Изобретение относится к области авиационных управляемых ракет и может использоваться для информационного обеспечения функционирования боевого снаряжения авиационной управляемой ракеты.
Известен способ функционирования информационно-вычислительной системы (ИВС) ракеты, заключающийся в подготовке ракеты на борту самолета-носителя к автономной работе путем подачи питающих напряжения из аппаратуры истребителя, осуществлении настройки приемников синхронизации и отраженного сигнала на частоту подсвета цели, осуществлении тестирования работоспособности всей аппаратуры ракеты, определении готовности информационно-вычислительной системы ракеты к работе по специальным сигналам контроля, поступающим в аппаратуру истребителя по цепям обратной связи, осуществлении настройки измерителей и вычислителя к сопровождению цели, выбранной для поражения по командам целеуказаний, осуществляется настройка измерителей и вычислителя к сопровождению цели, выбранной для поражения по командам целеуказаний путем поворота антенны головки самонаведения в направлении на цель, либо в упрежденную точку, в которой будет находиться цель в момент взятия ее на автосопровождение, осуществлении команд целеуказания по дальности Дцу и скорости сближения Vцу, осуществление команд целеуказаний по дальности Дцу определяется используемыми методами наведения и сигналом подсвета цели, при этом если в радиолокационной головке самонаведения используется непрерывный сигнал подсвета цели, то подается команда целеуказания по скорости сближения Vцу (доплеровской частоте), в соответствии с которой будут селектироваться радиосигналы только той цели, скорость сближения с которой соответствует скорости целеуказания, если в радиолокационной головке самонаведения используется импульсный сигнал подсвета цели, то в модуль обработки поступает команда целеуказания по дальности, в соответствии с которой приемник отраженного сигнала будет отпираться только на время прихода сигналов, отраженных от цели, отстоящей от истребителя на дальность Дцу, при квазинепрерывном сигнале подсвета цели подаются команды целеуказания и по дальности и по скорости, кроме того, команды целеуказания по дальности, скорости сближения и угловым скоростям линии визирования поступают в качестве начальных условий в вычислители, экстраполирующие параметры относительного движения ракеты и цели в автономном режиме работы информационно-вычислительной системы ракеты, предшествующем захвату цели на траектории, и в случае воздействия на нее радиопомех в измерении параметров движения цели и собственного движения ракеты, формировании оценки необходимых параметров относительного движения цели и абсолютного движения ракеты, выборе метода наведения ракеты на цель, наилучшего по какому-либо критерию для данных условий применения, вычислении для выбранного метода параметров рассогласования Δ1,2, характеризующих степень несоответствия действительных параметров движения ракеты их требуемым значениям, анализе помеховой обстановки и включении в зависимости от обстановки средств помехозащиты и нерадиотехнических измерителей, перенацеливания ракеты на постановщик помех, анализ помеховой обстановки проводится по энергетическим и частотным различиям сигналов, излучаемых постановщиком помех и отраженных от земли либо от цели, при принятии решения о принадлежности анализируемого сигнала к перехватываемой цели измерители РГС переходят к его автоматическому сопровождению по доплеровской частоте, выполняемому автоселектором скорости и по направлению, осуществляемому угломером, а радиолокационная головка самонаведения переводится в режим самонаведения и формирования сигнала подготовки и управления для радиовзрывателя
(Меркулов В.И., Лепин В.Н. Авиационные системы радиоуправления. - М.: Радио и связь, 1997 г. - с.201).
Известно устройство, в состав которого входят последовательно соединенные антенна и приемник сигнала синхронизации, антенна и приемник отраженного сигнала, модуль обработки информации и вычислитель параметров рассогласования, а также система автономных датчиков, усилитель мощности и привод антенны, где модуль обработки информации состоит из устройства поиска, обнаружения, селекции и анализа сигналов, канала оценивания дальности и скорости сближения, канала управления антенной, причем выход его механически связан с антенной отраженного сигнала, выход приемника отраженного сигнала соединен с первым входом модуля обработки информации, второй, третий, четвертый, пятый, шестой, седьмой входы которого соответственно соединены с первым выходом приемника сигналов синхронизации, первым и вторым выходом системы автономных датчиков, с выходом команд подготовки и целеуказания из аппаратуры истребителя, которые одновременно соединены с третьим входом вычислителя параметров рассогласования, с выходом вычислителя автономной системы, первым выходом усилителя мощности и привода антенны, второй выход которого механически соединен с антенной отраженного сигнала, при этом первый, второй третий, выходы модуля обработки информации соединены соответственно с входом сигналов контроля и обратной связи аппаратуры истребителя, первым и вторым входом вычислителя параметров рассогласования, кроме того, второй выход приемника синхронизации соединен со вторым входом приемника отраженного сигнала (Меркулов В.И., Лепин В.Н. Авиационные системы радиоуправления. - М.: Радио и связь 1997 г. - с.201).
