Изобретение относится к оборонной технике и может быть использовано при создании боевых частей, в частности для высокоточных управляемых снарядов или ракет малого и среднего калибра.
Наиболее близким к изобретению является способ управления характеристиками поля поражения осколочно-фугасной боевой части ракеты, заключающийся в излучении двух действующих в разных диапазонах электромагнитного спектра неконтактных датчиков цели, в фиксации цели и определении стороны ее пролета на больших промахах радиометрическим датчиком цели, в фиксации цели и определении стороны ее пролета на малых промахах оптическим датчиком цели, формировании команды на подрыв электронным блоком расчета времени задержки, формировании поля поражения в направлении на цель за счет подачи команды на срабатывание предохранительно-исполнительного механизма, конечный узел которого смещен в сторону, противоположную стороне пролета цели /1/.
Наиболее близким к изобретению является устройство управления характеристиками поля поражения осколочно-фугасной боевой части ракеты, которая содержит контактный датчик цели, радиометрический неконтактный датчик цели для фиксации цели и определения стороны пролета на больших промахах, оптический неконтактный датчик цели, предназначенный для определения стороны пролета на малых промахах, а также электронный блок расчета времени задержки подрыва, снабженный устройством, обеспечивающим подачу команды на срабатывание предохранительно-исполнительного механизма, конечный узел которого смещен в сторону, противоположную стороне пролета цели, осколочно-фугасную боевую часть направленно-кругового действия, характеризующуюся наличием разрывного заряда и взрывательного устройства, включающего предохранительно-исполнительные механизмы, конечные узлы которых радиально смещены относительно оси заряда /1/.
Недостатками данных способа и устройства является низкая помехозащищенность, обусловленная неиспользованием предварительной информации о пространственном положении цели, полученной на основе анализа полярности сигналов от датчиков азимута и угла места головки самонаведения ракеты и учете динамики перемещения углового положения цели.
Технической задачей изобретения является повышение помехозащищенности за счет пространственной селекции цели, осуществляемой с учетом прогнозирования углового перемещения цели.
Решение технической задачи достигается тем, что в способе управления характеристиками поля поражения осколочно-фугасной боевой части ракеты, включающим излучение двумя действующими в разных диапазонах электромагнитного спектра неконтактными датчиками цели, фиксацию цели и определение стороны ее пролета на больших промахах, фиксацию цели и определении стороны ее пролета на малых промахах, формирование времени задержки на подрыв боевой части ракеты, дополнительно определяют положение цели относительно оси ракеты на основе сравнения полярности сигналов от датчиков азимута и угла места головки самонаведения ракеты, сравнивают положение цели, определяемой, с одной стороны, головкой самонаведения ракеты, а с другой стороны - радиолокационным датчиком цели и оптическим датчиком цели и при совпадении положений цели устаналивают факт отсутствия помехи и определяют значения угловой скорости и ускорения перемещений цели на основе сравнения угловых координат цели с заданными значениями, определяют динамику углового перемещения цели на основе значений угловой скорости и ускорения движения цели, определяют прогнозируемое угловое положение цели на основе учета динамики ее углового перемещения и формируют поле поражения боевой части ракеты в направлении пролета цели с учетом ее прогнозируемого углового перемещения.
Заявляемый способ реализуется в устройстве управления характеристиками поля поражения осколочно-фугасной боевой части ракеты направленно-кругового действия с разрывным зарядом и взрывательным устройством, включающим предохранительно-исполнительные механизмы, конечные узлы которых радиально смещены относительно оси заряда, содержащим контактный датчик цели, радиометрический неконтактный датчик цели, предназначенный для фиксации цели и определении стороны ее пролета на больших промахах, оптический неконтактный датчик цели, предназначенный для фиксации цели и определении стороны ее пролета на малых промахах, а также электронный блок расчета времени задержки подрыва с устройством, обеспечивающим подачу команды на срабатывание предохранительно-исполнительного механизма, которое дополнительно снабжено датчиком азимута, и угла наклона головки самонаведения ракеты, блоком селекции цели, блоком коррекции углового положения цели, при этом первый, второй, третий, четвертый и пятый входы блока селекции цели соединены соответственно с входами приемных антенн радиометрического неконтактного датчика цели, входами передающих и приемных антенн оптического неконтактного датчика цели, датчика азимута и угла наклона головки самонаведения ракеты, первый, второй, третий, четвертый, пятый и шестой выходы которого соединены с первым и вторым входами электронного блока, третьим, четвертым, пятым и шестым входами блока коррекции углового положения цели, первый и второй входы которого соединены с входами датчика азимута и угла места, а первый, второй, третий, четвертый, пятый, шестой, седьмой и восьмой выходы которого соединены соответственно с третьим, четвертым, пятым, шестым, седьмым, восьмым, девятым и десятым входами электронного блока.
