Заявляемое изобретение относится к области машиностроения, в частности к способам и процессам управления работой насоса в гидравлических системах испытательного оборудования, используемого при одновременном испытании двух парных гидроаппаратов.
Проблемой, на решение которой направлено заявляемое изобретение является то, что общеизвестные способы и оборудование для совместных гидравлических испытаний левого и правого гидроаппаратов, не позволяют в полной мере объективно оценивать измеряемые величины при испытаниях, так как на данном оборудовании не предусмотрена возможность поддержания в автоматическом режиме значений давления на входе и на выходе этих изделий в заданных диапазонах, значения давлений регулируются вручную, возрастают риски ошибок при испытании. Соответственно невозможно признать результаты испытаний достоверными.
Сложность конструкции гидроаппаратов исключает возможность производства экземпляров испытываемых гидроаппаратов, в которых утечки в правом и левом гидроаппаратах будут одинаковы. Также испытанию могут подвергаться гидроаппараты после капитального ремонта, в которых разброс утечек на левом и правом изделиях будет больше из-за неодинакового механического износа элементов гидроаппаратов. На величину утечек также влияет тепловое расширение элементов испытываемых гидроаппаратов. Во время прогрева изделий, даже на стационарной комбинации элементов управления наблюдается дрейф величины давления.
Вышеуказанные особенности приводят к тому, что во время испытаний величины давлений в выходных каналах при одновременном испытании двух парных гидроаппаратов выходят за границы их предельно-допустимых значений, причем изменения давления неодинаковы на правом и левом гидроаппарате.
Задачами на решение которой направлено заявляемое изобретение являются: обеспечение возможности поддержания в автоматическом режиме значений давления на входе и на выходе левого и правого гидроаппаратов в заданных диапазонах при проведения совместных гидравлических испытаний, а также снижение трудоемкости за счет исключения ручных регулировок давления.
Технический результат заключается в повышении достоверности и точности воспроизводимых и контролируемых стендом результатов испытаний левого и правого гидроаппаратов.
Дополнительный технический результат заключается в повышении производительности выполняемых работ.
Из предшествующего уровня техники (патент РФ на полезную модель RU 133885, МПК F15B 20/00, опубликовано 27.10.2013, бюл. №30) известен стенд для проверки функционирования гидравлического распределителя, содержащий бак с рабочей жидкостью, насос, манометр, систему фильтров, предохранительный гидроклапан и сливной трубопровод, отличающийся тем, что система фильтров выполнена в виде последовательно соединенных между собой:
- всасывающего фильтра, установленного в баке и соединенного с насосом для очистки всасываемой из бака рабочей жидкости,
- напорного фильтра, установленного на напорной ветке, соединяющей предохранительный гидроклапан и проверяемый гидравлический распределитель,
- сливного фильтра, установленного в баке на конце сливного трубопровода.Предлагаемый стенд эксплуатируется следующим образом.
Перед запуском стенда на блоке управления 17 задается необходимое количество циклов. После запуска стенда насосная станция, источником гидравлической энергии которой выступает шестеренный насос 5 (например, типа GHP2-D-22), обеспечивает создание потока РЖ (типа промышленного масла марки МГЕ-10А, ВГМЗ, ЭШ, ГРЖ-12 и др.) с заданным давлением, которое фиксируется на манометре 7 и подается в напорную магистраль проверяемого ЭГР 18. Блок управления 17 подает управляющий сигнал перемещения запорно-регулирующего элемента ЭГР 18 в положение прямого хода штока гидроцилиндра 14. Шток гидроцилиндра 14 перемещается из крайнего левого в крайнее правое положение, которое фиксируется срабатыванием первого концевого выключателя 19, сигнал от которого поступает в блок управления 17 и осциллограф (на чертеже не показан). В блоке управления 17 формируется управляющий сигнал на переключение и подается в модулятор ЭГР 18, что фиксируется на осциллографе (на чертеже не показан). Блок управления 17 подает управляющий сигнал на модулятор ЭГР 18, в котором формируется и подается управляющее воздействие на электромагнит управления запорно-регулирующего элемента ЭГР 18. Запорно-регулирующий элемент ЭГР 18 перемещается в положение обратного хода штока гидроцилиндра 14, что сопровождается падением давления в одной из полостей гидроцилиндра 14, выстоем и нарастанием в другой, которое фиксируется датчиками давления первым 15 и вторым 16 в исполнительных магистралях.
