Область техники, к которой относится изобретение
Изобретение относится к транспортной технике, а именно к пассажирским конвейерам. Они являются эффективным средством для перевозки людей, например, между разными уровнями внутри зданий или по пешеходным дорожкам.
Уровень техники
Обычно, конструкция пассажирских конвейеров включает большое число ступеней или ленточный транспортер, на которые становятся люди для их транспортировки из одного места в другое. По балюстраде движется поручень, образующий поверхность, за которую может держаться человек, перемещающийся на конвейере. Как правило, поручень представляет собой в целом плоскую поверхность, расположенную параллельно направлению движения конвейера.
Движение поручней происходит согласованно с движением ступеней или ленточного транспортера. Требуемое движение поручня обеспечивается механизмом привода поручня. В типовой конструкции двигатель, приводящий в движение лестничное полотно (цепь ступеней), соединен с системой привода поручня. Один и тот же двигатель приводит в движение лестничное полотно и поручень, обеспечивая тем самым согласованность их движения. Хотя такая конфигурация и подтвердила свою эффективность, специалисты стремятся к более совершенным решениям. Пример усовершенствования приведен в опубликованной патентной заявке США 2006/0070846.
Например, было бы желательно упростить процедуры установки и обслуживания пассажирских конвейеров. Объединение систем привода лестничного полотна и поручня способствует усложнению и увеличению продолжительности этих работ. Поскольку система привода поручня требует проведения работ по ее обслуживанию и ремонту, желательно создать усовершенствованную конструкцию для сведения к минимуму времени простоя конвейера.
Раскрытие изобретения
Для достижения указанного технического результата разработан пассажирский конвейер, содержащий подвижный рабочий настил, первый привод, установленный с возможностью перемещения рабочего настила, поручень, второй привод, установленный с возможностью перемещения поручня и включающий двигатель только для перемещения поручня, контроллер, установленный с возможностью управления вторым приводом независимо от первого привода при перемещении рабочего настила или поручня соответственно при неподвижном поручне или рабочем настиле. Контроллер может быть установлен с возможностью управления вторым приводом для остановки поручня при определенных условиях, соответствующих продолжению движения рабочего настила в течение определенного промежутка времени после остановки поручня. Указанные определенные условия могут включать условие незагруженного пассажирами рабочего настила. Рабочий настил может находиться в движущемся состоянии при наличии определенных условий. Указанный конвейер может содержать датчик, установленный с возможностью подачи сигнала наличия по меньшей мере одного пассажира по меньшей мере в окрестности рабочего настила, при этом контроллер установлен с возможностью получения указанного сигнала. Указанный конвейер может содержать коммутационный механизм, при этом определенные условия включают запуск коммутационного механизма, оповещающего о необходимости остановки по меньшей мере либо рабочего настила или поручня. Указанный конвейер может иметь поручень, который выполнен с возможностью более ранней остановки, чем рабочий настил. Коммутационный механизм может содержать аварийный выключатель вблизи входного отверстия поручня. Контроллер может быть установлен с возможностью управления вторым приводом и первым приводом для останова совместно откликом по отношению к запуску коммутационного механизма и более ранней остановки поручня, чем рабочего настила. Контроллер может быть установлен с возможностью управления вторым приводом, при этом поручень переведен в состояние останова при перемещении рабочего настила в состоянии незагруженности пассажирами или поручень переведен в состояние останова до момента останова рабочего настила при запуске коммутационного механизма, оповещающего о необходимости остановки по меньшей мере поручня или рабочего настила. В конвейере поручень может иметь входное отверстие в точке входа поручня в другую часть конвейера, при этом запуск коммутационного механизма является оповещением попадания постороннего объекта во входное отверстие поручня.
