Изобретение относится к области авиационных управляемых ракет и может использоваться для решения задачи наведения ракеты на воздушную цель и для информационного обеспечения функционирования боевого снаряжения АУР.
Известен способ функционирования информационно-вычислительной системы ракеты, заключающийся в измерении параметров движения цели и собственного движения ракеты, формирование необходимых параметров относительного и абсолютного движения, не поддающихся непосредственному измерению, на основе использования априорных сведений, выборе метода наведения ракеты на цель, наилучший по какому-либо критерию для данных условий применения, анализе помеховой обстановки и включении в зависимости от обстановки средств помехозащиты, нерадиотехнических измерителей, перенацеливание ракеты на постановщик помех, формирование сигнала подготовки и управления для радиовзрывателя (Меркулов, В.Н.Лепин Авиационные системы радиоуправления. - М.: Радио и связь, 1997 г., с.201).
Известно устройство, в состав которого входит последовательно соединенный приемник сигнала синхронизации, приемник отраженного сигнала, а также система автономных датчиков и модуль обработки информации, вычислитель и усилитель мощности, причем выход приемника синхронизации соединен с первым входом модуля обработки информации, выход приемника отраженного сигнала со вторым входом модуля обработки информации, первый и второй выход системы датчиков соответственно с третьим и четвертым входами модуля обработки информации, пятый вход которого соединен с усилителем мощности и приводом антенны, которая имеет механическую связь с антенной, первый, второй, третий и четвертый выходы которых соединены соответственно с шиной сигнала контроля и обратной связи в аппаратуру истребителя, на первый и второй вход вычислителя параметров рассогласования, на вход усилителя мощности и привода антенны, выход которого имеет механическую связь с антенной (Меркулов В.И., Лепин В.Н. Авиационные системы радиоуправления. - М.: Радио и связь, 1997 г., с.201).
Недостатком данного способа и устройства является слабое информационное обеспечение функционирования боевого снаряжения АУР в связи с отсутствием возможности получения дополнительной информации о воздушной цели и параметрах ее движения на борту ракеты.
Технической задачей изобретения является повышения эффективности боевого применения АУР за счет использования дополнительной информации о воздушной цели и параметрах ее движения в интересах боевого снаряжения АУР класса "в-в".
Решение технической задачи достигается тем, что в способе функционирования информационно-вычислительной системы ракеты, заключающемся в измерении параметров движения цели и собственного движения ракеты, формировании необходимых параметров относительного и абсолютного движения, не поддающихся непосредственному измерению, на основе использования априорных сведений, выборе метода наведения ракеты на цель, наилучшего по какому-либо критерию для данных условий применения, анализе помеховой обстановки и включении в зависимости от обстановки средств помехозащиты и нерадиотехнических измерителей, перенацеливания ракеты на постановщик помех, формирования сигнала подготовки и управления для радиовзрывателя, дополнительно определяют на основе исходной информации об угловом положении и дальности до цели, в непосредственной близости от цели, скорость сближения ракеты, геометрические размеры цели, промах ракеты и формируют команду на подрыв боевой части ракеты на основе данной информации, с учетом начальной скорости разлета осколков боевой части ракеты.
Скорость сближения ракеты в непосредственной близости от цели определяют в момент прохода целью второго и третьего фиксированных расстояний в виде выражения: 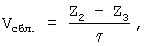
где Z2, Z3 - второе и третье фиксированные расстояния до цели, τ - временной интервал пропорциональной скорости движения цели при проходе данных фиксированных расстояний Линейный размер протяженной цели определяют в момент прохода ею второго фиксированного расстояния, путем сканирования ее диаграммой излучения и фиксации угловых положений и дальности до начальной и конечной точек на протяженной цели соответственно в момент появления и пропадания отраженного сигнала от цели в виде выражения:

где D1, d2 - угловое положение начальной и соответственно конечной точки на теле цели; Δ ϕ =ϕ н-ϕ к - угловой размер цели.
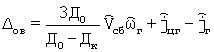
Величину промаха ракеты определяют в виде выражения:

где А, В, С - постоянные коэффициенты, r1, r2, r3 - текущие расстояния, фиксируемые при проходе целью трех заданных расстояний.
Команду на подрыв боевой части ракеты формируют в виде выражения:
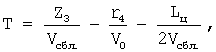
где V0 - начальная скорость разлета осколков.
В устройство для реализации способа функционирования информационно-вычислительной системы, содержащее последовательно соединенные антенну и приемник сигнала синхронизации, антенну и приемник отраженного сигнала, модуль обработки информации и вычислитель параметров рассогласования, а также систему автономных датчиков, усилитель мощности и привод антенны, модуль обработки информации, состоящее из устройства поиска, обнаружения, селекции и анализа сигналов, канала оценивания дальности и скорости сближения, канала управления антенной, где его выход механически связан с антенной отраженного сигнала, выход приемника отраженного сигнала соединен с первым входом модуля обработки информации, второй, третий, четвертый, пятый, шестой, седьмой входы которого соответственно соединены с первым выходом приемника сигналов синхронизации, первым и вторым выходом системы автономных датчиков, с выходом команд подготовки и целеуказания из аппаратуры истребителя, которые одновременно соединены с третьим входом вычислителя параметров рассогласования, с выходом вычислителя автономной системы, первым выходом усилителя мощности и привода антенны, второй выход которого механически соединен с антенной отраженного сигнала, при этом первый, второй третий, выходы модуля обработки информации соединены соответственно с входом сигналов контроля и обратной связи аппаратуры истребителя, первым и вторым входом вычислителя параметров рассогласования, кроме того второй выход приемника синхронизации соединен со вторым входом приемника отраженного сигнала, дополнительно введены ключ и вычислитель формирования команды на подрыв боевой части ракеты, первый, второй входы которого соединены соответственно с первым и вторым выходами модуля обработки информации, третий вход с выходом приемника отраженного сигнала, первый выход соединен со вторым входом ключа, первый вход которого соединен со вторым выходом канала управления антенной, а выход ключа соединен с первым входом усилителя мощности и привода антенны, второй вход которого соединен со вторым входом вычислителя формирования команды на подрыв боевой части ракеты, третий вход которого является выходом команды на подрыв боевой части ракеты.
Кроме того, вычислитель формирования команды на подрыв боевой части ракеты состоит из блока фиксации текущих параметров движения цели, блока определения промаха ракеты, блока определения геометрических размеров цели, блока формирования команды на подрыв боевой части ракеты, причем первый и второй входы блока фиксации текущих параметров движения цели и блока определения геометрических размеров цели соединены соответственно с выходом канала оценивания дальности и скорости сближения цели и выходом канала управления антенной, первый, второй третий, четвертый и пятый и шестой выходы блока фиксации текущих параметров движения цели соединены соответственно с первым, вторым и третьим входами блока определения промаха ракеты, со вторым, третьим входом блока формирования команды на подрыв боевой части ракеты и третьим и четвертым входом блока определения геометрических размеров цели, пятый вход которого соединен с выходом приемника отраженного сигнала, а первый выход является вторым выходом вычислителя формирования команды на подрыв боевой части ракеты и соединен с первым входом усилителя мощности и привода антенны, второй и третий выходы блока определения геометрических размеров цели соединены соответственно с четвертым и пятым входами блока формирования команды на подрыв боевой части ракеты, первый вход которого соединен с выходом блока определения промаха ракеты, а выход является третьим выходом вычислителя формирования команды на подрыв боевой части ракеты.
