Изобретение относится к области авиационных управляемых ракет и может использоваться для решения задачи наведения ракеты на воздушную цель и для информационного обеспечения функционирования боевого снаряжения АУР.
Известен способ функционирования информационно-вычислительной системы (ИВС) ракеты при наведении на цель, заключающийся в измерении параметров движения цели и собственного движения ракеты, формирование необходимых параметров относительного и абсолютного движения, неподдающихся непосредственному измерению, на основе использования априорных сведений, выборе метода наведения ракеты на цель, наилучший по какому-либо критерию для данных условий применения, анализе помеховой обстановки и включении в зависимости от обстановки средств помехозащиты, нерадиотехнических измерителей, перенацеливание ракеты на постановщик помех, формирование сигнала подготовки и управления для радиовзрывателя (Меркулов, В.Н.Лепин. Авиационные системы радиоуправления. - Москва: Радио и связь, 1997 г. - с.201).
Известно устройство, в состав которого входит последовательно соединенный приемник сигнала синхронизации, приемник отраженного сигнала, а также система автономных датчиков и модуль обработки информации, вычислитель и усилитель мощности, причем выход приемника синхронизации соединен с первым входом модуля обработки информации, выход приемника отраженного сигнала со вторым входом модуля обработки информации, первый и второй выходы системы датчиков соответственно с третьим и четвертым входами модуля обработки информации, пятый вход которого соединен с усилителем мощности и приводом антенны, которая имеет механическую связь с антенной, первый, второй, третий и четвертый выходы которых соединены соответственно с шиной сигнала контроля и обратной связи в аппаратуру истребителя, на первый и второй вход вычислителя параметров рассогласования, на вход усилителя мощности и привода антенны, выход которого имеет механическую связь с антенной (Меркулов, В.Н.Лепин. Авиационные системы радиоуправления. - Москва: Радио и связь, 1997 г. - с.201).
Недостатком данных способа и устройства является слабое информационное обеспечение функционирования боевого снаряжения АУР в связи с отсутствием возможности получения дополнительной информации о воздушной цели и параметрах ее движения на борту ракеты.
Технической задачей изобретения является повышения эффективности боевого применения АУР за счет использования дополнительной информации о воздушной цели и параметрах ее движения в интересах боевого снаряжения АУР класса «в-в».
Решение технической задачи достигается тем, что в способе функционирования информационно-вычислительной системы ракеты при наведении на цель, заключающемся в измерении параметров движения цели и собственного движения ракеты, формировании необходимых параметров относительного и абсолютного движения, не поддающихся непосредственному измерению, на основе использования априорных сведений, выборе метода наведения ракеты на цель, наилучшего по какому-либо критерию для данных условий применения, анализе помеховой обстановки и включении, в зависимости от обстановки, средств помехозащиты и нерадиотехнических измерителей, перенацеливании ракеты на постановщик помех, формировании сигнала подготовки и управления для радиовзрывателя, дополнительно определяют три дискретных значения углового положения цели и два базовых расстояния, проходимых ракетой при постоянной скорости ее полета между первой, второй и третьей засечкой, одно значение углового положения цели при осуществлении четвертой засечки и базовое расстояние, проходимое ракетой при снижении ее скорости полета между третьей и четвертой засечкой, определяют дальность, скорость сближения ракеты с целью на основе данной информации, определяют промах ракеты и ракурс цели на основе использования информации о текущих значениях дальности и угловом положения цели в трех опорных точках относительно ракеты, определяют геометрические размеры цели путем сканирования цели относительно второй опорной точки относительно ракеты и формируют команду на подрыв боевой части ракеты относительно третьей опорной точки ракеты с учетом полученной информации о воздушной цели и условиях подхода ракеты к ней.
Текущую дальность до цели определяют в виде выражения:
где Дn - дальность до цели в n-угловом положении, βn - значения углового положения цели определяющего положения цели при n-измерении, Ln+1 - расстояние, проходимое целью между n и n+1 измерении, βn+1 - значения углового положения цели при n+1 измерении, ε - угол наклона траектории движения цели.
Дальность до цели в четвертом угловом положении определяют в виде выражения:
где Д11 - дальность до цели при нахождении ее на линии визирования в момент измерения первого углового положения. β1 - угол, определяющий положение линии визирования в первый момент измерения; Б - базовое расстояние, проходимое ракетой между первым и вторым измерением, Б3 - базовое расстояние, проходимое ракетой после третьего измерения; β4 - угол, определяющий положение линии визирования в четвертый момент измерения, ε - угол наклона траектории движения цели.
Дальность до цели, находящейся в первом угловом положении, определяют в виде выражения:

где β2β3 - угловое положение цели во второй и третий момент измерения. Угол наклона траектории движения цели определяют в виде выражения:
ε=arctg x3/x2,
где x3, x2 - проекции траектории движения цели на ось ox1, oy1 системы координат OY1X1, связанной с ракетой.
Проекции траектории движения цели определяют в виде выражения:


Скорость сближения ракеты с целью определяют в виде выражения:

где Δt - временной интервал между измерениями.
Величину промаха ракеты определяют путем определения текущих значений дальности в опорных точках относительно ракеты в виде:
 ;
;
где А, В, С - постоянные коэффициенты, r1, r2, r3 - текущие расстояния, фиксируемые при проходе целью трех заданных расстояний
Ракурс цели определяют в виде выражения:
 ,
,
где Vr, Vц - модули скорости ракеты и цели, β - угол между составляющими вектора цели, Δϕ - угловой размер между двумя фиксированными точками относительно ракеты, rn, rn+1 - текущие значения дальности до цели.
Линейный размер протяженной цели определяют в момент прохода ею второй опорной точки относительно ракеты путем сканирования цели и фиксации угловых положений до начальной и конечной точки на протяженной цели соответственно в момент появления и пропадания отраженного сигнала от цели в виде выражения:

где Vп - скорость полета ракеты; tск - время сканирования цели, Т - время между окончанием первого сканирования и началом второго сканирования,  - угловые положения конечных точек на теле цели в первый и второй цикл измерений.
- угловые положения конечных точек на теле цели в первый и второй цикл измерений.
Команду на подрыв боевой части ракеты формируют на основе анализа значений ракурса цели и скорости сближения ракеты с целью в виде следующих алгоритмов:
- если ракурс цели q>qп, то в виде: 
где V0 - начальная скорость разлета осколков; Z3 - третье фиксированное расстояние до цели, Vсбл - скорость сближения с целью, qп - пороговое значение ракурса цели.
- если q<qп и Vсбл<Vп, то в виде: 
- если q<qп и Vсбл>Vп, то в виде: 
В устройство для реализации способа функционирования информационно-вычислительной системы ракеты при наведении на цель, содержащее последовательно соединенные антенну, приемник, модуль обработки сигнала и вычислитель параметров рассогласования, а также усилитель мощности и привод антенны, систему автономных датчиков, модуль обработки информации, состоящее из селектора цели и обнаружителя, канала управления антенной, где его первый, второй входы модуля обработки информации соединены соответственно с выходом приемника, с аппаратурой истребителя и вторым входом вычислителя параметров рассогласования, первый, второй выходы модуля обработки информации соединены соответственно с входом аппаратуры истребителя с третьим входом вычислителя параметров рассогласования, дополнительно введены первый ключ и вычислитель формирования команды на подрыв боевой части ракеты, причем первый, второй, третий выходы вычислителя формирования команды на подрыв боевой части ракеты соединены соответственно со вторым входом первого ключа, вторым входом усилителя мощности и привода антенны и боевой частью авиационной управляемой ракеты, третий выход модуля обработки информации соединен с первым входом первого ключа, выход которого соединен с первым входом усилителя мощности и привода антенны, первый и второй выходы которого механически связаны с антенной и входом вычислителя формирования команды на подрыв боевой части ракеты.
Кроме того, вычислитель формирования команды на подрыв боевой части ракеты состоит из блока фиксации текущих параметров движения цели и ракеты, блока определения дальности до цели, блока определения промаха ракеты, блока определения ракурса цели, блока определения скорости движения цели, последовательно соединенных блока управления антенной и блока определения геометрических размеров цели, блока формирования команды на подрыв боевой части ракеты, причем первым, вторым и третьим входом вычислителя формирования команды на подрыв боевой части ракеты являются соответственно первые входы блока фиксации текущих параметров движения цели и ракеты и одновременно блока определения дальности и блока управления антенной, вторым входом блока фиксации текущих параметров цели и ракеты и третьим входом блока управления антенной, первый, второй, третий, четвертый, пятый, шестой и седьмой выходы блока фиксации текущих параметров цели и ракеты соединены соответственно со вторым, третьим, четвертым, пятым, шестым, седьмым и восьмым входами блока определения дальности и одновременно соответственно с первым, вторым, третьим и четвертым входами блока определения скорости сближения, первый и второй выход блока определения дальности соединен соответственно с входами блока определения промаха и одновременно блока определения ракурса и первым входом блока формирования команды на подрыв боевой части ракеты, пятым входом блока определения скорости, первым входом блока определения геометрических размеров цели, первый выход блока определения промаха, выходы блока определения ракурса цели, блока определения скорости сближения ракеты с целью, блока определения геометрических размеров цели, соединены соответственно с третьим, четвертым, вторыми, пятым и шестым входами блока формирования команды на подрыв боевой части ракеты, первым, вторым и третьим выходами вычислителя формирования команды на подрыв боевой части ракеты являются соответственно второй выход блока определения промаха, пятый выход блока управления антенной и выход блока формирования команды на подрыв боевой части ракеты.
Кроме того, блок фиксации текущих параметров движения цели и ракеты состоит из второго, третьего, четвертого, пятого, шестого, седьмого, восьмого и девятого ключей, последовательно соединенных генератора импульсов и сдвигового регистра, последовательно соединенных первого и второго интегратора, причем первый и второй блок фиксации текущих параметров движения цели и ракеты являются соответственно первыми входами третьего, четвертого, пятого и девятого ключей, первый, второй, третий и четвертые выходы сдвигового регистра соединены соответственно со вторыми входами второго и девятого ключей, третьего и шестого, четвертого и седьмого, пятого и восьмого ключей, выход второго интегратора соединен с первыми входами шестого, седьмого и восьмого ключей, первым, вторым, третьим, четвертым, пятым, шестым, седьмым и восьмым выходом блока фиксации текущих параметров движения цели и ракеты являются соответственно выходы второго, третьего, четвертого, пятого, шестого, седьмого, восьмого ключей и выход первого интегратора.
Кроме того, блок определения дальности до цели состоит из блока определения дальности до цели в первом фиксированном угловом положении, блока определения дальности до цели в четвертом фиксированном угловом положении, блока определения текущей дальности до цели, блока определения угла наклона траектории движения цели, причем первый, второй, третий, четвертый, пятый, шестой и седьмой входы блока определения дальности являются соответственно первыми, вторыми, третьими, четвертыми, пятыми, шестыми и седьмыми входами блока определения дальности в первом фиксированном угловом положении и одновременно первыми, вторыми, третьими, четвертыми, пятыми, шестыми входами блока определения угла наклона траектории движении цели, выход блока определения дальности в первом фиксированном угловом положении и первый и второй выход блока определения угла наклона траектории движении цели соединены соответственно со вторым и третьим входами блока определения текущей дальности, первый вход которого соединен с выходом блока определения дальности до цели в четвертом фиксированном положении, а выход является выходом блока определения дальности.
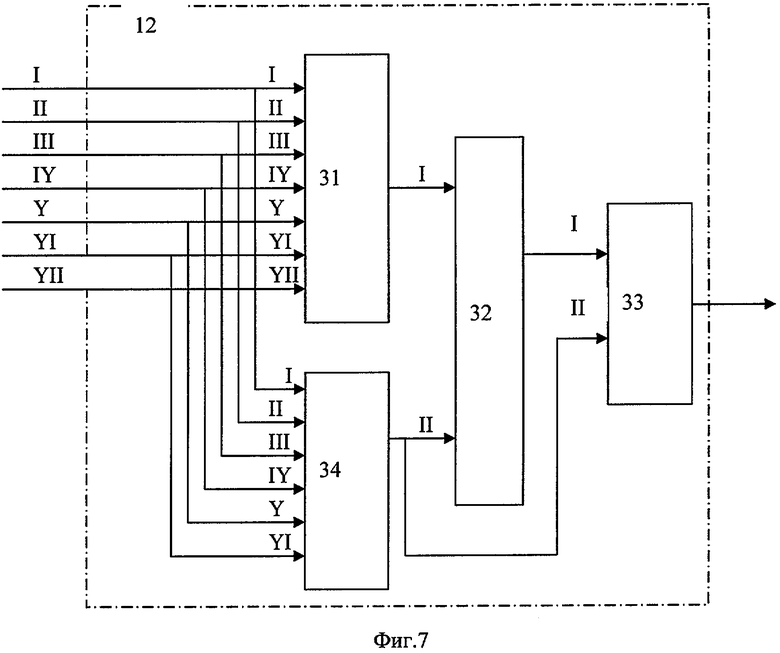
Кроме того, блок определения промаха ракеты состоит из первого, второго функционального преобразователя, первого, второго, третьего, четвертого умножителя, первого, второго, третьего сравнивающего устройства, первого, второго, третьего запоминающего устройства, первого, второго и третьего квадратора, вычитающего устройства, суммирующего устройства, первого задатчика постоянных сигналов, причем первый, второй входы блока определения промаха ракеты являются соответственно входом первого функционального преобразователя, первым входом первого умножителя и одновременно вторыми входами первого, второго, третьего запоминающих устройств, выход первого функционального преобразователя соединен со вторым входом первого умножителя, выход первого умножителя соединен с первыми входами первого, второго и третьего сравнивающих устройств, первый, второй, третий, четвертый, пятый, шестой выходы задатчика постоянных сигналов соединены со вторыми входами соответственно первого, второго, третьего сравнивающих устройств, второго, третьего, четвертого умножителей, выходы первого, второго, третьего сравнивающих устройств соединены с первыми входами соответственно первого, второго, третьего запоминающих устройств, выходы которых соединены с входами соответственно первого, второго, третьего квадраторов, выходы которых соединены соответственно с первыми входами второго, третьего, четвертого умножителей, выходы которых соединены соответственно с первым и вторым входами вычитающего устройства, вторым входом суммирующего устройства, первый вход которого соединен с выходом вычитающего устройства, а выход со входом второго функционального преобразователя, первым, вторым, третьим, четвертым выходом блока определения промаха ракеты является соответственно седьмой выход задатчика постоянных сигналов, выходы второго, третьего сравнивающих устройств, выход второго функционального преобразователя.
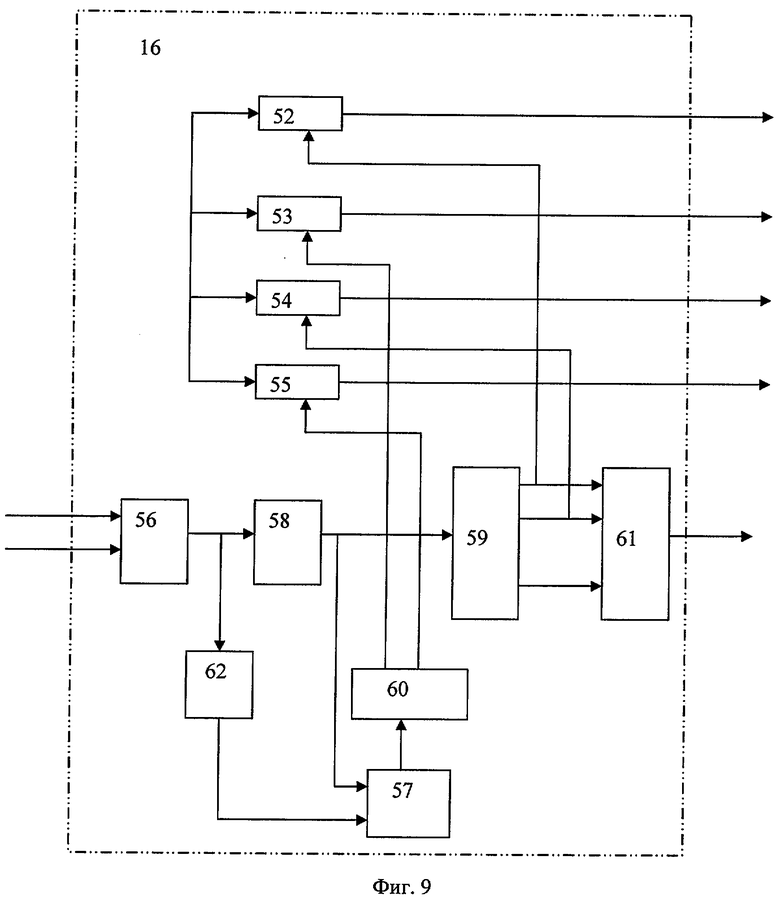
Кроме того, блок управления антенной состоит из девятого, десятого, одиннадцатого, двенадцатого ключей, первого и второго элемента И, второго генератора импульсов, второго и третьего сдвигового регистра, цифроаналогового преобразователя, элемента И-НЕ, причем первый, второй, третий входы блока управления антенной являются соответственно первыми входами девятого, десятого, одиннадцатого и двенадцатого ключей, первыми и вторыми входами первого элемента И, выход которого соединен со входами элемента И-НЕ и второго генератора импульсов, выходы которых соединены соответственно со вторым и первым входом второго элемента И, выход которого соединен со входом третьего сдвигового регистра, кроме того выход генератора импульсов соединен со входом второго сдвигового регистра, первый и второй выход которого соединен соответственно со вторыми входами девятого и одиннадцатого ключей и первым и вторым входом цифроаналогового преобразователя, n-вход которого соединен с n-выходом второго сдвигового регистра, первый и второй выход третьего сдвигового регистра соединен соответственно со вторыми входами десятого и двенадцатого ключей, первыми, вторыми, третьими, четвертыми и пятыми выходами блока управления антенной являются соответственно выходы девятого, десятого, одиннадцатого, двенадцатого ключей и цифроаналогового преобразователя.
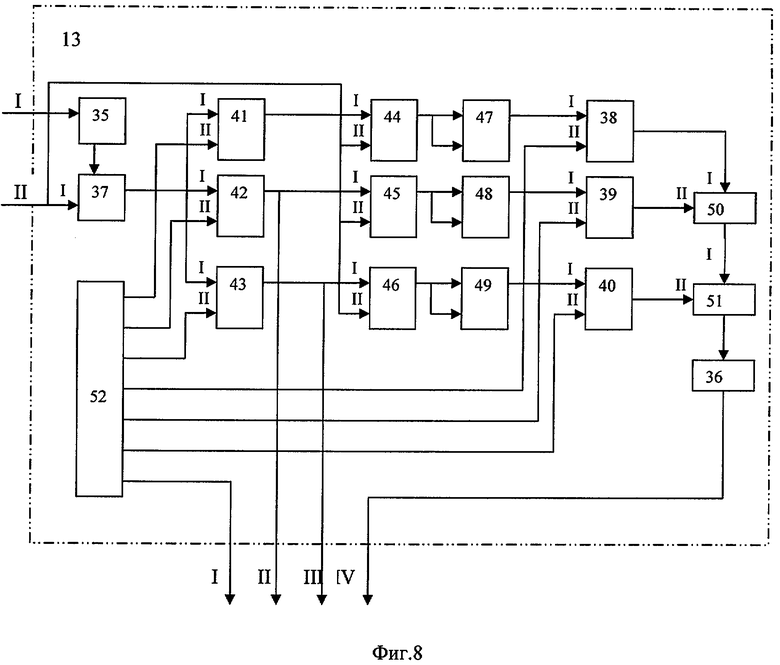
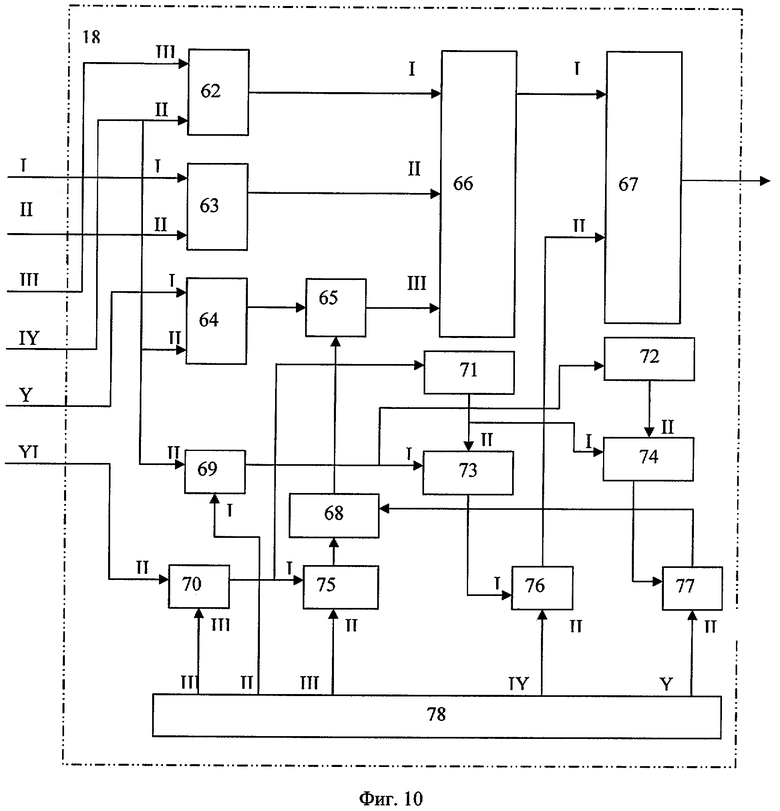