Недостатком данных способа и устройства является осуществление подрыва боевой части ракеты без учета расположения одного из уязвимых отсеков воздушной цели - силовой установки.
Технической задачей изобретения является повышение эффективности боевого применения ракеты за счет осуществления подрыва боевой части ракеты относительно силовой установки воздушной цели.
Решение технической задачи достигается тем, что в способе функционирования информационно-вычислительной системы ракеты, заключающемся в подготовке ракеты на борту самолета-носителя к автономной работе путем подачи питающих напряжения из аппаратуры истребителя, осуществлении настройки приемников синхронизации и отраженного сигнала на частоту подсвета цели, осуществлении тестирования работоспособности всей аппаратуры ракеты, определении готовности информационно-вычислительной системы ракеты к работе по специальным сигналам контроля, поступающим в аппаратуру истребителя по цепям обратной связи, осуществлении настройки измерителей и вычислителя к сопровождению цели выбранной для поражения по командам целеуказаний путем поворота антенны головки самонаведения в направлении на цель, либо в упрежденную точку, в которой будет находиться цель в момент взятия ее на автосопровождение, осуществления команд целеуказания по дальности Дцу и скорости сближения Vцу, определяется используемыми методами наведения и сигналом подсвета цели, при этом если в радиолокационной головке самонаведения используется непрерывный сигнал подсвета цели, то подается команда целеуказания по скорости сближения Vцу (доплеровской частоте), в соответствии с которой будут селектироваться радиосигналы только той цели, скорость сближения с которой соответствует скорости целеуказания, если в радиолокационной головке самонаведения используется импульсный сигнал подсвета цели, то в модуль обработки поступает команда целеуказания по дальности, в соответствии с которой приемник отраженного сигнала будет отпираться только на время прихода сигналов, отраженных от цели, отстоящей от истребителя на дальность Дцу, при квазинепрерывном сигнале подсвета цели подаются команды целеуказания и по дальности и по скорости, кроме того, команды целеуказания по дальности, скорости сближения и угловым скоростям линии визирования поступают в качестве начальных условий в вычислители, экстраполирующие параметры относительного движения ракеты и цели в автономном режиме работы информационно-вычислительной системы ракеты, предшествующем захвату цели на траектории, и в случае воздействия на нее радиопомех, анализе помеховой обстановки и включении в зависимости от обстановки средств помехозащиты и нерадиотехнических измерителей, анализ помеховой обстановки проводится по энергетическим и частотным различиям сигналов излучаемых постановщиком помех и отраженных от земли либо от цели, при принятии решения о принадлежности анализируемого сигнала к перехватываемой цели измерители радиолокационной головки самонаведения переходят к его автоматическому сопровождению по доплеровской частоте, выполняемому автоселектором скорости и по направлению, осуществляемому угломером, а радиолокационная головка самонаведения переводится в режим самонаведения, в измерении параметров движения цели и собственного движения ракеты, формировании оценки необходимых параметров относительного движения цели и абсолютного движения ракеты, выборе метода наведения ракеты на цель, наилучшего по какому-либо критерию для данных условий применения, вычислении для выбранного метода параметров рассогласования Δ1,2, характеризующих степень несоответствия действительных параметров движения ракеты их требуемым значениям, формировании сигнала подготовки и управления для радиовзрывателя, дополнительно производят излучение и прием электромагнитных колебаний путем сканирования узким лучом в заданном секторе относительно оси ракеты при подлете ракеты к цели на расстояние, когда она становится протяженной, выделяют из спектра отраженного от цели сигнала полосу частот, соответствующую частотам колебаний элементов конструкции цели, определяют в этой полосе частот величину максимальной амплитуды отраженного сигнала, фиксируют излучение и прием электромагнитных колебаний в заданном относительно оси ракеты направлении, распознают элемент конструкции цели, имеющий максимальную амплитуду вибрации, по совмещению фиксированного луча электромагнитных колебаний с данным элементом конструкции, формируют сигнал на подрыв боевой части ракеты.
