Область техники.
Изобретение относится к робототехнике, а именно к мобильным микророботам космического назначения, и предназначено, преимущественно, для осуществления инспекционных работ на солнечных батареях (СБ) космических аппаратов (КА), Международной космической станции (МКС) и/или Российской национальной орбитальной служебной станции (РОСС) в экстремальных ситуациях, для минимизации рисков человека (космонавта) в условиях открытого космоса, а также для оказания космонавтам технической поддержки при осуществлении внекорабельной деятельности и для решения других перспективных работ на внешней поверхности КА.
Уровень техники.
Из уровня техники известно техническое решение [1]. Согласно известному техническому решению робот содержит размещенные в корпусе устройства для перемещения робота блок обнаружения препятствия, блок определения текущего местоположения робота и блок наблюдения за пространством перед роботом, соединенные посредством информационных каналов с блоком управления, и источник питания. Блок наблюдения за пространством перед роботом подключен к видеокамере наблюдения. Робот имеет перемещающееся средство с размещенными на нем станцией мобильной связи, выполненной с возможностью доступа в ИНТЕРНЕТ, и пультом дистанционного управления в виде персонального компьютера, соединенного информационным каналом со станцией мобильной связи. Устройство для перемещения робота выполнено в виде самодвижущейся тележки, которая кинематически связана с перемещающимся средством. Блок обнаружения препятствия снабжен установленными на корпусе самодвижущейся тележки передатчиком и приемником ультразвукового сигнала. Источник питания соединен с блоком определения пройденного роботом расстояния, блоком измерения ускорения при движении робота и со станцией мобильной связи и персональным компьютером.
Основным недостатком известного устройства является низкая функциональность при инспекции внешних поверхностей космического аппарата в условиях космического пространства и невозможность его эксплуатации в условиях космоса из-за воздействия дестабилизирующих факторов космического пространства. Например, диапазон температур окружающей среды для аппаратуры, устанавливаемой на внешней поверхности космических аппаратов, без применения специальных мер защиты, находится в пределах от минус 150 до +125°С [2]. Рабочий диапазон же температур радиоизделий, в том числе специального назначения, от минус (40…60) °С до плюс (85…125) °С, что не позволяет их использовать в аппаратуре, работающей в отрытом космосе без применения специальных мер защиты. Т.е. при низких температурах окружающей среды необходимо применение мер, обеспечивающих нагревание аппаратуры до температур, обеспечивающих нормальное функционирование радиоизделий. Кроме этого, аппаратура, размещаемая на внешней поверхности космического аппарата, должна быть защищена от внешних лучистых тепловых потоков, поступающих от Солнца и приводящих к сильному ее нагреванию и, в то же время, должен ограничиваться отвод тепла от аппаратуры в окружающее пространство, чем не обладает устройство по патенту [1]. Кроме того, известное устройство [1], предназначенное для наземной эксплуатации, не может перемещаться по поверхности космического аппарата в условиях микрогравитации.
Наиболее близким по технической сущности и достигаемому техническому результату является техническое решение «Микросистемный космический робот-инспектор (варианты)», изложенное в [3], которое принято за прототип. Согласно известному техническому решению микросистемный космический робот-инспектор содержит:
- несущую платформу с располагаемыми на ней блоками функциональной нагрузки;
- подвижные исполнительные элементы в виде термомеханических актюаторов в количестве не менее 8, закрепленные с нижней стороны несущей платформы, каждый из которых разделен на основную и дополнительную деформируемые зоны с канавками, соединенные гибкой полиимидной вставкой, при этом канавки в деформируемых зонах термомеханических актюаторов обращены в противоположные направления, на дополнительную деформируемую зону с нижней стороны в месте соприкосновения с поверхностью нанесен адгезионный слой, термомеханические актюаторы расположены как минимум в двух параллельных рядах, образующих как минимум две подвижные «ноги» в каждом из рядов, причем в каждом ряду как минимум 4 термомеханических актюатора, при этом каждая пара термомеханических актюаторов в ряду расположена под углом 180 градусов друг к другу в горизонтальной плоскости и образует подвижную «ногу» микросистемного космического робота-инспектора;
- источник питания.
В качестве блоков функциональной нагрузки робот-инспектор содержит блок беспроводного приема и передачи данных и/или блок регистрации визуальной информации, и/или блок управления перемещением подвижных термомеханических актюаторов с обратной связью. Робот-инспектор функционирует за счет управляемого перемещения не менее, чем в двух направлениях, с возможностями переноса полезной нагрузки, перемещения по разнородным поверхностям в различных плоскостях и функционирования в условиях космического пространства (в невесомости).
Основным недостатком известного устройства является низкая функциональность при инспекции внешних поверхностей космического аппарата в условиях космического пространства.
Предлагаемое изобретение имеет своей целью расширение функциональных возможностей космического робота-инспектора [3] для эксплуатации вне герметичных отсеков космического аппарата в условиях космического пространства за счет устранения указанного недостатка. Сущность изобретения, обеспечивающая достижение поставленной цели, заключается в следующем.
Космический робот-инспектор, содержащий несущую платформу с располагаемыми на ней блоками функциональной нагрузки: блок беспроводного приема и передачи данных, блок регистрации визуальной информации и блок управления перемещением подвижных термомеханических актюаторов с обратной связью, а также подвижные исполнительные элементы в виде термомеханических актюаторов с обратной связью и источник питания, дополнительно оснащен микроконтроллером, приемопередатчиком интерфейса связи с соединителем и съемным кабелем, блоком определения текущего местоположения, блоком определения препятствия, содержащим излучатель инфракрасного (ИК) сигнала и приемник отраженного инфракрасного сигнала, блоком подсветки, датчиком освещенности, экранно-вакуумной теплоизоляцией (ЭВТИ) космического робота-инспектора, автономной системой обеспечения теплового режима (АСОТР) космического робота-инспектора, содержащей датчик температуры, терморегулятор и нагревательный элемент. Для управления космическим роботом-инспектором в герметичном отсеке Российского сегмента международной космической станции (РС МКС) размещен блок управления и контроля (БУК), подключенный проводной связью к базовому блоку беспроводного приема и передачи данных выносного блока, размещенного на внешней поверхности корпуса РС МКС. Выносной блок, покрытый ЭВТИ, кроме базового блока беспроводного приема и передачи данных содержит АСОТР выносного блока, соединенную с первым выходом источника питания герметичного отсека РС МКС, второй выход которого подключен к БУК.
Базовый блок беспроводного приема и передачи данных обеспечивает обмен данными по радиоканалу с блоком беспроводного приема и передачи данных робота-инспектора. Оба блока беспроводного приема и передачи данных конструктивно выполняются на одинаковых печатных платах и имеют одинаковые схемы электрические принципиальные.