Кроме того, блок фиксации текущих параметров движения цели состоит из функционального преобразователя, первого умножителя первой, второй и третьей схем сравнения, первого, второго и третьего запоминающего устройства, а также задатчика постоянных сигналов, причем вход функционального преобразователя соединен с выходом канала управления антенной, а выход с первым входом первого умножителя, второй вход которого соединен с выходом канала оценивания дальности и скорости сближения, а выход с первыми входами первой, второй, третьей схемы сравнения, вторые входы которых соединены соответственно с первым, вторым и третьим выходом задатчика постоянных сигналов, а четвертый выход его соединен со вторым входом блока формирования команды на подрыв боевой части ракеты, выход схем сравнения соединены соответственно первыми входами первого, второго и третьего запоминающих устройств, вторые входы которых соединены с выходом канала оценивания дальности и скорости сближения.
Кроме того, блок определения промаха ракеты состоит из первого, второго и третьего квадратора, второго, третьего умножителей, первого вычитающего и второго суммирующего устройства, второго функционального преобразователя, а также из второго задатчика постоянного сигнала, причем первый, второй, третий выходы блока фиксации текущих параметров движения цели соединены со входам первого, второго и третьего квадратора, выходы которых соединены соответственно с первыми входами второго, третьего и четвертого умножителей, вторые входы которых соединены с соответственно первым, вторым и третьим выходом второго задатчика постоянных сигналов, выходы второго и третьего умножителей соединены с первым и вторым входами первого вычитающего устройства, выход которого соединен с первым входом второго суммирующего устройства, второй вход которого соединен с выходом четвертого умножителя, а выход второго суммирующего устройства соединен со входом второго функционального преобразователя извлечения квадратного корня, выход которого соединен с первым входом блока формирования команды на подрыв боевой части ракеты.
Кроме того, блок определения геометрических размеров цели состоит из элемента И, элемента И-НЕ, генератора импульсов, счетчика импульсов и последовательно соединенных сдвигового регистра, цифроаналогового преобразователя, а также из третьего, четвертого, пятого и шестого запоминающих устройств, третьего и четвертого квадратора, третьего сумматора, второго и третьего вычитающего устройства, третьего и четвертого функционального преобразователя, пятого умножителя третьего задатчика постоянных сигналов, причем выход приемника отраженного сигнала соединен с первым входом элемента И, и одновременно входом элемента И-НЕ, выход блока фиксации текущих параметров движения цели соединен со вторым входом элемента И, выход которого соединен одновременно со входом генератора импульсов, первыми входами третьего и пятого запоминающего устройства, вторые входы которых соединены соответственно с выходом канала оценивания дальности и канала управления антенной, выход элемента И-НЕ соединен с первыми входами сдвигового регистра, четвертого и шестого запоминающего устройства, выход канала оценивания дальности и скорости сближения соединен со входами третьего и четвертого запоминающего устройства, выходы которых соединены соответственно со входами третьего и четвертого квадратора, выходы которых соединены с первым и вторым входом третьего сумматора, выход которого соединен с первым входом второго вычитающего устройства, выход пятого и шестого запоминающего устройства соединен соответственно с первым и вторым входами третьего вычитающего устройства, выход которого соединен с входом функционального преобразователя, выход которого соединен с первым входом пятого умножителя, второй и третий вход которого соединен соответственно с выходом третьего и четвертого запоминающих устройств, а выход - со вторым входом второго вычитающего устройства, выход которого соединен с входом четвертого функционального преобразователя, выход которого соединен с третьим входом блока формирования команды на подрыв боевой части ракеты, выход генератора импульсов соединен с первым входом счетчика импульсов, а второй вход соединен с шестым выходом блока фиксации текущих параметров движения цели, а выход счетчика является вторым выходом блока определения геометрических размеров цели, первым и третьим выходом которого является соответственно выход цифроаналогового преобразователя и четвертого функционального преобразователя.
Кроме того, блок формирования команды на подрыв боевой части ракеты состоит из первого, второго и третьего делителя, четвертого вычитающего устройства, причем четвертый выход блока фиксации текущих параметров движения цели, выход блока определения промаха и третий выход блока определения геометрических размеров цели соединены с первыми входами первого, второго и третьего делителя, выход канала оценивания дальности и скорости сближения соединен одновременно со вторыми входами первого и третьего делителя, пятый выход блока фиксации текущих параметров движения цели соединен со вторым входом второго делителя, выходы первого, второго и третьего делителей соединены соответственно с первым, вторым и третьим входами четвертого вычитающего устройства, выход которого является выходом блока формирования команды на подрыв боевой части ракеты.
Сопоставительный анализ с прототипом, показывает, что заявляемые способ и устройство отличаются наличием новых действий и новых элементов схемы и новых связей, обеспечивающих технический результат изобретения, что позволяет сделать вывод о наличии в данном техническом решении критерия патентоспособности "новизна", а именно в способе:
1) определяют скорость сближения ракеты с целью в момент прохода второго и третьего фиксированного расстояния;
2) определяют геометрические размеры цели;
3) определяют промах ракеты относительно цели;
4) формируют команду на подрыв боевой части ракеты на основе данной информации, с учетом скорости разлета осколков боевой части ракеты, а в устройство введены ключ и вычислитель формирования команды на подрыв боевой части ракеты.
Сравнение заявляемого решения с другими техническими решениями, показывает, что, оно явным образом не следует из уровня техники, заявляемых способе и устройстве расширены функциональные возможности за счет управления моментом срабатывания боевой части АУР в соответствии с конкретными условиями подхода ракеты к цели.
Это позволяет сделать вывод о соответствии заявляемого изобретения критерию "существенные отличия".