Предлагаемый способ реализуется в устройстве для функционирования информационно-вычислительной системы ракеты, содержащем последовательно соединенные антенну и приемник сигнала синхронизации, антенну и приемник отраженного сигнала, модуль обработки информации и вычислитель параметров рассогласования, а также систему автономных датчиков, усилитель мощности и привод антенны, где модуль обработки информации состоит из устройства поиска, обнаружения, селекции и анализа сигналов, канала оценивания дальности и скорости сближения, канала управления антенной, причем выход его механически связан с антенной отраженного сигнала, выход приемника отраженного сигнала соединен с первым входом модуля обработки информации, второй, третий, четвертый, пятый, шестой, седьмой входы которого соответственно соединены с первым выходом приемника сигналов синхронизации, первым и вторым выходом системы автономных датчиков, с выходом команд подготовки и целеуказания из аппаратуры истребителя, которые одновременно соединены с третьим входом вычислителя параметров рассогласования, с выходом вычислителя автономной системы, первым выходом усилителя мощности и привода антенны, второй выход которого механически соединен с антенной отраженного сигнала, при этом первый, второй третий, выходы модуля обработки информации соединены соответственно с входом сигналов контроля и обратной связи аппаратуры истребителя, первым и вторым входом вычислителя параметров рассогласования, кроме того, второй выход приемника синхронизации соединен со вторым входом приемника отраженного сигнала, отличающемся тем, что имеет последовательно соединенные третью антенну и блок обработки информации, вход которого соединен с вторым выходом модуля обработки информации, а выход является выходом команды на подрыв боевой части ракеты.
Кроме того, блок обработки информации, состоит из приемопередающего блока, устройства сканирования, цифроаналогового преобразователя, счетчика, генератора импульса, первого и второго элемента И, первого триггера, первого порогового устройства, первого задатчика сигналов, дифференцирующей цепи, фильтра, n вторых пороговых устройств, n вторых триггеров, n первых ключей, суммирующего устройства, второго ключ, третьего порогового устройства, второго задатчика сигналов, причем второй выход модуля обработки информации соединен с первым входом первого порогового устройства, второй вход который соединен с первым задатчиком сигналов, а выход порогового устройства соединен одновременно со входом дифференцирующей цепи и вторым входом первого элемента И, второй вход которой соединен со вторым выходом триггера, а третий вход соединен с выходом генератора импульсов, выход первого элемента И соединен со вторым входом счетчика, первый вход которого соединен со первым выходом триггера, а группа выходов соединена с группой входов цифроаналогового преобразователя, выход которого соединен со входом сканирующего устройства, первый выход-вход которого соединен с третьей антенной, а второй вход соединен с входом приемопередающего блока, выход которого соединен со входом фильтра, выход которого соединен с первыми входами n вторых пороговых устройств, вторые входы которых соединены с первыми выходами второго задатчика сигналов, а выходы - с первыми входами n триггеров, вторые входы которых соединены с выходом дифференцирующей цепи, выход которой соединен также с третьим входом счетчика и вторым входом первого триггера, выходы n первых триггеров соединены с первыми входами n первых ключей, вторые выходы которых соединены со вторыми выходами второго задатчиков сигналов, а выходы через сумматор - с первым входом второго ключа, второй вход которого соединен с выходом триггера, а выход - с первым входом второго порогового устройства, второй вход которого соединен с выходом фильтра, а выход является выходом блока формирования команды на подрыв боевой части ракеты.
Новыми признаками, обладающими существенными отличиями по способу, является следующая совокупность действий.
1. Производят излучение и прием электромагнитных колебаний путем сканирования узким лучом в заданном секторе относительно оси ракеты при подлете ракеты к цели на расстояние, когда она становиться протяженной.
2. Выделяют из спектра отраженного от цели сигнала полосу частот, соответствующую частотам колебаний элементов конструкции цели.
3. Определяют в этой полосе частот величину максимальной амплитуды отраженного сигнала.
4. Фиксируют излучение и прием электромагнитных колебаний в заданном относительно оси ракеты направлении.
5. Распознают элемент конструкции цели, имеющий максимальную амплитуду вибрации, по совмещению фиксированного луча электромагнитных колебаний с данным элементом конструкции.