Для достижения указанного технического результата разработан способ управления работой пассажирского конвейера, включающий подвижный рабочий настил и поручень, в котором независимо управляют движением поручня и рабочего настила для обеспечения движения рабочего настила или поручня при соответственно неподвижном поручне или рабочем настиле, при этом перемещают поручень двигателем, установленным только для перемещения поручня. В способе можно останавливать поручень при возникновении определенных условий, при которых рабочий настил продолжает движение по меньшей мере определенный промежуток времени после остановки поручня. В способе определенные условия могут включать условие незагруженного пассажирами рабочего настила. В способе можно продолжать движение рабочего настила при наличии определенных условий. В способе можно определять наличие по меньшей мере одного пассажира по меньшей мере в окрестности рабочего настила. В способе определенные условия могут включать запуск коммутационного механизма, оповещающего о необходимости остановки по меньшей мере либо рабочего настила или поручня. В способе можно останавливать поручень раньше останова рабочего настила. Используемый в способе коммутационный механизм может содержать аварийный выключатель вблизи входного отверстия поручня. В способе можно одновременно выдавать команду на остановку поручня и рабочего настила, при этом поручень останавливают раньше рабочего настила.
Суммируем вышесказанное. Используемый в качестве примера изобретения агрегат пассажирского конвейера включает движущийся рабочий настил. Первый привод используется для перемещения рабочего настила в нужном направлении. Агрегат также включает поручень и второй привод, используемый для приведения в движение поручня. Устройство управления управляет вторым приводом независимо от первого привода для обеспечения возможности движения какой-то одной части конвейера - рабочего настила или поручня, при неподвижной другой части, соответственно, поручня или рабочего настила. Используемый в качестве примера способ управления работой пассажирского конвейера включает независимое управление движением поручня и рабочего настила для обеспечения возможности движения какой-то одной части конвейера - рабочего настила или поручня, при неподвижной другой части, соответственно, поручня или рабочего настила.
Различные признаки и преимущества раскрытых примеров будут очевидны специалистам при ознакомлении с приведенным далее подробным описанием. Ниже приводится краткое описание приложенных чертежей.
Краткое описание чертежей
На Фиг.1 схематически показаны отдельные части используемого в качестве примера пассажирского конвейера, включающего приводное устройство поручней, конструкция которого соответствует варианту выполнения настоящего изобретения.
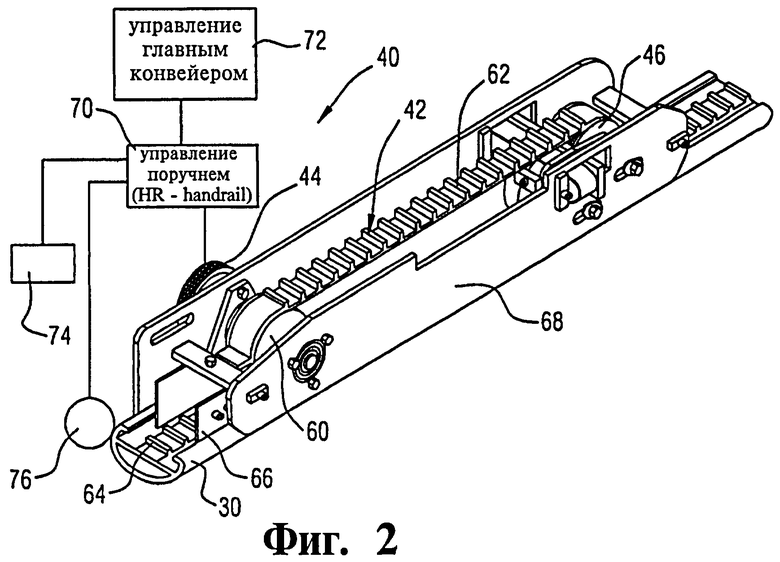
На Фиг.2 схематически показано использованное в качестве примера приводное устройство.
