Изобретение относится к транспортному машиностроению, а именно, к подвеске транспортных средств.
Аналогом служит крыльчатый амортизатор [1], имеющий корпус, две гидравлические полости, заполненные рабочей жидкостью, и одну газовую полость, а также клапаны с упругими элементами и крыльчатку с плоскими крыльями (лопастями), выполненную за одно целое с валом, обладающим возможностью поворачиваться.
Аналогу присущи следующие недостатки:
- малая энергоемкость амортизатора (он содержит гидравлическую полость, не участвующую в энергопреобразовании, а часть рабочей гидравлической полости занята размещенными в ней упорами),
- диссипация внутренней энергии рабочей жидкости;
- недостаточная стабильность характеристики сопротивлений амортизатора из-за снижения жесткости упругих клапанных элементов в процессе эксплуатации.
Прототипом заявляемого изобретения является однотрубный газонаполненнный амортизатор [2], содержащий цилиндр, шток, неподвижно смонтированный на нем поршень, направляющую втулку, гидравлическую полость цилиндра, поделенную поршнем на верхнюю и нижнюю части, а также газовую полость и разделитель, отделяющий ее от гидравлической полости.
По сравнению с аналогом [1] прототип [2] обладает более высокой энергоемкостью, однако и в нем внутренняя энергия рабочей жидкости не используется. Кроме того, применение в прототипе упругих клапанных элементов не позволяет решить вопрос стабилизации характеристики сопротивлений амортизатора.
Технической задачей изобретения являются полезное использование энергии колебаний транспортного средства и исключение упругих клапанных элементов.
Техническая задача решается тем, что однотрубный газонаполненный амортизатор, содержащий цилиндр и поршень, имеет верхнюю и нижнюю катушки индуктивного датчика перемещения поршня, выполненного с магнитным полем, гидравлическую полость цилиндра, поделенную поршнем на верхнюю и нижнюю части, соединенные с гидравлической полостью преобразователя энергии, который включает в себя крыльчатку, установленную на валике и состоящую из бандажного кольца и поворотных лопастей, размещенных между ним и пояском валика, связанную через дифференциал, червячный и двухрядный планетарный механизмы с шаговым электродвигателем, обеспечивающим посредством управляющего устройства, соединенного с верхней и нижней катушками, изменение проходного сечения каналов крыльчатки.