6. Формируют сигнал на подрыв боевой части ракеты.
Существенными элементами по устройству являются последовательно соединенные третья антенна и блок обработки информации, которые состоит из приемопередающего блока, устройства сканирования, цифроаналогового преобразователя, счетчика, генератора импульса, первого и второго элемента И, первого триггера, первого порогового устройства, первого задатчика сигналов, дифференцирующей цепи, фильтра, n вторых пороговых устройств, n вторых триггеров, n первых ключей, суммирующего устройства, второго ключа, третьего порогового устройства, второго задатчика сигналов и связи между известными и новыми элементами.
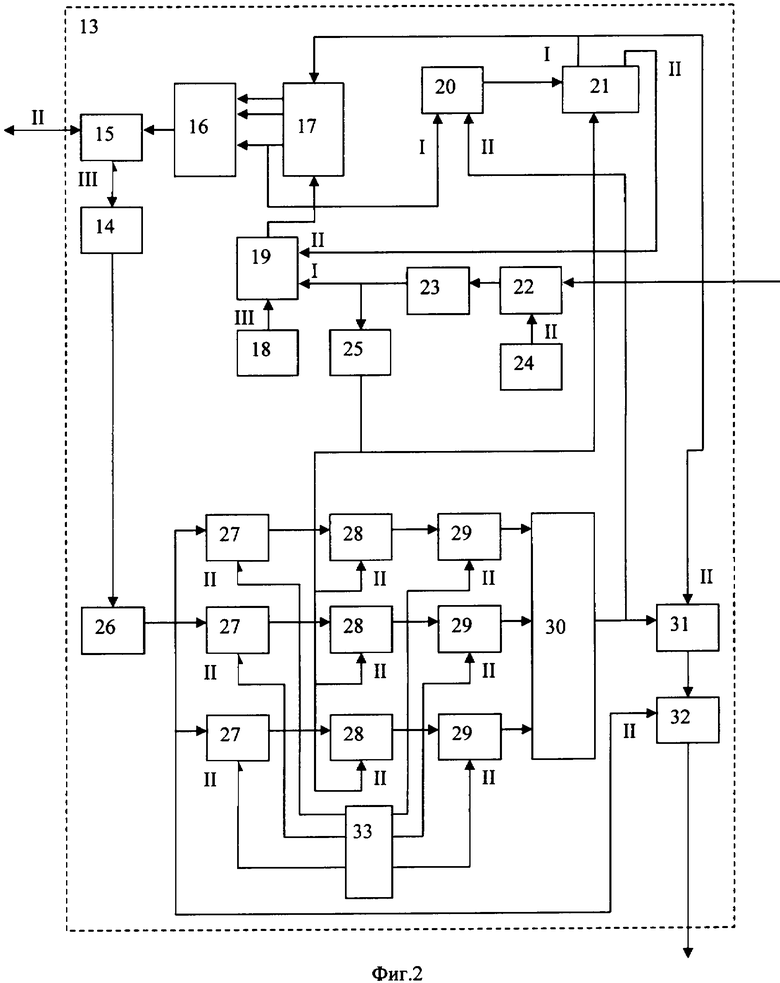
На фиг.1 приведена структурная схема информационно-вычислительной системы ракеты, на фиг.2 - блока обработки информации.