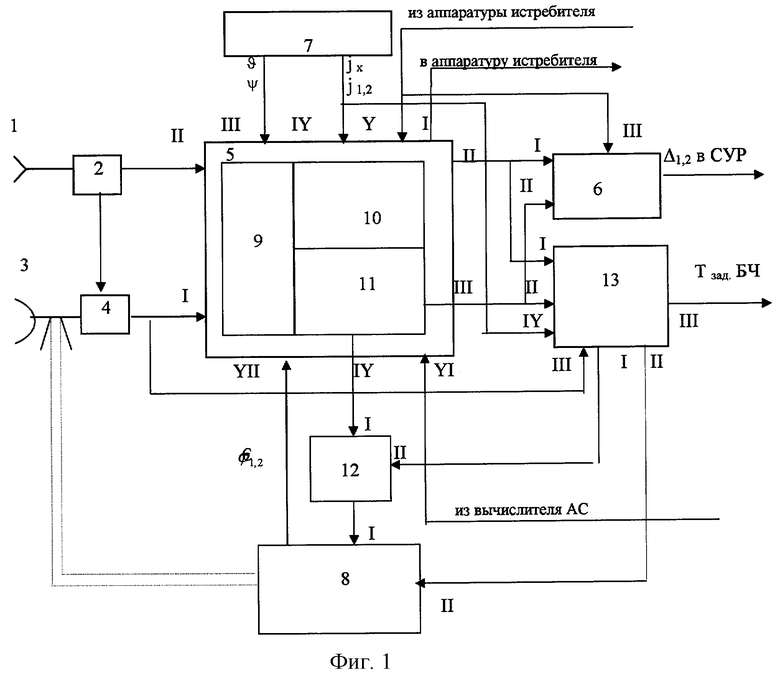
На фиг.1 приведена структурная схема информационно-вычислительной системы ракеты, на фиг.2, 3 - схема сближения ракеты с целью, на фиг.4 - структурная схема вычислителя формирования на подрыв боевой части ракеты, на фиг.5 - блок фиксации текущих параметров движения цели, на фиг.6 - блок определения промаха, на фиг.7 - блок определения геометрических размеров цели, на фиг.8 - блок формирования команды на подрыв боевой части ракеты.
Устройство (фиг.1) для функционирования информационно-вычислительной системы, содержит последовательно соединенные антенну 1 и приемник 2 сигнала синхронизации, антенну 3 и приемник 4 отраженного сигнала, модуль 5 обработки информации и вычислитель 6 параметров рассогласования, а также систему 7 автономных датчиков, усилитель 8 мощности и привод антенны, ключ 12 и вычислитель 13 формирования команды на подрыв боевой части ракеты, модуль 5 обработки информации состоит из устройства 9 поиска, обнаружения, селекции и анализа сигналов, канала 10 оценивания дальности и скорости сближения, канала 11 управления антенной, причем его выход механически связан с антенной 3 отраженного сигнала, выход приемника 4 отраженного сигнала соединен с первым входом модуля 5 обработки информации, второй, третий, четвертый, пятый, шестой, седьмой входы которого соответственно соединены с первым выходом приемника 2 сигналов синхронизации, первым и вторым выходом системы 7 автономных датчиков, с выходом команд подготовки и целеуказания из аппаратуры истребителя, которые одновременно соединены с третьим входом вычислителя 6 параметров рассогласования, с выходом вычислителя автономной системы, первым выходом усилителя 8 мощности и привода антенны, второй выход которого механически соединен с антенной 3 отраженного сигнала, при этом первый, второй третий, выходы модуля 5 обработки информации соединены соответственно с входом сигналов контроля и обратной связи аппаратуры истребителя, первым и вторым входом вычислителя 6 параметров рассогласования, кроме того, второй выход приемника 2 синхронизации соединен со вторым входом приемника 4 отраженного сигнала, первый, второй входы вычислителя 13 формирования команды на подрыв боевой части ракеты соединены соответственно с первым и вторым выходами модуля 5 обработки информации, третий вход с выходом приемника 4 отраженного сигнала, первый выход соединен со вторым входом ключа 12, первый вход которого соединен со вторым выходом канала 11 управления антенной, а выход ключа 12 соединен с первым входом усилителя 8 мощности и привода антенны, второй вход которого соединен со вторым входом вычислителя 13 формирования команды на подрыв боевой части ракеты, третий вход которого является выходом команды на подрыв боевой части ракеты.
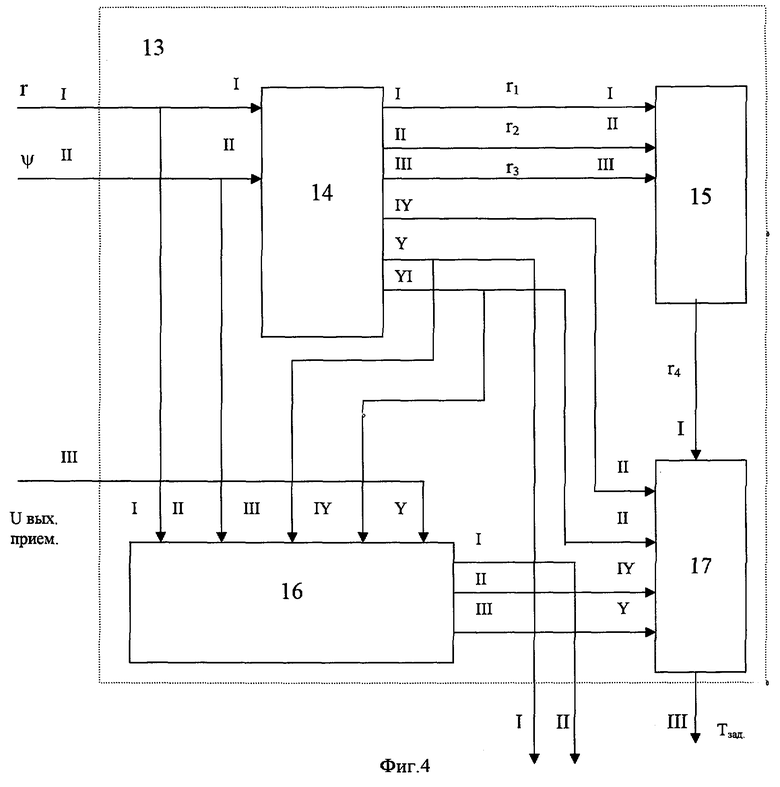
Вычислитель 13 формирования команды на подрыв боевой части ракеты состоит из блока 14 фиксации текущих параметров движения цели, блока 15 определения промаха ракеты, блока 16 определения геометрических размеров цели, блока 17 формирования команды на подрыв боевой части ракеты, причем первый и второй входы блока 14 фиксации текущих параметров движения цели и блока 16 определения геометрических размеров цели соединены соответственно с выходом канала 10 оценивания дальности и скорости сближения цели и выходом канала 11 управления антенной, первый, второй третий, четвертый и пятый и шестой выходы блока 14 фиксации текущих параметров движения цели соединены соответственно с первым, вторым и третьим входом блока 15 определения промаха ракеты, со вторым, третьим входом блока 17 формирования команды на подрыв боевой части ракеты и третьим и четвертым входом блока 16 определения геометрических размеров цели, пятый вход которого соединен с выходом приемника 4 отраженного сигнала, а первый выход является вторым выходом вычислителя 13 формирования команды на подрыв боевой части ракеты и соединен с первым входом усилителя 8 мощности и привода антенны, второй и третий выход блока 16 определения геометрических размеров цели соединен соответственно с четвертым и пятым входом блока 17 формирования команды на подрыв боевой части ракеты, первый вход которого соединен с выходом блока 15 определения промаха ракеты, а выход является третьим выходом вычислителя 13 формирования команды на подрыв боевой части ракеты.