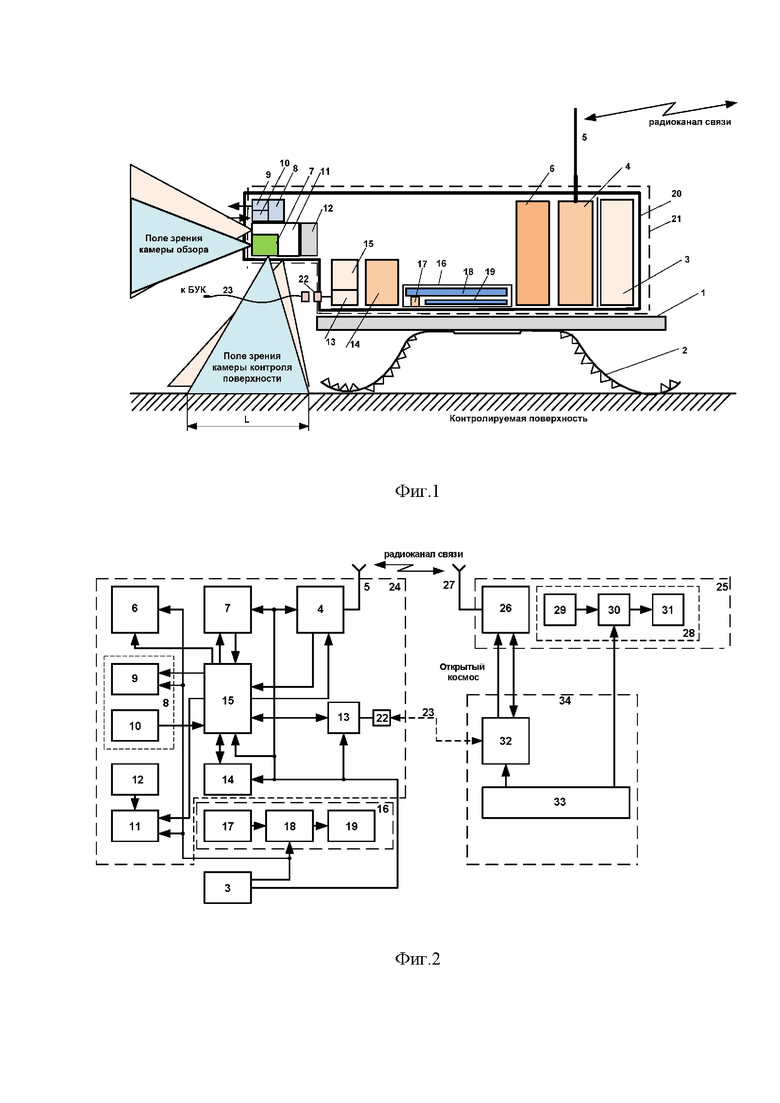
На фиг. 1 условно показан вариант конструкции космического робота-инспектора.
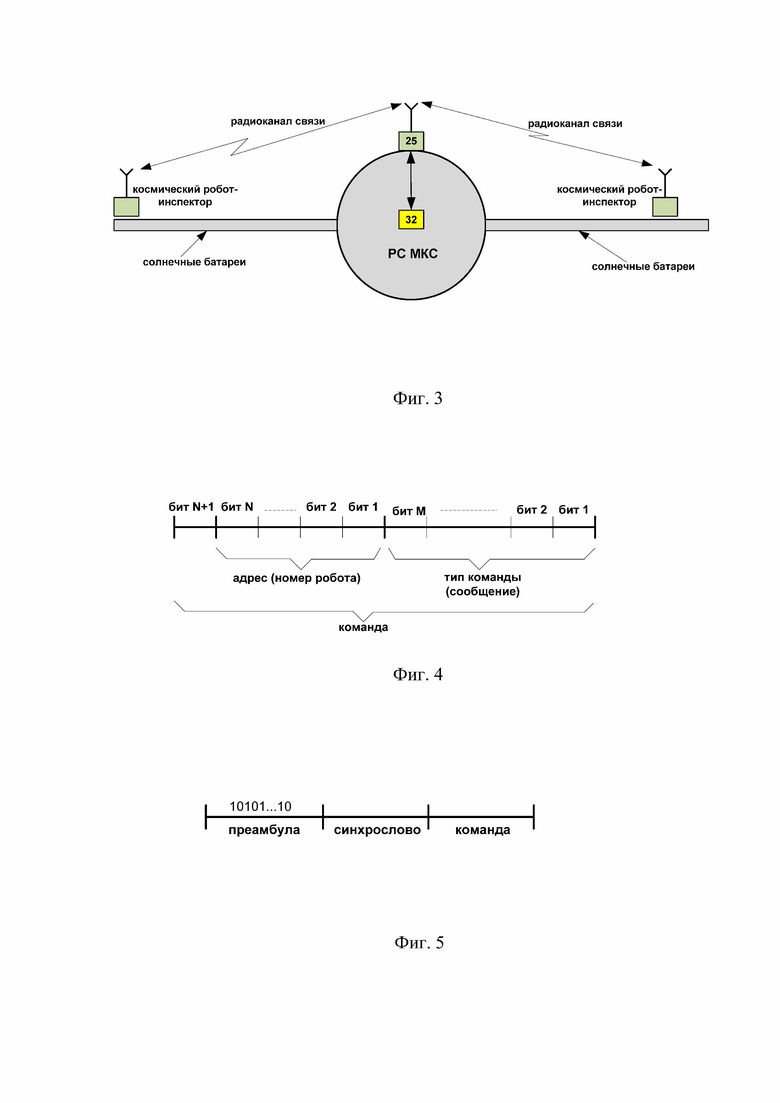
На фиг. 2 представлена функциональная схема космического робота-инспектора. Обозначение функциональных блоков, представленных на фиг. 2 соответствует обозначению блоков, показанных на фиг. 1.
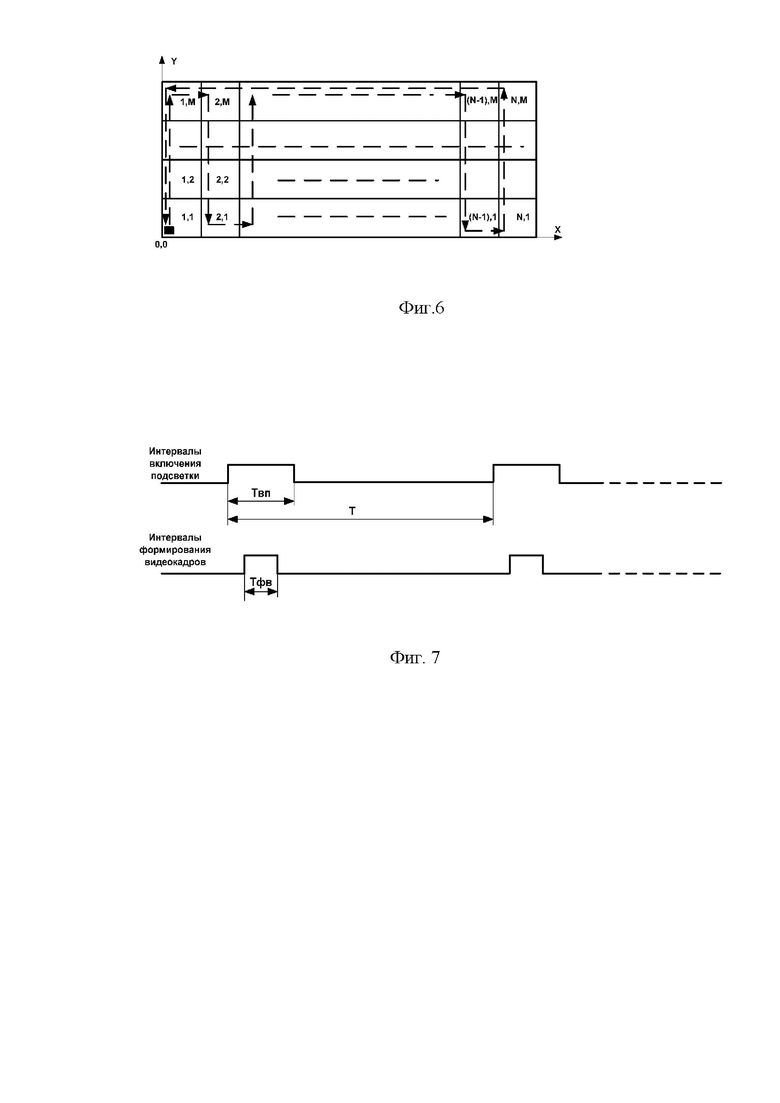
На фиг. 3 условно показано одно из положений космического робота-инспектора на солнечных батареях, а также расположение БУК и выносного блока на РС МКС.