Устройство для функционирования информационно-вычислительной системы ракеты, содержит последовательно соединенные первую 1 антенну и приемник 2 сигнала синхронизации, вторую 3 антенну и приемник 4 отраженного сигнала, модуль 5 обработки информации и вычислитель 6 параметров рассогласования, а также систему 7 автономных датчиков, усилитель 8 мощности и привод антенны, где модуль 5 обработки информации состоит из устройства 9 поиска, обнаружения, селекции и анализа сигналов, канала 10 оценивания дальности и скорости сближения, канала 11 управления антенной, последовательно соединенные третью 12 антенну и блок 13 обработки информации, который состоит из приемопередающего блока 14, устройства 15 сканирования, цифроаналогового преобразователя 16, счетчика 17, генератора 18 импульса, первого 19 и второго 20 элемента И, первого 21 триггера, первого 22 порогового устройства, первого 23 задатчика сигналов, дифференцирующей цепи 24, фильтра 25, n вторых пороговых устройств 26, n вторых триггеров 27, n первых ключей 28, суммирующего устройства 29, второго ключа 30, третьего порогового устройства 31, второго задатчика сигналов 32, причем выход канала 11 управления антенной механически связан с антенной 3 отраженного сигнала, выход приемника 4 отраженного сигнала соединен с первым входом модуля 5 обработки информации, второй, третий, четвертый, пятый, шестой, седьмой входы которого соответственно соединены с первым выходом приемника 2 сигналов синхронизации, первым и вторым выходом системы 7 автономных датчиков, с выходом команд подготовки и целеуказания из аппаратуры истребителя, которые одновременно соединены с третьим входом вычислителя 6 параметров рассогласования, с выходом вычислителя автономной системы, первым выходом усилителя 8 мощности и привода антенны, второй выход которого механически соединен с антенной 3 отраженного сигнала, при этом первый, второй третий, выходы модуля 5 обработки информации соединены соответственно с входом сигналов контроля и обратной связи аппаратуры истребителя, первым и вторым входом вычислителя 6 параметров рассогласования, кроме того, второй выход приемника 3 синхронизации соединен со вторым входом приемника 4 отраженного сигнала, кроме того, второй выход модуля 5 обработки информации соединен с первым входом первого 22 порогового устройства, второй вход который соединен с выходом первого 23 задатчика сигналов, а выход порогового устройства 22 соединен одновременно со входом дифференцирующей цепи 24 и вторым входом первого 19 элемента И, второй вход которой соединен со вторым выходом первого 21 триггера, а третий вход соединен с выходом генератора 18 импульсов, выход первого 19 элемента И соединен со вторым входом счетчика 17, первый вход которого соединен со первым выходом первого 21 триггера, а группа выходов соединена с группой входов цифроаналогового преобразователя 16, выход которого соединен со входом сканирующего устройства 15, первый выход которого соединен с третьей 12 антенной, а второй выход соединен с входом приемопередающего блока 14, выход которого соединен со входом фильтра 25, выход которого соединен с первыми входами n вторых 26 пороговых устройств, вторые входы которых соединены с первыми выходами второго 32 задатчика сигналов, а выходы - с первыми входами n вторых 27 триггеров, вторые входы которых соединены с выходом дифференцирующей цепи 24, выход которой соединен также с третьим входом счетчика 17 и вторым входом первого 21 триггера, выходы n вторых 27 триггеров соединены с первыми входами n первых 28 ключей, вторые выходы которых соединены со вторыми выходами второго 32 задатчиков сигналов, а выходы через сумматор 29 соединены с первым входом второго 30 ключа, второй вход которого соединен с выходом первого 21 триггера, а выход - с первым входом второго 31 порогового устройства, второй вход которого соединен с выходом фильтра 24, а выход является выходом блока 13 обработки информации.
Устройство работает следующим образом.
Функционирование ИВС ракеты «в-в» осуществляется в следующих режимах: целеуказание, поиск и обнаружение цели при захвате ее на траектории, формирование параметра рассогласования и формирование команды на подрыв боевой части ракеты.
Первые два режима являются подготовительными, а собственно самонаведение и формирование команды на подрыв боевой части ракеты осуществляется в третьем режиме. В режиме целеуказания (ЦУ) из аппаратуры истребителя в модуль 5 обработки информации поступают команды подготовки ракеты к работе и команды ЦУ (фиг.1). По командам подготовки подаются питающие напряжения в ИВС, настраиваются приемники 2, 4 каналов синхронизации и отраженного сигнала на частоту сигнала подсвета цели (СПЦ) и тестируются работоспособность всей аппаратуры ракеты. По командам ЦУ измерители и вычислители подготавливаются к сопровождению цели, выбранной для поражения. В соответствии с этими командами антенна 3 головки самонаведения разворачивается в направлении на цель, либо в упрежденную точку, в которой будет находиться цель в момент взятия ее на автосопровождение. Наличие команд целеуказания по дальности Дцу и скорости сближения Vцу определяется используемыми методом наведения и сигналом подсвета цели.
