Изобретение относится к способу управления тормозом(ами) эскалатора или движущейся пешеходной дорожки согласно ограничительной части п.1 формулы изобретения.
Для торможения ленты со ступеньками или площадками эскалатора или движущейся пешеходной дорожки при срабатывании защитных элементов в настоящее время применяются в основном механические или электромеханические тормоза, в частности колодочные тормоза. Последние обычно подпружинены, причем действие пружины компенсируется с помощью электромагнита, поэтому в рабочем режиме тормоз находится в разомкнутом состоянии. При остановке эскалатора или движущейся пешеходной дорожки действие электромагнита прекращается и в результате преобладает усилие пружины. Обычно рабочая поверхность тормоза и противовес расположены независимо друг от друга, но, как правило, они образуют взаимосвязанную систему в виде тормозного барабана. Противовес служит для ограничения тормозного пути в заданных пределах. Существенным критерием при расчете противовеса является нагрузка, зависящая от числа пассажиров, а для движущейся пешеходной дорожки - это в основном ее длина в сочетании с нагрузкой на нее от пассажиров.
В случае приведения в действие устройства экстренной остановки, а также при срабатывании предохранительных выключателей и других предохранительных устройств, происходит обесточивание привода. Одновременно включается тормоз.
Недостаток известного тормоза состоит в том, что торможение происходит частично в зависимости от нагрузки, из-за чего не соблюдаются одинаковые тормозные пути, поскольку они зависят от нагрузки, что при определенных конструкционных условиях (например, избыточная длина движущихся пешеходных дорожек) требуются также большие противовесы, в этом случае исчерпываются технические возможности для их размещения. Помимо этого возможен повышенный износ тормозных колодок, в связи с чем из соображений безопасности требуется постоянное регулирование механических тормозов.
В DE-A 3509207 описаны способ и устройство торможения пассажирских скользящих конвейеров, например эскалаторов, при этом движение эскалатора затормаживается, по существу, независимо от нагрузки и направления его движения путем управления. Процесс замедления движения постоянно контролируется и управляется сигналом, подаваемым датчиком скорости, например тахогенератором. На обмотки двигателя переменного тока в качестве приводного двигателя подается постоянный ток, при этом образующееся в двигателе электродинамическое тормозное действие вызывает заданное замедление движения эскалатора. При торможении на обмотки приводного двигателя подается преимущественно пульсирующее постоянное напряжение, которое формируется и управляется посредством тиристорной схемы, управляемой электронными элементами и образующей для эскалатора эталонное значение скорости на основе показания датчика скорости, например тахометра.
В последнее время для торможения пассажирских транспортных установок, в частности эскалаторов и движущихся пешеходных дорожек, стали применять также преобразователи частоты, которые при определенных обстоятельствах делают, по существу, излишним применение механических тормозов в качестве рабочих тормозов. Однако преобразователи частоты являются элементами, повышающими стоимость, и следовательно при определенных обстоятельствах остаются не востребованными потребителями.
В US-A 4664247 описано тормозное контрольное устройство для пассажирских транспортных установок, таких как эскалаторы и движущиеся пешеходные дорожки. Устройством служит датчик, замеряющий скорость пассажирской транспортной установки (фактический показатель), и формирующий аналоговый сигнал скорости с текущим значением. Кроме того, генерируется аналоговый сигнал управления (заданное значение). На участке подключения регулирующего устройства происходит сравнение аналоговых заданного и фактического значений. Регулятор образует управляющий сигнал, воздействующий на тормозной электромагнит тормозного устройства с задержкой таким образом, что обеспечивается мягкое, постепенное замедление, причем фактический показатель должен иметь значение, близкое к заданному. Благодаря этому устройству тормоз должен настраиваться постепенно, т. е. в квазидинамическом виде. В качестве управляющего критерия тормоза предусмотрен дополнительный высокочастотный сигнал, медленно меняющийся в течение задаваемого интервала времени от 100 до 0%, а также от 0 до 100%, в результате чего обеспечивается постоянное, т.е. нелинейное торможение пассажирской транспортной установки. В результате колебаний такого ВЧ сигнала не происходит фактического учета действующей на пассажирскую транспортную установку нагрузки (числа пассажиров), вследствие чего при постоянном торможении пассажирской установки такое торможение в определенных условиях неприятно воспринимается пользователями.
Целью изобретения является усовершенствование способа управления тормозом(ами) эскалатора или движущейся пешеходной дорожки настолько, чтобы создать схему управления, независимую от преобразователей частоты и способную интегрироваться при необходимости в существующие установки независимо от нагрузки на эскалатор или пешеходную дорожку без специальных монтажных и иных затрат.