Кроме того, блок формирования команды на подрыв боевой части ракеты состоит из первого, второго и третьего делителей, пятого умножителя, второго вычитающего устройства, второго и третьего суммирующих устройств, четвертого и пятого сравнивающих устройств, второго и третьего элементов И-НЕ, третьего и четвертого элементов И, двенадцатого, тринадцатого и четырнадцатого ключей, второго задатчика постоянных сигналов, причем первый, второй, третий, четвертый, пятый и шестой входы блока формирования команды на подрыв боевой части ракеты являются соответственно первыми и вторыми входами второго, первого делителей, первым входом третьего делителя, входом пятого сравнивающего устройства, кроме того второй вход первого делителя соединен со вторым входом третьего делителя и со вторым входом четвертого сравнивающего устройства, выходы первого, второго и третьего делителей соединены соответственно с первым, вторым входами второго вычитающего устройства и первым входом пятого умножителя, выход которого соединен с третьим входом второго вычитающего устройства, первый, второй, третий, четвертый, пятый выходы второго задатчика постоянных сигналов соединены соответственно с первыми входами пятого и четвертого сравнивающих устройств, вторыми входами двенадцатого, тринадцатого и четырнадцатого ключей, выходы четвертого и пятого сравнивающих устройств соединены соответственно с первыми входами третьих элементов И, И-НЕ, двенадцатого ключа и второго элемента И-НЕ, выход которого соединен со вторым входом второго элемента И, первым входом третьего элемента И, выходы которых соответственно соединены с первыми входами тринадцатого и четырнадцатого ключей, выходы которых соединены соответственно со вторым входом второго суммирующего устройства и вторым входом третьего суммирующего устройства, первый вход которого соединен с выходом двенадцатого ключа, а выход со вторым входом пятого умножителя, выход которого соединен с третьим входом второго вычитающего устройства, выход которого соединен с первым входом второго суммирующего устройства, выход которого является выходом блока формирования команды на подрыв боевой части ракеты.
Сопоставительный анализ с прототипом показывает, что заявляемые способ и устройство отличаются наличием новых действий и новых элементов схемы и новых связей, обеспечивающих технический результат изобретения, что позволяет сделать вывод о наличии в данном техническом решении критерия патентоспособности «новизна», а именно в способе:
- определяют текущую дальность до цели, на основе дискретных значений углового положения цели и базовых расстояний, проходимых ракетой между этими измерениями;
- определяют скорость сближения ракеты с целью на основе учета скорости сближения ракеты с целью и угловых положений крайних точек на теле цели;
- определяют геометрические размеры цели;
- определяют промах ракеты относительно цели;
- определяют ракурс цели;
- формируют команду на подрыв боевой части ракеты на основе данной информации;
а в устройство введены первый ключ и вычислитель формирования команды на подрыв боевой части ракеты.
Сравнение заявляемого решения с другими техническими решениями, показывает, что оно явным образом не следует из уровня техники, в заявляемых способе и устройстве расширены функциональные возможности за счет управления моментом срабатывания боевой части АУР в соответствии с конкретными условиями подхода ракеты к цели.
Это позволяет сделать вывод о соответствии заявляемого изобретения критерию «существенные отличия».
На фиг.1 приведена структурная схема информационно-вычислительной системы ракеты при наведении на цель; на фиг.2, 3 - схемы сближения ракеты с целью; на фиг.4 - векторная схема определения геометрических размеров цели; на фиг.5 - структурная схема вычислителя формирования на подрыв боевой части ракеты; на фиг.6 - блок фиксации текущих параметров движения цели; на фиг.7 - блок определения промаха; на фиг.8 - блок определения геометрических размеров цели; на фиг.9 - блок определения ракурса цели; на фиг.10 - блок формирования команды на подрыв боевой части ракеты.
Устройство функционирования информационно-вычислительной системы ракеты при наведении на цель, содержащее последовательно соединенные антенну 1, приемник 2, модуль 3 обработки сигнала и вычислитель 4 параметров рассогласования, а также систему 5 автономных датчиков, усилитель 6 мощности и привод антенны, модуль 3 обработки информации состоит из селектора 7 цели и обнаружителя, канала 8 управления антенной, первый ключ 9 и вычислитель 10 формирования команды на подрыв боевой части ракеты, причем первый, второй вход модуля 3 обработки информации соединены соответственно с выходом приемника 2, с аппаратурой истребителя и вторым входом вычислителя 4 параметров рассогласования, первый, второй выходы модуля 3 обработки информации соединены соответственно с входом аппаратуры истребителя с третьим входом вычислителя 4 параметров рассогласования, первый, второй, третий выходы вычислителя 10 формирования команды на подрыв боевой части ракеты соединены соответственно со вторым входом первого 9 ключа, вторым входом усилителя 6 мощности и привода антенны и боевой частью авиационной управляемой ракеты, третий выход модуля 3 обработки информации соединен с первым входом первого 9 ключа, выход которого соединен с первым входом усилителя 6 мощности и привода антенны, первый и второй выход которого механически связан с антенной 1 и входом вычислителя 10 формирования команды на подрыв боевой части ракеты.
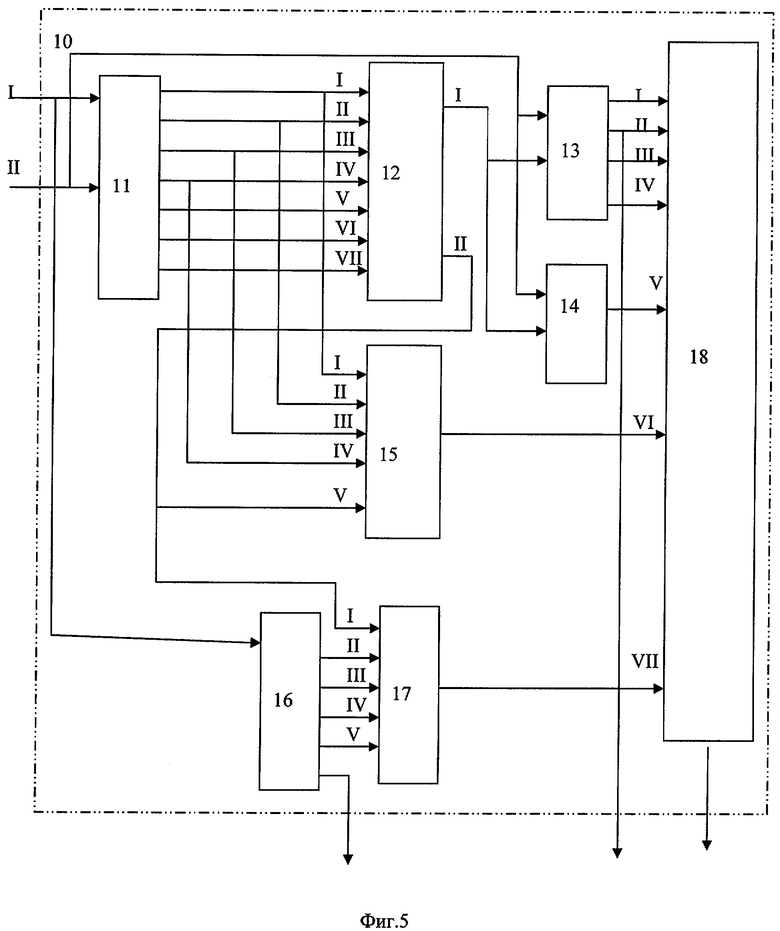
Вычислитель 10 формирования команды на подрыв боевой части ракеты состоит из блока 11 фиксации текущих параметров движения цели и ракеты, блока 12 определения дальности до цели, блока 13 определения промаха ракеты, блока 14 определения ракурса цели, блока 15 определения скорости движения цели, последовательно соединенных блока 16 управления антенной и блока 17 определения геометрических размеров цели, блока 18 формирования команды на подрыв боевой части ракеты, причем первым, вторым и третьим входом вычислителя 10 формирования команды на подрыв боевой части ракеты являются соответственно первые входы блока 11 фиксации текущих параметров движения цели и ракеты и одновременно блока 12 определения дальности и блока 16 управления антенной, вторым входом блока 11 фиксации текущих параметров цели и ракеты и третьим входом блока 16 управления антенной, первый, второй, третий, четвертый, пятый, шестой и седьмой выходы блока 11 фиксации текущих параметров цели и ракеты соединены соответственно со вторым, третьим, четвертым, пятым, шестым, седьмым и восьмым входами блока 12 определения дальности и одновременно соответственно с первым, вторым, третьим и четвертым входами блока 15 определения скорости сближения, первый и второй выход блока 12 определения дальности соединены соответственно с входами блока 13 определения промаха и одновременно блока 14 определения ракурса и первым входом блока 18 формирования команды на подрыв боевой части ракеты, пятым входом блока 15 определения скорости, первым входом блока определения 17 геометрических размеров цели, первый выход блока 13 определения промаха, выходы блока определения ракурса 14 цели, блока 15 определения скорости сближения ракеты с целью, блока 17 определения геометрических размеров цели, соединены соответственно с третьим, четвертым, вторым, пятым и шестым входами блока 18 формирования команды на подрыв боевой части ракеты, первым, вторым и третьим выходами вычислителя 10 формирования команды на подрыв боевой части ракеты являются соответственно второй выход блока 13 определения промаха, пятый выход блока 16 управления антенной и выход блока 18 формирования команды на подрыв боевой части ракеты.
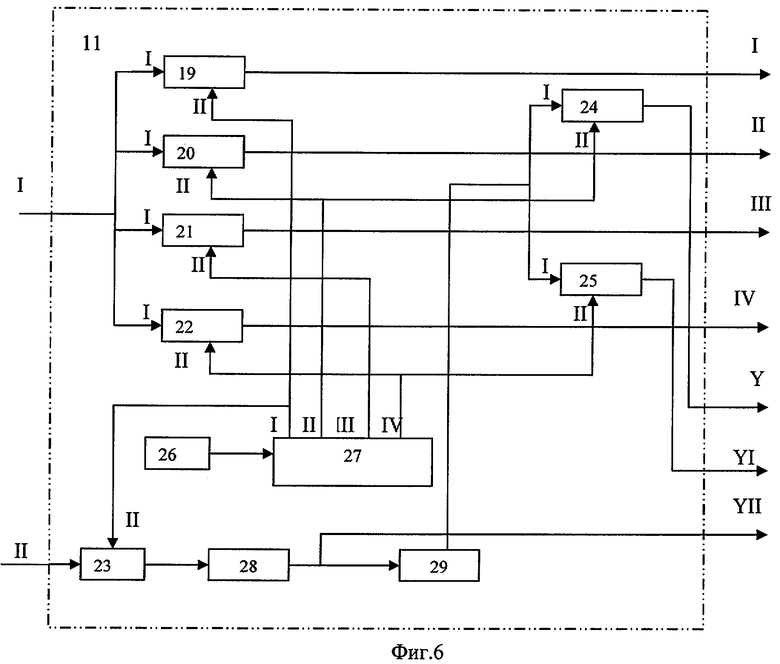
Блок 11 фиксации текущих параметров движения цели и ракеты состоит из второго 19, третьего 20, четвертого 21, пятого 22, шестого 23, седьмого 24, восьмого 25 ключей, последовательно соединенных первого 26 генератора импульсов и первого 27 сдвигового регистра, последовательно соединенных первого 28 и второго 29 интегратора, причем первый и второй вход блока 11 фиксации текущих параметров движения цели и ракеты являются соответственно первыми входами третьего 19, четвертого 20, пятого 21 и шестого 22 ключей, первый, второй, третий и четвертые выходы первого 27 сдвигового регистра соединены соответственно со вторыми входами второго 19 и шестого 23, третьего 20 и седьмого 24, четвертого 21, пятого 22 и восьмого 25 ключей, выход второго 29 интегратора соединен с первыми входами седьмого 24 и восьмого 25 ключей, первым, вторым, третьим, четвертым, пятым, шестым, седьмым и восьмым выходом блока 11 фиксации текущих параметров движения цели и ракеты являются соответственно выходы второго 19, третьего 20, четвертого 21, пятого 22, седьмого 24, восьмого 25 ключей и выход первого 28 интегратора.
Блок 12 определения дальности до цели состоит из блока 30 определения дальности до цели в первом фиксированном угловом положении, блока 31 определения дальности до цели в четвертом фиксированном угловом положении, блока 32 определения текущей дальности до цели, блока 33 определения угла наклона траектории движения цели, причем первый, второй, третий, четвертый, пятый, шестой и седьмой входы блока 12 определения дальности являются соответственно первыми, вторыми, третьими, четвертыми, пятыми, шестыми и седьмыми входами блока 30 определения дальности в первом фиксированном угловом положении и одновременно первыми, вторыми, третьими, четвертыми, пятыми, шестыми входами блока 33 определения угла наклона траектории движении цели, выход блока 30 определения дальности в первом фиксированном угловом положении и первый и второй выход блока 33 определения угла наклона траектории движении цели соединены соответственно со вторым и третьим входами блока 32 определения текущей дальности, первый вход которого соединен с выходом блока 31 определения дальности до цели в четвертом фиксированном положении, а выход является выходом блока 12 определения дальности.