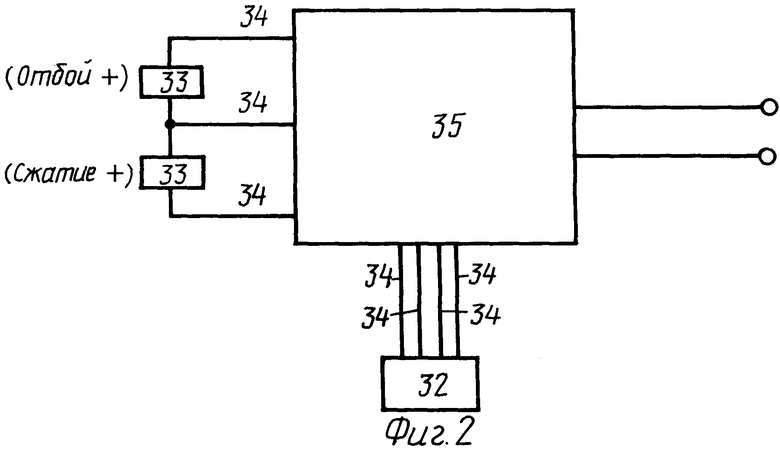
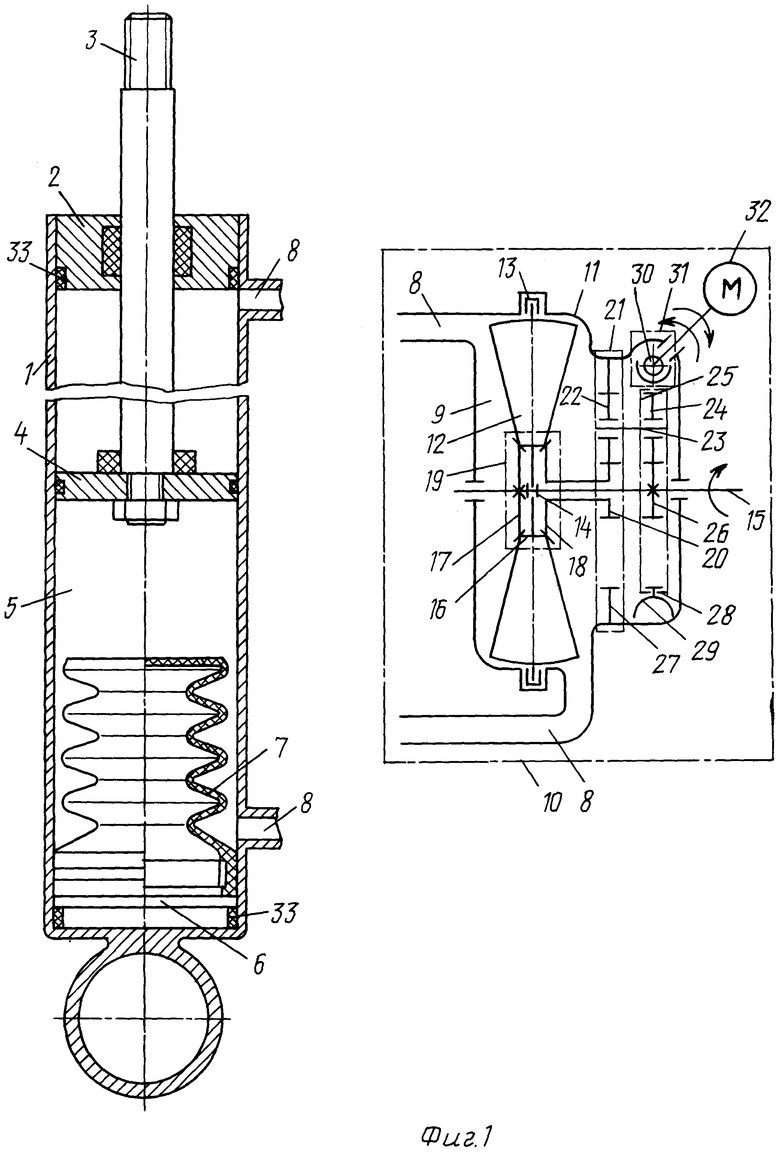
На фиг.1 изображен общий вид крыльчатого амортизатора, а на фиг.2 - его структурная электрическая схема.
Крыльчатый амортизатор содержит цилиндр 1 (фиг.1), направляющую втулку 2, шток 3, неподвижно смонтированный на нем поршень 4 с магнитным полем, гидравлическую полость 5 цилиндра 1, поделенную поршнем 4 на верхнюю и нижнюю части, а также газовую полость 6 и разделитель 7, изолирующий ее от гидравлической полости 5. Обе части последней соединены каналами 8 с гидравлической полостью 9 преобразователя 10 энергии. В его корпусе 11 расположена крыльчатка с поворотными лопастями 12. Их наружные и внутренние оси размещены в гнездах соответственно бандажного кольца 13 и пояска 14 на валике 15. На внутренних концах лопастей 12 выполнены конические шестерни 16. Они находятся в постоянном зацеплении с шестерней 17, неподвижно смонтированной на валике 15, и с шестерней 18, установленной на валике 15 с возможностью поворота на нем. Шестерни 16, 17 и 18 образуют дифференциал 19.
Шестерня 18 дифференциала 19 выполнена за одно целое с солнечной шестерней 20 первого планетарного ряда 21. Каждый сателлит 22 первого планетарного ряда 21 сидит на одной оси 23 с сателлитом 24 второго планетарного ряда 25, оба - с возможностью вращаться вокруг нее. Солнечная шестерня 26 второго планетарного ряда 25 посажена на валике 15 неподвижно. Эпициклическая шестерня 27 первого планетарного ряда 21 неподвижна, а эпициклическая шестерня 28 второго планетарного ряда 25 имеет возможность поворачиваться вокруг оси. На наружной цилиндрической поверхности шестерни 28 нарезаны червячные зубья 29, находящиеся в зацеплении с червяком 30. Вместе с червячными зубьями 29 шестерни 28 он образует червячный механизм 31. Червяк 30 жестко соединен с ротором шагового электродвигателя 32.
В цилиндре 1 размещены верхняя и нижняя катушки 33 индуктивного датчика перемещения поршня 4. Проводами 34 (фиг.2) обе катушки 33 соединены с управляющим устройством 35, а оно - с шаговым электродвигателем 32.
