Область техники
Настоящее изобретение относится к системе игры с роботами, в которой используются характерные особенности космического пространства.
Предшествующий уровень техники
Как известно, осуществляется строительство МКС (Международной космической станции), завершение которого намечено на 2006 г., и эффективное международное использование космического пространства становится фундаментальной проблемой, которая должна быть решена. Роль Японии в отношении этой международной космической станции заключается в обеспечении испытательного модуля, называемого "Kibou", и в настоящее время вырабатывается и проходит испытание опытной модели полета.
При таких обстоятельствах ожидается все более жесткая конкуренция в разработке технических областей, связанных с освоением космического пространства, и с учетом этого необходимо усилить понимание и образовательный уровень, связанные с космосом и разработками в области освоения космического пространства на национальном уровне. В частности, чтобы разработать различные типы механических устройств и электронных устройств, используемых в конкретных условиях внешней среды космического пространства, необходимо углубить понимание студентов относительно конкретных свойств окружающей среды космического пространства.
Сущность изобретения
С учетом описанных выше обстоятельств задачей настоящего изобретения является углубление понимания конкретных свойств окружающей среды космического пространства.
Для решения этой задачи настоящее изобретение использует структуру, содержащую установку игрового участка в космическом оборудовании, игровые роботы, находящиеся в упомянутом игровом участке, устройство передачи управляющих сигналов, которое обеспечивает управляющий сигнал, принимаемый с Земли, для игровых роботов, видеокамеру для съемки изображения игрового участка, которое служит в качестве изображения участка, передатчик игровых сигналов для передачи на Землю изображения участка, которое служит в качестве игрового сигнала, передатчик управляющих сигналов, обеспеченный на Земле для передачи управляющих сигналов введенных операторами игровых роботов в передающее устройство, приемник игровых сигналов, обеспеченный на Земле, который принимает игровой сигнал от передатчика игровых сигналов, и оборудование широковещательной передачи, которое транслирует игровой сигнал, принимаемый упомянутым приемником игровых сигналов.
В соответствии с изобретением, имеющим этот тип структуры, операторы на Земле осуществляют игру, дистанционно управляя игровыми роботами, размещенными внутри космического оборудования, и таким образом операторы, оставаясь на Земле, могут понять конкретные свойства космической окружающей среды, например условия невесомости, которые отличаются от окружающей среды на Земле.
Краткое описание чертежа
На чертеже дано схематичное изображение системы в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
Описание предпочтительных вариантов осуществления
Ниже со ссылками на чертеж поясняется предпочтительный вариант осуществления системы игры с роботами согласно настоящему изобретению.
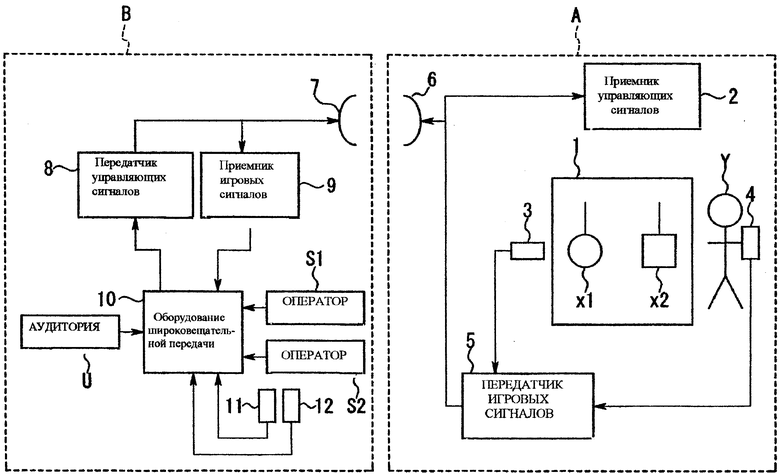
На чертеже показано схематичное изображение системы, соответствующей представленному варианту осуществления. На этом схематичном изображении ссылочной позицией А обозначена Международная космическая станция (космическое оборудование), а В представляет базовую станцию на Земле. Кроме того, на Международной космической станции А ссылочной позицией 1 обозначен игровой участок, 2 - приемник управляющих сигналов, 3 - видеокамера, 4 - микрофон, 5 - передатчик игровых сигналов, 6 - антенна, х1 и х2 - игровые роботы, a Y - персонал космической станции (режиссер). На базовой станции В ссылочной позицией 7 обозначена антенна, 8 - передатчик управляющих сигналов, 9 - приемник игровых сигналов, 10 - оборудование широковещательной передачи, 11 - видеокамера операторов, 12 - микрофон операторов, S1 и S2 - операторы, a U - аудитория.