На фиг. 4 показано содержание команды, передаваемой БУК на космический робот-инспектор.
На фиг. 5 показана структура пакета данных, передаваемых космическому роботу-инспектору, содержащему преамбулу, синхрослово и непосредственно команду.
На фиг. 6 показан условный маршрут движения космического робота-инспектора.
На фиг.7 показаны временные диаграммы работы блока подсветки и блока регистрации визуальной информации.
На фиг. 1 и фиг.2 показаны: несущая платформа 1, подвижные исполнительные элементы 2 в виде термомеханических актюаторов в количестве не менее 8, закрепленные с нижней стороны несущей платформы, источник питания 3 космического мобильного робота-инспектора, блок беспроводного приема и передачи данных 4, содержащий выносную антенну 5, блок управления перемещением подвижных исполнительных элементов в виде термомеханических актюаторов с обратной связью 6, блок регистрации визуальной информации 7, блок определения препятствия 8, содержащий излучатель инфракрасного сигнала 9 с использованием инфракрасного диода и приемник отраженного инфракрасного сигнала 10 с использованием фотодиода, блок подсветки 11, датчик освещенности 12, приемопередатчик интерфейса связи 13, блок определения текущего местоположения 14, микроконтроллер 15, АСОТР космического робота-инспектора 16, содержащую датчик температуры 17, терморегулятор 18 и нагревательный элемент 19. Указанные функциональные блоки размещаются в корпусе 20 из алюминиевого сплава АМг, который покрывается ЭВТИ космического робота-инспектора 21. Для обеспечения подсветки, а также работы видеокамер и датчика освещенности в ЭВТИ 21 и в корпусе 20 космического робота-инспектора имеются соответствующие отверстия. Корпус 20 устанавливается на несущей платформе 1. Для обеспечения возможности подключения БУК к космическому роботу-инспектору с помощью кабеля 23 с целью съема накопленной в процессе работы информации (см. далее в описании режим работы 2), на корпусе 20 установлен соединитель 22, электрически связанный проводным соединением с приемопередатчиком интерфейса связи 13. В рабочем положении, когда космический робот-инспектор перемещается по контролируемой поверхности, кабель 23 от робота-инспектора отсоединен.
На фиг.2 позиция 24 включает в себя блоки функциональной нагрузки робота-инспектора.
Источник питания 3 робота-инспектора имеет два выхода. Один выход, обеспечивающий больший по отношению к другому выходной ток и большее по величине напряжение, подключен к блоку управления перемещением подвижных исполнительных элементов в виде термомеханических актюаторов с обратной связью 6, излучателю инфракрасного сигнала 9 с использованием инфракрасного диода блока определения препятствий 8, блоку подсветки 11 и терморегулятору 18 АСОТР 16. Другой выход источника питания 3 подключен к блоку регистрации визуальной информации 7, блоку беспроводного приема и передачи данных 4, приемопередатчику интерфейса связи 13, блоку определения текущего местоположения 14 и микроконтроллеру 15.
Для дистанционного управления роботом-инспектором используется выносной блок 25, размещенный на внешней поверхности РС МКС (фиг.3). Выносной блок 25 содержит базовый блок беспроводного приема и передачи данных 26 с выносной антенной 27 и АСОТР выносного блока 28, содержащей датчик температуры АСОТР выносного блока 29, терморегулятор АСОТР выносного блока 30 и нагревательный элемент АСОТР выносного блока 31. Конструктивно выносной блок 25 выполнен в виде металлического корпуса (сплав АМг), обтянутого ЭВТИ выносного блока (на фиг.2 не показаны).
Базовый блок беспроводного приема и передачи данных 26 с помощью проводного соединения связан с БУК 32. Питание на БУК 32 и АСОТР 28 выносного блока подается от источника питания 33.
БУК 32 размещается внутри герметичного отсека РС МКС 34, там же находится космонавт, который управляет работой робота-инспектора. Источник питания 33 системы управления может размещаться как внутри герметичного отсека РС МКС 34 (как показано на фиг. 2), так и в других служебных отсеках вне его (на фиг.2 не показано).
Работа робота-инспектора и системы управления роботом описана ниже.
Основное назначение робота-инспектора - контроль состояния поверхности космического аппарата, в частности состояния поверхности солнечных батарей в условиях космического пространства, а также передача видеокадров с изображением контролируемой поверхности в БУК, размещенного в герметичном отсеке РС МКС, для визуального отображения на экране монитора БУК с целью определения дефектного участка.
Одно из важнейших требований, предъявляемых к функциональным блокам робота-инспектора, - минимальные габариты, масса, а также потребляемая мощность.
Скорость перемещения робота-инспектора, взятого в качестве наиболее близкого прототипа [3] лежит в диапазоне до 10 мм/мин. При такой достаточно низкой скорости перемещения нет необходимости передавать так называемое «живое видео» со скоростью 25 кадров/с, что обеспечивают в большинстве случаев телевизионные камеры. Достаточно передать видеокадр с изображением контролируемой поверхности на длине L, что обеспечивается соответствующим углом поля зрения телевизионной камеры (см. фиг. 1). После перемещении робота-инспектора на длину L снова формируется видеокадр, который по радиоканалу передается в блок управления и контроля 32 или запоминается в запоминающем устройстве микроконтроллера 15 космического робота-инспектора и т.д. Например, при длине L=150 мм и скорости перемещения робота-инспектора 10 мм/мин периодичность формирования видеокадра составляет 15 мин.
Блок регистрации визуальной информации 7 содержит телевизионную камеру обзора пространства перед роботом, телевизионную камеру контроля поверхности, а также блок захвата видеоизображения и сжатия видеокадра.
Видеозахват изображения (одного видеокадра) осуществляется в соответствующее время после прохождения роботом расстояния L по сигналу с микроконтроллера 15. Сжатие видеокадра применяется для уменьшения ресурсов, необходимых для хранения и передачи данных. Так, для того, чтобы передать один кадр от телевизионной камеры с матрицей 320 х 240 пикселей и 16 битным кодированием цвета, нужно через последовательный интерфейс передать 153600 байт (320 х 240 х 16 бит), а на стандартной скорости 115200 бит/с это занимает около 10 с. При использовании алгоритмов сжатия таких как JPEG, JPEG2000, MPEG, MPEG4 и др. время передачи видеокадра сокращается в 10-15 раз и составляет около 1 с и менее.
В блоке регистрации визуальной информации можно применить, например, миниатюрные видеомодули C328R, JC405M-W01 и др., которые уже содержат в себе, в интегрированном виде, устройства захвата и сжатия видеокадра, а также формирования видеокадра в формате JPEG и передачи по последовательному каналу связи UART (Universal asynchronous receiver/transmitter - универсальный асинхронный приемопередатчик, поддерживает распространенный физический протокол передачи данных), тем самым исключая необходимость применения дополнительных аппаратных и программных средств для реализации алгоритма сжатия изображения и передачи его по последовательному каналу связи.