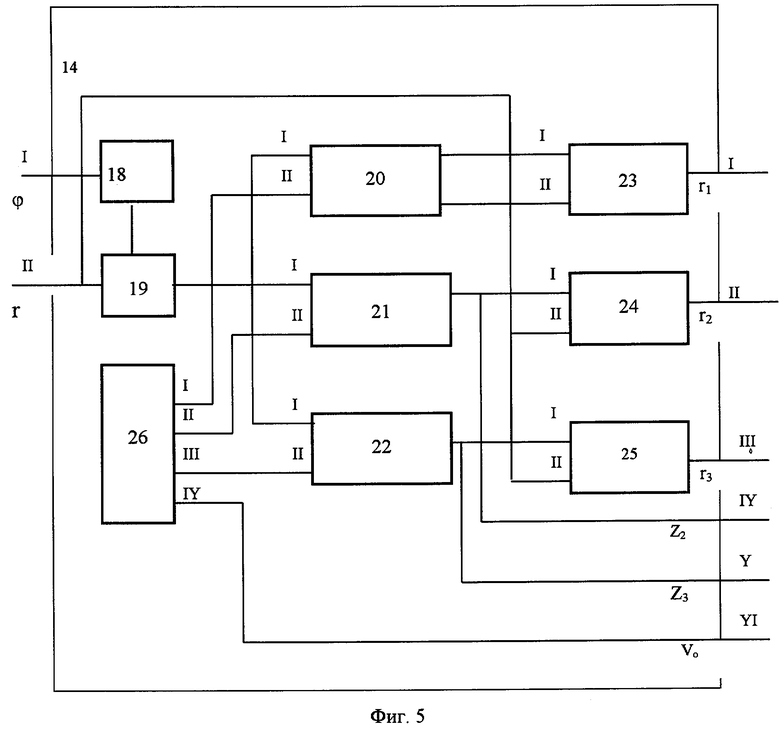
Блок 14 фиксации текущих параметров движения цели состоит из функционального преобразователя 18, первого 19 умножителя, первой 20, второй 21 и третьей 22 схемы сравнения, первого 23, второго 24 и третьего 25 запоминающего устройства, а также задатчика 26 постоянных сигналов, причем вход функционального преобразователя 18 соединен с выходом канала 11 управления антенной, а выход - с первым входом первого 19 умножителя, второй вход которого соединен с выходом канала 10 оценивания дальности и скорости сближения, а выход с первыми входами первой 20, второй 21, третьей 22 схемы сравнения, вторые входы которых соединены соответственно с первым, вторым и третьим выходом задатчика 26 постоянных сигналов, а четвертый выход которого соединен со вторым входом блока 17 формирования команды на подрыв боевой части ракеты, выходы первой 20, второй 21, третьей 22 схем сравнения соединены соответственно первыми входами первого 23, второго 24 и третьего 25 запоминающего устройства, вторые входы которых соединены с выходом канала 10 оценивания дальности и скорости сближения.
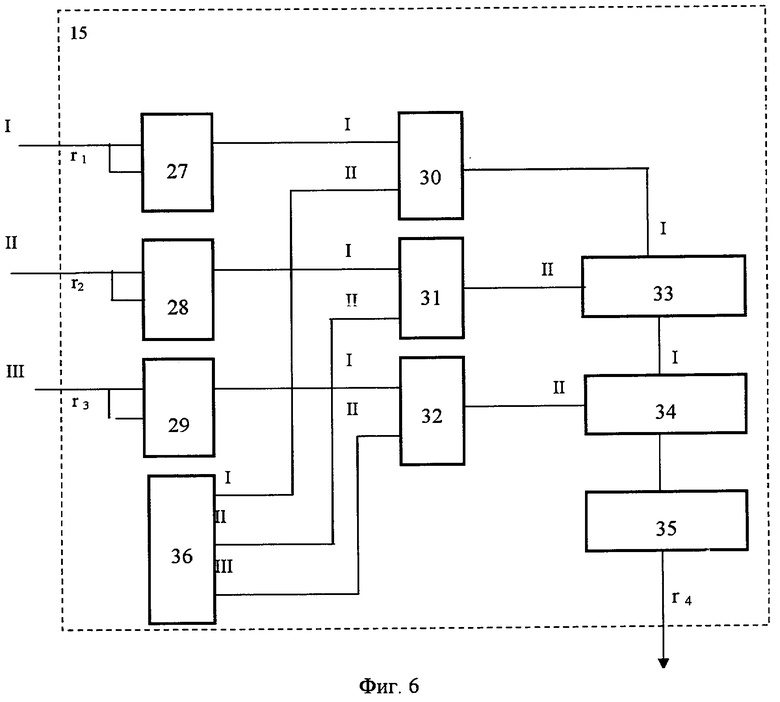
Блок 15 определения промаха ракеты состоит из первого 27, второго 28 и третьего 29 квадратора, второго 30, третьего 31 и 32 умножителей, первого 33 вычитающего и второго 34 суммирующего устройства, второго 35 функционального преобразователя, а также из второго 36 задатчика постоянного сигнала, причем первый, второй, третий выходы блока 14 фиксации текущих параметров движения цели соединены со входом первого 27, второго 28 и третьего 29 квадратора, выходы которых соединены соответственно с первыми входами второго 30, третьего 31 и четвертого 32 умножителей, вторые входы которых соединены с соответственно первым, вторым и третьим выходом второго 36 задатчика постоянных сигналов, выходы второго 30 и третьего 31 умножителей соединены с первым и вторым входами первого 33 вычитающего устройства, выход которого соединен с первым входом второго 34 суммирующего устройства, второй вход которого соединен с выходом четвертого 32 умножителя, а выход второго 34 суммирующего устройства соединен со входом второго 35 функционального преобразователя извлечения квадратного корня, выход которого соединен с первым входом блока 17 формирования команды на подрыв боевой части ракеты.
