Изобретение относится к транспортному машиностроению, а именно к подвеске транспортных средств.
Аналогом заявляемого изобретения является амортизатор [1], содержащий цилиндр, поршень, шток, направляющую втулку, гидравлическую полость, заполненную рабочей жидкостью и разделенную поршнем на нижнюю и верхнюю части, соединенные между собой каналами поршня, а также клапаны с упругими элементами, газовую полость и разделитель, отделяющий ее от гидравлической полости.
Параметры упругих элементов однозначно определяют характеристику сопротивлений (зависимость сил сопротивлений от скорости перемещения поршня) амортизатора, вследствие чего конструкция аналога позволяет реализовать только одну такую характеристику.
Значения сил сопротивлений амортизатора с клапанами, основанными на упругих элементах, имеют поле допуска. В связи с этим фактические силы сопротивления могут отличаться от их номинальных значений.
Кроме того, силы сопротивления аналога в процессе эксплуатации уменьшаются со временем из-за снижения жесткости упругих элементов.
Прототипом заявляемого изобретения служит регулируемый амортизатор [2], содержащий цилиндр, поршень, шток, гидравлическую полость, заполненную рабочей жидкостью и разделенную поршнем на нижнюю и верхнюю части, соединенные между собой каналами, а также клапаны с упругими элементами и управляющее устройство, связанное с электродвигателем. Ротор электродвигателя, функционально являющийся его якорем, соединен с регулирующим элементом в виде золотника, размещенного в штоке и имеющего возможность поворачиваться в нем. Корпус электродвигателя, выполняющий функцию индуктора (источника магнитного поля) с постоянными магнитами, установлен неподвижно на хвостовике штока. С целью обеспечения подвода тока в обмотку якоря, имеющего возможность поворачиваться, электродвигатель снабжен токосъемным устройством.
Конструкция прототипа частично устраняет недостатки, присущие аналогу. Посредством поворота золотника в ту или иную сторону устанавливается одно из двух значений проходного сечения канала, соединяющего две части гидравлической полости. Варьированием проходного сечения обеспечивается изменение характеристики сопротивлений амортизатора.
Однако значения сил сопротивления прототипа определяются, как и у аналога, параметрами упругих клапанных элементов. К тому же, наличие только двух значений проходного сечения регулируемого канала обуславливает возможность реализации всего двух характеристик сопротивлений амортизатора. Кроме того, размещение регулирующего элемента (золотника) в штоке накладывает ограничения на диапазон регулирования такой характеристики.
Технической задачей заявляемого изобретения являются исключение из амортизатора упругих клапанных элементов и расширение диапазона регулирования его характеристики сопротивлений.
Техническая задача решается тем, что у регулируемого амортизатора в одном из каналов поршня размещен датчик давления двустороннего действия, при этом якорь шагового электродвигателя связан с управляющим устройством и неподвижно закреплен на штоке, а индуктор шагового электродвигателя размещен в поршне с возможностью поворота относительно якоря и выполнен с плоской крышкой, имеющей выступающие кольцевые секторы с отверстиями для изменения проходного сечения каналов поршня.
На фигуре 1 изображен общий вид регулируемого амортизатора.
Регулируемый амортизатор содержит цилиндр 1, шток 2 с размещенными в нем проводами 3, направляющую втулку 4, поршень 5, гидравлическую полость 6, разделенную поршнем 5 на нижнюю и верхнюю части, а также газовую полость 7 и разделитель 8, отделяющий гидравлическую полость 6 от газовой полости 7. Нижняя и верхняя части гидравлической полости 6 соединены между собой каналами 9 поршня 5.
В одном из каналов 9 поршня 5 размещен датчик давления двустороннего действия, который состоит из нижней и верхней пьезоэлектрических пластин 10, а также металлического диска 11, расположенного между ними. Он служит общим проводом пластин 10, включенных в электрическую цепь управления шаговым электродвигателем. Якорь 12 шагового электродвигателя неподвижно закреплен на штоке 2. В поршне 5 наряду с датчиком давления размещен индуктор 13 (на постоянных магнитах) шагового электродвигателя с возможностью поворота относительно якоря 12 шагового электродвигателя. Плоская крышка 14 индуктора 13 имеет выступающие кольцевые секторы 15 с выполненными в них отверстиями. Якорь 12 шагового электродвигателя связан проводами 3 с управляющим устройством 16 (на фигуре 1 не показано).