Применение миниатюрного видеомодуля с устройством захвата и сжатия видеокадра, а также большая периодичность (около 10 мин) формирования видеокадра и незначительное время его передачи (1 с и менее) позволяет использовать радиоканал передачи цифровых данных в широком частотном диапазоне, например, от 430 МГц до 6 ГГц. В указанном диапазоне частот могут быть применены миниатюрные радиомодули нелицензионного диапазона частот (430-434) МГц, например, RFM22B, RFM12DP фирмы HOPERF ELECTRONIC, нелицензионного диапазона частот (2400 - 2483,5) МГц или (5100-5905) МГц nRF24L01 фирмы NORDIC SEMICONDUCTOR и др. (см. п. 14 и 15 формулы изобретения).
Передача отдельных, относительно редких, неповторяющихся видеокадров, в отличие от потокового видео, позволяет сэкономить ресурс источника питания.
Центральным звеном космического робота-инспектора является микроконтроллер, который управляет практически всеми его радиоэлектронными блоками.
Работа робота-инспектора осуществляется в двух режимах:
1) режим 1 - передвижение робота-инспектора и оценка состояния инспектируемой поверхности в режиме реального времени при участии космонавта, когда он управляет роботом-инспектором с помощью БУК, размещенного в герметичном отсеке РС МКС;
2) режим 2 - автономная работа робота-инспектора по заданной программе в режиме сбора информации с возможностью накопления и хранения данных в энергонезависимом запоминающем устройстве микроконтроллера космического робота-инспектора с их последующим считыванием и вводом в БУК на рабочем месте оператора-космонавта для анализа и отображения данных.
Режим 1.
До начала движения космический робот-инспектор размещается космонавтом в заданную точку контролируемой поверхности с условными координатами (00). Это может быть начальный участок солнечных батарей, расположенный ближе к месту выхода космонавта в отрытый космос. Траектория движения может быть такой же, как показано на фиг.6.
Для управления космическим роботом-инспектором можно выделить следующие типы команд, определяющие движение робота-инспектора: «старт», «вперед», «назад», «влево», «вправо», «стоп», а также команды на изменение режима работы, выдачи роботом видеокадра с изображением пространства перед роботом и/или контрольной поверхности в произвольный момент времени и т.п. Для контроля поверхности космического аппарата, в частности контроля поверхности солнечных батарей, могут быть использованы несколько (множество) космических роботов-инспекторов. В этом случае применяется система дистанционного управления с адресацией передачи команд от БУК к конкретному космическому роботу-инспектору. В адресной части команды содержится код условного номера робота, при этом на команды реагирует только тот робот, которому присвоен данный номер (фиг. 4). Количество управляемых космических роботов-инспекторов в данном случае определяется как Р = 2N, где N- число бит в адресной части команды. Каждой команде управления соответствует свой двоичный код определенной длины с различным сочетанием нулей и единиц (фиг. 4). Если используется М бит для кодирования типа команды, то число таких команд определяется как К = 2M. Если команда предназначена конкретному космическому роботу-инспектору, бит (N+1) принимает значение 0. Возможно использование общей (циркулярной) команды для всех космических роботов-инспекторов, например, «старт», в этом случае бит N+1 принимает значение 1 и независимо от кодового значения в битах 1, 2…N все космические роботы-инспекторы принимают, декодируют и исполняют данную команду одновременно.
Команда управления космическим роботом-инспектором формируется космонавтом с помощью блока управления и контроля 32, которая в цифровом кодированном виде по проводной линии связи поступает в базовый блок беспроводного приема и передачи данных 26. Базовый блок беспроводного приема и передачи данных 26 передает принятую команду по радиоканалу в модифицированном виде (фиг. 5) в блок беспроводного приема и передачи данных 4. Модификация (преобразование) команды обоснована тем, что передача данных в цифровых системах связи осуществляется в соответствии с определенным протоколом кодирования, т.е. набором правил, в соответствии с которыми передаются данные. Общая структура сигнала в протоколе имеет вид, представленной в [4].
На фиг. 5 представлена общая структура сигнала, используемая для передачи команды для космического робота-инспектора. Передаваемая команда начинается с преамбулы, представляющей собой последовательность из чередующихся нулей и единиц, затем формируется синхрослово, после которого передается непосредственно команда.
При передаче преамбулы осуществляется тактовая синхронизация и декодирующее устройство блока беспроводного приема и передачи данных 4 подготавливается к приему данных. При этом схема тактовой синхронизации декодирующего устройства (на фиг. 2 не показано) блока беспроводного приема и передачи данных 4 осуществляет автоподстройку фазы его внутренних тактовых импульсов по принимаемому сигналу таким образом, чтобы рассогласование фазы внутренних тактовых импульсов декодирующего устройства блока беспроводного приема и передачи данных 4 и генератора тактовых импульсов кодирующего устройства (на фиг. 2 не показано) базового блока беспроводного приема и передачи данных 26 было минимальным.
Синхрослово используется для осуществления цикловой синхронизации, с помощью которой определяется начало передачи непосредственно команды, т.е. момента времени, с которого осуществляется обработка кода команды в декодирующем устройстве блока беспроводного приема и передачи данных 4. В качестве синхрослова можно использовать, например, 16 разрядный код, имеющий вид 111101011001000.
При передаче цифровых данных по радиоканалу существует вероятность того, что принятые данные будут содержать ошибки. Повышение требований к достоверности передачи информации приводит к необходимости применения специальных мер, уменьшающих вероятность появления ошибок. Одной из них является применение помехоустойчивого кодирования. Под помехоустойчивыми понимают коды, позволяющие обнаруживать и исправлять ошибки, возникающие при передаче из-за действия помех. Один из наиболее эффективных кодов, позволяющий обнаруживать ошибки - линейный блоковый код Хемминга. Код образуется путем добавления к информационной части передаваемого блока, состоящего из К бит, R проверочных элементов [5]. Для обеспечения помехоустойчивости и надежности цифрового радиоканала связи в блоке беспроводного приема и передачи данных 4 и базовом блоке беспроводного приема и передачи данных 26 целесообразно, например, применить кодек цифрового канала с использованием кода Хемминга (8.4), обеспечивающего обнаружение двукратных и исправление однократной ошибки в 4-битном слове (число 8 показывает, что кодовое слово содержит 8 бит, а число 4 - что длина информационного блока равна 4 бит, число проверочных бит - 4).
Принятая в формате, представленном на фиг. 5, команда в блоке беспроводного приема и передачи данных 4 преобразуется к виду, представленному на фиг. 4. С выхода блока беспроводного приема и передачи данных 4 команда поступает в микроконтроллер 15, где декодируется. В зависимости от типа команды микроконтроллер 15 формирует сигналы управления, которые поступают на тот или иной функциональный блок, например, на блок управления перемещением подвижных термомеханических актюаторов с обратной связью 6 для изменения направления движения робота-инспектора. Для подтверждения приема команды микроконтроллер 15 формирует ответное сообщение, подтверждающее выполнение данной команды, которое в обратном порядке вначале передается в блок беспроводного приема и передачи данных 4, а затем в модифицированном виде по радиоканалу передается в базовый блок беспроводного приема и передачи данных 26, а далее поступает в БУК 32 и отображается на экране его монитора. Информационное сообщение, подтверждающее прием команды, может быть такого же формата, как и команда (фиг. 4).