Если в радиолокационной головке самонаведения (РГС) используется непрерывный СПЦ, то подается команда ЦУ по скорости сближения Vцу (доплеровской частоте), в соответствии с которой будут селектироваться радиосигналы только той цели, скорость сближения с которой соответствует скорости целеуказания. Если в РГС используется импульсный СПЦ, то в модуль 5 обработки поступает команда ЦУ по дальности, в соответствии с которым приемник отраженного сигнала будет отпираться только на время прихода сигналов, отраженных от цели, отстоящей от истребителя на нужную дальность Дцу. При квазинепрерывном СПЦ подаются команды ЦУ и по дальности и по скорости. Кроме того, команды ЦУ по дальности, скорости сближения и угловым скоростям линии визирования поступают в качестве начальных условий в вычислители, экстраполирующие параметры относительного движения ракеты и цели в автономном режиме работы ИВС, предшествующем захвату цели на траектории, и в случае воздействия на нее радиопомех. Готовность ИВС к работе контролируется по специальным сигналом контроля, поступающим в аппаратуру истребителя по цепям обратной связи (фиг.1).
Необходимо отметить, что в зависимости от вида сигнала подсвета цели (СПЦ) поиск и селекция сигнала, отраженного от перехватываемой цели, выполняются по-разному.
После совпадения во времени следящих полустробов дальномера и импульса uц, отраженного от цели, поиск прекращается и решается задача обнаружения. В процессе решения этой задачи осуществляется накопление сигналов, имеющее целью повышение вероятности правильного обнаружения.
Если принимается решение о принадлежности обнаруженного сигнала перехватываемой цели, то измерители ИВС переходят в режим автоматического сопровождения цели по дальности и направлению, а ИВС переводится в режим формирования параметра рассогласования (самонаведения) и формирования команды на подрыв боевой части ракеты.
В этом режиме в дальномерном канале 10 формируются оценки  а в угломерном канале 11 оценки углов
а в угломерном канале 11 оценки углов  и приращений угловых скоростей
и приращений угловых скоростей 
Оценки  и
и  а также рассчитываемые вычислителем автономной системы (АС) оценки
а также рассчитываемые вычислителем автономной системы (АС) оценки  используются для формирования параметра рассогласования Δc1,2=N0Vсб(ω1,2+Δω1,2)-j1,2, где N0 - навигационный параметр, ω1,2 - угловые скорости линии визирования, рассчитанные при условии, что цель не маневрирует, Δ1,2 - приращения угловой скорости визирования, вызванные маневром цели, j1,2 - поперечные ускорения ракеты.
используются для формирования параметра рассогласования Δc1,2=N0Vсб(ω1,2+Δω1,2)-j1,2, где N0 - навигационный параметр, ω1,2 - угловые скорости линии визирования, рассчитанные при условии, что цель не маневрирует, Δ1,2 - приращения угловой скорости визирования, вызванные маневром цели, j1,2 - поперечные ускорения ракеты.
Оценки  используются для вычисления параметров рассогласования Δy1,2=Кф(ϕ1,2+ϕдоп1,2) при методе наведения с постоянным углом упреждения, где Кф - постоянный коэффициент, ϕ1,2 - бортовые пеленги цели в плоскостях управления, ϕдоп.1,2 - допустимые углы визирования в этих плоскостях, при которых маневр цели не приводит к срыву ее сопровождения по направлению.
используются для вычисления параметров рассогласования Δy1,2=Кф(ϕ1,2+ϕдоп1,2) при методе наведения с постоянным углом упреждения, где Кф - постоянный коэффициент, ϕ1,2 - бортовые пеленги цели в плоскостях управления, ϕдоп.1,2 - допустимые углы визирования в этих плоскостях, при которых маневр цели не приводит к срыву ее сопровождения по направлению.
Если ракета наводится по алгоритму в виде выражения:
 в горизонтальной плоскости и
в горизонтальной плоскости и
 в вертикальной,
в вертикальной,
где Д0 - значения дальности на момент начала самонаведения, Дк - дальность окончания самонаведения,  - оценка угловой скорости линии визирования,
- оценка угловой скорости линии визирования,  - оценка бокового ускорения цели,
- оценка бокового ускорения цели,  - оценка бокового ускорения объекта управления в горизонтальной плоскости,
- оценка бокового ускорения объекта управления в горизонтальной плоскости,  - оценка угловой скорости линии визирования,
- оценка угловой скорости линии визирования,  - оценка бокового ускорения цели,
- оценка бокового ускорения цели,  - оценка бокового ускорения объекта управления в вертикальной плоскости, то в угломерном канале еще формируются оценки
- оценка бокового ускорения объекта управления в вертикальной плоскости, то в угломерном канале еще формируются оценки  - поперечных ускорений цели.