Поворотные лопасти 12 крыльчатки (фиг.1), дифференциал 19, первый 21 и второй 25 ряды планетарного механизма, червячный механизм 31, а также шаговый электродвигатель 31, управляющее устройство 34 (фиг.2) и две катушки 33 индуктивного датчика перемещения поршня 4 (фиг.1) с магнитным полем обеспечивают реализацию требуемой характеристики сопротивлений амортизатора при постоянном направлении вращения выходного валика 15 преобразователя 10 энергии. Неизменность направления вращения валика 15 создает более широкие возможности использования внутренней энергии рабочей жидкости амортизатора для привода различных механизмов.
Амортизатор работает следующим образом.
Когда давления в обеих частях гидравлической полости 5 (фиг.1) равны, лопасти 12 находятся в исходном положении, а именно, в плоскости вращения их осей. Пропускная способность крыльчатки с таким положением лопастей минимальная.
При сжатии поршень 4 начинает перемещаться вниз, в результате чего рабочая жидкость перетекает из нижней части гидравлической полости 5 цилиндра в верхнюю часть по каналам 8 через гидравлическую полость 9 преобразователя 10 энергии.
За счет движущегося магнитного поля поршня 4 на нижней катушке 33 индуктивного датчика его перемещения создается положительный потенциал. Знак последнего служит управляющему устройству 35 (фиг.2) основанием для выработки воздействия по изменению проходного сечения крыльчатки, путем поворота лопастей 12, в соответствии с программой ветви сжатия на реализуемой характеристике сопротивлений амортизатора. Значение потенциала пропорционально скорости перемещения поршня 4. В зависимости от величины потенциала управляющее устройство 35 вырабатывает необходимое число импульсов тока и посылает их в шаговый электродвигатель 32. Его ротор вместе с червяком 30 поворачиваются в соответствии с указанным числом на угол, обеспечивающий изменение проходного сечения каналов крыльчатки до значения, создающего сопротивление сжатию с силой, которая для конкретной скорости перемещения поршня регламентируется программой реализуемой характеристики. Происходит это путем взаимодействия червячного механизма 31, первого планетарного ряда 21, второго планетарного ряда 25 и дифференциала 19. При повороте червяка 30 эпициклическая шестерня 28 второго планетарного ряда 25 занимает новое угловое положение. А так как сателлиты 22 и 24 соответственно первого 21 и второго 25 планетарных рядов свободно сидят на общей оси 23, шестерня 18 сдвигается на определенный угол относительно шестерни 17 дифференциала 19. Это угловое смещение обуславливает одновременный поворот шестерен 16 вместе с лопастями 12 на угол, при котором пропускная способность крыльчатки, а следовательно, и сила сопротивления сжатию соответствуют скорости перемещения поршня на ветви сжатия реализуемой характеристики сопротивлений амортизатора.
При угловом отклонении лопастей 12 от исходного положения крыльчатка вращается, вследствие разности давлений перед ней и за ней.
При отбое поршень 4 начинает перемещаться вверх, в результате чего рабочая жидкость перетекает из верхней части гидравлической полости 5 цилиндра в нижнюю часть по каналам 8 через гидравлическую полость 9 преобразователя 10 энергии.
За счет движущегося магнитного поля поршня 4 на верхней катушке 33 индуктивного датчика его перемещения возникает положительный потенциал. Знак последнего служит управляющему устройству 35 (фиг.2) основанием для выработки воздействия по изменению проходного сечения крыльчатки, путем поворота лопастей 12, в соответствии с программой ветви отбоя на реализуемой характеристике сопротивлений амортизатора. Отклонение лопастей от исходного положения при отбое происходит в сторону, обеспечивающую то же направление вращения валика 15, что и при сжатии. Значение потенциала пропорционально скорости перемещения поршня 4. Управляющее устройство 35 вырабатывает необходимое число импульсов тока и посылает их в шаговый электродвигатель 32. Его ротор вместе с червяком 30 поворачиваются в соответствии с указанным числом импульсов на угол, обеспечивающий изменение проходного сечения каналов крыльчатки до значения, создающего сопротивление отбою с силой, которая для конкретной скорости перемещения поршня регламентируется программой реализуемой характеристики. Происходит это путем взаимодействия червячного механизма 31, первого планетарного ряда 21, второго планетарного ряда 25 и дифференциала 19.