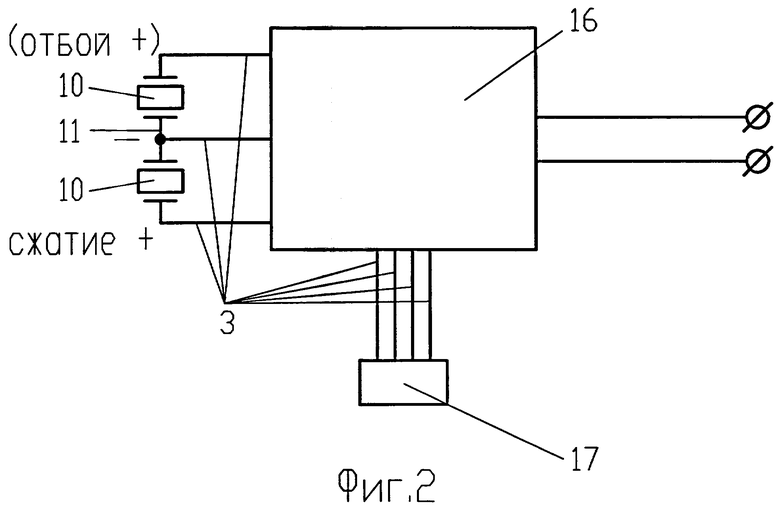
Схема управления шаговым электродвигателем представлена на фигуре 2. В схему входит управляющее устройство 16, вырабатывающее управляющие импульсы в зависимости от давления рабочей жидкости и подающее их в обмотку 17 (на фигуре 1 не показана) якоря 12 (фигура 1) шагового электродвигателя. Управляющее устройство 16 (фигура 2) обеспечивает возможность реализации характеристики сопротивлений в широком диапазоне сил, регламентируемом надежностью амортизатора.
Амортизатор работает следующим образом.
При равенстве давлений рабочей жидкости в обеих частях гидравлической полости 6 (фигура 1) индуктор 13 вместе со своей крышкой 14 находятся в крайнем положении движения против часовой стрелки на (сечении А-А). Это положение - стартовое для шагового электродвигателя. В таком состоянии каналы 9 из одной части гидравлической полости 6 в другую часть, полностью перекрыты кольцевыми секторами 15 крышки 14.
При сжатии поршень 5 начинает перемещаться вниз, в результате чего давление рабочей жидкости в нижней части гидравлической полости 6 становится больше, чем в ее верхней части. Датчик давления вырабатывает электрический сигнал, при котором положительный потенциал образуется на нижней пьезоэлектрической пластине 10 датчика. Величина сигнала пропорционально давлению жидкости и, следовательно, скорости перемещения поршня 5. Положительный потенциал нижней пластины 10 служит командой управляющему устройству 16 (фигура 2) для выработки воздействия по изменению проходного сечения каналов 9 (фигура 1) в соответствии с программой ветви сжатия на реализуемой характеристике сопротивлений амортизатора. Управляющее устройство 16 (фигура 2) вырабатывает необходимое число импульсов тока и передает их в обмотку 17 якоря 12 (фигура 1) шагового электродвигателя. В соответствии с указанным числом импульсов индуктор 13 вместе с крышкой 14 поворачиваются на угол, обеспечивающий изменение проходного сечения каналов 9, до значения, создающего сопротивление сжатию с силой, которая для конкретной скорости перемещения поршня при сжатии регламентируется программой реализуемой характеристики. Проходное сечение меняется за счет изменения степени перекрытия каналов 9, предназначенных для перетекания рабочей жидкости, кольцевыми выступами 15 крышки 14 индуктора 13 при повороте последнего.
При отбое поршень 5 начинает перемещаться вверх, в результате чего давление рабочей жидкости в верхней части гидравлической полости 6 становится больше, чем в ее нижней части. Датчик давления вырабатывает электрический сигнал, при котором положительный потенциал образуется на верхней пьезоэлектрической пластине 10 датчика. Величина сигнала пропорциональна давлению жидкости и, следовательно, скорости перемещения поршня 5. Положительный потенциал верхней пластины 10 служит командой управляющему устройству 16 (фигура 2) для выработки воздействия по изменению проходного сечения каналов 9 (фигура 1) в соответствии с программой ветви отбоя на реализуемой характеристике сопротивлений амортизатора. Управляющее устройство 16 (фигура 2) вырабатывает необходимое число импульсов тока и передает их в обмотку 17 якоря 12 (фигура 1) шагового электродвигателя. В соответствии с указанным числом импульсов индуктор 13 вместе с крышкой 14 поворачиваются на угол, обеспечивающий изменение проходного сечения каналов 9 до значения, создающего сопротивление отбою с силой, которая для конкретной скорости перемещения поршня при отбое регламентируется программой реализуемой характеристики. Проходное сечение меняется за счет изменения степени перекрытия каналов 9, предназначенных для перетекания рабочей жидкости, кольцевыми выступами 15 крышки 14 индуктора 13 при повороте последнего.
Максимальная реализуемая в амортизаторе сила сопротивления достигается, когда индуктор 13 вместе со своей крышкой 14 находятся в крайнем положении движения по часовой стрелке (на сечении А-А). Это положение - "стоп" для шагового электродвигателя. В таком состоянии каналы 9, предназначенные для перетекания рабочей жидкости, полностью открыты.