В случае, если ответное сообщение в течение заданного времени в БУК 32 не поступило, передача команды роботу повторяется автоматически. Если при повторении передачи одной и той же команды несколько раз ответных сообщений от блока беспроводного приема и передачи данных 4 космического робота-инспектора в БУК не поступило, последний принимает решение о неисправности канала связи. В данном случае на экране монитора БУК отображается сообщение «Неисправность канала связи». В тоже время робот-инспектор также контролирует наличие радиосвязи по поступающим от БУК ответным сообщениям, подтверждающим прием видеокадров или другой информации от робота-инспектора. Если ответные сообщения от БУК в течение заданного времени не поступают, микроконтроллер робота-инспектора принимает решение о неисправности канала связи. При этом робот-инспектор с помощью встроенной в микроконтроллер программы может возвратиться в исходную точку по запомненному в блоке определения местоположения пройденному маршруту движения в обратном порядке (обратной последовательности, см. фиг. 6). На фиг.6 условно в виде пунктирной линии и стрелок показан один из вариантов маршрута движения робота-инспектора, при котором робот-инспектор, пройдя весь маршрут, возвращается в исходную точку.
Как было отмечено выше, блок регистрации визуальной информации 7 содержит обзорную видеокамеру, видеокамеру контроля поверхности, а также блок захвата видеоизображения и сжатия видеокадра. Возможна отдельная реализация блока захвата видеоизображения и сжатия видеокадра. В этом случае при формировании видеокадров вначале к блоку захвата видеоизображения и сжатия видеокадра подключается выход одной видеокамеры, а затем другой. Возможно, как было описано выше, применение видеомодулей с встроенным устройством захвата и сжатия видеокадра. В предлагаемом изобретении в блоке регистрации визуальной информации 7 используются видеокамеры с встроенным устройством захвата и сжатия видеокадра.
Периодически по сигналу с микроконтроллера 15 блок регистрации визуальной информации 7 с помощью обзорной камеры и видеокамеры контроля поверхности формирует два видеокадра (один с изображением пространства перед роботом, другой с изображением участка контролируемой поверхности), которые последовательно передаются в цифровом виде в микроконтроллер 15. Микроконтроллер 15 осуществляет дополнительную обработку видеокадров: «разбивает» видеокадры на отдельные пакеты цифровых данных определенной длины, например, такой же, как и при передаче команды, удобные для передачи по последовательному каналу в блок беспроводного приема и передачи данных 4. Указанные видеокадры блоком беспроводного приема и передачи данных 4 последовательно передаются по радиоканалу на базовый блок беспроводного приема и передачи данных 26, а затем по проводной линии связи в БУК 32 для хранения и отображения на экране его монитора. По соответствующей команде может быть установлен такой режим работы космического робота-инспектора, при котором формируются только видеокадры контролируемой поверхности.
Из описания следует, что в первом режиме космонавт должен не только управлять роботом-инспектором, но и тратить время на анализ каждого видеокадра, передаваемого роботом-инспектором, на наличие дефектных участков. Для облегчения работы космонавта блок регистрации визуальной информации 7 снабжен устройством автоматического распознавания дефектов на контролируемой поверхности. Например, микроконтроллер со специальным программным обеспечением. В этом случае на БУК от робота-инспектора (при помощи микроконтроллера 15, блока регистрации визуальной информации 7 с устройством автоматического распознавания дефектов на контролируемой поверхности и блока беспроводного приема и передачи данных 4) можно передавать только видеокадры, содержащие дефектные поверхности. В структуре пакета данных, содержащего видеокадр с дефектной поверхностью, может содержаться специальный маркер в виде двоичного кода. При приеме такого видеокадра БУК выдает специальный звуковой сигнал для привлечения внимания космонавта. На экране монитора БУК будет изображаться схематически контролируемая поверхность с элементами, как показано на фиг. 6, а с помощью, например, выделения цветом будет отображаться дефектный участок.
Существуют различные стандарты (способы) передачи данных относительно большого объема пакетами, которые могут быть применены для передачи видеокадров, например, ZigBee, Blutooth, IEE802.11 [6, 7].
В качестве микроконтроллера может быть использована микросхема с энергонезависимой памятью, например, 1887ВЕ7Т.
Чтобы определить какой из роботов-инспекторов передал данные (сообщение или видеокадр), в них содержится код номера робота, передавшего эти данные.
Каждый раз в момент формирования видеокадра блок определения текущего местоположения 14 выдает по запросу в микроконтроллер 15 условные координаты местоположения робота относительно нуля координат, например, относительно точки начала движения. Координаты местоположения космического робота-инспектора вместе с видеокадром затем передаются в БУК 32.
Одновременно с видеокадром и условными координатами местоположения от робота-инспектора может поступать служебная информация, например, текущая температура корпуса робота, обеспечиваемая АСОТР. При этом значение температуры может поступать в микроконтроллер 15 от терморегулятора 18. В процессе работы все видеокадры и другая информация с привязкой к текущему времени записывается в энергонезависимую память БУК 32.
В качестве БУК может быть использован ноутбук или консоль оператора с монитором. В БУК загружается специальная программа, обеспечивающая не только формирование команд, но и отображение на экране монитора поступающих в формате JPEG видеокадров, а также местоположения робота на условной схеме маршрута движения с указанием условных координат местоположения. При этом оператор-космонавт визуально сам оценивает качество контролируемой поверхности. Момент поступления очередных видеокадров сопровождается выдачей звукового сигнала БУК для привлечения внимания космонавта.
Поверхность космических аппаратов, в том числе РС МКС, не оснащена какими-либо специальными маркерами или ярко нарисованными (флуоресцентными) линиями, по которым с помощью видеокамер можно ориентироваться роботу-инспектору и определять местоположение, как это принято для наземных роботов [8].
В дистанционной системе управления космическим роботом-инспектором можно использовать условную прямоугольную систему координат с началом (ОХ и OY). За начало отсчета принимается точка начала движения робота. Применительно к солнечным батареям: зная, что в ряду находится N элементов батареи, а число рядов М, можно каждому элементу присвоить координату (Xi, Yj) или (Ni, Mj), где i=1…N, j=1…M (см. фиг. 4). Аналогичным образом можно разбить на отдельные участки и любую другую поверхность.
На фиг. 6, в качестве примера, стрелками показан маршрут движения робота при инспекции поверхности. Считая, что скорость движения робота-инспектора приблизительно постоянна, при этом зная время движения и скорость движения робота, а также размеры ячейки, на которые разбита поверхность, можно вычислить текущий пройденный путь или условные координаты местоположения робота (номер ячейки Ni, Mj). Вычисление текущего местоположения робота, моменты изменения направления движения, а также сохранение в энергонезависимой памяти пройденного маршрута осуществляет блок определения текущего местоположения 14.
Космонавт, управляя космическим роботом-инспектором с помощью команд, может задать любую траекторию его движения и изменить ее в любой момент времени.
На экране монитора БУК будет изображаться схематически контролируемая поверхность с элементами, как показано на фиг.6, и стрелкой последовательно маршрут движения робота-инспектора. При поступлении в БУК 32 видеокадра, на его экране отобразится маркер, указывающий текущее местоположение робота-инспектора на условной схеме маршрута движения и в отдельном «окне» (участке экрана) - изображение контролируемого участка.
Космонавт с помощью органов управления БУК и встроенной в БУК программы может выбрать номер любого работающего робота-инспектора и контролировать его перемещение и отображать передаваемые им видеокадры.
Любая информация, поступающая в режиме реального времени от космического робота-инспектора, запоминается в энергонезависимой памяти БУК. В дальнейшем, при необходимости, ее можно повторно воспроизвести на экране монитора БУК и проанализировать.
Режим 2.