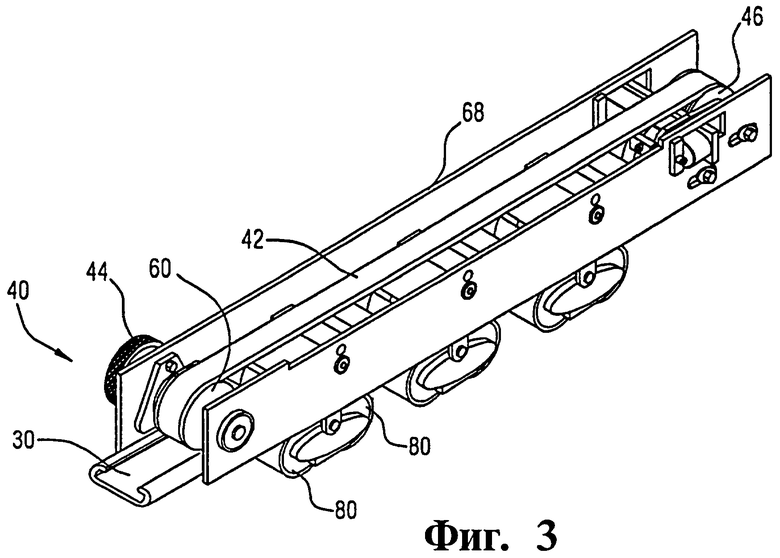
На Фиг.3 схематически показаны отдельные части другого примера выполнения приводного устройства.
Осуществление изобретения
На Фиг.1 схематически изображен пассажирский конвейер 20. В данном примере, пассажирский конвейер представляет собой эскалатор, имеющий совокупность ступеней 22 для перевозки пассажиров между площадками 24 и 26 на разных уровнях внутри здания. Совокупность ступеней 22 представляет один из типов движущегося рабочего настила. Изобретение не ограничено эскалаторами, и может быть использовано для пассажирских конвейеров других типов, например, движущихся дорожек. В других конвейерах могут использоваться другие рабочие настилы, например, накладки или ремни. В качестве примера для рассмотрения будут использованы ступени 22.
Использованный в качестве примера пассажирский конвейер, показанный на Фиг.1, включает поручень 30, вместе со ступенями 22. Приводное устройство 40 поручня включает приводной элемент 42, находящийся в зацеплении с приводом 30 для перемещения привода 30 в нужном направлении. Использованное в качестве примера приводное устройство 40 поручня включает двигатель 44, предназначенный для приведения в движение поручня 30. Двигатель 44 соединен с роликом с одной стороны петли, по которому проходит приводной элемент, в данном примере содержащий ремень. Другой ролик 46 расположен с противоположной стороны петли. Двигатель 44 заставляет приводной элемент двигаться вокруг по петле, которая приводит в движение поручень 30 нужным образом, благодаря сцеплению между поручнем 30 и приводным элементом 42.
Приводное устройство 40 поручня и узел 50 привода, используемый для движения ступеней 22 посредством приведения в движение лестничного полотна эскалатора (не показано), являются отдельными приводами. Двигатель 44 и двигатель узла 50 привода являются отдельными двигателями. Соответственно, приведенная в качестве примера система отличается от традиционных пассажирских конвейерных систем, в которых поручень приводится в движение тем же двигателем, что и лестничное полотно. В другом примере, свойства отдельного управления достигаются в схеме с общим двигателем для ступеней и поручня, но с использованием отдельно управляемого механизма, по типу сцепления, для соединения привода поручня с двигателем.
На Фиг.2 схематически представлен пример приводного устройства 40 поручня. В этом примере, двигатель 44 включает двигатель с постоянным магнитом. Одним признаком использования двигателя с постоянным магнитом является возможность получения относительно высоких крутящих моментов, необходимых для приведения в движение поручня, от двигателя небольшого размера. Другим признаком двигателя с постоянным магнитом является возможность точного управления скоростью, с которой двигатель 44 вращает приводной элемент 42. Могут быть также использованы двигатели других типов, например, обычные асинхронные двигатели.
Приводной элемент 42 в приведенном примере включает зубчатый ремень, обходящей по петле вокруг ролика 46 и ролика 60, который может считаться приводным шкивом, поскольку он приводится во вращение двигателем 44. Приводной элемент 42 с зубчатым ремнем имеет зубья 62, форма которых обеспечивает сцепление с зубьями 64 соответствующей формы на поручне 30. Направляющая опора 66 поддерживает соответствующие части поручня 30 в положении, обеспечивающем требуемое сцепление между зубьями 62 и 64. При вращении двигателем 44 ролика 60 происходит перемещение приводного элемента 42, вызывающее нужное движение поручня 30. Крепежная конструкция 68 обеспечивает установку устройства 40 в нужном положении на раме конвейера или ином основании.