Кроме того, блок селекции цели состоит из первого, второго, третьего и четвертого диода, первого, второго, третьего и четвертого элементов И, первого, второго, третьего, четвертого, пятого, шестого, седьмого и восьмого ключей, первого и второго элементов ИЛИ, при этом первые, вторые, третий и четвертый входы блока селекции цели соединены с первыми входами пятого, шестого, седьмого, восьмого, первого, второго, третьего, четвертого ключей, одновременно - с входами первого и второго диодов, одновременно - с входами третьего и четвертого диодов, первый и третий диоды подключены по схеме обратного включения, второй и четвертый включены по схеме прямого включения, выходы первого, второго, третьего и четвертого диодов соединены соответственно с первыми входами второго и третьего, первого и четвертого, вторыми входами третьего, четвертого, второго и первого элементов И, выходы первого, второго, третьего и четвертого элементов И соединены со вторыми входами соответственно первого и пятого, второго и шестого, третьего и седьмого, четвертого и восьмого ключей, выходы первого, второго, третьего и четвертого ключей соединены с входами первого элемента ИЛИ, выходы пятого, шестого, седьмого и восьмого ключей соединены со входами второго элемента ИЛИ, выходы второго и первого элементов ИЛИ, первого, второго, третьего и четвертого элементов И являются соответственно первым, вторым, третьим, четвертым, пятым и шестым выходами блока селекции цели.
Кроме того, блок коррекции углового положения цели содержит канал коррекции углового положения цели по азимуту, канал коррекции углового положения цели по углу места, первый, второй, третий, четвертый, пятый, шестой, седьмой и восьмой ключи, причем первый и второй входы блока коррекции углового положения цели являются входами канала коррекции углового положения цели по азимуту, канала коррекции углового положения цели по углу места, выходы которых соединены соответственно с первыми входами первого, второго, третьего, четвертого, пятого, шестого, седьмого и восьмого ключей, вторые входы первого и пятого, второго и шестого, третьего и седьмого, четвертого и восьмого ключей соединены соответственно с третьим, четвертым, пятым и шестым входами блока селекции цели.
Кроме того, каждый из каналов коррекции углового положения цели по азимуту или углу места, содержит n - пороговые устройства, задатчик сигналов, дифференцирующую цепь, элемент ИЛИ, сдвиговой регистр, первый и второй элементы И, первый и второй элементы НЕ, генератор импульсов, первый и второй счетчики, вычитающее устройство, первый и второй интеграторы, сумматор, при этом вход канала коррекции углового положения цели соединен одновременно с входом дифференцирующей цепи и с первыми входами n-пороговых устройств, вторые входы которых соединены с выходами задатчика сигналов, выходы пороговых устройств, через элемент ИЛИ, соединен с первым входом сдвигового регистра, второй и третий входы которого соединены соответственно с выходом дифференцирующей цепи и генератором импульсов, первый, второй, третий и четвертый выходы сдвигового регистра соединены соответственно с первыми входами первых элементов И, НЕ и вторых элементов И, НЕ, вторые входы первого и второго элементов И соединены с выходом генератора импульсов, а третьи выходы с выходами соответственно первого и второго элементов НЕ, выходы первого и второго элементов И соединены соответственно с первыми входами первого и второго счетчиков, вторые входы которых соединены с выходом дифференцирующей цепи, выход первого и второго счетчиков соединены соответственно с первым и вторым входами вычитающего устройства, выход первого счетчика соединен с входом первого интегратора, выход которого соединен со вторым входом сумматора, выход вычитающего устройства, через второй интегратор, соединен с первым входом суммирующего устройства, выход которого является выходом канала коррекции углового положения цели по азимуту или углу места.