Сопоставительный анализ с прототипом показывает, что заявляемый амортизатор отличается тем, что в одном из каналов поршня размещен датчик давления двустороннего действия, при этом якорь шагового электродвигателя связан с управляющим устройством и неподвижно закреплен на штоке, а индуктор шагового электродвигателя размещен в поршне с возможностью поворота относительно якоря и выполнен с плоской крышкой, имеющей выступающие кольцевые секторы с отверстиями для изменения проходного сечения каналов поршня.
Вышеперечисленные признаки позволяют сделать вывод о соответствии заявляемого изобретения критерию “новизна”.
Существующие технологии машиностроения и применяемые в нем материалы позволяют организовать промышленное изготовление регулируемых амортизаторов и оснащение ими транспортных средств.
Источники информации
1. Раймпель Й. Шасси автомобиля. Амортизаторы, шины и колеса. М.: “Машиностроение”, 1986, стр.33, рис.1.30 (аналог).
2. Амортизатор KAYABA 443218 (Nissan 56210) для автомобилей Nissan Bluebird, Bluebird U (VRU 11, VEU 11) 10.1983 г. - 1986 г. Каталог “KAYABA 2001. SHOCK ABSORBER”. KAYABA Europe GmbH Breit Strasse 10 В 40670 Meerbusch Germany, стр.116 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛИРУЕМЫЙ АМОРТИЗАТОР | 2005 |
|
RU2304053C1 |
| КРЫЛЬЧАТЫЙ АМОРТИЗАТОР | 2003 |
|
RU2253771C2 |
| РЕГУЛИРУЕМЫЙ ОДНОТРУБНЫЙ ГАЗОНАПОЛНЕННЫЙ АМОРТИЗАТОР | 2003 |
|
RU2263238C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ ВИБРОСТЕНДА | 2017 |
|
RU2671928C1 |
| АДАПТИВНЫЙ АМОРТИЗАТОР ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2469225C1 |
| АМОРТИЗАТОР ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2594317C2 |
| АДАПТИВНЫЙ АМОРТИЗАТОР ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2479766C1 |
| АДАПТИВНЫЙ АМОРТИЗАТОР ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2469224C1 |
| МАГНИТОРЕОЛОГИЧЕСКИЙ АМОРТИЗАТОР | 2002 |
|
RU2232316C2 |
| АДАПТИВНЫЙ АМОРТИЗАТОР ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2474739C1 |
Изобретение относится к транспортному машиностроению, а именно к подвеске транспортных средств. В регулируемом амортизаторе имеются размещенные в поршне датчик давления двустороннего действия и шаговый электродвигатель, якорь которого неподвижно закреплен на штоке, а индуктор снабжен крышкой с выступающими кольцевыми выступами и выполненными в них отверстиями. Датчик вырабатывает электрический сигнал, пропорциональный скорости перемещения поршня. Сигнал передается в управляющее устройство, которое вырабатывает необходимое число импульсов и подает их в обмотку якоря шагового электродвигателя. Индуктор с крышкой поворачиваются на угол, обеспечивающий изменение проходного сечения каналов в поршне до значения, создающего сопротивление с силой, которая для конкретных хода и скорости перемещения поршня регламентируется программой реализуемой характеристики сопротивлений. Технический результат - исключение из амортизатора упругих клапанных элементов и расширение диапазона регулирования его характеристики сопротивлений. 2 ил.

Регулируемый амортизатор, содержащий цилиндр с гидравлической полостью, шток, поршень, разделяющий гидравлическую полость на нижнюю и верхнюю части, соединенные между собой каналами поршня, и управляющее устройство, связанное с шаговым электродвигателем, отличающийся тем, что в каналах поршня размещены датчики давления двустороннего действия, при этом якорь шагового электродвигателя связан с управляющим устройством и неподвижно закреплен на штоке, а индуктор шагового электродвигателя размещен в поршне с возможностью поворота относительно якоря и выполнен с плоской крышкой, имеющей выступающие кольцевые секторы с отверстиями для изменения проходного сечения каналов поршня.
| Разделительный клапан | 1971 |
|
SU443218A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| SHOCK ABSORBER” | |||
| Устройство для сборки под сварку стыковых швов изделий сложной формы | 1981 |
|
SU956210A1 |
| Шланговое соединение | 0 |
|
SU88A1 |
| АМОРТИЗАТОР С РЕГУЛИРУЕМОЙ СИЛОЙ ГРУЗОПОДЪЕМНОСТИ И ГИДРОДЕМПФИРОВАНИЯ | 1991 |
|
RU2031275C1 |
| МАГНИТОРЕОЛОГИЧЕСКИЙ ВИБРОГАСИТЕЛЬ | 1994 |
|
RU2106551C1 |
| US 3146862 A, 01.09.1964 | |||
| DE 3309042 А, 20.09.1984 | |||
| Промежуточная станция для контейнеров трубопроводного гидротранспорта | 1981 |
|
SU1096171A1 |
| WO 00/52354, 08.09.2000. | |||