В использованном для иллюстрации примере имеется контроллер 70 привода поручня, который управляет работой двигателя 44, обеспечивая необходимое движение поручня с нужной скоростью, согласованной с движением ступеней 22. Контроллер 70 привода поручня связан с контроллером 72 главного конвейера, который управляет узлом 50 привода. Контроллер 72 главного конвейера выдает на контроллер 70 привода поручня информацию, относящуюся к скорости и направлению движения ступеней 22 с тем, чтобы контроллер 70 привода поручня мог управлять двигателем 44 для обеспечения соответствующих параметров движения поручня.
В одном из примеров, связь между контроллером 72 главного конвейера и контроллером 70 привода поручня выполняет функцию источника питания для приводного устройства 40 поручня. Например, в тех случаях, когда контроллер 72 главного конвейера определяет, что конвейер остановился или отключен, он управляет подачей питания на приводное устройство поручня в соответствии с заданными критериями.
Использованный для примера контроллер 70 привода поручня также получает информацию от датчика 74 лестничного полотна, который показывает скорость движения лестничного полотна и ступеней 22. В одном примере, используется по крайней мере один датчик положения, приспособленный для определения движения штифтов, связанных с валиками ступеней или лестничного полотна, для получения данных о скорости движения. Датчик 76 скорости поручня показывает фактическую скорость движения поручня. Используя приведенное описание, специалист сможет выбрать из имеющихся на рынке датчиков то, что необходимо для создания системы, соответствующей заданным требованиям. Контроллер 70 привода поручня использует эту информацию от датчиков и известные рабочие характеристики двигателя 44 для управления работой двигателя 44 так, чтобы скорость движения поручня 30 соответствовала текущей скорости движения ступеней. В одном примере, контроллер 70 привода поручня содержит регулятор с переменной частотой, который обеспечивает необходимое управление скоростью вращения двигателя 44.
В приведенной иллюстрации, контроллер 70 привода поручня и контроллер 72 главного конвейера в целях рассмотрения схематически показаны раздельно. В одном примере, каждый из них представляет отдельное управляющее устройство. В другом примере, функции контроллера 70 привода поручня и контроллера 72 главного конвейера выполняются единым контроллером.
В некоторых примерах, для каждого поручня используются отдельные двигатели 44 и приводные устройства 40 поручня (например, для одного справа и одного слева от рабочего настила). В таком варианте выполнения, возможно независимо управлять каждым поручнем (например, раздельным управлением двигателей 44 с каждой стороны), а в другом примере, один двигатель 44 создает силу, необходимую для приведения в движение приводных устройств 40, связанных с поручнями с каждой стороны конвейера. Возможность управления приводным устройством 40 поручня независимо от узла 50 привода дает дополнительные свойства, которые невозможны в системе, в которой поручень приводится в движение непосредственно оттого же привода, что и ступени. Использованный для примера контроллер 70 привода поручня управляет приводом 40 поручня независимо от узла 50 привода ступеней, благодаря чему возможно движение какой-то одной части конвейера - совокупности ступеней 22 или поручня 30, при неподвижной другой, соответственно, поручня 30 или совокупности ступеней 22. Контроллер 70 привода поручня в одном примере управляет приводом 40 поручня, останавливая поручень 30 при заданных условиях, при которых совокупность ступеней 22 продолжает движение по крайней мере некоторое время после остановки поручня 30.
В одном примере, контроллер 70 привода поручня дает команду приводу 40 поручня остановить движение поручня 30 в случае, если пассажирский конвейер 20 не загружен, и ступени 22 не перевозят пассажиров. Как показано на Фиг.1, по крайней мере один датчик 80 связан с агрегатом конвейера 20, для обнаружения по крайней мере одного пассажира в окрестности ступеней 22, или по крайней мере на одной из ступеней 22. В использованном для иллюстрации примере, оптические датчики 80 установлены вблизи каждой площадки 24 и 26 для обнаружения присутствия по крайней мере одного пассажира на площадке или в пространстве, в пределах которого пассажир может находиться на ступенях 22. В одном примере, используются известные оптические датчики, позволяющие обнаружить, когда мимо датчика проходит человек.