Новыми признаками, обладающими существенными отличиями по способу, является следующая совокупность действий.
1. Определяют положение цели относительно оси ракеты на основе сравнения полярности сигналов от датчиков азимута и угла места головки самонаведения ракеты.
2. Сравнивают положение цели, определяемой, с одной стороны, головкой самонаведения ракеты, а с другой стороны - радиолокационным датчиком цели и оптическим датчиком цели.
3. При совпадении положений цели устаналивают факт отсутствия помехи.
4. Определяют значения угловой скорости и ускорения перемещений цели на основе сравнения угловых координат цели с заданными значениями.
5. Определяют динамику углового перемещения цели на основе значений угловой скорости и ускорения движения цели.
6. Определяют прогнозируемое угловое положение цели на основе учета динамики ее углового перемещения.
7. Формируют поле поражения боевой части ракеты в направлении пролета цели с учетом ее прогнозируемого углового перемещения.
Новыми элементами, обладающими существенными отличиями по устройству, являются: датчик азимута и угла наклона головки самонаведения ракеты, блок селекции цели, блок коррекции и связи между известными и новыми элементами.
На фиг.1 изображена конструктивная схема устройства управления характеристиками поля поражения осколочно-фугасной боевой части ракеты, на фиг.2 - структурная схема устройства управления характеристиками поля поражения осколочно-фугасной боевой части ракеты, на фиг.3 - схема определения сектора нахождения цели относительно продольной оси ракеты, на фиг.4 - структурная схема блока селекции цели, на фиг.5 - структурная схема блока коррекции углового положения цели.
Устройство управления характеристиками поля поражения осколочно-фугасной боевой части ракеты (фиг.1) содержит разрывной заряд 1 и взрывательное устройство, включающее предохранительно-исполнительные механизмы 2а и 2б, контактный датчик 3 цели, радиометрический неконтактный датчик цели, содержащий излучающую 4 и принимающую 5 антенны, предназначенный для фиксации цели и определения стороны пролета на больших промахах, электронный блок 6 расчета времени задержки подрыва, блок 7 селекции цели, блок 8 коррекции углового положения цели.
Взрывательное устройство снабжено многоканальным оптическим неконтактным датчиком цели, содержащим излучающий 9а и 9б и принимающий 10а и 10б каналы, предназначенным для определения стороны пролета цели 11 на малых промахах, при этом электронный блок 6 расчета времени задержки подрыва снабжен устройством 12, обеспечивающим подачу сигнала на срабатывание предохранительно-исполнительного механизма 2а или 2б, конечный узел которого радиально смещен относительно оси заряда в сторону, противоположную стороне пролета.
Блок 7 селекции цели состоит из первого 13, второго 14, третьего 15 и четвертого 16 диодов, первого 17, второго 18, третьего 19 и четвертого 20 элементов И, первого 21, второго 22, третьего 23, четвертого 24, пятого 25, шестого 26, седьмого 27 и восьмого 28 ключей, первого 29 и второго 30 элементов ИЛИ, при этом первые, вторые группы, третий и четвертые входы блока 7 селекции соединены с первыми входами пятого 24, шестого 25, седьмого 26, восьмого 27, первого 20, второго 21, третьего 22, четвертого 23 ключей, одновременно с входами первого 13 и второго 14 диодов, одновременно с входами третьего 15 и четвертого 16 диодов, первый 13 и третий 15 диоды подключены по схеме обратного включения, второй 14 и четвертый 16 диоды включены по схеме прямого включения, выходы первого 13, второго 14, третьего 15 и четвертого 16 диодов соединены соответственно с первыми входами второго 18 и третьего 19, первого 17 и четвертого 20, вторым входом третьего 19, вторыми входами четвертого 20, второго 18 и первого 17 элементов И, выходы первого 17, второго 18, третьего 19 и четвертого 20 элементов И соединены со вторыми входами соответственно первого 21 и пятого 25, второго 22 и шестого 26, третьего 23 и седьмого 27, четвертого 24 и восьмого 28 ключей, выходы первого 21, второго 22, третьего 23 и четвертого 24 ключей соединены с входами первого 29 элемента ИЛИ, выходы пятого 25, шестого 26, седьмого 27 и восьмого 28 ключей соединены со входами второго 30 элемента ИЛИ, выходы второго 30 и первого 29 элементов ИЛИ, первого 17, второго 18, третьего 19 и четвертого 20 элементов И являются соответственно первым, вторым, третьим, четвертым, пятым и шестым выходами блока 7 селекции цели.