В режиме автономной роботы космического робота-инспектора в энергонезависимую память микроконтроллера 15 до начала движения и контроля поверхности записывается программа, в соответствии с которой робот самостоятельно движется по заданному маршруту. До начала движения космический робот-инспектор размещается космонавтом в заданную точку контролируемой поверхности с условными координатами (00). Траектория движения может быть такой же, как показано на фиг.6. Робот должен быть сориентирован для начального движения в направлении, указанного на фиг.6 стрелкой.
По команде «старт», поступающей с БУК, космический робот-инспектор начинает движение по заданной программе. Блок определения текущего местоположения 14 вычисляет пройденный путь и автоматически определяет, когда и в какую сторону изменить направление движения. В этом случае данные от блока определения текущего местоположения 14 поступают в микроконтроллер 15, который формирует управляющие сигналы для блока управления перемещением подвижных термомеханических актюаторов с обратной связью 6. Формирование и передача видеокадров, а также текущих координат местоположения робота и другой служебной информации осуществляется выше описанным способом. Данная информация в режиме реального времени поступает в БУК 32 для анализа и хранения.
Работа космического робота-инспектора может быть организована в режиме 2 (режиме сбора информации) таким образом, что вначале робот-инспектор по заданной программе перемещается по заданному маршруту периодически формируя видеокадры с изображением контролируемой поверхности и пространства перед роботом-инспектором и записывая их в энергонезависимое запоминающее устройство микроконтроллера 15. Одновременно в энергонезависимое запоминающее устройство записываются условные координаты, к которым привязаны видеокадры, а также время формирования видеокадров с точностью, например, до минуты с момента начала движения робота-инспектора (подачи команды «старт»). Накопление информации происходит в течение всего времени движения робота. После того, как робот прибудет в исходную точку с координатами (0,0) он по радиоканалу передает в БУК 32 сообщение о завершении операции инспекции поверхности, которое сопровождается звуковым сигналом и отображается на экране монитора БУК 32.
Затем космонавт переносит робот в герметичный отсек, подключает БУК 32 с помощью кабеля 23 к соединителю 22 блока приемопередатчика интерфейса связи 13 и считывает информацию, хранящуюся в энергонезависимом запоминающем устройстве микроконтроллера 15 через блок приемопередатчика интерфейса связи 13 в БУК 32 для последующего анализа и хранения. Считывание осуществляется под управлением БУК. В качестве приемопередатчика интерфейса связи могут быть использованы микросхемы, например, стандарта RS-485, RS-232 или USB.
В случае, если расчетная емкость энергонезависимого запоминающего устройства микроконтроллера 15 недостаточна для запоминания и хранения накапливаемой информации, можно применить дополнительное энергонезависимое запоминающее устройство, подключенное к микроконтроллеру 15 (на фиг.2 не показано) на базе, например, микросхем Flash- памяти типа AT25DF081A «Adesto Technologies», W25Q64FV «Winbond» и др.
При анализе информации на экране монитора БУК будет изображаться схематически контролируемая поверхность с элементами, как показано на фиг. 6.
Используя специальное программное обеспечение, космонавт может, при необходимости, последовательно осуществлять просмотр каждого участка контролируемой поверхности с привязкой к координатам местоположения этого участка на условной схеме маршрута движения робота (указывается маркером-стрелкой). Используя программные средства автоматического определения дефектного участка (участков) поверхности из накопленных видеокадров можно оперативно, автоматически, произвести анализ и вывести на монитор БУК дефектные участки и координаты их местоположения.
По датчику освещенности 12 определяется светлое и темное время суток. В темное время суток блок подсветки 12 обеспечивает подсветку как контролируемой поверхности, перекрывая поле зрения камеры контроля поверхности, так и подсветку пространства впереди робота-инспектора. Подсветка в темное время суток может быть непрерывной или импульсной. При непрерывной подсветке включение блока подсветки 11 осуществляется по сигналу датчика освещенности 12 и подсветка длится в течение всего темного времени суток. В светлое время суток по сигналу с датчика освещенности 12 блок подсветки 11 автоматически выключается.
С целью экономии ресурса источника питания подсветку можно осуществлять в импульсном режиме по сигналу от микроконтроллера 15. В этом случае при наступлении темного времени суток по сигналу с датчика освещенности 12 блок подсветки 11 переходит в режим формирования импульсов подсветки: вначале по сигналу с микроконтроллера 15 включается на время Твп подсветка, затем по сигналу микроконтроллера 15 в течение времени Тфв формируется видеокадр и подсветка спустя заданное время выключается (см. фиг.7). Твп - продолжительность включенного состояния подсветки, Тфв - продолжительность формирования видеокадра. Сигналы с микроконтроллера 15 формируются таким образом, чтобы формирование видеокадра происходило во время действия подсветки. При этом ток потребляемый блоком подсветки 11 в Q раз меньше, если бы подсветка осуществлялась в темное время суток непрерывно:
Iи = Iн/Q = Iн Твп/T, (1)
где:
Iи - ток, потребляемый блоком подсветки 11, при импульсном включении подсветки; Iн - ток, потребляемый блоком подсветки 11, при непрерывном включении подсветки; Q - скважность включения подсветки;
Твп - продолжительность включенного состояния подсветки; Т - период включения подсветки.
Задание вида подсветки может осуществляется путем программирования микроконтроллера до начала движения робота-инспектора или по команде с БУК 32.
Блок определения препятствия 8 содержит излучатель инфракрасного сигнала 9 с использованием инфракрасного диода и приемник отраженного инфракрасного сигнала 10 с использованием фотодиода. Отраженный от препятствия сигнал меняет свои характеристики. В этом случае приемник отраженного сигнала 10 формирует на выходе сигнал обнаружения препятствия, по которому микроконтроллер 15 формирует информационное сообщение «обнаружено препятствие», которое с помощью блока беспроводного приема и передачи данных 4 передается по радиоканалу в базовый блок беспроводного приема и передачи данных 26, а затем в БУК 32 для отображения на экране монитора. Одновременно с помощью камеры обзора с устройством захвата и сжатия видеокадра формируется и передается в БУК 32 видеокадр с изображением препятствия. После этого оператор-космонавт по команде, формируемой БУК и поступающей в космический робот-инспектор может изменить маршрут движения робота-инспектора. Если робот-инспектор работает в автономном режиме (без участия космонавта), то микроконтроллер 15 совместно с блоком определения местоположения 14 формирует управляющие сигналы для блока управления перемещением подвижных термомеханических актюаторов с обратной связью 6 с целью изменения направления перемещения робота-инспектора и обхода препятствия.
Как вариант реализации, блок определения препятствия 8 может содержать ультразвуковой излучатель и ультразвуковой приемник отраженного сигнала (см. п.7 формулы изобретения).
Терморегулятор 18 вместе с датчиком температуры 17 АСОТР 16 космического робота-инспектора могут быть реализованы, например, на микросхеме 5019ЧТ1Т (зарубежный аналог - DS1620). Микросхема 5019ЧТ1Т представляет собой цифровой термометр и термостат и содержит встроенный датчик температуры. Микросхема обеспечивает получение 9- битных температурных отсчетов, отражающих температуру внутри корпуса космического робота-инспектора, которые при необходимости можно считывать и передавать в БУК в качестве служебной информации. В энергонезависимую память микросхемы можно запрограммировать значения температур Тн и Тв. Тн - нижнее значение температуры окружающей среды, при которой на выходе микросхемы 5019ЧТ1Т формируется сигнал на включение нагревательного элемента. Тв - верхнее значение температуры окружающей среды, при которой на выходе микросхемы 5019ЧТ1Т сигнал на включение нагревательного элемента прекращает действовать.