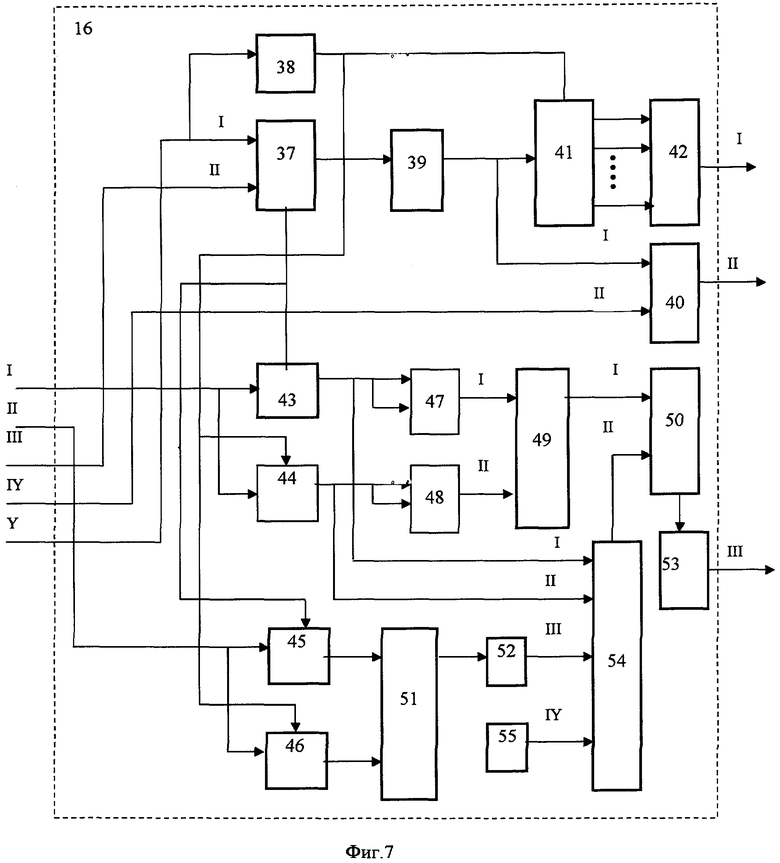
Блок 16 определения геометрических размеров цели состоит из элемента И 37, элемента И-НЕ 38, генератора 39 импульсов, счетчика 40 импульсов и последовательно соединенных сдвигового регистра 41, цифроаналогового преобразователя 42, а также из третьего 43, четвертого 44, пятого 45 и шестого 46 запоминающего устройства, третьего 47 и четвертого 48 квадратора, третьего 49 сумматора, второго 50 и третьего 51 вычитающего устройства, третьего 52 и четвертого 53 функционального преобразователя, пятого 54 умножителя, третьего 55 задатчика постоянных сигналов, причем выход приемника 4 отраженного сигнала соединен с первым входом элемента И 37, и одновременно входом элемента И-НЕ 38, выход блока 14 фиксации текущих параметров движения цели соединен со вторым входом элемента И 37, выход которого соединен одновременно со входом генератора 39 импульсов, первыми входами третьего 43 и пятого 44 запоминающего устройства, вторые входы которых соединены соответственно с выходом канала 10 оценивания дальности и канала 11 управления антенной, выход элемента И-НЕ 38 соединен с первыми входами сдвигового регистра 41, четвертого 45 и шестого 46 запоминающего устройства, выход канала 10 оценивания дальности и скорости сближения соединен с входами третьего 43 и четвертого 44 запоминающего устройства, выходы которых соединены соответственно со входами третьего 47 и четвертого 48 квадратора, выходы которых соединены с первым и вторым входом третьего 49 сумматора, выход которого соединен с первым входом второго 50 вычитающего устройства, выход пятого 45 и шестого 46 запоминающего устройства соединен соответственно с первым и вторым входами третьего 51 вычитающего устройства, выход которого соединен с входом функционального преобразователя 52, выход которого соединен с первым входом пятого умножителя 54, второй и третий вход которого соединен соответственно с выходом третьего 43 и четвертого 44 запоминающих устройств, а выход со вторым входом второго 50 вычитающего устройства, выход которого соединен с входом четвертого 53 функционального преобразователя, выход которого соединен с третьим входом блока 17 формирования команды на подрыв боевой части ракеты, выход генератора 39 импульсов соединен с первым входом счетчика 40 импульсов, а второй вход соединен с шестым выходом блока 14 фиксации текущих параметров движения цели, а выход счетчика 40 является вторым выходом блока 16 определения геометрических размеров цели, первым и третьим выходом которого является соответственно выход цифроаналогового преобразователя 42 и четвертого функционального преобразователя 53.
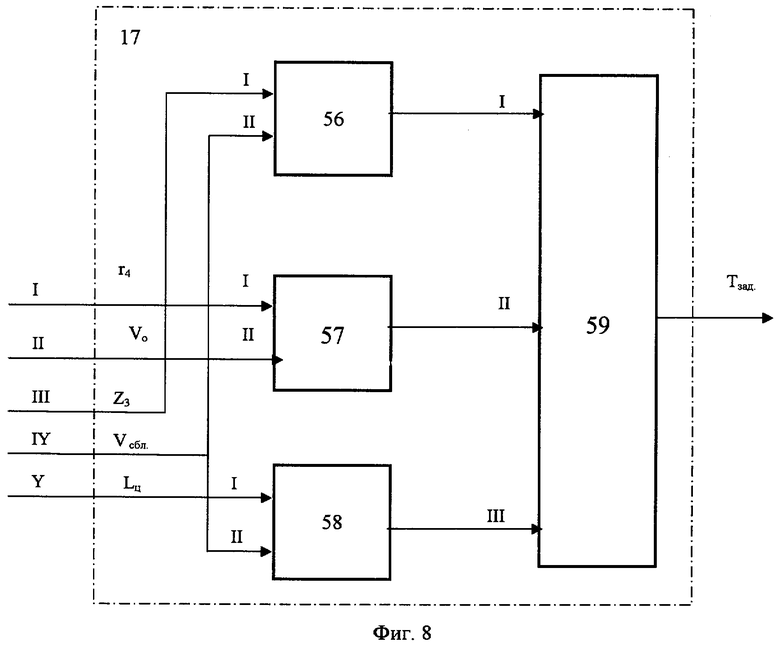
Блок 17 формирования команды на подрыв боевой части ракеты состоит из первого 56, второго 57 и третьего 58 делителя, третьего 59 вычитающего устройства, причем четвертый выход блока 14 фиксации текущих параметров движения цели, выход блока 15 определения промаха и третий выход блока 16 определения геометрических размеров цели соединены с первыми входами первого 56, второго 57 и третьего 58 делителя, выход канала 10 оценивания дальности и скорости сближения соединен одновременно со вторыми входами первого 56 и третьего 58 делителя, пятый выход блока 14 фиксации текущих параметров движения цели соединен со вторым входом второго 57 делителя, выходы первого 56, второго 57 и третьего 58 делителей соединены соответственно с первым, вторым и третьим входами четвертого 59 вычитающего устройства, выход которого является выходом блока 17 формирования команды на подрыв боевой части ракеты.
Устройство работает следующим образом.
Функционирование ИВС ракеты “в-в” осуществляется в следующих режимах: целеуказание, поиск и обнаружение цели при захвате ее на траектории, формирование параметра рассогласования и формирование команды на подрыв боевой части ракеты.
Первые два режима являются подготовительными, а собственно само самонаведение и формирование команды на подрыв боевой части ракеты осуществляется в третьем режиме. В режиме целеуказания (ЦУ) из аппаратуры истребителя в модуль 5 обработки информации поступают команды подготовки ракеты к работе и команды ЦУ (фиг.1). По командам подготовки подаются питающие напряжения в ИВС, настраиваются приемники 2, 4 каналов синхронизации и отраженного сигнала на частоту сигнала подсвета цели (СПЦ) и тестируется работоспособность всей аппаратуры ракеты. По командам ЦУ измерители и вычислители подготавливаются к сопровождению цели, выбранной для поражения. В соответствии с этими командами антенна 3 головки самонаведения разворачивается в направлении на цель, либо в упрежденную точку, в которой будет находится цель в момент взятия ее на автосопровождение. Наличие команд целеуказания по дальности Дцу и скорости сближения Vцу определяется используемыми методом наведения и сигналом подсвета цели.