Блок 8 коррекции углового положения цели содержит канал 31 коррекции углового положения цели по азимуту, канал 32 коррекции углового положения цели по углу места, первый 33, второй 34, третий 35, четвертый 36, пятый 37, шестой 38, седьмой 39 и восьмой 40 ключи, причем первый и второй входы блока 8 коррекции являются входами канала 31 коррекции углового положения цели по азимуту, канала 32 коррекции углового положения цели по углу места, выходы которых соединены соответственно с первыми входами первого 33, второго 34, третьего 35, четвертого 36, пятого 37, шестого 38, седьмого 39 и восьмого 40 ключей, вторые входы первого 33 и пятого 37, второго 34 и шестого 38, третьего 35 и седьмого 39, четвертого 36 и восьмого 40 ключей соединены соответственно с третьим, четвертым, пятым и шестым входами блока 7 определения сектора нахождения цели относительно продольной оси ракеты.
Каждый из каналов (31, 32) коррекции углового положения цели содержит n-пороговые устройства 41, задатчик 42 сигналов, дифференцирующую цепь 43, элемент ИЛИ 44, сдвиговой регистр 45, первый 46 и второй 47 элементы И, первый 48 и второй 49 элементы НЕ, генератор 50 импульсов, первый 51 и второй 52 счетчики, вычитающее устройство 53, первый 54 и второй 55 интеграторы, сумматор 56, вход канала 31 коррекции углового положения цели соединен одновременно с входом дифференцирующей цепи 43 и с первыми входами n-пороговых устройств 41, вторые входы которых соединены с выходами задатчика 42 сигналов, выходы пороговых устройств 41 через элемент ИЛИ 44, соединены с первым входом сдвигового регистра 45, второй и третий входы которого соединены соответственно с выходом дифференцирующей цепи 43 и генератором 50 импульсов, первый, второй, третий и четвертый выходы сдвигового регистра 45 соединены соответственно с первыми входами первых 46, 48 элементов И, НЕ и вторых 47, 49 элементов И, НЕ, вторые входы первого 46 и второго 47 элементов И соединены с выходом генератора 50 импульсов, а третьи выходы - с выходами соответственно первого 48 и второго 49 элементов НЕ, выходы первого 46 и второго 47 элементов И соединены соответственно с первыми входами первого 51 и второго 52 счетчиков, вторые входы которых соединены с выходом дифференцирующей цепи 43, выход первого 51 и второго 52 счетчиков соединены соответственно с первым и вторым входами вычитающего устройства 53, выход первого 51 счетчика соединен со входом первого 54 интегратора, выход которого соединен со вторым входом сумматора 56, выход вычитающего устройства 53 через второй интегратор соединен с первым входом суммирующего устройства 56, выход которого является выходом канала 31 коррекции углового положения цели.
Предлагаемое устройство работает следующим образом.
В процессе полета ракеты к цели на этапе самонаведения головка самонаведения обеспечивает захват и автосопровождение цели, при этом информация об угловом положении цели от датчика азимута и угла места поступает на третий и четвертый входы блока 7 селекции цели.
В дальнейшем при сближении ракеты с целью входящий в состав взрывательного устройства радиометрический неконтактный датчик цели осуществляет фиксацию цели и, в случае реализации промаха, величина которого превышает расстояние между излучающей 4 и приемной 5 антеннами, определяет сторону пролета с дискретностью по экваториальному углу, определяемую количеством пар излучающих и принимающих антенн.