Шток гидроцилиндра 14 перемещается в исходное положение, которое фиксируется срабатыванием второго концевого выключателя 20, сигнал которого также фиксируется на осциллографе (на чертеже не показан). Далее цикл повторяется.
Также из предшествующего уровня техники (патент РФ на изобретение №2251025, МПК F04C 11/00, F04C 15/04, опубликовано 27.04.2005 бюл. № 12), известен способ управления и стабилизации выходного давления насосной станции, включающий формирование сигнала управления расходом рабочей жидкости насосной станции путем получения разностного сигнала между задаваемым сигналом и сигналом, пропорциональным давлению этой рабочей жидкости на выходе насосной станции, отличающийся тем, что полученный разностный сигнал вначале усиливают с коэффициентом усиления k0, затем одновременно пропускают по двум каналам, а потом суммируют сигналы, прошедшие по этим каналам, причем в первом канале сигнал усиливают с коэффициентом усиления, соответствующим коэффициенту сжимаемости рабочей жидкости, а во втором канале сигнал вначале усиливают с первым переменным коэффициентом усиления kпер1 , затем умножают на второй переменный коэффициент усиления kпер2, а потом интегрируют, а суммарный сигнал одновременно подают в качестве сигнала управления расходом рабочей жидкости и во второй канал в качестве второго переменного коэффициента усиления, причем первый переменный коэффициент усиления выбирают обратно пропорциональным удвоенной величине стабилизированного давления Рпотр рабочей жидкости на выходе насосной станции и формируют путем соответствующего преобразования задаваемого сигнала, а второй переменный коэффициент усиления формируют в виде сигнала, пропорционального расходу Qн рабочей жидкости насосной станции путем соответствующего преобразования сигнала управления расходом рабочей жидкости.
Вышеуказанный способ осуществляется посредством насосной станции, содержащей насос, гидравлическим входом соединенный с баком с рабочей жидкостью, выполненным в виде емкости с крышкой, гидравлическим выходом через гидроэлементы соединенный с выходным трубопроводом станции, входной трубопровод которой после гидросистемы потребителя подсоединен к баку, и рабочим валом механически связанный с электродвигателем, и установленный в выходном трубопроводе насосной станции датчик давления, отличающийся тем, что в нее введены блок адаптации, блок теплоотводящих элементов и вентилятор, а также сумматор, пропорционально-интегро-дифференциальный регулятор (ПИД-регулятор) и усилитель, причем блок теплоотводящих элементов закреплен в крышке емкости и нижней частью помещен в рабочую жидкость, а верхней частью расположен над этой крышкой, вентилятор установлен с возможностью обдува электродвигателя, а также крышки емкости и верхней части блока теплоотводящих элементов, ПИД-регулятор выходом через преобразователь частоты электрически связан со входом электродвигателя, а датчик давления электрическим выходом подключен к первому входу усилителя, выходом соединенного с первым входом сумматора, который вторым входом подключен к первому электрическому входу насосной станции, при этом блок адаптации первым входом подключен к выходу сумматора, вторым входом соединен с первым электрическим входом насосной станции, а выход блока адаптации одновременно подключен ко входу ПИД-регулятора и к своему третьему входу, причем второй вход усилителя соединен со вторым электрическим входом насосной станции, а насос выполнен в виде нерегулируемой роликолопастной машины.Указанный в патенте РФ на изобретение № 2251025 способ управления и стабилизации выходного давления насосной станции, по мнению Заявителя, является ближайшим аналогом (прототипом), заявленного способа.