- поперечных ускорений цели.
Знание оценки  позволяет селектировать по дальности импульсы, отраженные от перехватываемой цели, путем отпирания приемника 4 отраженных сигналов только на время их прихода. Эта особенность позволяет повысить помехозащищенность ИВС в целом.
позволяет селектировать по дальности импульсы, отраженные от перехватываемой цели, путем отпирания приемника 4 отраженных сигналов только на время их прихода. Эта особенность позволяет повысить помехозащищенность ИВС в целом.
Начало отсчета для оценивания дальности задают импульсы СПЦ, поступающие в приемник 2 сигналов синхронизации через антенну 1.
По пространству (направлению) цель селектируется за счет направленных свойств антенны 3 путем ее поворота в направлении, определяемом оценками углов 
При непрерывном СПЦ для селекции сигналов, отраженных от цели, используется доплеровская частота Fрц, пропорциональная скорости сближения ракеты с целью. В полуактивной РГС частота Fрц выделяется как разность частот двух сигналов. Один из них, отраженный от цели, принятый антенной 3 Аос и усиленный в приемнике 4 отраженных сигналов, содержит доплеровское смещение частоты, обусловленное скоростью сближения истребителя с целью и цели с ракетой. Второй сигнал uc, принятый антенной 1 и усиленной приемником 2, содержит доплеровское смещение частоты, вызываемое скоростью удаления ракеты от истребителя. После вычитания частот сигналов, поступающих в приемники 4, 2 отраженных и синхронизирующих сигналов, формируется сигнал, поиск и селекция которого выполняется в модуле 5 обработки. При дальности Дп≤Дз поиск этого сигнала осуществляется относительно частоты Fцу=2Vцу/λ, которая устанавливается командой целеуказания Vцу по скорости, измеренной в БРЛС истребителя. Если Дп>Дз, поиск производится относительно частоты  где
где  - оценка скорости, экстраполированной в автономной системе наведения ракеты. Поиск осуществляется путем изменения по линейному закону частоты специального гетеродина. При некотором значении этой частоты сигнал промежуточной частоты приемника отраженных сигналов (ПРМОС) попадает в узкополосный фильтр, после чего поиск прекращается и начинается этап обнаружения и анализа.
- оценка скорости, экстраполированной в автономной системе наведения ракеты. Поиск осуществляется путем изменения по линейному закону частоты специального гетеродина. При некотором значении этой частоты сигнал промежуточной частоты приемника отраженных сигналов (ПРМОС) попадает в узкополосный фильтр, после чего поиск прекращается и начинается этап обнаружения и анализа.
При принятии решения о принадлежности анализируемого сигнала к перехватываемой цели измерители РГС переходят к его автоматическому сопровождению по доплеровской частоте, выполняемому автоселектором скорости (каналом 10 оценивания Vсб), и по направлению, осуществляемому угломером, а РГС переводится в режим самонаведения.
Оценка, формируемая автоселектором скорости на основе измерения доплеровской частоты Fрц, поступает в вычислитель 6 параметров рассогласования для реализации методов наведения. Угломерный канал 11 при непрерывном СПЦ функционирует так же, как и при импульсном сигнале с НЧП.
При использовании квазинепрерывного сигнала поиск и селекция цели производится как по дальности, так и по доплеровской частоте. После перехода к автоматическому сопровождению цели по дальности, скорости и направлению устройства оценивания Д и Vсб формируют оценки дальности  и скорости
и скорости  При этом Д оценивается по времени запаздывания отраженного сигнала, а скорость - по частоте Fрц. Наличие информации о дальности позволяет повысить помехозащищенность РЭСУ за счет отпирания приемника только на время прихода сигналов, отраженных от цели.
При этом Д оценивается по времени запаздывания отраженного сигнала, а скорость - по частоте Fрц. Наличие информации о дальности позволяет повысить помехозащищенность РЭСУ за счет отпирания приемника только на время прихода сигналов, отраженных от цели.
При квазинепрерывном СПЦ необходимо устранять неоднозначность отсчета дальности, поскольку время запаздывания отраженного сигнала может превышать период повторения импульсов СПЦ. Если невозможно обеспечить однозначность отсчета, дальность не оценивается и слежение по ней не реализуется. В такой ситуации отраженный сигнал селектируется не по дальности, а по периоду повторения, что позволяет также обеспечить стробирование приемника на время прихода отраженных импульсов. Целесообразность такого приема обусловлена тем, что при вычислении параметров рассогласования не требуется знания текущей дальности. Принцип работы угломерного канала 11 остается тем же, что и при использовании СПЦ других типов.