В дальнейшем при сближении ракеты с целью оптический неконтактный датчик цели осуществляет зондирование окружающего пространства на глубину, определяемую его чувствительностью. В случае реализации промаха, величина которого меньше предельного для оптического НДЦ, оптический сигнал, посланный его излучающим каналом 9б, отраженный от поверхности цели 11 и полученный принимающим каналом 10б, воспринимается принимающим блоком оптического НДЦ. Это также обеспечивает определение стороны пролета с дискретностью по экваториальному углу, определяемому количеством пар излучающих и принимающих блоков (фиг.1, 2).
Сигналы с выходов приемных антенн 5, 10б радиометрического и оптического датчиков поступают на первую и вторую группы блока 11 селекции цели (фиг.2). В случае совпадения по пространственному положению цели, определяемой, с одной стороны, блоком селекции цели, а с другой стороны - одним из выходов приемных антенн 5,10б радиометрического и оптического датчиков, происходит последовательная выдача сигналов на первый и второй входы электронного блока 6 расчета времени задержки подрыва (фиг.2).
Кроме того, сигналы с выходов датчика азимута и угла наклона поступают на первый и второй входы блока 8 коррекции углового положения цели, на третий, четвертый, пятый, шестой входы которого поступают сигналы с третьего, четвертого, пятого и шестого выходов блока 7 селекции цели.
В зависимости от сектора нахождения цели сигналы с двух выходов блока 8 коррекции углового положения цели, соответствующие прогнозируемому угловому положению цели по азимуту и углу места, поступают на третий и четвертый, или пятый и шестой, или седьмой и восьмой, или на девятый и десятый входы электронного блока 6 расчета времени задержки подрыва.
Электронный блок 6 расчета времени задержки подрыва обеспечивает формирование поля поражения в зависимости от сектора нахождения цели и прогнозируемого углового положения цели в данном секторе (фиг.2).
Осуществление пространственной селекции цели осуществляется следующим образом.
Сигналы с датчиков азимута и угла места головки самонаведения ракеты поступают на третий и четвертый входы блока 7 селекции цели и соответственно на входы первого 13 и одновременно второго 14 диодов, третьего 15 и одновременно четвертого 16 диодов, с выходов которых в зависимости от полярности сигналов поступают на первые входы соответственно второго 18 и третьего 19 элементов И, первого 17 и четвертого 20 элементов, вторые входы третьего 19 элементов И, четвертого 20, второго 18 и первого 17 элементов И.
С одной стороны, в зависимости от сектора нахождения цели (фиг.3) сигнал с выхода одного из элементов И (первого 17, второго 18, третьего 19 и четвертого 20), поступает на вторые входы соответственно первого 21 и пятого 25, или второго 22 и шестого 26, или третьего 23 и седьмого 27, или четвертого 24 и восьмого 28 ключей, с другой стороны, на первые входы одного из ключей (пятого 25, шестого 26, седьмого 27 и восьмого 28) в зависимости от стороны пролета цели сигнал поступает с одного из выходов приемной антенны 5 радиометрического датчика, кроме того, сигнал поступает на первые входы одного из ключей (первого 20, второго 21, третьего 22, четвертого 23) в зависимости от стороны пролета цели, сигнал поступает от одной из приемной антенны 10б оптического датчика цели (фиг.4).
В случае совпадения сектора и направления стороны пролета цели определяемым радиометрическим датчиком сигнал с выхода одного из ключей (пятого 25, шестого 26, седьмого 27 и восьмого 28) поступает на один из входов второго 30 элементов ИЛИ.
В случае совпадения сектора и направления стороны пролета цели, определяемым оптическим датчиком, сигнал с выхода одного из ключей (первого 21, второго 22, третьего 23 и четвертого 24) поступает на один из входов первого 29 элементов ИЛИ.
Сигналы с выходов второго 30 и первого 29 элементов И последовательно поступают на первый и второй входы электронного блока 6 расчета времени задержки подрыва.
Каждый из каналов (31, 32) коррекции углового положения цели обеспечивает учет динамики изменения углового положения цели на основе анализа значений угловой скорости и ускорения цели. Так как каждый канал работает идентично, рассмотрим работу одного из каналов (фиг.5).
С выхода датчика азимута сигнал поступает на вход канала 31 коррекции углового положения цели и соответственно одновременно на вход дифференцирующей цепи 43 и на первые входы n-пороговых устройств 41, на вторые входы которых поступает сигнал с выхода задатчика 42 сигналов.