Игровой участок 1 расположен внутри герметизированной среды испытательного модуля "Kibou", который является частью Международной космической станции А, а игровые роботы х1 и х2 в условиях невесомости помещены внутри трехмерной формы, имеющей заранее определенный объем, чтобы обеспечить возможность перемещения в трехмерном пространстве. Игровые роботы х1 и х2 находятся внутри игрового участка 1. Кроме того, этот игровой участок 1 может также устанавливаться в открытой среде снаружи Международной космической станции А.
Приемник 2 управляющих сигналов принимает управляющий сигнал для дистанционного управления игровыми роботами х1 и х2 через антенну 6, и этот управляющий сигнал передается по радиоканалу каждому из игровых роботов х1 и х2. Видеокамера 3 снимает изображение игрового участка 1, которое служит в качестве изображения участка. Более конкретно, на основании вышеупомянутого управляющего сигнала, манипуляции (игра) с каждым из игровых роботов х1 и х2 поступает на приемник 9 игровой информации посредством записи изображения каждого из игровых роботов х1 и х2, которое служит в качестве изображения игры. Микрофон 4 воспринимает голос персонала Y космической станции как голос режиссера и передает его в приемник 9 игровой информации. Персонал Y космической станции живет на Международной космической станции А и является режиссером, ответственным за развитие игры с использованием игровых роботов х1 и х2.
Игровые роботы х1 и х2 являются роботами боевого типа, которые осуществляют военную игру, перемещаясь в пределах игрового участка 1 во всех направлениях на основании управляющего сигнала, роботами любимого типа, где игроки соревнуются, демонстрируя действия или чувства на основании управляющих сигналов, или роботами гоночного (состязательного) типа, которые соревнуются друг с другом в пространстве перемещения. Передатчик 5 игровых сигналов использует изображение участка и голос режиссера, описанные выше, в качестве игрового сигнала, и затем передает его на базовую станцию В через антенну 6. Антенна 6 транслирует игровой сигнал, поступающий из вышеупомянутого передатчика устройства 5 игровых сигналов, как электромагнитную волну на базовую станцию В. В то же самое время управляющий сигнал, транслируемый с базовой станции В в виде электромагнитного сигнала, захватывается и подается в приемник 2 управляющих сигналов.
Антенна 7 принимает игровой сигнал, транслируемый с вышеупомянутой антенны 6, и в то же время передает управляющий сигнал на антенну 6. Передатчик 8 управляющей информации передает управляющий сигнал, поступающий из оборудования 10 широковещательной передачи, на Международную космическую станцию А через вышеупомянутую антенну 7. Приемник 9 игровой информации принимает игровой сигнал через антенну 7 и направляет его в оборудование 10 широковещательной передачи. Кроме того, антенна 7, передатчик 8 управляющей информации и приемник 9 игровой информации представляют собой оборудование на наземных базах, которое специализируется на осуществлении связи с Международной космической станцией А.
Телевизионная видеокамера 11 операторов снимает изображение операторов S1 и S2, дистанционно управляющих каждым из игровых роботов х1 и х2, и посылает их на оборудование 10 широковещательной передачи. Микрофон 12 операторов воспринимает голоса вышеупомянутых операторов 31 и 32 и посылает их на оборудование 10 широковещательной передачи. Операторы 31 и 32 подают на оборудование 10 широковещательной передачи управляющие сигналы, используя терминал управления для каждого оператора. Оборудование 10 широковещательной передачи представляет собой обычную станцию телевизионного вещания (наземную станцию телевизионного вещания или станции спутникового телевизионного вещания, или известное оборудование широковещательной передачи, которое осуществляет широковещательную передачу в сети Интернет). Аудитория U подсоединяется к оборудованию 10 широковещательной передачи через Интернет и передает информацию оценки игры и т.п. на оборудование 10 широковещательной передачи.