Если в РГС используется непрерывный СПЦ, то подается команда ЦУ по скорости сближения Vцу (доплеровской частоте), в соответствии с которой будут селектироваться радиосигналы только той цели, скорость сближения с которой соответствует скорости целеуказания. Если в РГС используется импульсный СПЦ, то в модуль 5 обработки поступает команда ЦУ по дальности, в соответствии с которой приемник отраженного сигнала будет отпираться только на время прихода сигналов, отраженных от цели, отстоящей от истребителя на нужную дальность Дцу. При квазинепрерывном СПЦ подаются команды ЦУ и по дальности, и по скорости. Кроме того, команды ЦУ по дальности, скорости сближения и угловым скоростям линии визирования поступают в качестве начальных условий в вычислители, экстраполирующие параметры относительного движения ракеты и цели в автономном режиме работы ИВС, предшествующем захвату цели на траектории, и в случае воздействия на нее радиопомех. Готовность ИВС к работе контролируется по специальным сигналам контроля, поступающим в аппаратуру истребителя по цепям обратной связи (фиг.1).
Необходимо отметить, что в зависимости от вида сигнала подсвета цели (СПЦ) поиск и селекция сигнала, отраженного от перехватываемой цели выполняются по разному.
После совпадения во времени следящих полустробов дальномера и импульса uц, отраженного от цели, поиск прекращается и решается задача обнаружения. В процессе решения этой задачи осуществляется накопление сигналов, имеющее целью повышение вероятности правильного обнаружения. Кроме того, обнаруженный сигнал анализируется на его принадлежность к цели, либо постановщику помех. Анализ выполняется по энергетическому признаку, так как прямой сигнал активной помехи во много раз превышает сигнал, отраженный от цели.
Если в процессе анализа принимается решение о принадлежности обнаруженного сигнала постановщику помех, то либо включаются средства помехозащиты, либо продолжают использовать результаты измерений и экстраполяции автономных датчиков, либо происходит перенацеливание ракеты на постановщик помех. В последнем случае употребляется прямой метод наведения.
Если принимается решение о принадлежности обнаруженного сигнала перехватываемой цели, то измерители ИВС переходят в режим автоматического сопровождения цели по дальности и направлению, а ИВС переводится в режим формирования параметра рассогласования (самонаведения) и формирования команды на подрыв боевой части ракеты.
В этом режиме в дальномерном канале 10 формируются оценки  и
и  а в угломерном канале 11 оценки углов
а в угломерном канале 11 оценки углов  и приращений угловых скоростей
и приращений угловых скоростей  . Оценки
. Оценки  и
и  , 2, а также рассчитываемые вычислителем автономной системы (АС) оценки
, 2, а также рассчитываемые вычислителем автономной системы (АС) оценки  используются для формирования параметра рассогласования
используются для формирования параметра рассогласования  а оценки
а оценки  - для вычисления параметров рассогласования
- для вычисления параметров рассогласования  при методе наведения с постоянным углом упреждения.
при методе наведения с постоянным углом упреждения.
Если ракета наводится по алгоритму в виде выражения:
 в горизонтальной плоскости и
в горизонтальной плоскости и
 в вертикальной, то в угломерном канале еще формируются оценки
в вертикальной, то в угломерном канале еще формируются оценки  поперечных ускорений цели. Знание оценки Д позволяет селектировать по дальности импульсы, отраженные от перехватываемой цели, путем отпирания приемника 4 отраженных сигналов только на время их прихода. Эта особенность позволяет повысить помехозащищенность ИВС в целом.
поперечных ускорений цели. Знание оценки Д позволяет селектировать по дальности импульсы, отраженные от перехватываемой цели, путем отпирания приемника 4 отраженных сигналов только на время их прихода. Эта особенность позволяет повысить помехозащищенность ИВС в целом.
Начало отсчета для оценивания дальности задают импульсы СПЦ, поступающие в приемник 2 сигналов синхронизации через антенну 1.
По пространству (направлению) цель селектируется за счет направленных свойств антенны 3 путем ее поворота в направлении, определяемом оценками углов  .
.
При непрерывном СПЦ для селекции сигналов, отраженных от цели, используется доплеровская частота Fрц, пропорциональная скорости сближения ракеты с целью. В полуактивной РГС частота Fрц выделяется как разность частот двух сигналов. Один из них, отраженный от цели, принятый антенной 3 Аос и усиленный в приемнике 4 отраженных сигналов, содержит доплеровское смещение частоты, обусловленное скоростью сближения истребителя с целью и цели с ракетой. Второй сигнал uc' принятый антенной 1 и усиленной приемником 2, содержит доплеровское смещение частоты, вызываемое скоростью удаления ракеты от истребителя. После вычитания частот сигналов, поступающих в приемники 4, 2 отраженных и синхронизирующих сигналов, формируется сигнал, поиск и селекция которого выполняется в модуле 5 обработки. При дальности Дп≤Дз поиск этого сигнала осуществляется относительно частоты Fцу=2Vцу/λ , которая устанавливается командой целеуказания Vцу по скорости, измеренной в БРЛС истребителя. Если Дп>Дз поиск производится относительно частоты 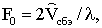 где
где  - оценка скорости, экстраполированной в автономной системе наведения ракеты. Поиск осуществляется путем изменения по линейному закону частоты специального гетеродина. При некотором значении этой частоты сигнал промежуточной частоты приемника отраженных сигналов (ПРМОС) попадает в узкополосный фильтр, после чего поиск прекращается и начинается этап обнаружения и анализа.
- оценка скорости, экстраполированной в автономной системе наведения ракеты. Поиск осуществляется путем изменения по линейному закону частоты специального гетеродина. При некотором значении этой частоты сигнал промежуточной частоты приемника отраженных сигналов (ПРМОС) попадает в узкополосный фильтр, после чего поиск прекращается и начинается этап обнаружения и анализа.
Селектируемый сигнал анализируется на его принадлежность не только цели, или постановщику помех, но и земле. Этим самым исключается захват и сопровождение сигнала, отраженного от земли, вместо сигнала, отраженного от низколетящей цели. Анализ проводится по энергетическим и частотным различиям сигналов излучаемых постановщиком помех и отраженных от земли либо от цели.
Принятие решения о принадлежности обнаруженного сигнала к постановщику помех приводит к тому же, что и при использовании импульсных сигналов, а именно если принимается решение, что обнаруженный сигнал принадлежит земле, то выдается команда на возобновление поиска сигнала цели по частоте. При принятии решения о принадлежности анализируемого сигнала к перехватываемой цели измерители РГС переходят к его автоматическому сопровождению по доплеровской частоте, выполняемому автоселектором скорости (каналом 10 оценивания Vсб), и по направлению, осуществляемому угломером, а РГС переводится в режим самонаведения.
Оценка, формируемая автоселектором скорости на основе измерения доплеровской частоты Fрц, поступает в вычислитель 6 параметров рассогласования для реализации методов наведения. Угломерный канал 11 при непрерывном СПЦ функционирует так же, как и при импульсном сигнале с НЧП.