Указанный технический результат достигается в способе управления тормозом(ами) эскалатора или движущейся пешеходной дорожки, в котором, по меньшей мере, в один регулятор, содержащий, по меньшей мере, одно заданное значение регулируемого параметра, подают фактические значения этого параметра, с помощью регулятора производят сравнение заданного значения с фактическим значением и в соответствии с полученным значением управляют, по меньшей мере, одним тормозным электромагнитом, в зоны или области памяти для заданных значений регулятора записывают в качестве заданных значений временные значения замедления, с помощью регулятора производят периодическое сравнение заданного и фактического значений, и на основе такого сравнения управляют тормозом(ами) независимо от нагрузки, посредством воздействия тормозного электромагнита на тормоз таким образом, что обеспечивают заданное линейное тормозное замедление, при этом в регулятор периодически или постоянно подают фактические значения скорости привода(ов) пассажирской транспортной установки, определяемые датчиками скорости.
При этом управление тормозом(ами) производят в соответствии с нечеткой логикой, а тормозным электромагнитом управляют независимо от электропитания привода.
Благодаря данному способу достигается не зависящее от нагрузки торможение ленты со ступеньками или площадками эскалаторов или движущихся пешеходных дорожек с получением следующих преимуществ:
- всегда одинаковые тормозные пути по причине независимости от нагрузки;
- низкий уровень износа тормоза, в частности, тормозных колодок колодочных тормозов;
- по меньшей мере, частичное уменьшение массы противовеса;
- по меньшей мере, частичное уменьшение габаритов приводного двигателя.