Недостатки аналога и прототипа:
- невозможность совместного испытания двух парных гидроаппаратов с одновременным поддержанием в автоматическом режиме значения давления в заданных диапазонах как на входе у двух испытываемых гидроаппаратов, так и на выходе;
- описанные способы и принципы работы установок не позволяют в полной мере объективно оценивать измеряемые величины при испытаниях;
- невозможность выполнять регулировку давления на установках, для реализации данных способов, посредством только одного гидронасоса, что усложняет гидравлическую схему установки.
Указанный технический результат достигается тем, что заявленный способ поддержания требуемых значений гидравлического давления при одновременном испытании двух парных гидроаппаратов, включающий формирование сигнала задания для внутреннего контура управления с выхода внешнего контура управления, поступление сигнала задания и сигнала обратной связи для внутреннего контура управления на сумматор формирования сигнала ошибки внутреннего контура управления, вычисление ошибки регулирования сумматором формирования сигнала ошибки внутреннего контура управления, представляющей собой разность между сигналом задания для внутреннего контура управления и сигналом обратной связи для внутреннего контура управления, поступление сигнала ошибки регулирования на ПИД регулятор внутреннего контура управления, формирование ПИД регулятором внутреннего контура управления задания частоты вращения для частотного преобразователя, обеспечение частотным преобразователем вращения электродвигателя с заданной частотой, который приводит во вращение гидронасос, забирающий рабочую жидкость из гидробака и подающий ее на входные каналы П1 и П2 левого и правого гидроаппарата, а также на преобразователь входного давления левого гидроаппарата и преобразователь входного давления правого гидроаппарата, поступление рабочей жидкости через входной канал П1 в левый гидроаппарат, а через входной канал П2 в правый гидроаппарат, изменение частоты вращения электродвигателя, приводящее к изменению производительности гидронасоса и изменяющее давление на входных каналах П1 и П2 левого и правого гидроаппарата, а также на преобразователе входного давления левого гидроаппарата и преобразователе входного давления правого гидроаппарата, формирование сигнала обратной связи для внутреннего контура управления преобразователем входного давления левого гидроаппарата и преобразователем входного давления правого гидроаппарата, поступление сигналов с преобразователя входного давления левого гидроаппарата и преобразователя входного давления правого гидроаппарата в сумматор входных давлений гидроаппаратов, а затем на усилитель суммы входных давлений гидроаппаратов с коэффициентом усиления ½, поступление значений наибольшего и наименьшего предельно-допустимого значения давления для выходных каналов Р1, Р2 в сумматор предельно-допустимых значений, а далее -на усилитель суммы предельно-допустимых значений с коэффициентом усиления ½, сигнал задания для внешнего контура управления и сигнал обратной связи для внешнего контура управления поступают на сумматор формирования сигнала ошибки внешнего контура управления, который вычисляет ошибку регулирования, представляющую собой разность между сигналом задания для внешнего контура управления и сигналом обратной связи для внешнего контура управления, затем сигнал ошибки регулирования поступает на ПИД регулятор внешнего контура управления, который формирует задание для внутреннего контура управления, которое поступает в блок ограничения задания, причем задание ограничено наибольшим и наименьшим предельно-допустимыми значениями давления для входных каналов П1, П2 испытываемых левого и правого гидроаппаратов и поступает от таблицы предельно-допустимых значений давлений испытания, формирование сигнала обратной связи для внешнего контура управления преобразователем выходного давления левого гидроаппарата и преобразователем выходного давления правого гидроаппарата, поступление сигналов с преобразователя выходного давления левого гидроаппарата и преобразователя выходного давления правого гидроаппарата в сумматор выходных давлений гидроаппаратов, а затем на усилитель суммы выходных давлений гидроаппаратов с коэффициентом усиления ½.