С выхода дифференцирующей цепи сигнал поступает на вторые входы сдвигового регистра 45, первого 51 и второго 52 счетчиков, обеспечивая, тем самым, их обнуление.
В зависимости от величины углового сигнала с одного или несколько выходов пороговых устройств 41, через элемент ИЛИ 44 сигнал поступает на первый вход сдвигового регистра 45, с первого, второго, третьего и четвертого выходов сдвигового регистра 45 сигналы поступают соответственно на первые входы первых 46, 48 элементов И, НЕ или вторых 47, 49 элементов И, НЕ, на вторые входы первого 46 и второго 47 элементов И поступают сигналы с выхода генератора 50 импульсов, на третьи выходы которых поступают сигналы соответственно с выходов первого 48 и второго 49 элементов НЕ.
С выходов первого 46 и второго 47 элементов И сигналы поступают соответственно на первые входы первого 51 и второго 52 счетчиков, с выходов первого 51 и второго 52 счетчиков сигнал поступает соответственно на первый и второй входы вычитающего устройства 53 кроме того, с выхода первого 51 счетчика сигнал поступает на вход первого 54 интегратора, с выхода которого сигнал поступает на второй вход сумматора 56, на первый вход которого сигнал поступает с выхода вычитающего устройства 53, через второй интегратор 55.
С выхода сумматора 56 сигнал поступает на первые входы первого 33, второго 34, третьего 35 и четвертого 36 ключей, на вторые входы одного из которых в зависимости от сектора нахождения цели относительно продольной оси ракеты, поступают сигналы с одного из элементов И (17, 18, 19, 20).
С выходов одного из данных ключей (33, 34, 35, 36) сигнал поступает на один из входов электронного блока 6.
Таким образом, наряду с сектором нахождения цели определяется ее угловое положение в данном секторе, что в дальнейшем позволит электронному блоку 6 обеспечить концентрацию поля поражения боевой части в направлении на цель.
При получении сигналов электронный блок 6 по величинам относительной скорости и угла встречи производит расчет задержки времени подрыва, после реализации устройство 12 выдает команду на срабатывание предохранительно-исполнительного механизма 2б, радиально смещенного относительно оси заряда в сторону, противоположную стороне пролета, соответствующей экваториальному направлению передающего и приемного каналов 9б и 10б оптического многоканального датчика.
Таким образом, применение предлагаемого устройства позволит повысить помехозащищенность за счет осуществления пространственной селекции и учета прогнозируемого перемещения углового положения цели.
Источники изобретения
1. Патент РФ на изобретение № 2301958, кл. F42B 15/00, 27.06.2007.
Изобретение относится к оборонной технике. Технический результат - повышение помехозащищенности. Способ заключается в излучении двух действующих в разных диапазонах электромагнитного спектра неконтактных датчиков цели, в фиксации цели и определении стороны ее пролета на больших промахах, в фиксации цели и определении стороны ее пролета на малых промахах, формировании времени задержки на подрыв боевой части ракеты. При этом заранее определяют положение цели относительно оси ракеты на основе сравнения полярности сигналов от датчиков азимута и угла места головки самонаведения ракеты. Производят сравнивание положение цели, определяемой, с одной стороны, головкой самонаведения ракеты, а с другой стороны - радиолокационным датчиком цели и оптическим датчиком цели. Принимают решение об отсутствии помехи в случае совпадения пространственного положения цели. Определяют прогнозируемое угловое положение цели на основе учета динамики ее углового перемещения. Определяют динамику углового перемещения цели на основе значений угловой скорости и ускорения движения цели. Определяют значения угловой скорости и ускорения перемещений цели на основе сравнения угловых координат цели с заданными значениями. Принимают решение о формировании поля поражения боевой части ракеты в направлении пролета цели с учетом прогнозируемого ее углового перемещения. 2 н. и 3 з.п. ф-лы, 5 ил.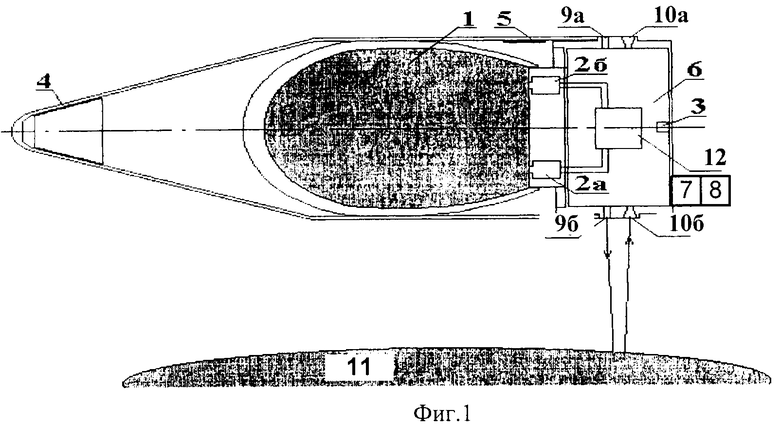