Применение способа согласно данному изобретению и соответственно тормозного устройства, действующего согласно этому способу, позволяет снижать скорость эскалатора или движущейся пешеходной дорожки определенным образом до значения 0 м/сек с равномерным, по существу, замедлением. В момент срабатывания, например, защитного элемента осуществляют линейно изменяющееся торможение, и тем самым обеспечивается возможность равномерного торможения с линейным замедлением, при этом выдерживается тормозной путь, определяемый соответствующими значениями регулирования. Регулятор содержит значения замедления в качестве заданных значений, которые предпочтительно периодически сравнивают со значениями скорости приводного двигателя эскалатора или движущейся пешеходной дорожки.
Согласно еще одному варианту реализации данного изобретения тормозной электромагнит выполнен с возможностью управления им независимо от электропитания приводного двигателя. Для этого требуется несколько большие затраты, поскольку необходимо обеспечивать независимое электропитание, но в некоторых случаях, в частности, с точки зрения техники безопасности, этот метод применения считается вариантом рационального усовершенствования объекта данного изобретения.
Объект данного изобретения применим для всех видов тормозов, используемых с эскалаторами и движущимися пешеходными дорожками. Но его предпочтительно применять с колодочными тормозами, оборудованными подпружиненными тормозными рычагами.
Объект данного изобретения представлен на чертежах в качестве примера осуществления, излагаемого ниже.
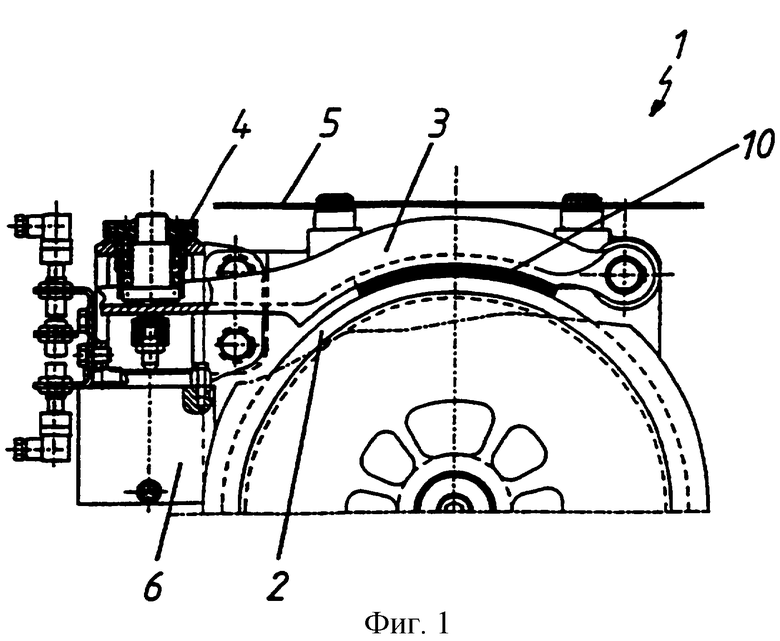
Фиг.1 изображает тормозное устройство в частичном разрезе, например эскалатора;
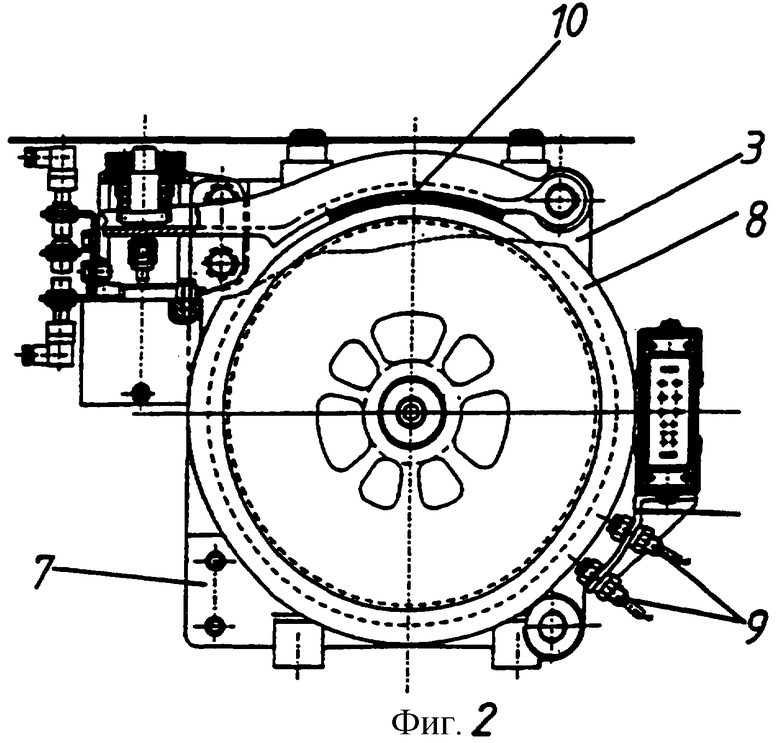
фиг.2 - тормозное устройство согласно фиг.1, выполненное с возможностью определения значения фактической скорости;
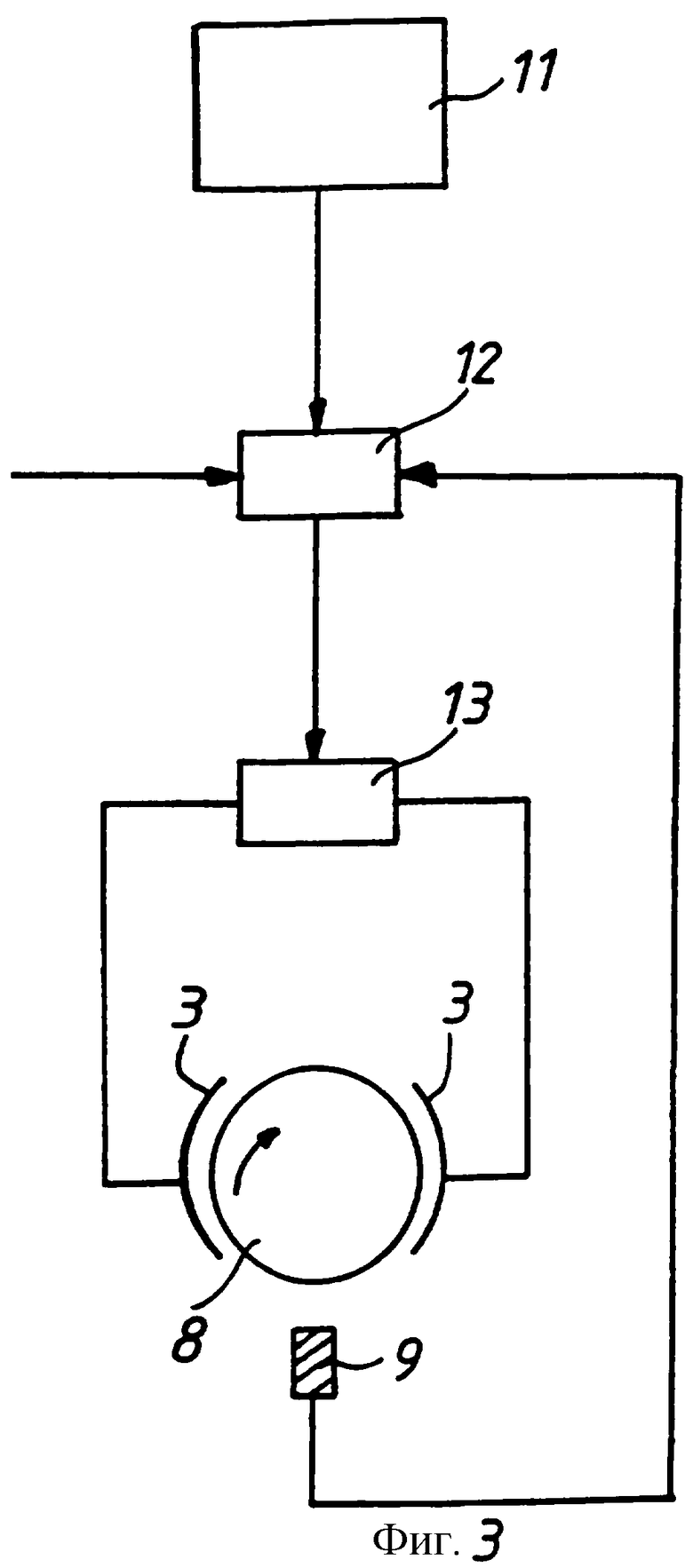
фиг.3 - функциональную схему способа согласно данному изобретению для регулирования тормозного устройства по фиг.1 и 2.