Сущность заявляемого изобретения поясняется графическими материалами:
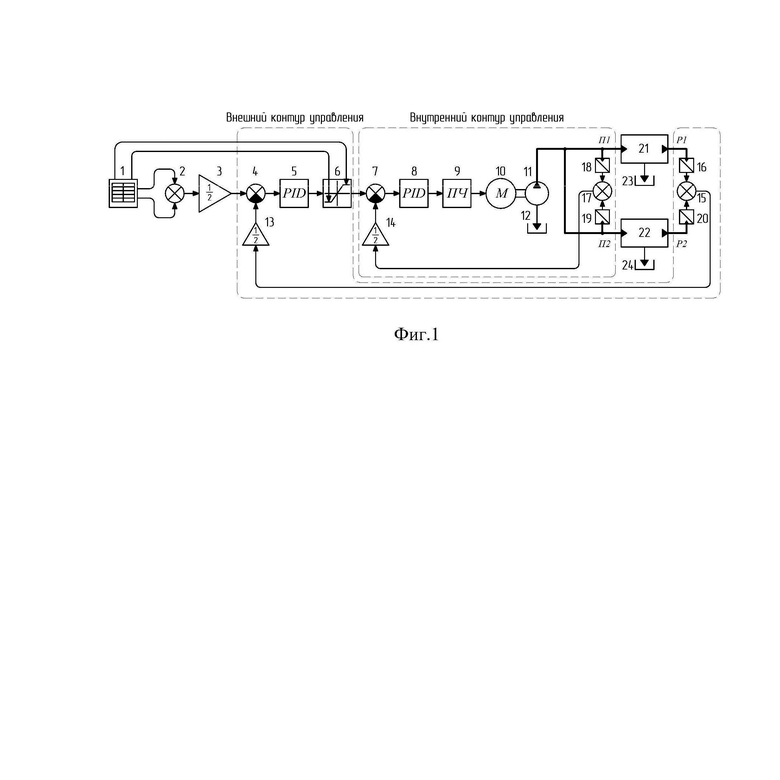
Фиг. 1 Структурно - функциональная схема системы автоматического управления для поддержания гидравлического давления при совместных испытаниях двух парных гидроаппаратов.
На фиг. 1 представлена структурно - функциональная схема системы автоматического управления для поддержания гидравлического давления при совместных испытаниях двух парных гидроаппаратов. Обозначены: 1 - таблица предельно-допустимых значений давлений испытания; 2 - сумматор предельно-допустимых значений; 3 - усилитель суммы предельно-допустимых значений с коэффициентом усиления ½; 4 - сумматор формирования сигнала ошибки внешнего контура управления; 5 - ПИД регулятор внешнего контура управления; 6 - блок ограничения задания; 7 - сумматор формирования сигнала ошибки внутреннего контура управления; 8 - ПИД регулятор внутреннего контура управления; 9 - частотный преобразователь; 10 - электродвигатель; 11 - гидронасос; 12 - гидробак; 13 - усилитель суммы выходных давлений гидроаппаратов с коэффициентом усиления ½, 14 - усилитель суммы входных давлений гидроаппаратов с коэффициентом усиления ½, 15 - сумматор выходных давлений гидроаппаратов; 16 - преобразователь выходного давления левого гидроаппарата; 17 - сумматор входных давлений гидроаппаратов; 18 - преобразователь входного давления левого гидроаппарата, 19 - преобразователь входного давления правого гидроаппарата 20 - преобразователь выходного давления правого гидроаппарата; 21 - левый испытываемый гидроаппарат; 22 - правый испытываемый гидроаппарат; 23, 24 - слив в гидробак; П1 - входной канал для левого испытываемого гидроаппарата 21; П2 - входной канал для правого испытываемого гидроаппарата 22; Р1 - выходной канал для левого испытываемого гидроаппарата 21; Р2 - выходной канал для правого испытываемого гидроаппарата 22.
Система автоматического управления, реализующая способ состоит из двух контуров подчиненного (каскадного) управления. Контуры между собой соединены электрическими линиями.
Внутренний контур управления предназначен для регулирования давления во входных каналах П1 и П2.
Внутренний контур управления состоит из сумматора формирования сигнала ошибки внутреннего контура управления 7, ПИД регулятора внутреннего контура управления 8, преобразователя частоты 9, электродвигателя 10, гидронасоса 11, гидробака 12, сумматора входных давлений гидроаппаратов 17, преобразователя входного давления левого гидроаппарата 18, преобразователь входного давления правого гидроаппарата 19 и усилителя 14 суммы входных давлений гидроаппаратов с коэффициентом усиления ½.