Плата с микросхемой, в которой содержится датчик температуры и терморегулятор, устанавливается на корпус внутри космического робота-инспектора таким образом, чтобы микросхема через теплопроводящую пасту (например, КПТ-8) контактировала с корпусом, в котором размещены источник питания и функциональные блоки.
При снижении температуры внутренней части корпуса космического робота-инспектора ниже запрограммированной Тн, на выходе микросхемы 5019ЧТ1Т формируется сигнал, по которому включается нагревательный элемент 19 АСОТР космического робота-инспектора. При превышении температуры Тв, запрограммированной в микросхеме 5019ЧТ1Т, сигнал на выходе микросхемы не формируется и нагревательный элемент 19 находится в выключенном состоянии.
АСОТР 16 космического робота-инспектора и АСОТР 28 выносного блока 25 содержат одинаковые датчики температуры и терморегуляторы, выполненные на микросхеме 5019ЧТ1Т. В выносном блоке 25 микросхема термостата так же, как и в космическом роботе-инспекторе, устанавливается на корпус внутри, через теплопроводящую пасту. Отличие АСОТР 16 и 28 может быть в нагревательных элементах. Чем больше объем пространства, в котором размещается АСОТР, тем больше должна быть мощность нагревательных элементов.
В качестве нагревательных элементов для АСОТР 16 и АСОТР 28 целесообразно применить, например, нагреватели серии ПИГН.564512.075ТУ или ПИГН.564512.002ТУ производства АО «НИИЭМ». Нагревательный элемент представляет собой тонкую гибкую одностороннюю печатную плату на тонком диэлектрическом основании из стеклоткани, на котором расположен печатный проводник определенного рисунка из манганиновой фольги, закрытый защитным изоляционным покрытием. Нагревательный элемент (элементы) клеится к корпусу, внутри космического робота-инспектора или выносного блока 25 теплопроводящим клеем. При подаче питания на контактные площадки нагревательного элемента по печатному проводнику протекает электрический ток, в результате чего выделяется тепловая энергия, которая через стеклоткань передается на корпус космического робота-инспектора или выносного блока 25.
ЭВТИ 21 (см. фиг.1) и ЭВТИ выносного блока (на рисунках не показана) является одним из наиболее эффективных средств пассивной тепловой защиты космического робота-инспектора и выносного блока 25 [9]. Использование ЭВТИ позволяет существенно снизить интенсивность лучистого теплообмена космического робота-инспектора и выносного блока с окружающей средой, т.е. она является защитой от внешних лучистых тепловых потоков, поступающих от Солнца, планет на космический робот-инспектор и выносной блок.
ЭВТИ представляет собой пакет из нескольких параллельных отражающих экранов с низкой излучательной способностью, которые отделяются друг от друга прокладками.
Источником питания 3 космического мобильного робота-инспектора являются, например, литиевые аккумуляторные батареи необходимой емкости и с заданными выходными напряжениями, обеспечивающими мобильную работу функциональных модулей робота без подключения внешнего источника питания.
Источники информации:
1. Подураев Ю.В., Ермолов И.Л., Пожидаев И.В. Мобильный робот. // Опубл.: 20.04.2006, бюл. № 11. Пат. RU 2274543
2. Российский сегмент МКС. Справочник пользователя П40463. табл.6.1.2.2
3. Смирнов И.П., Козлов Д.В., Жуков А.А., Чащухин В.Г., Градецкий В.Г., Болотник Н.Н. Микросистемный космический робот-инспектор (варианты)//Опубл.: 27.10.2015, бюл. №30. Пат. RU 2566454
4. Головин О.В., Чистяков Н.И., Шварц В., Хардон Агиляр И. Радиосвязь. под редакцией профессора О.В.Головина, 2-е издание, М.: Горячая линия-Телеком, 2003. стр.195, 196.
5. Угрюмов Е. Цифровая схемотехника.: Санкт Петербург, БВХ-Петербург, 2004.
6. Агафонов Н. Технологии беспроводной передачи данных Zig Bee, BlueTooth, Wi-Fi //Беспроводные технологии, 2006. - №1, с.10-15.
7. Шахнович И.В. Современные технологии беспроводной связи. - Москва: Техносфера, 2006.- 288 с.
8. Власов С.М., Бойков В.И., Быстров С.В., Григорьев В.В. Бесконтактные средства локальной ориентации роботов. УНИВЕРСИТЕТ ИТМО., Санкт-Петербург., 2017.
9. Матвеев Н.К. Экранно-вакуумная теплоизоляция и определение ее характеристик: учебное пособие. Балт. гос. тех. ун-т - СПб., 2012.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОСИСТЕМНЫЙ КОСМИЧЕСКИЙ РОБОТ-ИНСПЕКТОР (ВАРИАНТЫ) | 2014 |
|
RU2566454C2 |
| Ползающий космический микроробот-инспектор | 2021 |
|
RU2771501C1 |
| ТРУБОПРОВОДНЫЙ ДИАГНОСТИЧЕСКИЙ РОБОТ | 2018 |
|
RU2707644C1 |
| Способ проведения натурных испытаний аппаратуры в космосе и система для его осуществления | 2022 |
|
RU2803218C1 |
| РОБОТ-ПЫЛЕСОС С ФУНКЦИЕЙ WI-FI | 2023 |
|
RU2831101C1 |
| МАСШТАБИРОВАНИЕ ОТСЛЕЖИВАЕМОГО ВИДЕО | 2018 |
|
RU2782451C2 |
| Мультиагентная робототехническая система | 2017 |
|
RU2658684C1 |
| МОБИЛЬНЫЙ УЗЕЛ СПУТНИКОВОЙ СВЯЗИ | 2007 |
|
RU2342787C1 |
| Способ наземной и воздушной доставки постановщиков радиопомех с использованием мобильного робототехнического комплекса радиоэлектронной борьбы | 2016 |
|
RU2652914C1 |
| СПОСОБ НАВИГАЦИИ В ПОМЕЩЕНИИ И РАДИОНАВИГАЦИОННЫЙ ДАТЧИК ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2838877C1 |
Изобретение относится к робототехнике, а именно к мобильным микророботам космического назначения, для осуществления инспекционных работ на солнечных батареях (СБ) космических аппаратов (КА). Космический робот-инспектор содержит несущую платформу, микроконтроллер, приемопередатчик интерфейса связи с соединителем и съемным кабелем, систему дистанционного управления, блок определения текущего местоположения робота, блок обнаружения препятствия, содержащий излучатель инфракрасного сигнала и приемник отраженного инфракрасного сигнала, датчик освещенности, блок подсветки, автономную систему обеспечения теплового режима, экранно-вакуумную теплоизоляцию космического робота-инспектора. Система дистанционного управления включает выносной блок, размещаемый на внешней поверхности Международной космической станции (МКС) и содержащий базовый блок беспроводного приема и передачи данных с выносной антенной, автономную систему обеспечения теплового режима выносного блока и экранно-вакуумную теплоизоляцию выносного блока, а также источник питания системы управления и блок управления и контроля, размещаемые в герметичном отсеке МКС. При этом все блоки связаны определенным образом. Повышается надежность конструкции при эксплуатации. 17 з.п. ф-лы, 7 ил.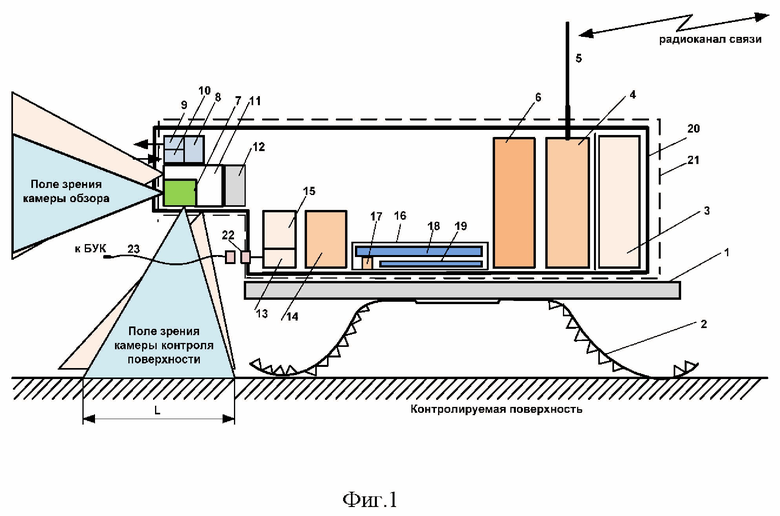