При использовании квазинепрерывного сигнала поиск и селекция цели производится как по дальности, так и по доплеровской частоте. В процессе обнаружения цели имеет место такой же анализ сигнала на его принадлежность к постановщику помех, земле либо цели, что и при использовании непрерывного СПЦ. После перехода к автоматическому сопровождению цели по дальности, скорости и направлению устройства оценивания Д и Vcб формируют оценки дальности  и скорости
и скорости  . При этом Д оценивается по времени запаздывания отраженного сигнала, а скорость по частоте Fрц. Наличие информации о дальности позволяет повысить помехозащищенность РЭСУ за счет отпирания приемника только на время прихода сигналов, отраженных от цели.
. При этом Д оценивается по времени запаздывания отраженного сигнала, а скорость по частоте Fрц. Наличие информации о дальности позволяет повысить помехозащищенность РЭСУ за счет отпирания приемника только на время прихода сигналов, отраженных от цели.
При квазинепрерывном СПЦ необходимо устранять неоднозначность отсчета дальности, поскольку время запаздывания отраженного сигнала может превышать период повторения импульсов СПЦ. Если невозможно обеспечить однозначность отсчета, дальность не оценивается и слежение по ней не реализуется. В такой ситуации отраженный сигнал селектируется не по дальности, а по периоду повторения, что позволяет также обеспечить стробирование приемника на время прихода отраженных импульсов. Целесообразность такого приема обусловлена тем, что при вычислении параметров рассогласования не требуется знания текущей дальности. Принцип работы угломерного канала 11 остается тем же, что и при использовании СПЦ других типов.
Входящие в систему 7 автономных датчиков измерители параметров собственного движения (см. фиг.1), к которым относятся прежде всего акселерометры и гироскопы, выдают информацию об ускорениях jx и j1,2 и углах тангажа  и рысканья ψ . На основе измерения jx и j1,2 в вычислители автономной системы формируются оценки
и рысканья ψ . На основе измерения jx и j1,2 в вычислители автономной системы формируются оценки  и
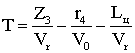
и  , используемые при вычисления параметров рассогласования. Гироскопические датчики позволяют развязать антенну 3 РГС от угловых колебаний ракеты, что повышает точность и устойчивость сопровождения целей по направлению. Обработка исходной информации о дальности и угловом положении цели в вычислителе 13 позволяет получить дополнительную информацию о скорости и промахе ракеты относительно геометрического центра цели, а также о ее геометрических размерах. Рассмотрим схему сближения ракеты с целью (фиг.2).
, используемые при вычисления параметров рассогласования. Гироскопические датчики позволяют развязать антенну 3 РГС от угловых колебаний ракеты, что повышает точность и устойчивость сопровождения целей по направлению. Обработка исходной информации о дальности и угловом положении цели в вычислителе 13 позволяет получить дополнительную информацию о скорости и промахе ракеты относительно геометрического центра цели, а также о ее геометрических размерах. Рассмотрим схему сближения ракеты с целью (фиг.2).
Согласно фиг.2 координаты цели относительно оси Z, обозначены дискретными значениями Z1, Z2, Z3, текущие значения дальности, соответствующие моменту прохода целью трех фиксированных точек - r1, r2, r3 и текущие значения углового положения цели - ϕ 1, ϕ 2, ϕ 3.
Геометрические размеры цели определяются путем измерения дальности до цели и углового положения начальной и конечной точек на теле цели.
Скорость сближения ракеты с целью определяется на основе фиксации временного интервала при проходе целью двух заданных расстояний.
Промах ракеты относительно цели определяется на основе фиксации текущих значений дальности и углового положения при проходе целью трех заданных расстояний.
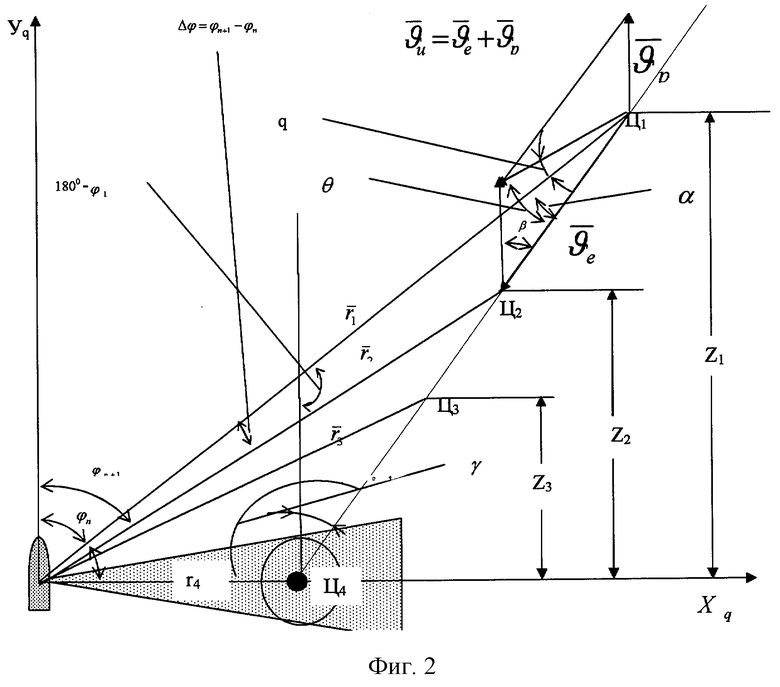
Трехмерный график, поясняющий алгоритм определения промаха ракеты относительно цели, приведен на фиг.3
Согласно фиг.3 расположение ракеты (М) и цели (Т) в некоторый момент времени t будет:
где Vм, Vt - скорость ракеты и цели соответственно.
Тогда расстояние г до цели может быть рассчитано по формуле:
 или
или
где 
Тогда  где
где 

Для частного случая α , β , γ постоянны. Для трех различных моментов времени:
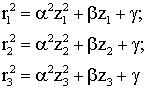
и 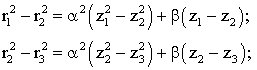
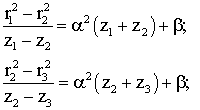
Определив r4 как предел, при котором z=z4=0, получим:
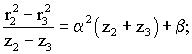
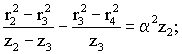
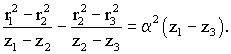
Тогда, произведя преобразования, получим:

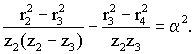
Промах ракеты относительно цели можно представить в виде выражения:

где
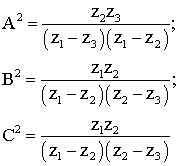 - постоянные коэффициенты.
- постоянные коэффициенты.