Далее поясняется работа системы, соответствующей описываемому варианту осуществления.
В данном варианте осуществления, как следует из описанной выше структуры системы, при рассмотрении изображения игры наземные операторы 31 и 32 осуществляют игру, дистанционно управляя игровыми роботами х1 и х2, которые размещены на игровом участке 1. Кроме того, состояние 1 игры, то есть изображения игры игровых роботов х1 и х2, и направляющие голоса персонала Y космической станции передаются на базовую станцию В с Международной космической станции А для использования в качестве игрового сигнала и транслируются для общей аудитории U.
В случае, если игровые роботы х1 и х2 являются роботами боевого типа, каждый из игровых роботов х1 и х2 осуществляет военную игру, перемещаясь во всех направлениях в пределах игрового участка 1 на основе управляющих сигналов. Персонал Y космической станции объявляет состояние развития военной игры и в то же самое время оценивает победителя и побежденного на основе заранее определенных правил, которые были установлены заблаговременно. Кроме того, изображения операторов и голоса операторов S1 и S2, которые управляют игровыми роботами х1 и х2, транслируются для аудитории U как часть состояния игры.
Напротив, в случае, когда игровые роботы х1 и х2 представляют собой роботов типа любимого персонажа, каждый из операторов S1 и S2 посредством дистанционного управления заставляет игровых роботов х1 и х2 демонстрировать различные выражения или принимать различные позы. Кроме того, игровые изображения этих поз и выражений передаются для аудитории U, наряду с режиссерскими голосами персонала космической станции Y. Аудитория U передает через Интернет на оборудование 10 широковещательной передачи в режиме реального времени результат решения, например который из роботов типа любимого персонажа является лучшим, и превосходство игровых роботов х1 и х2 определяется путем подведения итогов этих решений.
В соответствии с этим типом настоящего варианта осуществления с помощью дистанционного управления игровыми роботами х1 и х2, которые находятся в условиях невесомости, наземные операторы S1 и S2 изучают, как следует конструировать игровых роботов х1 и х2, чтобы перемещать их в такой окружающей среде, как намечено, и могут овладевать основами дистанционного управления или аналогичными навыками.
Кроме того, из-за отдаленности Земли и Международной космической станции друг от друга происходит временная задержка от того момента, когда операторы S1 и S2 посылают управляющий сигнал, и до момента фактического перемещения игровых роботов х1 и х2. Таким образом, операторы S1 и S2 могут изучать конструкцию и способы управления для игровых роботов х1 и х2, учитывая такие задержки управления.
Это означает, что в соответствии с рассматриваемым вариантом осуществления, каждый из операторов S1 и S2 может углублять свое понимание специфических особенностей космической окружающей среды, находясь на Земле.
Помимо этого, настоящее изобретение не ограничено описанным выше вариантом осуществления и можно рассмотреть, например, следующие примеры.
а. В случае, например, когда игровые роботы х1 и х2 являются роботами типа любимого персонажа, персонал космической станции Y может управлять каждым из роботов х1 и х2 с помощью радиосвязи. В этом случае в сети Интернет можно обеспечить специализированный сервер, можно принимать запросы от аудитории U на танец, позы и т.п., и на основе этих запросов персонал Y космической станции может управлять каждым из игровых роботов х1 и х2 с помощью радиосвязи. В этом случае результаты решений аудитории U принимаются специализированным сервером, и аудитория U уведомляется о конечных результатах игры через специальную базовую страницу на специализированном сервере. Кроме того, в этом случае телевизионные видеокамеры 3, которые снимают изображение участка, предусматриваются во множестве местоположений на игровом участке 1, и на основе запросов от аудитории U можно переключать изображения участка.
b. Количество игровых роботов х1 и х2 не ограничено, и можно использовать 3 робота или больше.
