадров 100 Гц; в качестве источников излучения в вертикальной и горизонтальной линейках огней использованы высокоэффективные матрицы суперлюминесцентных светодиодов, имеющих собственные диаграммы направленности в одной плоскости ±20o, и в другой - ±5o; в фотоприемном устройстве применен лавинный фотодиод с быстродействием порядка 1-2 наносекунд; в блоках управления огнями и СПЛЭВ используются стандартные выпрямители и высоковольтные трансформаторы; в блоке синхронизации и генераторе импульсов использованы микросхемы серий 561, 1533, 538 и 140, а также стандартные транзисторы, диоды, резисторы, конденсаторы и катушки индуктивности; в качестве вычислителя и дисплея может быть использован PC на базе Pentium 133.
Устройство работает следующим образом. При включении питания загораются линейка горизонтальных огней 1 и сканирующий лазерный источник света 3. При попадании ЛА в зону, освещаемую лазерным источником, на выходе фотоприемного устройства 4 возникает сигнал, который подается на вычислитель 9. В вычислителе определяются времена задержки сигнала фотоприемного устройства относительно импульсов запуска кадровой и строчной развертки, поступающих на вычислитель с блока синхронизации разверток 8. Эти времена задержки пропорциональны положению ЛА по углу места и азимуту соответственно. Эта информация о положении ЛА в зоне сканирования подается на дисплей руководителя полета 10 и используется для автоматического управления огнями вертикальной линейки 2 в соответствии с вышеуказанным алгоритмом. Периодически (например, через каждые 10 кадров развертки) после вычисления угловых координат ЛА по команде вычислителя луч лазера направляется на ЛА, с генератора импульсов 7 одновременно подаются импульсы запуска лазерного излучения и опорные импульсы на вычислитель. В вычислителе определяется дальность до ЛА по временной задержке импульса с фотоприемного устройства относительно опорного импульса. Информация о дальности также подается на дисплей руководителя полетами и используется для автоматического снижения яркости излучения сканирующего лазерного источника света и огней горизонтальной и вертикальной линеек при приближении ЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАРАВИЗУАЛЬНЫЙ ИНДИКАТОР ОТКЛОНЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ | 2003 |
|
RU2250508C2 |
| Восьмицветная растровая оптическая система посадки | 2019 |
|
RU2743602C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2002 |
|
RU2242052C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА В НОЧНОЕ ВРЕМЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2238882C2 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| КОРАБЕЛЬНАЯ ОПТИЧЕСКАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1993 |
|
RU2083443C1 |
| МОДЕЛЬ ОСВЕТИТЕЛЬНОЙ СИСТЕМЫ АЭРОДРОМА ДЛЯ ОБУЧЕНИЯ ПОСАДКЕ | 1992 |
|
RU2042981C1 |
| ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ | 1993 |
|
RU2106658C1 |
| ОПТИЧЕСКОЕ НАВИГАЦИОННОЕ УСТРОЙСТВО | 1994 |
|
RU2083444C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2014 |
|
RU2548366C1 |
Изобретение относится к технике оптической навигации для летательных аппаратов. Система посадки содержит линейку горизонтальных огней одного цвета, в центре которой расположена линейка вертикальных огней. Центральный огонь, выполненный в виде сканирующего лазерного источника света, может совпадать по цвету с цветом линейки горизонтальных огней, а верхняя и нижняя части вертикальной линейки могут иметь другие цвета. Имеются также блок управления огнями, вычислитель координат летательного аппарата, дисплей оператора, фотоприемное устройство, расположенное вблизи выходной апертуры сканирующего лазерного источника света, блок управления сканирующим лазерным источником света, генератор импульсов и блок синхронизации разверток дисплея и сканирующего лазерного источника света. Сканирующий лазерный источник света за счет узкой диаграммы направленности и существенной световой мощности обеспечивает увеличенную дальность наблюдения. Координаты летательного аппарата измеряются без использования радиолокационных средств, что предопределяет скрытность посадки. 5 з.п. ф-лы, 2 ил.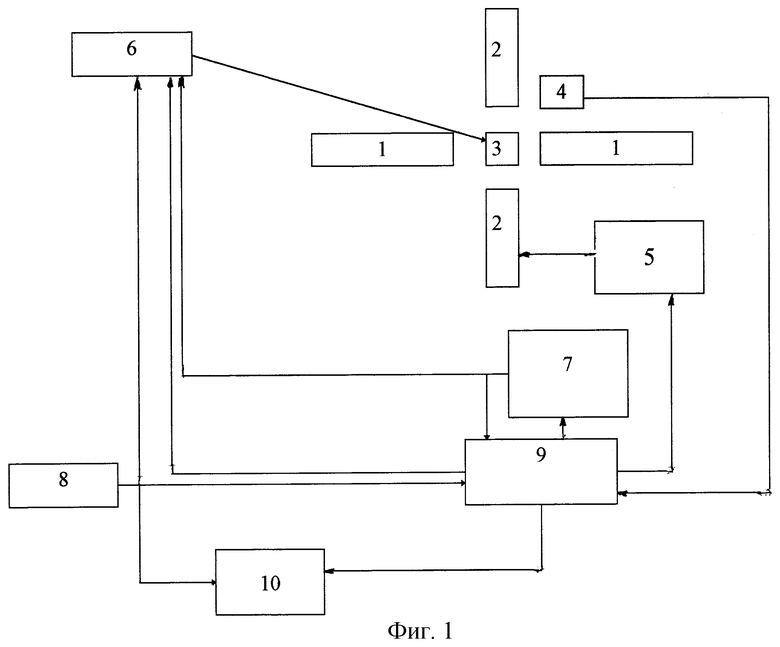
| US 4414532 А, 08.11.1983 | |||
| US 2975400 А, 14.03.1961 | |||
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1989 |
|
SU1828036A1 |
| ИНТЕГРАЛЬНЫЙ ПИЛОТАЖНО-НАВИГАЦИОННЫЙ ДИСПЛЕЙ | 1991 |
|
RU2014250C1 |