Информация о текущих значениях дальности и углового положения цели поступает на первый и второй входы блока 14 фиксации текущих значений параметров движения цели (фиг.4). Данные сигналы через функциональный преобразователь 18, первый умножитель 19 поступают на первые входы первой 20, второй 21 и третьей 22 схемы сравнения, на вторые входы которых поступают сигналы с первого задатчика постоянных сигналов 26. При превышении уровня заданных сигналов с выходов схем сравнения сигналы поступают на первые входы первого, второго и третьего запоминающих устройств, на вторые входы которых поступают сигналы, пропорциональные текущей дальности до цели. Таким образом, с выхода первого 23, второго 24 и третьего 25 запоминающих устройств последовательно по времени поступают сигналы, пропорциональные текущим значениям дальностей относительно фиксированных точек пространства относительно цели (фиг.2). Кроме того, с выхода второй 21 и третьей 22 схем сравнения поступает сигнал, фиксирующий момент прохода целью двух фиксированных расстояний Z2 и Z3, а с четвертого выхода задатчика 26 постоянных сигналов - пропорциональный начальной скорости осколков V0.
Блок 15 определения промаха ракеты на основе поступающих сигналов, пропорциональных значению r1, r2, r3, формирует промах ракеты относительно цели (см. фиг.6). Данные сигналы через первый 27, второй 28 и третий 29 квадраторы поступают на первые входы второго 30, третьего 31 и четвертого умножителей, на выходах которых формируются сигналы, пропорциональные соответственно значением А2r1 2, В2r2 2, С2r3 2 Данные сигналы поступают на вход второго функционального преобразователя 35 через первое 33 вычитающее устройство и второй 34 сумматор. На выходе функционального преобразователя 35 формируется сигнал, пропорциональный промаху ракеты, в виде выражения:  , который поступает на первый вход блока формирования команды на срабатывание боевой части ракеты (см. фиг.4).
, который поступает на первый вход блока формирования команды на срабатывание боевой части ракеты (см. фиг.4).
Блок 16 определения геометрических размеров цели формирует сигнал, пропорциональный геометрическим размерам цели. Входными сигналами, обеспечивающими функционирование блока 16 определения геометрических размеров цели являются сигналы о текущей дальности, угловом положении цели, с выхода приемника 4 отраженных сигналов, а также сигналы, определяющие момент прохода целью двух фиксированных расстояний Z2Z3.
В момент прохода целью второго фиксированного расстояния сигнал с пятого выхода блока 14 фиксации текущих параметров движения цели Z2 поступает на второй вход элемента И 37, на первый вход которого поступает сигнал с выхода приемника 4 отраженных сигналов, при наличии данных сигналов с выхода элемента сигнал поступает на генератор 39 импульсов. С выхода генератора импульсов через сдвиговый регистр 41 и ЦАП 42 сигнал управления антенной поступает на первый вход усилителя 8 мощности и привода антенны. При этом происходит сканирование пространства в заданном диапазоне (за счет срабатывания ключа 12 происходит отключение усилителя 8 мощности и привода антенны от канала 11 управления антенной).
Момент появления отраженного сигнала от цели фиксирует начальное положение дальности и углового положения цели за счет срабатывания третьего 43 и пятого 45 запоминающих устройств на основе появления сигнала со второго выхода элемента И 37. Момент пропадания сигнала с выхода приемника 4 отраженных сигналов фиксирует конечное положение дальности и углового положения цели за счет срабатывания четвертого 44 и шестого 46 запоминающих устройств при поступления сигнала с выхода элемента И-НЕ 38.
Затем данные сигналы поступают через третий 47 и четвертый квадратор, третий 49 сумматор, второе 50 вычитающее устройство, а также через третье 51 вычитающее устройство, третий 52 функциональный преобразователь, пятый 54 умножитель на четвертый 53 функциональный преобразователь, который формирует сигнал в соответствии с выражением

Блок 17 формирования команды на подрыв боевой части ракеты осуществляет формирование сигнала на подрыв боевой части ракеты в соответствии с конкретными условиями подхода ракеты к цели и ее геометрическими размерами. Входной информацией, необходимой для функционирования данного блока, является информация о моменте прохода целью третьего фиксированного расстояния, о скорости сближении, промахе ракеты относительно цели, начальной скорости осколков, геометрических размеров цели.
Данная информация через первый 56, второй 57 и третий 58 делители поступает на вход четвертого 59 вычитающего устройства, с выхода которого в виде выражения:
С выхода блока формирования команды на подрыв сигнал в соответствии с условиями подхода и геометрическими размерами цели поступает на подрыв боевой части ракеты.
Таким образом дополнительно с наведением ракеты осуществляется формирование команды на подрыв боевой части ракеты.
Источники информации
1. Меркулов В.И., Лепин В.Н. Авиационные системы радиоуправления. М.: Радио и связь, 1997 г., - c.201 (прототип).
Группа изобретений относится к авиационным управляемым ракетам. Сущность способа заключается в том, что на основе исходной информации об угловом положении и дальности до цели, в непосредственной близости от нее определяют скорость сближения ракеты, геометрические размеры цели, промах ракеты и формируют команду на подрыв боевой части ракеты на основе данной информации, с учетом начальной скорости разлета осколков боевой части ракеты. Способ реализуется посредством устройства, имеющего в своем составе ключ и вычислитель формирования команды на подрыв боевой части ракеты, первый, второй входы которого соединены соответственно с первым и вторым выходами модуля обработки информации, третий вход с выходом приемника отраженного сигнала, первый выход соединен со вторым входом ключа, первый вход которого соединен со вторым выходом канала управления антенной, а выход ключа соединен с первым входом усилителя мощности и привода антенны, второй вход которого соединен со вторым выходом вычислителя формирования команды на подрыв боевой части ракеты, третий выход которого является выходом команды на подрыв боевой части ракеты. Реализация изобретений позволяет повысить функциональные возможности наведения за счет информационного обеспечения функционирования боевого снаряжения. 2 н. и 9 з.п. ф-лы, 8 ил.
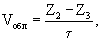
где Z2, Z3 - второе и третье фиксированные расстояния до цели, τ - временной интервал пропорциональной скорости движения цели при проходе данных фиксированных расстояний.

где D1, D2 - угловое положение начальной и соответственно конечной точек на теле цели;
Δϕ=ϕн-ϕк - угловой размер цели.

где А, В, С - постоянные коэффициенты;
r1, r2, r3 - текущие расстояния, фиксируемые при проходе целью трех заданных расстояний.
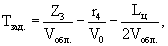
где V0 - начальная скорость разлета осколков.
| МЕРКУЛОВ В | |||
| И., ЛЕПИН В | |||
| Н | |||
| Авиационные системы радиоуправления | |||
| - М.: Радио и связь, 1997, с | |||
| Питательное приспособление к трепальным машинам для лубовых растений | 1922 |
|
SU201A1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2002 |
|
RU2213318C1 |
| СПОСОБ ПОРАЖЕНИЯ НАЗЕМНЫХ И ВОЗДУШНЫХ ЦЕЛЕЙ И УСТРОЙСТВО (БОЕПРИПАС) ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2158408C1 |
| Устройство окулярной части перископа с переключателем квазибинокулярного режима в режим монокуляра и обратно | 2024 |
|
RU2830078C1 |
| DE 10158666 A1, 18.06.2003 | |||
| DE 19950669 A1, 26.04.2001 | |||
| JP 2003084062 A, 19.03.2003. | |||