Источник сигнала задания для внутреннего контура управления - выход внешнего контура управления.
Под сигналом, в данном случае, понимается значение давления.
Способ поддержания требуемых значений гидравлического давления при одновременном испытании двух парных гидроаппаратов осуществляют следующим образом.
Сигнал задания для внутреннего контура управления и сигнал обратной связи для внутреннего контура поступают на сумматор формирования сигнала ошибки внутреннего контура управления 7, который вычисляет ошибку регулирования, представляющей собой разность между сигналом задания для внутреннего контура и сигналом обратной связи для внутреннего контура. Далее сигнал ошибки регулирования поступает на ПИД регулятор внутреннего контура управления 8. ПИД регулятор внутреннего контура управления 8 формирует задание частоты вращения для преобразователя частоты 9. Преобразователь частоты 9 с заданной частотой обеспечивает вращение электродвигателя 10, который приводит во вращение гидронасос 11, который забирает рабочую жидкость из гидробака 12 и подает ее на входные каналы П1 и П2 левого 21 и правого 22 гидроаппарата, а также на преобразователь входного давления левого гидроаппарата 18 и преобразователь входного давления правого гидроаппарата 19. Рабочая жидкость, через входной канал П1 поступает в левый гидроаппарат 21, а через входной канал П2 в правый гидроаппарат 22. Изменение частоты вращения электро-двигателя 10 влечет за собой изменение производительности гидронасоса 11, что в результате приводит к изменению давления на входных каналах П1 и П2 левого 21 и правого 22 гидроаппарата, а также на преобразователе входного давления левого гидроаппарата 18 и преобразователе входного давления правого гидроаппарата 19.
Сигнал обратной связи для внутреннего контура управления формируется преобразователем входного давления левого гидроаппарата 18 и преобразователем входного давления правого гидроаппарата 19, которые подключены во входные каналы П1 и П2 левого и правого испытываемых гидроаппаратов соответственно. Сигналы преобразователя входного давления левого гидроаппарата 18 и преобразователя входного давления правого гидроаппарата 19 поступают в сумматор входных давлений гидроаппаратов 17, а затем на - усилитель 14 суммы входных давлений гидроаппаратов с коэффициентом усиления ½. Таким образом, сигналом обратной связи для внутреннего контура управления является полусумма значений давления, поступивших от преобразователя входного давления левого гидроаппарата 18 и преобразователя входного давления правого гидроаппарата 19.
Внешний контур управления предназначен для регулирования давления в выходных каналах Р1 и Р2 формируя задание для подчиненного ему внутреннего контура управления.
Внешний контур управления состоит из сумматора формирования сигнала ошибки внешнего контура управления 4, ПИД регулятора внешнего контура управления 5, блока ограничения задания 6, сумматора выходных давлений гидроаппаратов 15, преобразователя выходного давления левого гидроаппарата 16, преобразователя выходного давления правого гидроаппарата 20 и усилителя 13 суммы выходных давлений гидроаппаратов с коэффициентом усиления ½.
Источником сигнала задания для системы автоматического управления является таблица предельно-допустимых значений давлений испытания 1, в которой хранятся наибольшие и наименьшие предельно-допустимые значения давлений в каналах П1, П2 и Р1, Р2 испытываемого гидроаппарата (одинаковые, как для правого, так и для левого гидроаппарата). Значения наибольшего и наименьшего предельно-допустимого значения давления для выходных каналов Р1, Р2 поступают в сумматор предельно-допустимых значений 2, а далее - на усилитель 3 суммы предельно-допустимых значений с коэффициентом усиления ½. Таким образом, заданием для внешнего контура управления является полусумма значений наибольшего и наименьшего предельно-допустимого давления, то есть фактически среднее допустимое значение давления.