с. Игровых роботов х1 и х2 можно конструировать таким образом, чтобы они работали автономно на основании программы, введенной в них заранее.
d. Кроме того, в случае роботов гоночного типа или роботов любимого персонажа они могут участвовать в гонках или обеспечивать игру или действия индивидуально.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ НАЗЕМНЫЙ СПЕЦИАЛЬНЫЙ КОМПЛЕКС ПРИЕМА И ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2010 |
|
RU2460136C2 |
| СИСТЕМА И СПОСОБ ПЕРЕДАЧИ ПРЕДУПРЕЖДЕНИЙ ЧЕРЕЗ РАДИОВЕЩАНИЕ | 2007 |
|
RU2436253C2 |
| ИГОРНОЕ ОБОРУДОВАНИЕ ДЛЯ ПРОФЕССИОНАЛЬНОЙ ИГРЫ В НАСТОЛЬНЫЕ ИГРЫ, В КОТОРЫХ ИСПОЛЬЗУЮТСЯ ИГРАЛЬНЫЕ КАРТЫ И ИГРОВЫЕ ФИШКИ, В ЧАСТНОСТИ ДЛЯ ИГРЫ В "БЛЭК ДЖЕК" | 1995 |
|
RU2139748C1 |
| УСТРОЙСТВО, СПОСОБ И СИСТЕМА ОБРАБОТКИ ИНФОРМАЦИИ, ТЕРМИНАЛ И СПОСОБ ПРИЕМА ДАННЫХ, И СИСТЕМА ШИРОКОВЕЩАТЕЛЬНОЙ ПЕРЕДАЧИ ДАННЫХ | 1999 |
|
RU2236703C2 |
| Мобильный радиотелевизионный комплекс | 2023 |
|
RU2836656C1 |
| Космический мобильный робот-инспектор | 2022 |
|
RU2783640C1 |
| Способ оценки качества приёма и акустического воспроизведения радиосистем транспортных средств | 2021 |
|
RU2752042C1 |
| СПОСОБ И СИСТЕМА ИНТЕРАКТИВНОГО СОЗДАНИЯ КИНОПРОДУКТОВ "БУРИМЕ" | 2012 |
|
RU2536381C2 |
| ПРОТОКОЛ БЕСПРОВОДНОЙ СВЯЗИ ИГРОВОГО ТЕРМИНАЛА ДЛЯ ПЕРИФЕРИЙНЫХ УСТРОЙСТВ | 2006 |
|
RU2400932C2 |
| ЗАДАНИЕ ПОСЛЕДОВАТЕЛЬНОСТИ КОНТЕНТА | 2011 |
|
RU2607236C2 |
Изобретение относится к системе игры с роботами. Технический результат состоит в изучении свойств окружающей среды. Для этого устройство содержит установку игрового участка в космическом оборудовании, игровые роботы, которые размещены в пределах игрового участка, управляющий сигнал, устройство передачи для обеспечения управляющего сигнала, принимаемого с Земли, для игровых роботов, устройство видеосъемки, снимающее изображение игрового участка, которое служит в качестве изображения участка, передатчик игровых сигналов, который передает изображение участка на Землю в качестве игрового сигнала, передатчик управляющих сигналов, который расположен на Земле и передает в передатчик управляющие сигналы, управляющий сигнал, подаваемый операторами игровых роботов, приемник игровых сигналов, который расположен на Земле и принимает игровой сигнал от передатчика игровых сигналов, и оборудование широковещательной передачи, которое транслирует игровой сигнал, принимаемый приемником игровых сигналов. 8 з.п. ф-лы, 1 ил.
| СИСТЕМА ИГРОВЫХ УСТРОЙСТВ | 1996 |
|
RU2174258C2 |
| СПОСОБ ВВОДА ИНФОРМАЦИИ В КОМПЬЮТЕР | 1996 |
|
RU2123718C1 |
| Водорастворимая полиэфирная смола в качестве пленкообразующего для лакокрасочных покрытий и способ ее получения | 1976 |
|
SU621688A1 |
| Способ получения сернокислого бария для целей рентгенографии | 1928 |
|
SU15081A1 |