Фиг.1 изображает тормоз 1 эскалатора в частичном разрезе (сам эскалатор не изображен). Представлены тормозной барабан 2, тормозной рычаг 3, комплект пружин 4, фиксирующее устройство 5 и тормозной электромагнит 6, который в этом примере приводят в действие постоянным током.
Фиг.2 изображает те же упоминаемые выше элементы, а также кожух 7 приводного двигателя 8, датчики 9 (например, пусковые элементы бесконтактного переключателя) для определения скорости приводного двигателя 8.
Повышение скорости и недостаточную скорость приводного двигателя 8 детектируют датчиками и подают их показания в защитное устройство двигателя (не изображено). В обычном состоянии эскалатора находящийся на тормозном рычаге 3 колодочный тормоз 10 находится в свободном положении, т.е. он не упирается в тормозной барабан. При выключении привода пружину 4 прижимает тормозной рычаг 3 к тормозному барабану, сформированному на приводном двигателе 8, и таким образом создает тормозящий момент. При этом тормозной рычаг 3 нажимает на тормозной барабан и останавливает ленту ступенек.
Эти тормозные устройства механического действия являются известным уровнем техники, но также можно использовать любой другой вид тормоза, не являющегося тормозом механического типа.
Фиг.3 изображает принципиальную схему управления тормозного устройства 1 согласно фиг.1 и 2. Позиция 11 указывает источник электропитания. Позицией 12 обозначен регулятор, и позицией 13 - тормозной электромагнит. Также указаны электродвигатель 8, тормозной рычаг 3 и датчики 9 скорости. Несколько заранее определенных теоретических значений возможного линейно изменяющегося замедления предпочтительно запоминают в регуляторе 12. В этом примере датчики 9 скорости периодически определяют соответствующую скорость приводного двигателя 8 и ее значение в качестве фактического значения подают в регулятор 12. Регулятор 12 периодически сравнивает теоретические и фактические значения и результаты этого сравнения передает в тормозной электромагнит 13 в виде установок; поэтому он, в свою очередь, может воздействовать на тормозной рычаг 3 для осуществления регулирования.
Как только действие привода эскалатора прекращается, тормозной рычаг 3, согласно фиг.1 и 2, сразу приводится в действие посредством тормозного электромагнита 6, в который электропитание более не поступает и поэтому будет преобладать усилие пружины 4. Эта незамедлительная остановка может вызвать проблемы в связи с рывками замедления ленты ступенек эскалатора, что в определенных обстоятельствах может обусловить риск травмы, если не будут приняты должные меры.
За счет регулирования путем сравнения теоретических и фактических значений действие тормоза теперь контролируется путем управления тормозным электромагнитом 13 определенным образом и в случае отключения электроэнергии поэтому обеспечивается возможность, по существу, линейного торможения согласно заданным критериям (линейно изменяющееся торможение).
Также обеспечивается возможность запоминания теоретических значений (S) в регуляторе в полях теоретических значений или зонах теоретических значений в виде линейно изменяющегося торможения с обеспечением так называемой схемы нечеткой логики, согласно которой регулятор 12 определяет оптимальное возможное регулирование тормоза или линейно изменяющегося торможения в зависимости от предоставляемых фактических значений (I).
Изобретение относится к способам управления тормозами эскалаторов или движущихся пешеходных дорожек. Способ согласно изобретению заключается в том, что в зоны или области памяти для заданных значений регулятора записывают в качестве заданных значений временные значения замедления. С помощью регулятора производят периодическое сравнение заданного и фактического значений и на основе такого сравнения управляют тормозом или тормозами независимо от нагрузки посредством воздействия тормозного электромагнита на тормоз таким образом, что обеспечивают заданное линейное тормозное замедление. При этом в регулятор периодически или постоянно подают фактические значения скорости привода или приводов, определяемые датчиками скорости. Изобретение обеспечивает повышение производительности. 2 з.п. ф-лы, 3 ил.
| DE 2003951, 05.08.1971 | |||
| US 4664247 А, 12.05.1987 | |||
| JP 07125963 А, 16.05.1995 | |||
| RU 94033347 А1, 27.07.1996. |