Сигнал задания для внешнего контура и сигнал обратной связи для внешнего контура поступают на сумматор формирования сигнала ошибки внешнего контура управления 4 который вычисляет ошибку регулирования, представляющую собой разность между сигналом задания для внешнего контура и сигналом обратной связи для внешнего контура. Далее сигнал ошибки регулирования поступает на ПИД регулятор внешнего контура управления 5. ПИД регулятор внешнего контура 5 управления формирует задание для внутреннего контура управления, которое поступает в блок ограничения задания 6, причем задание ограничено наибольшим и наименьшим предельно-допустимым значением давления для входных каналов П1, П2 левого и правого гидроаппаратов 21 и 22, которое поступает от таблицы предельно-допустимых значений давлений испытания 1.
Сигнал обратной связи для внешнего контура управления формируется преобразователем выходного давления левого гидроаппарата 16 и преобразователем выходного давления правого гидроаппарата 20, которые подключены в выходные каналы Р1, Р2 левого и правого испытываемых гидроаппаратов соответственно. Сигналы с преобразователя выходного давления левого гидроаппарата 16 и преобразователя выходного давления правого гидроаппарата 20 поступают в сумматор выходных давлений гидроаппаратов 15, а затем на усилитель 13 суммы выходных давлений гидроаппаратов с коэффициентом усиления ½. Таким образом сигналом обратной связи для внешнего контура управления является полусумма значений давления, поступивших от преобразователя выходного давления левого гидроаппарата 16 и преобразователя выходного давления правого гидроаппарата 20.
В результате работы системы автоматического управления, реализующей способ, контролируемые при испытаниях значения давлений в выходных каналах Р1 и Р2 всегда равноудалены от предельно-допустимых значений, так как задание на внешний контур управления это полусумма от предельно-допустимого верхнего и нижнего значения давлений в выходных каналах Р1 и Р2, а сигнал обратной связи также полусумма от значений давлений в выходных каналах Р1 и Р2.
Сигнал обратной связи для внутреннего контура управления - это также полусумма от значений давлений во входных каналах П1 и П2, что позволяет производить регулировку давлений на входе двух гидроаппаратов с применением одного насоса, так как разница давлений между ними обычно значительно меньше диапазона предельно-допустимых значений для входных каналов П1 и П2.
На АО «НПК «Уралвагонзавод» заявляемое изобретение используется в цехах механосборочного производства для поддержания требуемых значений гидравлического давления при одновременном испытании двух парных гидроаппаратов и подтвердило свою технико-экономическую эффективность.
Заявляемое изобретение относится к области машиностроения, в частности к способам и процессам управления работой насоса в гидравлических системах испытательного оборудования, используемого при одновременном испытании двух парных гидроаппаратов. Задачей, на решение которой направлено заявляемое изобретение является: обеспечение возможности поддержания в автоматическом режиме значений давления на входе и на выходе левого и правого гидроаппаратов в заданных диапазонах при проведении совместных гидравлических испытаний, а также снижение трудоемкости за счет исключения ручных регулировок давления. Технический результат заключается в повышении достоверности и точности воспроизводимых и контролируемых стендом результатов испытаний левого и правого гидроаппаратов. Дополнительный технический результат заключается в повышении производительности выполняемых работ. 1 ил.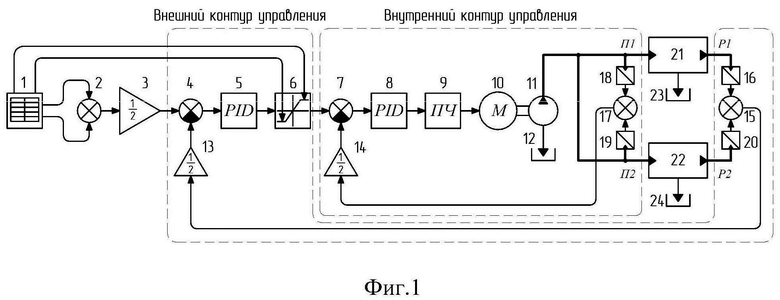