1. Космический робот-инспектор, содержащий несущую платформу, на нижней стороне которой закреплены исполнительные элементы в виде термомеханических актюаторов с обратной связью, а на верхней стороне которой располагаются источник питания и блоки функциональной нагрузки: блок беспроводного приема и передачи данных, блок регистрации визуальной информации, блок управления перемещением подвижных термомеханических актюаторов с обратной связью, отличающийся тем, что робот-инспектор дополнительно содержит микроконтроллер, приемопередатчик интерфейса связи с соединителем и съемным кабелем, блок определения текущего местоположения робота, блок обнаружения препятствия, содержащий излучатель инфракрасного сигнала и приемник отраженного инфракрасного сигнала, датчик освещенности, блок подсветки, автономную систему обеспечения теплового режима, содержащую терморегулятор, датчик температуры и нагревательный элемент, и экранно-вакуумную теплоизоляцию космического робота-инспектора, причем блок беспроводного приема и передачи данных, блок регистрации визуальной информации, блок управления перемещением подвижных термомеханических актюаторов с обратной связью, приемопередатчик интерфейса связи с подключенным соединителем, блок определения текущего местоположения робота, излучатель инфракрасного сигнала, приемник отраженного инфракрасного сигнала и блок подсветки, вход которого соединен с выходом датчика освещенности, по отдельным линиям связи подключены к микроконтроллеру, первый выход источника питания робота-инспектора соединен с блоком беспроводного приема и передачи данных, блоком регистрации визуальной информации, блоком управления, блоком определения текущего местоположения робота и приемопередатчиком интерфейса связи, второй выход источника питания робота-инспектора соединен с блоком управления перемещением подвижных термомеханических актюаторов с обратной связью, излучателем инфракрасного сигнала, блоком подсветки и терморегулятором автономной системы обеспечения теплового режима робота-инспектора, вход которого подключен к выходу датчика температуры, а выход соединен с нагревательным элементом, выход приемопередатчика интерфейса связи через соединитель с помощью кабеля подключается к внешнему устройству; кроме того, космический робот-инспектор снабжен системой дистанционного управления, включающей выносной блок, размещаемый на внешней поверхности МКС и содержащий базовый блок беспроводного приема и передачи данных с выносной антенной, автономную систему обеспечения теплового режима выносного блока и экранно-вакуумную теплоизоляцию выносного блока, а также источник питания системы управления, блок управления и контроля, размещаемые в герметичном отсеке Международной космической станции (МКС), при этом базовый блок беспроводного приема и передачи данных связан проводной линией связи с блоком управления и контроля и первым выходом источника питания системы управления, а второй выход источника питания системы управления соединен с блоком управления и контроля.
2. Космический мобильный робот-инспектор по п. 1, отличающийся тем, что источник питания робота выполнен на основе литиевых аккумуляторных батарей.
3. Космический мобильный робот-инспектор по п. 1, отличающийся тем, что блок регистрации визуальной информации содержит обзорную видеокамеру, видеокамеру контроля поверхности, а также блок захвата видеоизображения и сжатия видеокадра.
4. Космический мобильный робот-инспектор по п. 1, отличающийся тем, что блок регистрации визуальной информации содержит два миниатюрных видеомодуля, выполняющих функции обзорной видеокамеры и камеры контроля поверхности с интегрированными устройствами захвата видеоизображения, сжатия и передачи видеокадра в формате JPEG по последовательному интерфейсу UART.
5. Космический мобильный робот-инспектор по п. 1, отличающийся тем, что блок регистрации визуальной информации содержит устройство автоматического распознавания дефектов на контролируемой поверхности.
6. Космический мобильный робот-инспектор по п. 1, отличающийся тем, что блок обнаружения препятствия содержит излучающий диод в инфракрасном диапазоне спектра и приемник отраженного сигнала с использованием фотодиода.
7. Космический мобильный робот-инспектор по п. 1, отличающийся тем, что блок обнаружения препятствия содержит ультразвуковой излучатель и ультразвуковой приемник отраженного сигнала.
8. Космический мобильный робот-инспектор по п. 1, отличающийся тем, что датчик освещенности содержит фоторезистор.
9. Космический мобильный робот-инспектор по п. 1, отличающийся тем, что датчик освещенности содержит фотодиод.
10. Космический мобильный робот-инспектор по п. 1, отличающийся тем, что блок подсветки содержит излучающие диоды инфракрасного диапазона спектра.
11. Космический мобильный робот-инспектор по п. 1, отличающийся тем, что приемопередатчик интерфейса связи выполнен на базе стандартного интерфейса RS-232.
12. Космический мобильный робот-инспектор по п. 1, отличающийся тем, что приемопередатчик интерфейса связи выполнен на базе стандартного интерфейса RS-485.
13. Космический мобильный робот-инспектор по п. 1, отличающийся тем, что приемопередатчик интерфейса связи выполнен на базе стандартного USB-интерфейса.
14. Космический мобильный робот-инспектор по п. 1, отличающийся тем, что блок беспроводного приема и передачи данных и базовый блок беспроводного приема и передачи данных системы дистанционного управления содержат радиомодули, работающие в нелицензионном диапазоне частот от 430 до 434 МГц.
15. Космический мобильный робот-инспектор по п. 1, отличающийся тем, что блок беспроводного приема и передачи данных и базовый блок беспроводного приема и передачи данных системы дистанционного управления содержат радиомодули, работающие в диапазоне частот Wi-Fi: (2400 – 2483,5) МГц или (5100-5905) МГц.
16. Космический мобильный робот-инспектор по п. 1, отличающийся тем, что базовый блок беспроводного приема и передачи данных системы дистанционного управления содержит экранно-вакуумную теплоизоляцию и автономную систему обеспечения теплового режима.
17. Космический мобильный робот-инспектор по п. 1, отличающийся тем, что блок управления и контроля (БУК) системы дистанционного управления выполнен на базе промышленного ноутбука.
18. Космический мобильный робот-инспектор по п. 1, отличающийся тем, что блок управления и контроля (БУК) системы дистанционного управления содержит консоль оператора и монитор.
| МИКРОСИСТЕМНЫЙ КОСМИЧЕСКИЙ РОБОТ-ИНСПЕКТОР (ВАРИАНТЫ) | 2014 |
|
RU2566454C2 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| CN 113955159 A, 21.01.2022. | |||