Блок 13 определения промаха ракеты состоит из первого 34, второго 35 функционального преобразователей, первого 36, второго 37, третьего 38, четвертого 39 умножителей, первого 40, второго 41, третьего 42 сравнивающих устройств, первого 43, второго 44, третьего 45 запоминающих устройств, первого 46, второго 47 и третьего 48 квадраторов, первого 49 вычитающего устройства, первого 50 суммирующего устройства, первого 51 задатчика постоянных сигналов, причем первый, второй входы блока 13 определения промаха ракеты являются соответственно входом первого 34 функционального преобразователя, первым входом первого 36 умножителя и одновременно вторыми входами первого 43, второго 44, третьего 45 запоминающих устройств, выход первого 34 функционального преобразователя соединен со вторым входом первого 36 умножителя, выход которого соединен с первыми входами первого 40, второго 41 и третьего 42 сравнивающих устройств, первый, второй, третий, четвертый, пятый, шестой выходы первого 51 задатчика постоянных сигналов соединены со вторыми входами соответственно первого 40, второго 41, третьего 42 сравнивающих устройств, второго 37, третьего 38, четвертого 39 умножителей, выходы первого 40, второго 41, третьего 42 сравнивающих устройств соединены с первыми входами соответственно первого 43, второго 44, третьего 45 запоминающих устройств, выходы которых соединены с входами соответственно первого 46, второго 47, третьего 48 квадраторов, выходы которых соединены соответственно с первыми входами второго 37, третьего 38, четвертого 39 умножителей, выходы которых соединены соответственно с первым и вторым входами первого 49 вычитающего устройства, вторым входом первого 50 суммирующего устройства, первый вход которого соединен с выходом первого 49 вычитающего устройства, а выход со входом второго 35 функционального преобразователя, первым, вторым, третьим, четвертым выходом блока 13 определения промаха ракеты является соответственно седьмой выход первого 51 задатчика постоянных сигналов, выходы второго 41, третьего 42 сравнивающих устройств, выход второго 35 функционального преобразователя.
Блок 16 управления антенной состоит из девятого 52, десятого 53, одиннадцатого 54, двенадцатого 55 ключей, первого 56 и второго 57 элемента И, второго 58 генератора импульсов, второго 59 и третьего 60 сдвигового регистра, 61 - цифроаналогового преобразователя, первого 62 элемента И-HE, причем первый, второй, третий входы блока 16 управления антенной являются соответственно первыми входами девятого 52, десятого 53, одиннадцатого 54 и двенадцатого 55 ключей, первыми и вторыми входами первого 56 элемента И, выход которого соединен со входами первого 62 элемента И-НЕ и второго 58 генератора импульсов, выходы которых соединены соответственно со вторым и первым входом второго 57 элемента И, выход которого соединен со входом третьего 60 сдвигового регистра, кроме того выход второго 58 генератора импульсов соединен со входом второго 59 сдвигового регистра, первый и второй выход которого соединен соответственно со вторыми входами девятого 52 и одиннадцатого 53 ключей и первым и вторым входом цифроаналогового преобразователя 61, n-вход которого соединен с n-выходом второго 59 сдвигового регистра, первый и второй выход третьего 60 сдвигового регистра соединен соответственно со вторыми входами десятого 53 и двенадцатого 55 ключей, первыми, вторыми, третьими, четвертыми и пятыми выходами блока 16 управления антенной являются соответственно выходы девятого 52, десятого 53, одиннадцатого 54, двенадцатого 55 ключей и цифроаналогового преобразователя 61.
Блок 18 формирования команды на подрыв боевой части ракеты состоит из первого 62, второго 63 и третьего 64 делителей, пятого 65 умножителя, второго 66 вычитающего устройства, второго 67 и третьего 68 суммирующих устройств, четвертого 69 и пятого 70 сравнивающих устройств, второго 71 и третьего 72 элементов И-НЕ, третьего 73 и четвертого 74 элементов И, двенадцатого 75, тринадцатого 76 и четырнадцатого 77 ключей, второго 78 задатчика постоянных сигналов, причем первый, второй, третий, четвертый, пятый и шестой входы блока 18 формирования команды на подрыв боевой части ракеты являются соответственно первыми и вторыми входами второго 63, первого 62 делителей, первым входом третьего 64 делителя, входом пятого 70 сравнивающего устройства, кроме того второй вход первого 62 делителя соединен со вторым входом третьего 64 делителя и со вторым входом четвертого 69 сравнивающего устройства, выходы первого 62, второго 63 и третьего 64 делителей соединены соответственно с первым, вторым входами второго 66 вычитающего устройства и первым входом пятого 65 умножителя, выход которого соединен с третьим входом второго 66 вычитающего устройства, первый, второй, третий, четвертый, пятый выходы второго 78 задатчика постоянных сигналов соединены соответственно с первыми входами пятого 70 и четвертого 69 сравнивающих устройств, вторыми входами двенадцатого 75, тринадцатого 76 и четырнадцатого 77 ключей, выходы четвертого 69 и пятого 70 сравнивающих устройств соединены соответственно с первыми входами третьего 73 элемента И и элемента 72 И-НЕ, двенадцатого 75 ключа и второго 71 элемента И-НЕ, выход которого соединен со вторым входом второго 71 элемента И-НЕ и первым входом третьего 73 элемента И, выходы которых соответственно соединены с первыми входами тринадцатого 76 и четырнадцатого 77 ключей, выходы которых соединены соответственно со вторым входом второго 67 суммирующего устройства и вторым входом третьего 68 суммирующего устройства, первый вход которого соединен с выходом двенадцатого 75 ключа, а выход со вторым входом пятого 65 умножителя, выход которого соединен с третьим входом второго 66 вычитающего устройства, выход которого соединен с первым входом второго 67 суммирующего устройства, выход которого является выходом блока 18 формирования команды на подрыв боевой части ракеты.
Устройство работает следующим образом.
Пассивная головка самонаведения может работать в трех режимах: целеуказания, самонаведения и памяти (экстраполяции). В режиме целеуказания из бортовой аппаратуры самолета-носителя кроме команд подготовки поступают команды, определяющие направления приема и настройку РГС на основные параметры принимаемых радиосигналов: несущую частоту fн и период повторения Тп. По этим же параметрам в модуле обработки осуществляется и автоматическая селекция. Пространственная селекция обычно выполняется следящим угломером с фазовой пеленгацией, а селекция по fн и Тп - с помощью следящих за этими параметрами алгоритмов. В процессе сопровождения целей по направлению в угломере РГС определяются оценки бортовых пеленгов цели и их производные в горизонтальной и вертикальной плоскостях. Наличие этих фазовых координат позволяет формировать вектор параметров рассогласования Δ, соответствующих разновидностям прямого метода, либо метода последовательных упреждений. Если в состав ИВС ракеты входит доплеровский измеритель скорости и сноса, вычисляющий оценки скорости и угла сноса, и экстраполятор дальности, вычисляющий оценку дальности Д до цели, то наведение может выполняться и более современным методом. В режим памяти ИВС переходит при пропадании сигналов цели. В этом режиме ракета наводится по экстраполированным значениям всех требуемых фазовых координат. Экстраполяция, как правило, основана на гипотезе изменения состояния с постоянными скоростями, имевшими место на момент пропадания сигналов. В режиме памяти в селекторе цели одновременно экстраполируется несущая частота и период повторения сигналов. Эта особенность дает возможность возобновить процессы автоматического сопровождения сигналов цели, а соответственно, и самонаведения при повторном появлении ее сигналов без перехода в режим поиска.
Рассмотрим решение задачи по определению параметров траектории движения цели с использованием ее дискретных угловых положений. Пусть ракета перемещается в плоскости OY1X1 по прямой Ц1Ц4 (фиг.2) с постоянной скоростью  const, а цель - по оси ОХ1 так, что его продольная ось совпадает с ней, т.е. траектории ракеты и цели компланарны. Допустим, что угловое положение цели, находящейся в точке Ц1 траектории, определяется относительно ракеты углом β1, а дальность - вектором
const, а цель - по оси ОХ1 так, что его продольная ось совпадает с ней, т.е. траектории ракеты и цели компланарны. Допустим, что угловое положение цели, находящейся в точке Ц1 траектории, определяется относительно ракеты углом β1, а дальность - вектором  .
.
Через достаточно малый интервал времени цель переместится в точку Ц2 на расстояние  , а ракета - в точку И2, на расстояние
, а ракета - в точку И2, на расстояние  ,
,
где:
- V1 - скорость ракеты на участке И1И2;
- T1 - первый интервал времени между измерениями.
Угловое положение цели, находящийся в точке Ц2, будет определяться углом β2, а дальность - вектором  .
.
Через очередной интервал времени T2=T1 цель, пройдя расстояние  , окажется в точке траектории Ц3, а ракета - в точке И3, переместившись на расстояние
, окажется в точке траектории Ц3, а ракета - в точке И3, переместившись на расстояние  , где
, где  - скорость ракеты на втором участке. Будем считать, что
- скорость ракеты на втором участке. Будем считать, что  , следовательно,
, следовательно,  .
.
Угловое положение цели в точке Ц3 определяется углом β3, а дальность - вектором 
Через очередной интервал Т3=Т2=Т1 цель будет находиться в точке траектории Ц4, а ракета - в точке И4. Расстояние, на которое переместится цель за интервал времени Т3, равно  . За то же время ракета пройдет расстояние
. За то же время ракета пройдет расстояние  где
где  - скорость ракеты на участке И3И4. Примем, что
- скорость ракеты на участке И3И4. Примем, что  а Т3=Т2=Т, следовательно,
а Т3=Т2=Т, следовательно,  .
.
Угловое положение ракеты в точке Ц4 определяется углом β4, а расстояние - вектором  .
.
Итак, нам известны:
- расстояния, которые пролетает ракета за промежутки времени T1=Т2=Т3=Т. С учетом того, что  , а
, а  , получаем
, получаем  , а
, а  ;
;
- угловые положения цели, находящейся последовательно в точках траектории Ц1, Ц2, Ц3 и Ц4, относительно ракеты определяются углами β1, β2, β3 и β4 соответственно. Причем считаем, что β1<β2<β3<β4 и βi (i=1, 2, 3, 4) меняется от 0 до 360°.
Требуется определить следующие параметры траектории цели:
- скорость =const (или расстояния  =const);
=const);
- угловое положение траектории Ц1Ц4 относительно оси OX1 - угол ε;
- расстояния до точек траектории Ц1, Ц2, Ц3 и Ц4 -  соответственно.
соответственно.
Следует отметить, что допущение о движении ЛА1 по прямолинейной траектории с постоянной скоростью обуславливается тем, что интервалы времени, через которые осуществляются замеры, достаточно малы (десятая доля секунды и менее), и поэтому даже для маневренных летательных аппаратов, выполняющих полет с перегрузкой (маневр), отклонение траектории от линейной и изменение скорости будут, как отмечается в [1], малы, и ими в первом приближении можно пренебречь.
Рассмотрим решение задачи для случая, когда ЛА1 догоняет ЛА2, т.е. находится в задней полусфере (фиг.2).
Решение задачи будем вести в следующей последовательности:
Рассматривая четырехугольники:
И1Ц1Ц2И2, И2Ц2Ц3И3 и И3Ц3Ц4И4, можно в векторной форме записать очевидное уравнение:
В проекциях на оси ох1 и oy1 система (1) запишется в виде:
Обозначим Д11=X1; Д21=Х2; Д31=Х3
Д41=Х4; Lsinε=Х5; Lcosε=Х6
Используя принятые обозначения, запишем систему (2) в канонической форме:

Система (3) легко решается, например, методом Гаусса. В результате решения находим зависимости для определения неизвестных х1, х2, х3, х4, х5, х6.
Эти зависимости имеют вид:






Формулы для определения х2, х3, х4 в окончательном виде здесь не приводятся в силу их большой громоздкости.
Для нахождения L и ε следует решить совместно уравнения (6) и (7).
Таким образом, зависимости (4...9) позволяют определить требуемые параметры любой воздушной цели.
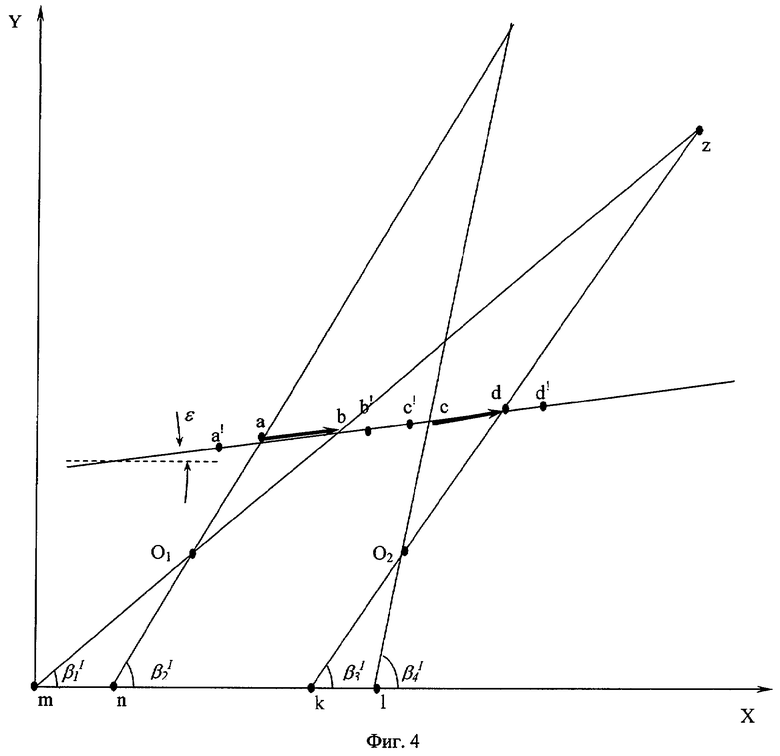
Геометрические размеры цели определяются на основе сканирования цели (фиг.4.).
Δt=tск+Т b=bb1+b1d=Vц(tск+Т)
из Δbzd:

из Δmzk:
из рисунка, приведенного на фиг.4, mk=mn+nk=Vn(tск+T), следовательно

из Δmo1n:


из рисунка:
из Δo1ab

находим длину цели Lц

Ракурс цели определяется на основе информации о текущей дальности, угловом положении цели. Рассмотрим схему сближения ракеты с целью на фиг.2.
∠Ц1OрЦ4=90-ϕn; ∠ОЦ4Ц1=γ=180-[α+(90-ϕ]=[90-(α-ϕn)]; ∠β=γ-90°=(γn-α).
при α≠n·π(n=0,1)
где Δϕ=rn+1-rn
с учетом 1 и 2: 
Из рисунка видно, что: ∠КЦ2Ц1=∠β

∠КЦ10=∠q=Θ-α
С учетом 4 и 2 имеем: 
Ракурс цели: 
Рассмотрим определения промаха ракеты относительно цели.
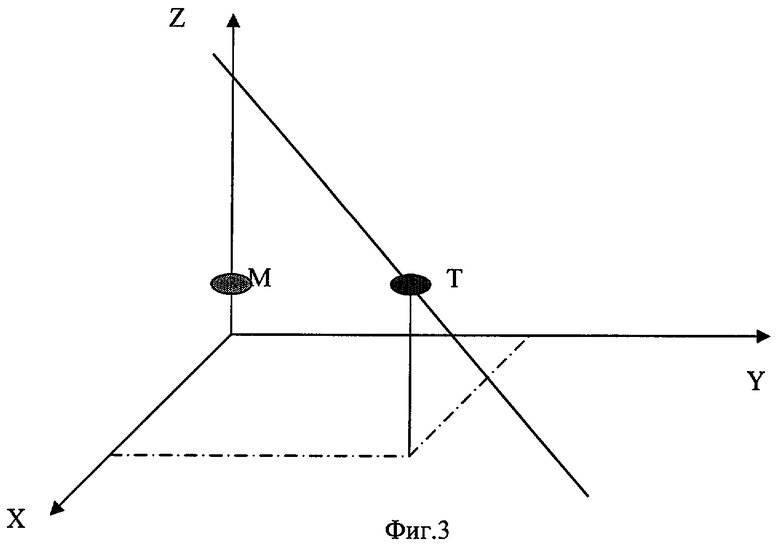
Согласно фиг.3 координаты цели относительно оси Z обозначены дискретными значениями Z1, Z2 Z3, текущие значения дальности, соответствующие моменту прохода целью трех фиксированных точек - r1, r2, r3 и текущие значения углового положения цели -.ϕ1, ϕ2, ϕ3.
Промах ракеты относительно цели определяется на основе фиксации текущих значений дальности и углового положения при проходе целью трех заданных расстояний.
Трехмерный график, поясняющий алгоритм определения промаха ракеты относительно цели, приведен на фиг.3.
Согласно фиг.3 расположение ракеты (М) и цели (Т) в некоторый момент времени t будет:
где Vm, VT - скорость ракеты и цели соответственно.
Тогда расстояние r до цели может быть рассчитано по формуле:
 или
или

где  .
.
Тогда r2=α2z2+βZ+γ, где  ; Z=KT;
; Z=KT;  .
.
Для частного случая α, β, γ постоянны.
Для трех различных значений моментов времени:

и  ;
;
 .
.
Определив r4 как предел, при котором Z=Z4=0, получим:

 .
.
Тогда, произведя преобразования, получим;
 .
.
Промах ракеты относительно цели можно представить в виде выражения:

где 
 - постоянные коэффициенты.
- постоянные коэффициенты.
Вычислитель (фиг.5) формирования команды на подрыв боевой части ракеты обеспечивает реализацию вышеприведенных алгоритмов и формирования команды на подрыв боевой части ракеты в соответствии с геометрическими размерами цели и условиями подхода ракеты к ней.
Блок (фиг.11) фиксации текущих параметров движения цели и ракеты (БФТПДЦР) обеспечивает фиксацию текущих значений угловых положений цели и базовых расстояний, проходимых ракетой относительно фиксированных угловых положений цели. На основе данной информации определяется дальность до цели и скорость сближения ракеты с целью в соответствующих блоках вычислителя.
На первый вход БФТПДЦР 11 поступает сигнал, пропорциональный угловому положению цели от усилителя 6 мощности и привода антенны.
С первого входа блока 11 фиксации текущих параметров движения цели сигнал поступает на первые входы второго 19, третьего 20, четвертого 21, пятого 22 ключей, на второй вход которых поступают сигналы с выходов первого 27 сдвигового регистра, входным сигналом которого являются сигналы с выхода генератора 26 импульсов.
На второй вход БФТПДЦР 11 поступает сигнал, пропорциональный ускорению движения ракеты от системы 5 автономных датчиков ракеты.
Данный сигнал через шестой 23 ключ, первый 28, второй 29 интегратор поступает на первые входы седьмого 24 и восьмого 25 ключей, на вторые входы которых поступают сигналы со второго и четвертого выходов первого 27 сдвигового регистра, с выходов данных ключей поступают сигналы, пропорциональные значениям Б, Б3, а с выхода первого интегратора поступает сигнал, пропорциональный скорости движения ракеты.
Таким образом с выходов второго 19, третьего 20, четвертого 21, пятого 22, седьмого 24, восьмого 25 ключей поступают сигналы, пропорциональные угловым значениям цели β1 β2 β3 β4 и базовым расстояниям ракеты Б, Б3, а с выхода первого 28 интегратора пропорциональный значению скорости движения ракеты Vr, которые являются соответственно первыми, вторыми, третьими, четвертыми, пятыми, шестыми и седьмыми выходами БФТПДЦР 11.
Данные сигналы поступают соответственно на первый, второй, третий, четвертый, пятый, шестой и седьмой входы блока 12 определения дальности до цели (БОДЦ), которые являются соответственно первыми, вторыми, третьими, четвертыми, пятыми, шестыми и седьмыми входами блока 31 определения дальности до цели в первом угловом положении и одновременно первыми, вторыми, третьими, четвертыми, пятыми, шестыми входами блока 34 определении угла наклона траектории движения цели.
Блок 31 определяет дальность до цели в соответствии с алгоритмом:

Блок 34 определяет угол наклона траектории движения цели в соответствии с алгоритмом:
ε=arctg х3/х2,
где


Сигнал с выхода блока 31 определения дальности до цели в первом угловом положении, пропорциональный значениям Д11 и ε, поступают соответственно на первый и второй вход блока 32 определения дальности в четвертом угловом положении, который формирует сигнал в соответствии с выражением:

Блок 33 определения текущей дальности до цели на основе входных сигналов Д41 и ε формирует сигнал в соответствии с выражением:

где Дn - дальность до цели в n-угловом положении, βn - значения углового положения цели, определяющего положения цели при n-измерении, Ln+1 - расстояние, проходимое целью между n и n+1 измерении, βn+1 - значения углового положения цели при n+1 измерении.
Таким образом, блок 12 на основе решения цикла приведенных выше алгоритмов осуществляет косвенное измерение текущей дальности до цели.
Входной информацией блока определения промаха является текущая дальность и угловое положение цели.
Информация о текущих значениях дальности и углового положения цели поступает на первые входы функционального преобразователя 34, первого умножителя 36, на второй вход которого поступает с выхода функционального преобразователя 34. С выхода умножителя информация поступает на первые входы первого 40, второго 41 и третьего 42 сравнивающих устройств, на вторые входы которых поступают сигналы с первого 51 задатчика постоянных сигналов. При превышении уровня заданных сигналов, с выходов сравнивающих устройств, сигналы поступают на первые входы первого 43, второго 44 и третьего 45 запоминающих устройств, на вторые входы которых поступают сигналы, пропорциональные текущей дальности до цели. С выходов запоминающих устройств последовательно по времени поступают сигналы, пропорциональные текущим значениям дальности при проходе цели фиксированных точек пространства (Z1, Z2, Z3) относительно цели (фиг.3). Данные сигналы через первый 46, второй 47 и третий 48 квадраторы поступают на первые входы второго 37, третьего 38 и четвертого 39 умножителей, на выходах которых формируются сигналы, пропорциональные соответственно значениям  . Данные сигналы поступают на вход второго 36 функционального преобразователя 35, через первое 49 вычитающее устройство и второе 50 суммирующее устройство. На выходе функционального преобразователя 36 формируется сигнал, пропорциональный промаху ракеты в виде выражения:
. Данные сигналы поступают на вход второго 36 функционального преобразователя 35, через первое 49 вычитающее устройство и второе 50 суммирующее устройство. На выходе функционального преобразователя 36 формируется сигнал, пропорциональный промаху ракеты в виде выражения:  который поступает на первый вход блока формирования команды на срабатывание боевой части ракеты.
который поступает на первый вход блока формирования команды на срабатывание боевой части ракеты.
Кроме того с выхода второго 41 и третьего 42 сравнивающих устройств поступает сигнал, определяющий момент прохода целью двух фиксированных расстояний Z2 и Z3, а с четвертого выхода задатчика 51 постоянных сигналов пропорциональный начальной скорости осколков V0.
Блок 16 управления антенной обеспечивает сканирование антенной тела цели и формирует сигналы, пропорциональные угловым положениям крайних точек на теле цели. Входными сигналами блока являются сигналы в угловом положении цели, с выхода приемника и сигналы, определяющие момент прохода целью фиксированного расстояния Z2.
В момент прохода целью второго фиксированного расстояния сигнал с пятого выхода блока 14 фиксации текущих параметров движения цели Z2 поступает на второй вход элемента И 56, на первый вход которого поступает сигнал с выхода приемника 4 отраженных сигналов, при наличии данных сигналов с выхода элемента И 56 сигнал поступает на генератор 58 импульсов. С выхода генератора 58 импульсов через сдвиговый регистр 42 и ЦАП 61 сигнал управления антенной поступает на первый вход усилителя 8 мощности и привода антенны. При этом происходит сканирование пространства в заданном диапазоне (за счет срабатывания ключа 12 происходит отключения усилителя 8 мощности и привода антенны от канала 11 управления антенной).
Фиксация крайних точек на теле цели происходит в момент появления отраженного сигнала от цели за счет срабатывания первого 56 элемента И, которое приводит к работе генератор 58 импульсов и второй 59 сдвиговый регистр, с первого выхода которого сигналы поступают на второй вход восьмого 52 ключа, а со второго выхода на второй вход десятого 54 ключа. На выходах данных ключей (52, 53) будут формироваться сигналы, пропорциональные значениям β′1, β′2.
Фиксация крайних точек на теле цели при пропадания сигнала происходит за счет срабатывания элемента И-НЕ 62, элемента И 57 и сдвигового регистра 60, с выходов которого сигналы поступают на вторые входы девятого 53 и одиннадцатого 55 ключа, срабатывание двух ключей обеспечивает измерения угловых положений β′3, β′4 при осуществлении двух циклов измерения.
На основе этих данных обеспечивается измерение геометрических размеров цели блоком 17 (фиг.5) в соответствии с выражением:

Блок 14 определения ракурса цели на основе обработки входной информации о текущей дальности и угловом положении цели в дискретные моменты времени, а также информации о скорости сближения и ускорении ракеты определяет ракурс цели. На выходе которого формируется сигнал в виде выражения:

Блок 15 определяет скорость цели на основе исходной информации о дискретных угловых положениях цели β1, β2, β3, β4, базовых расстояниях, проходимых ракетой Б и Б3, временного интервала между измерениями Δt, в соответствии с выражением:

Блок 18 формирования команды на подрыв боевой части ракеты осуществляет формирования сигнала на подрыв боевой части ракеты в соответствии с конкретными условиями подхода ракеты к цели и ее геометрическими размерами. Входной информацией, необходимой для функционирования данного блока, является информация о моменте прохода целью третьего фиксированного расстояния, о скорости сближения, промахе ракеты относительно цели, начальной скорости осколков, геометрических размерах цели и ракурсе о цели.
Информация о промахе ракеты (r4), начальной скорости разлета осколков (V0), моменте прохода целью третьего фиксированного расстояния (Z3), скорости сближения (Vсбл), геометрических размерах цели L, ракурсе цели ϕ, через соответственно первый, второй, третий, четвертый, пятый и шестой входы поступает соответственно на второй 63, первый, третий делители, а также четвертое и пятое сравнивающие устройства.
С выходов первого и второго делителя сигналы, пропорциональные соответствующим соотношениям Z3/Vсбл. и r4/V0, поступают на первый и второй входы второго 66 вычитающего устройства.
С выхода делителя 64 сигнал, пропорциональный отношению Lц/Vсбл, поступает на первый вход пятого 65 умножителя, на второй вход которого поступает сигнал, пропорциональный соотношению 1/2 или 2/3 в зависимости от значений ракурса цели и скорости сближения.
Если текущее значения ракурса цели больше определенного значения, то происходит срабатывание пятого 69 сравнивающего устройства, которое обеспечивает срабатывание двенадцатого ключа 75. Тогда со второго выхода задатчика 78 постоянных сигналов сигнал, пропорциональный коэффициенту 1/2, через двенадцатый ключ 75, третье 68 суммирующее устройство поступает на второй вход пятого 65 умножителя. С выхода умножителя 65 поступает сигнал, пропорциональный значению на третий вход вычитающего устройства 66.
В данном случае на выходе второго 66 вычитающего устройства будет сформирован сигнал в виде выражения:
Если ракурс цели и скорость сближения меньше заданного значения, то происходит срабатывание второго 71 и третьего 72 элемента И-НЕ и как следствие срабатывание четвертого 74 элемента И, четырнадцатого 77 ключа, при этом сигнал с пятого выхода задатчика 78 постоянных сигналов через ключ 77, второй вход суммирующего устройства 68 и второй вход умножителя 65 поступает на третий вход вычитающего устройства 66.
В данном случае на выходе вычитающего устройства 66 будет сформирован сигнал в виде выражения:
Если ракурс цели меньше заданного значения, а скорость сближения больше заданного значения, тогда происходит срабатывание второго 71 элемента И-НЕ и как следствие третьего 73 элемента И, тринадцатого 76 ключа, при этом сигнал с четвертого выхода задатчика 78 постоянных сигналов через ключ 76 поступает на второй вход суммирующего устройства 67.
В данном случае на выходе суммирующего устройства будет сформирован сигнал в виде выражения:
Таким образом, дополнительно с наведением ракеты осуществляется формирование команды на подрыв боевой части ракеты в соответствии с условиями подхода ракеты к цели и геометрическими размерами цели.
Изобретение относится к области ракетной техники, авиационным управляемым ракетам класса «воздух-воздух». Способ заключается в измерении параметров движения цели и собственного движения ракеты. Для повышения эффективности боевого применения ракеты определяют три дискретных значения углового положения цели и два базовых расстояния, проходимых ракетой при постоянной скорости ее полета между первой, второй и третьей засечкой, одно значение углового положения цели при осуществлении четвертой засечки и базовое расстояние, проходимое ракетой при снижении ее скорости полета между третьей и четвертой засечкой. Определяют дальность, скорость сближения ракеты с целью, определяют промах ракеты и ракурс цели, определяют геометрические размеры цели путем сканирования цели относительно второй опорной точки относительно ракеты и формируют команду на подрыв боевой части ракеты относительно третьей опорной точки ракеты. Устройство содержит последовательно соединенные антенну, приемник, модуль обработки сигнала, соединенный с аппаратурой истребителя, и вычислитель параметров рассогласования. Для достижения того же технического результата введен первый ключ и вычислитель формирования команды на подрыв боевой части ракеты, причем первый и второй входы вычислителя соединены соответственно с выходом системы автономных датчиков и выходом усилителя мощности и привода антенны. Первый, второй, третий выходы вычислителя формирования команды на подрыв боевой части ракеты соединены соответственно со вторым входом первого ключа, вторым входом усилителя мощности и привода антенны, боевой частью авиационной управляемой ракеты, третий выход модуля обработки информации соединен с первым входом первого ключа, выход которого соединен с первым входом усилителя мощности и привода антенны, первый и второй выходы которого механически связаны с антенной и входом вычислителя формирования команды на подрыв боевой части ракеты. 2 н. и 16 з.п. ф-лы, 10 ил.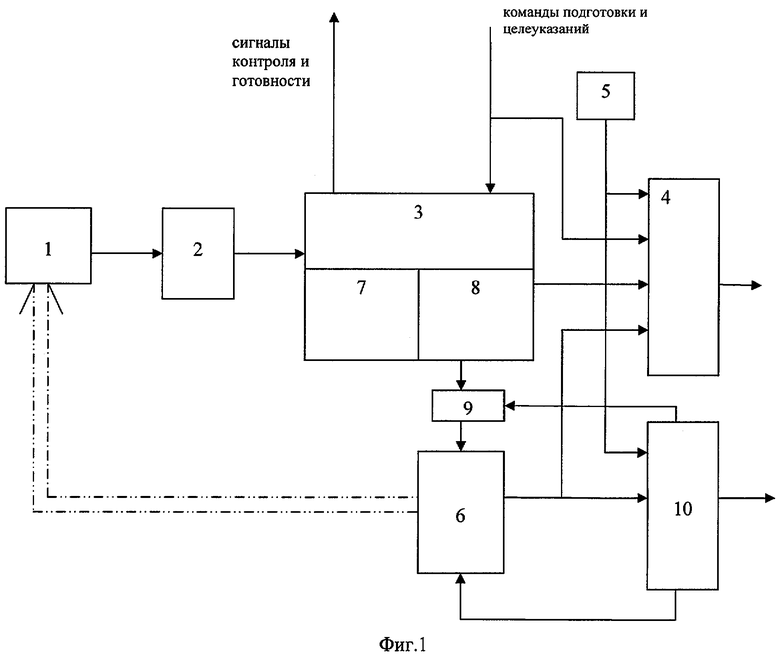
 ,
,
где Дn - дальность до цели в n угловом положении, βn - значение углового положения цели, определяющего положение цели при n измерении, Ln+1 - расстояние, проходимое целью между n и n+1 измерениями, βn+1 - значения углового положения цели при n+1 измерении, ε - угол наклона траектории движения цели.
 ,
,
где Д11 - дальность до цели при нахождении ее на линии визирования в момент измерения первого углового положения, β1 - угол, определяющий положение линии визирования в первый момент измерения; Б - базовое расстояние, проходимое ракетой между первым и вторым измерениями, Б3 - базовое расстояние, проходимое ракетой после третьего измерения; β4 - угол, определяющий положение линии визирования в четвертый момент измерения.
 ,
,
где β2β3 - угловое положение цели во второй и третий моменты измерения.
ε=arctg x3/x2,
где x3, x2 - проекции траектории движения цели на ось ox1, oy1 системы координат OY1X1, связанной с ракетой.


 ,
,
где Δt - временной интервал между измерениями.

где А, В, С - постоянные коэффициенты, r1, r2, r3 - текущие расстояния, фиксируемые при проходе целью трех заданных расстояний.
 ,
,
где Vr, Vц - модули скорости ракеты и цели, β - угол между составляющими вектора цели, Δϕ - угловой размер между двумя фиксированными точками относительно ракеты, rn, rn+1 - текущие значения дальности до цели.

где Vп - скорость полета ракеты; tск - время сканирования цели, Т - время между окончанием первого сканирования и началом второго сканирования,  - угловые положения конечных точек на теле цели в первый и второй циклы измерений.
- угловые положения конечных точек на теле цели в первый и второй циклы измерений.
если ракурс цели q>qп то в виде 
где V0 - начальная скорость разлета осколков, Z3 - третье фиксированное расстояние до цели, Vсбл - скорость сближения ракеты с целью, qп - пороговое значение ракурса цели;
если q<qп и Vсбл<Vп то в виде 
если q<qп и Vсбл>Vп то в виде 
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2253825C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2002 |
|
RU2213318C1 |
| СПОСОБ ПОРАЖЕНИЯ НАЗЕМНЫХ И ВОЗДУШНЫХ ЦЕЛЕЙ И УСТРОЙСТВО (БОЕПРИПАС) ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2158408C1 |
| Устройство окулярной части перископа с переключателем квазибинокулярного режима в режим монокуляра и обратно | 2024 |
|
RU2830078C1 |
| DE 10158666 A1, 18.06.2003 | |||
| DE 19950669 A1, 26.04.2001 | |||
| JP 2003084062 A, 19.03.2003 | |||
| МЕРКУЛОВ В.И., ЛЕПИН В.Н | |||
| Авиационные системы радиоуправления | |||
| - М.: Радио и связь, 1997, с.201. | |||