Когда пассажирский конвейер 20 не загружен и пассажиры отсутствуют, контроллер 70 привода поручня останавливает привод 40 поручня с тем, чтобы поручень 30 не двигался. В то же время, под управлением контроллера 72 главного конвейера узел 50 привода продолжает перемещать ступени 22. Учитывая, что на движение поручней расходуется значительная часть энергии, потребляемой многими пассажирскими конвейерными системами, возможность отдельного управления движением поручней в условиях отсутствия нагрузки обеспечивает значительную экономию энергии, благодаря остановке поручня 30 при сохранении движения совокупности ступеней 22.
Одним из признаков в данном примере является то, что движущиеся ступени или накладки дают приближающемуся пассажиру визуальный сигнал, что конвейер работает, в то время как визуальный сигнал неподвижных поручней, имеющих обычно равномерную окраску, не будет заметен для пассажира.
Другим признаком является преимущество в обслуживании и увеличение срока службы привода поручня, поскольку он не работает постоянно. Кроме того, при ремонте или испытаниях, приводы поручня могут проверяться отдельно, без включения всей системы эскалатора.
В одном примере, при обнаружении пассажира, приближающегося к площадке или находящегося на ней, или по крайней мере на одной из ступеней 22, контроллер 70 привода поручня дает команду на включение привода 40 для ускорения поручня 30 до скорости, когда поручень движется согласованно с совокупностью ступеней 22.
Другой ситуацией, при которой желательно остановить поручень 30, даже если ступени 22 продолжают движение, является активизация коммутатора, указывающая на необходимость остановить движение агрегата конвейера 20. Как показано на Фиг.1, коммутатор 82 связан со входным отверстием 84 поручня. Коммутатор 82 работает известным образом, показывая, что во входное отверстие 84 поручня попал объект, в результате чего объект может застрять, например, между конструкцией балюстрады пассажирского конвейера и поручнем 30. Обычно, активизация таких коммутаторов приводит к отключению конвейера с тем, чтобы избежать захвата такого объекта в подобных условиях. В приведенном примере, контроллер 70 привода поручня дает команду приводу 40 поручня на остановку поручня 30 сразу же после активизации коммутатора 82. Это обеспечивает остановку поручня 30 до того, как могут быть остановлены ступени 22.
Даже если контроллер 72 главного конвейера дает управляющую команду узлу 50 привода на остановку движения ступеней 22 немедленно после активизации коммутатора 82, остановить ступени 22 столь же быстро, как поручни 30, невозможно. Ступени 22 должны продолжать движение даже после выдачи команды на остановку с тем, чтобы избежать быстрого замедления, которое может привести к падению пассажира на одной из ступеней. Кроме того, вес цепи ступеней усложняет полную остановку сразу же после активизации коммутатора 82. Остановка же движения поручня 30 до того, как будет можно полностью остановить ступени, вполне возможна, и повышает шансы предотвращения захвата объекта на входном отверстии 84 поручня, даже если ступени 22 продолжают движение некоторое время после активизации коммутатора 82. В отсутствие независимого управления движением поручней, поручень 30 продолжал бы двигаться вместе со ступенями 22, пройдя расстояние, в некоторых случаях составляющее по крайней мере 250 мм. В представленном примере поручень 30 может остановиться практически сразу же после активизации коммутатора 82, даже если ступени продолжают движение. Другими словами, поручень 30 останавливается до того, как останавливаются ступени 22.
Используя настоящее описание, специалисты смогут запрограммировать контроллер в соответствии с требованиями применения в конкретной установке.
На Фиг.3 представлен другой пример приводного устройства поручня.
В этом примере, конструкции приводного элемента 42 и поручня 30 отличаются от показанных на Фиг.2. В этом примере, используется более распространенная плоская конфигурация приводного ремня и поручня. Приводной элемент 42 с плоским ремнем в этой конфигурации использует фрикционное сцепление с поручнем 30. Ролики 80 захватывают одну сторону поручня, обеспечивая требуемое тяговое сцепление между поручнем 30 и приводным элементом 42. В остальном, конструкция, показанная на Фиг.3, работает так же, как и в примере на Фиг.2
В другом примере (не показан), вместо приводного элемента 42 с плоским ремнем, используются обычные ролики привода поручня.