Способ поддержания требуемых значений гидравлического давления при одновременном испытании двух парных гидроаппаратов, включающий формирование сигнала задания для внутреннего контура управления с выхода внешнего контура управления, поступление сигнала задания и сигнала обратной связи для внутреннего контура управления на сумматор формирования сигнала ошибки внутреннего контура управления, вычисление ошибки регулирования сумматором формирования сигнала ошибки внутреннего контура управления, представляющей собой разность между сигналом задания для внутреннего контура управления и сигналом обратной связи для внутреннего контура, поступление сигнала ошибки регулирования на ПИД регулятор внутреннего контура управления, формирование ПИД регулятором внутреннего контура управления задания частоты вращения для частотного преобразователя, обеспечение частотным преобразователем вращения электродвигателя с заданной частотой, который приводит во вращение гидронасос, забирающий рабочую жидкость из гидробака и подающий ее на входные каналы П1 и П2 левого и правого гидроаппаратов, а также на преобразователь входного давления левого гидроаппарата и преобразователь входного давления правого гидроаппарата, поступление рабочей жидкости через входной канал П1 в левый гидроаппарат, а через входной канал П2 в правый гидроаппарат, изменение частоты вращения электродвигателя, приводящее к изменению производительности гидронасоса и изменяющее давление на входных каналах П1 и П2 левого и правого гидроаппаратов, а также на преобразователе входного давления левого гидроаппарата и преобразователе входного давления правого гидроаппарата, формирование сигнала обратной связи для внутреннего контура управления преобразователем входного давления левого гидроаппарата и преобразователем входного давления правого гидроаппарата, поступление сигналов с преобразователя входного давления левого гидроаппарата и преобразователя входного давления правого гидроаппарата в сумматор входных давлений гидроаппаратов, а затем на усилитель суммы входных давлений гидроаппаратов с коэффициентом усиления 1/2, поступление значений наибольшего и наименьшего предельно допустимого значения давления для выходных каналов Р1, Р2 в сумматор предельно допустимых значений, а далее - на усилитель суммы предельно допустимых значений с коэффициентом усиления 1/2, далее сигнал задания для внешнего контура управления и сигнал обратной связи для внешнего контура управления поступают на сумматор формирования сигнала ошибки внешнего контура управления, который вычисляет ошибку регулирования, представляющую собой разность между сигналом задания для внешнего контура управления и сигналом обратной связи для внешнего контура управления, затем сигнал ошибки регулирования поступает на ПИД регулятор внешнего контура управления, который формирует задание для внутреннего контура управления, которое поступает в блок ограничения задания, причем задание ограничено наибольшим и наименьшим предельно допустимыми значениями давления для входных каналов П1, П2 испытываемых левого и правого гидроаппаратов и поступает от таблицы предельно допустимых значений давлений испытания, формирование сигнала обратной связи для внешнего контура управления преобразователем выходного давления левого гидроаппарата и преобразователем выходного давления правого гидроаппарата, поступление сигналов с преобразователя выходного давления левого гидроаппарата и преобразователя выходного давления правого гидроаппарата в сумматор выходных давлений гидроаппаратов, а затем на усилитель суммы выходных давлений гидроаппаратов с коэффициентом усиления 1/2.
| Способ получения пидидоксамина | 1960 |
|
SU133885A1 |
| СПОСОБ УПРАВЛЕНИЯ ВЫХОДНЫМ ДАВЛЕНИЕМ РАБОЧЕЙ ЖИДКОСТИ НАСОСНОЙ СТАНЦИИ И СТАБИЛИЗАЦИИ ЭТОГО ДАВЛЕНИЯ И НАСОСНАЯ СТАНЦИЯ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2003 |
|
RU2251025C1 |
| СПОСОБ ШТАМПОВКИ МОНОЛИТНЫХ ПАНЕЛЕЙ | 0 |
|
SU222317A1 |
| ГИДРАВЛИЧЕСКИЙ БЛОК РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ | 2020 |
|
RU2730560C1 |
| CN 107524643 A, 29.12.2017. | |||