Сопоставительный анализ с прототипом показывает, что заявляемое устройство отличается тем, что в основу его конструкции и работы положено наличие верхней и нижней катушек индуктивного датчика перемещения поршня, выполненного с магнитным полем, гидравлической полости цилиндра, поделенной поршнем на верхнюю и нижнюю части, соединенные с гидравлической полостью преобразователя энергии, который включает в себя крыльчатку, установленную на валике и состоящую из бандажного кольца и поворотных лопастей, размещенных между ним и пояском валика, связанную через дифференциал, червячный и двухрядный планетарный механизмы с шаговым электродвигателем, обеспечивающим посредством управляющего устройства, соединенного с верхней и нижней катушками, изменение проходного сечения каналов крыльчатки.
Вышеперечисленные признаки позволяют сделать вывод о соответствии заявляемого изобретения критерию “новизна”.
Существующие технологии машиностроения и применяемые в нем материалы позволяют организовать промышленное изготовление и оснащение транспортных средств крыльчатыми амортизаторами.
Использованные источники информации
1. Дербаремдикер А.Д. Гидравлические амортизаторы автомобилей. М., Машиностроение, 1969, с.6, рис. 26 (аналог).
2. Патент GB №1239627, кл. F 16 F 9/08, опубликован 25.09.1969 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| КРЫЛЬЧАТЫЙ АМОРТИЗАТОР | 2002 |
|
RU2269703C2 |
| РЕГУЛИРУЕМЫЙ ОДНОТРУБНЫЙ ГАЗОНАПОЛНЕННЫЙ АМОРТИЗАТОР | 2003 |
|
RU2263238C2 |
| ЭЛЕКТРОМАГНИТНЫЙ АМОРТИЗАТОР | 2012 |
|
RU2496035C1 |
| РЕГУЛИРУЕМЫЙ АМОРТИЗАТОР | 2005 |
|
RU2304053C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2013 |
|
RU2513055C1 |
| ГИДРАВЛИЧЕСКИЙ АМОРТИЗАТОР ПОДВЕСКИ АВТОМОБИЛЯ | 2002 |
|
RU2297561C2 |
| ГИДРАВЛИЧЕСКИЙ АМОРТИЗАТОР ПОДВЕСКИ АВТОМОБИЛЯ | 2003 |
|
RU2303180C2 |
| РЕГУЛИРУЕМЫЙ АМОРТИЗАТОР | 2002 |
|
RU2253576C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1997 |
|
RU2146010C1 |
| Суммирующий индуктивный топливомер-расходомер | 2023 |
|
RU2807437C1 |
Изобретение относится к транспортному машиностроению, а именно к подвеске транспортных средств, системам привода рулевого управления. Сущность изобретения заключается в том, что однотрубный газонаполненный амортизатор содержит цилиндр и поршень. Амортизатор имеет верхнюю и нижнюю катушки индуктивного датчика перемещения поршня, выполненного с магнитным полем, гидравлическую полость цилиндра, поделенную поршнем на верхнюю и нижнюю части, соединенные с гидравлической полостью преобразователя энергии. Последний включает в себя крыльчатку, установленную на валике и состоящую из бандажного кольца и поворотных лопастей, размещенных между ним и пояском валика, связанную через дифференциал, двухрядный планетарный механизм и червячный механизм с шаговым электродвигателем. Шаговый электродвигатель обеспечивает посредством управляющего устройства, соединенного с верхней и нижней катушками, изменение проходного сечения каналов крыльчатки. Техническим результатом является полезное использование энергии колебаний транспортного средства и исключение упругих клапанных элементов. 2 ил.
Однотрубный газонаполненный амортизатор, содержащий цилиндр и поршень, отличающийся тем, что он имеет верхнюю и нижнюю катушки индуктивного датчика перемещения поршня, выполненного с магнитным полем, гидравлическую полость цилиндра, поделенную поршнем на верхнюю и нижнюю части, соединенные с гидравлической полостью преобразователя энергии, который включает в себя крыльчатку, установленную на валике и состоящую из бандажного кольца и поворотных лопастей, размещенных между ним и пояском валика, связанную через дифференциал, двухрядный планетарный механизм и червячный механизм с шаговым электродвигателем, обеспечивающим посредством управляющего устройства, соединенного с верхней и нижней катушками, изменение проходного сечения каналов крыльчатки.
| Преобразователь фазового сдвига во временной интервал | 1984 |
|
SU1239627A2 |
| АМОРТИЗАТОР | 2000 |
|
RU2184891C2 |
| ИНТРАОРАЛЬНЫЙ ЭНДОСКОП | 2021 |
|
RU2773600C1 |