Одним признаком раскрытых примеров является то, что приводное устройство 40 поручня может быть расположено в любом месте в системе пассажирского конвейера, что представляет удобство при монтаже системы, при условии, что конструкция 68 может быть закреплена так, чтобы обеспечивалось надлежащее сцепление между приводным элементом 42 и поручнем 30. Это не только упрощает монтаж конвейера, но и предоставляет преимущества для обслуживания или ремонта, поскольку приводное устройство поручней может быть расположено более удобно. Когда приводное устройство поручня расположено отдельно от узла привода лестничного полотна, каждый привод может обслуживаться без помех со стороны другого привода.
Другой признак состоит в том, что приводное устройство 40 поручня может быть установлено в существующий агрегат конвейера при его модернизации. Связь между приводом лестничного полотна и приводом поручня может быть разорвана, либо иным образом заблокирована, и вместо него может быть установлено приводное устройство 40 поручня. Этим обеспечивается, например, более широкий выбор заменяемых поручней, поскольку поручни различных конфигураций будут обеспечены подходящими для них приводными устройствами 40 поручня. Например, можно будет установить поручень с жестким приводом (зубчатый привод) вместо поручня с фрикционным приводом, посредством установки приводного устройства 40 поручня, показанного на Фиг.2. Подобная замена невозможна в обычной системе, конфигурация которой предусматривает поручни только одного типа. Другим признаком раскрытых примеров является то, что работа поручня происходит более равномерно по сравнению с системой, где поручень приводится в движение тем же двигателем, что и лестничное полотно. Специальный двигатель в устройствах, использованных в качестве примера, обеспечивает более плавную передачу движущей силы к поручню, и позволяет избежать вибраций, связанных с движениями лестничного полотна.
Кроме того, в некоторых примерах, разделение двигателя привода поручней и двигателя привода лестничного полотна упрощает каждый из приводных механизмов, поскольку позволяет решать одну задачу вместо двух, снижает износ, упрощает обслуживание и снижает вероятность необходимого ремонта.
Приведенное описание является иллюстративным, и не ограничивает изобретения. Для специалистов должны быть очевидными изменения и модификации в раскрытых примерах, которые не обязательно будут отступать от существа изобретения. Область правовой защиты, предоставляемой настоящему изобретению, может быть определена только при изучении следующей далее формулы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ИНДИКАЦИИ НАПРАВЛЕНИЯ ДВИЖЕНИЯ ПАССАЖИРСКОГО КОНВЕЙЕРА И ПАССАЖИРСКИЙ КОНВЕЙЕР | 2003 |
|
RU2428369C2 |
| Конвейер лестничный пассажирский | 1973 |
|
SU597600A1 |
| ЭСКАЛАТОР | 2012 |
|
RU2508242C2 |
| Конвейер лестничный пассажирский | 1960 |
|
SU139238A1 |
| ОБНАРУЖЕНИЕ ЛЮДЕЙ ОТНОСИТЕЛЬНО ПАССАЖИРСКОГО ТРАНСПОРТЕРА С ПОМОЩЬЮ ЕМКОСТНОГО ДАТЧИКА | 2009 |
|
RU2533653C2 |
| ПАССАЖИРСКИЙ МИНИ-ЛИФТ | 1992 |
|
RU2081047C1 |
| Пассажирский конвейер переменной скорости | 1977 |
|
SU737339A1 |
| ПАССАЖИРСКИЙ КОНВЕЙЕР | 2020 |
|
RU2788243C1 |
| ТОРМОЗНОЕ УСТРОЙСТВО ПАССАЖИРСКОГО КОНВЕЙЕРА И ПАССАЖИРСКИЙ КОНВЕЙЕР | 2007 |
|
RU2461748C2 |
| СПОСОБ ОРГАНИЗАЦИИ ДВИЖЕНИЯ ТРАНСПОРТА | 2015 |
|
RU2603046C1 |
Группа изобретений относится к транспортной технике, а именно к пассажирским конвейерам. Пассажирский конвейер содержит подвижный рабочий настил, первый привод перемещения рабочего настила, поручень, второй привод перемещения поручня и контроллер управления вторым приводом независимо от первого привода при перемещении рабочего настила или поручня при соответственно неподвижном поручне или рабочем настиле. Второй привод содержит двигатель только для перемещения поручня. Способ управления работой указанного пассажирского конвейера. Достигается снижение износа, упрощение конструкции конвейера и снижение времени простоя конвейера при проведении работ по обслуживанию и ремонту. 2 н. и 18 з.п. ф-лы, 3 ил.