1. Способ управления характеристиками поля поражения осколочно-фугасной боевой части ракеты, включающий излучение двумя действующими в разных диапазонах электромагнитного спектра неконтактными датчиками цели, фиксацию цели и определение стороны ее пролета на больших промахах, фиксацию цели и определение стороны ее пролета на малых промахах, формирование времени задержки на подрыв боевой части ракеты, отличающийся тем, что определяют положение цели относительно оси ракеты на основе сравнения полярности сигналов от датчиков азимута и угла места головки самонаведения ракеты, сравнивают положение цели, определяемой с одной стороны головкой самонаведения ракеты, а с другой стороны - радиолокационным датчиком цели и оптическим датчиком цели, и при совпадении положений цели устанавливают факт отсутствия помехи, и определяют значения угловой скорости и ускорения перемещений цели на основе сравнения угловых координат цели с заданными значениями, определяют динамику углового перемещения цели на основе значений угловой скорости и ускорения движения цели, определяют прогнозируемое угловое положение цели на основе учета динамики ее углового перемещения и формируют поле поражения боевой части ракеты в направлении пролета цели с учетом ее прогнозируемого углового перемещения.
2. Устройство управления характеристиками поля поражения осколочно-фугасной боевой части ракеты направленно-кругового действия с разрывным зарядом и взрывательным устройством, включающим предохранительно-исполнительные механизмы, конечные узлы которых радиально смещены относительно оси заряда, содержащее контактный датчик цели, радиометрический неконтактный датчик цели, предназначенный для фиксации цели и определения стороны ее пролета на больших промахах, оптический неконтактный датчик цели, предназначенный для фиксации цели и определения стороны ее пролета на малых промахах, а также электронный блок расчета времени задержки подрыва с устройством, обеспечивающим подачу команды на срабатывание предохранительно-исполнительного механизма, отличающееся тем, что оно снабжено датчиком азимута и угла наклона головки самонаведения ракеты, блоком селекции цели, блоком коррекции углового положения цели, при этом первый, второй, третий, четвертый и пятый входы блока селекции цели соединены соответственно с входами приемных антенн радиометрического неконтактного датчика цели, входами передающих и приемных антенн оптического неконтактного датчика цели, датчика азимута и угла наклона головки самонаведения, первый, второй, третий, четвертый, пятый и шестой выходы которого соединены с первым и вторым входами электронного блока, третьим, четвертым, пятым и шестым входами блока коррекции углового положения цели, первый и второй входы
которого соединены с входами датчика азимута и угла места, а первый, второй, третий, четвертый, пятый, шестой, седьмой и восьмой выходы которого соединены соответственно с третьим, четвертым, пятым, шестым, седьмым, восьмым, девятым и десятым входами электронного блока.
3. Устройство по п.2, отличающееся тем, что блок селекции цели состоит из первого, второго, третьего и четвертого диода, первого, второго, третьего и четвертого элементов И, первого, второго, третьего, четвертого, пятого, шестого, седьмого и восьмого ключей, первого и второго элементов ИЛИ, при этом первый, второй, третий и четвертый входы блока селекции цели соединены с первыми входами пятого, шестого, седьмого, восьмого, первого, второго, третьего, четвертого ключей, одновременно - с входами первого и второго диодов, одновременно - с входами третьего и четвертого диодов, первый и третий диоды подключены по схеме обратного включения, второй и четвертый включены по схеме прямого включения, выходы первого, второго, третьего и четвертого диодов соединены соотвественно с первыми входами второго и третьего, первого и четвертого, вторым входом третьего, вторыми входами четвертого, второго и первого элементов И, выходы первого, второго, третьего и четвертого элементов И соединены со вторыми входами соотвественно первого и пятого, второго и шестого, третьего и седьмого, четвертого и восьмого ключей, выходы первого, второго, третьего и четвертого ключей соединены с входами первого элемента ИЛИ, выходы четвертого, пятого, шестого, седьмого и восьмого ключей соединены со входами второго элемента ИЛИ, выходы второго и первого элементов ИЛИ, первого, второго, третьего и четвертого элементов И являются соответственно первым, вторым, третьим, четвертым, пятым и шестым выходами блока селекции цели.
4. Устройство по п.2, отличающееся тем, что блок коррекции углового положения цели содержит канал коррекции углового положения цели по азимуту, канал коррекции углового положения цели по углу места, первый, второй, третий, четвертый, пятый, шестой, седьмой и восьмой ключи, причем первый и второй входы блока коррекции углового положения цели являются входами канала коррекции углового положения цели по азимуту, канала коррекции углового положения цели по углу места, выходы которых соединены соответственно с первыми входами первого, второго, третьего, четвертого, пятого, шестого, седьмого и восьмого ключей, вторые входы первого и пятого, второго и шестого, третьего и седьмого, четвертого и восьмого ключей соединены соответственно с третьим, четвертым, пятым и шестым входами блока селекции цели.
5. Устройство по п.4, отличающееся тем, что каждый из каналов коррекции углового положения цели по азимуту или углу места содержит n-пороговые устройства, задатчик сигналов, дифференцирующую цепь, элемент ИЛИ, сдвиговой регистр, первый и второй элементы И, первый и второй элементы НЕ, генератор импульсов, первый и второй счетчики, вычитающее устройство, первый и второй интеграторы, сумматор, при этом вход канала коррекции углового положения цели соединен одновременно с входом дифференцирующей цепи и с первыми входами n-пороговых устройств, вторые входы которых соединены с выходами задатчика сигналов, выходы пороговых устройств через элемент ИЛИ, соединен с первым входом сдвигового регистра, второй и третий входы которого соединены соответственно с выходом дифферейдирующей цепи и генератором импульсов, первый, второй, третий и четвертый выходы сдвигового регистра соединены соответственно с первыми входами первых элементов И, НЕ и вторых элементов И, НЕ, вторые входы первого и второго элементов И соединены с выходом генератора импульсов, а третьи выходы с выходами соответственно первого и второго элементов НЕ, выходы первого и второго элементов И соединены соответственно с первыми входами первого и второго счетчиков, вторые входы которых соединены с выходом дифференцирующей цепи, выход первого и второго счетчиков соединены соответственно с первым и вторым входами вычитающего устройства, выход первого счетчика соединен с входом первого интегратора, выход которого соединен со вторым входом сумматора, выход вычитающего устройства через второй интегратор соединен с первым входом суммирующего устройства, выход которого является выходом канала коррекции углового положения цели по азимуту или углу места.
| ОСКОЛОЧНО-ФУГАСНАЯ БОЕВАЯ ЧАСТЬ НАПРАВЛЕННО-КРУГОВОГО ДЕЙСТВИЯ | 2006 |
|
RU2301958C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2351889C2 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2292523C2 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ МОЩНОСТИ СИГНАЛА И МОЩНОСТИ ПОМЕХИ В ПОЛОСЕ ПРОПУСКАНИЯ КАНАЛА РАДИОПРИЕМНИКА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 2011 |
|
RU2472167C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ИНТЕРПРЕТАЦИИ ИСПЫТАНИЙ СВАБИРОВАНИЕМ С ИСПОЛЬЗОВАНИЕМ НЕЛИНЕЙНОЙ РЕГРЕССИИ | 2008 |
|
RU2474682C2 |