1. Пассажирский конвейер, включающий подвижный рабочий настил, первый привод перемещения рабочего настила, поручень, второй привод перемещения поручня, содержащий двигатель только для перемещения поручня, и контроллер управления вторым приводом независимо от первого привода при перемещении рабочего настила или поручня при соответственно неподвижном поручне или рабочем настиле.
2. Конвейер по п.1, в котором контроллер связан со вторым приводом с возможностью остановки поручня при определенных условиях, соответствующих продолжению движения рабочего настила в течение определенного промежутка времени после остановки поручня.
3. Конвейер по п.2, в котором указанные определенные условия включают в себя условие незагруженного пассажирами рабочего настила.
4. Конвейер по п.3, в котором рабочий настил установлен с возможностью перемещения в течение определенного промежутка времени при определенных условиях, соответствующих остановке поручня.
5. Конвейер по п.3, который дополнительно содержит датчик подачи сигнала наличия по меньшей мере одного пассажира по меньшей мере в зоне рабочего настила, связанный с контроллером с возможностью получения им указанного сигнала.
6. Конвейер по п.2, который дополнительно содержит коммутатор, выполненный с возможностью оповещения о необходимости остановки при определенных условиях, соответствующих остановке поручня.
7. Конвейер по п.6, в котором поручень выполнен с возможностью более ранней остановки, чем рабочий настил.
8. Конвейер по п.6, в котором коммутатор содержит аварийный выключатель, установленный в зоне входного отверстия поручня.
9. Конвейер по п.8, в котором контроллер связан со вторым приводом и первым приводом с возможностью одновременного останова в ответ на запуск коммутатора и более ранней остановки поручня, чем рабочего настила.
10. Конвейер по п.1, в котором контроллер связан со вторым приводом с возможностью останова поручня при перемещении рабочего настила в состоянии незагруженности пассажирами или до момента останова рабочего настила при запуске коммутатора с оповещением необходимости остановки по меньшей мере поручня или рабочего настила.
11. Конвейер по п.10, который имеет основание с входными отверстиями, при этом поручень установлен во входных отверстиях, а коммутатор установлен в зоне входного отверстия и выполнен с возможностью оповещения о попадании постороннего объекта во входное отверстие.
12. Способ управления работой пассажирского конвейера, содержащий подвижный рабочий настил и поручень, характеризующийся независимым управлением движением поручня и рабочего настила при соответственно неподвижном рабочем настиле или поручне, при этом перемещают поручень двигателем, который устанавливают только для перемещения поручня.
13. Способ по п.12, в котором останавливают поручень при возникновении определенных условий, при которых рабочий настил продолжает движение по меньшей мере определенный промежуток времени после остановки поручня.
14. Способ по п.13, в котором определенные условия включают условие незагруженного пассажирами рабочего настила.
15. Способ по п.14, в котором продолжают движение рабочего настила в течение определенного промежутка времени при определенных условиях, соответствующих остановке поручня.
16. Способ по п.14, в котором определяют наличие по меньшей мере одного пассажира по меньшей мере в зоне рабочего настила.
17. Способ по п.13, в котором дополнительно используют коммутатор, посредством которого оповещают о необходимости остановки при определенных условиях, соответствующих остановке поручня.
18. Способ по п.17, в котором останавливают поручень раньше останова рабочего настила.
19. Способ по п.17, в котором в коммутатор включают аварийный выключатель, который располагают в зоне входного отверстия поручня.
20. Способ по п.19, в котором одновременно выдают команду на остановку поручня и рабочего настила, при этом поручень останавливают раньше рабочего настила.
| JP 2000053353 А, 22.02.2000 | |||
| DE 19539796 A1, 30.04.1997 | |||
| JP 2005132544 A, 26.05.2005 | |||
| US 5295567 A, 22.03.1994. |