Входящие в систему 7 автономных датчиков измерители параметров собственного движения (см. фиг.1), к которым относятся прежде всего акселерометры и гироскопы, выдают информацию об продольном и поперечных ускорениях jх и j1,2 и углах тангажа ϑ и рысканья ψ. На основе измерения продольного jх и поперечных j1,2 ускорений в вычислителе автономной системы формируются оценки  используемые при вычислении параметров рассогласования. Гироскопические датчики позволяют развязать антенну 3 РГС от угловых колебаний ракеты, что повышает точность и устойчивость сопровождения целей по направлению.
используемые при вычислении параметров рассогласования. Гироскопические датчики позволяют развязать антенну 3 РГС от угловых колебаний ракеты, что повышает точность и устойчивость сопровождения целей по направлению.
Определение силовой установки на теле цели осуществляется на основе сканирования цели узким электромагнитным лучом при подходе к ракеты к цели на заданное расстояние.
Со второго выхода модуля 5 обработки информации сигнал, пропорциональный дальности, поступает на первый вход первого 22 порогового устройства, на второй вход которого поступает сигнал с выхода первого 23 задатчика сигналов.
В случае снижения уровня сигнала до заданного уровня с выхода порогового устройства 22 снимается сигнал и на выходе элемента И-НЕ возникает сигнал, который поступает одновременно на вход дифференцирующей цепи 24 и первый вход первого 19 элемента И.
С выхода дифференцирующей цепи 24 сигнал «обнуления» поступает на третий вход счетчика 17, второй вход первого 21 триггера, вторые входы n - вторых 27 триггеров, обеспечивая готовность данных элементов к работе.
На второй и третий вход элемента И поступают сигналы соответственно со второго выхода первого 21 триггера и генератора 18 импульсов.
С выхода первого 19 элемента И сигнал поступает на второй вход счетчика 17, на первый вход которого поступает сигнал с первого выхода первого 21 триггера.
С группы выходов счетчика 17 через цифроаналоговый преобразователь 16, первый выход сканирующего устройства 15 сигнал поступает на вход третьей 12 антенны, которая обеспечивает излучение электромагнитной энергии в пространство через второй выход сканирующего устройства с выхода приемопередающего блока 14.
Отраженный от цели сигнал через третью антенну, сканирующее устройство, приемопередающее устройство, фильтр 25 поступает на первые входы n - вторых 26 пороговых устройств, на вторые входы которых поступает сигнал с первых выходов второго 32 задатчика сигналов.
В случае превышения уровня отраженного сигнала происходит срабатывание n - вторых 27 триггеров, с выходов n - вторых 27 триггеров сигнал поступает на первые входы n - первых 28 ключей, на вторые выходы которых поступает сигнал с выходов второго 32 задатчика сигналов, с выходов ключей сигнал через сумматор 29 поступает на первый вход второго 30 ключа, на второй вход которого поступает сигнал с выхода первого 21 триггера, с выхода ключа сигнал поступает на первый вход второго 31 порогового устройства, на второй вход которого поступает сигнал с выхода фильтра 24, а выход является выходом блока 13 обработки информации.
Таким образом, наряду с наведением ракеты на цель обеспечивается определения местонахождения на теле цели силовой установки и формируется команда на подрыв боевой части ракеты относительно жизненноважного агрегата.
Источники информации
1. Меркулов В.И., Лепин В.Н. Авиационные системы радиоуправления. М.: Радио и связь, 1997 г. - c.201 (прототип).
Изобретение относится к области авиационных управляемых ракет и может использоваться для информационного обеспечения функционирования боевого снаряжения ракеты. Технический результат - повышение информативности. Сущность изобретения заключается в подготовке ракеты на борту самолета-носителя к автономной работе путем подачи питающих напряжении из аппаратуры истребителя, в измерении параметров движения цели и собственного движения ракеты, формировании оценки необходимых параметров относительного движения цели и абсолютного движения ракеты, выборе метода наведения ракеты на цель, наилучшего по какому-либо критерию для данных условий применения, вычислении для выбранного метода параметров рассогласования, характеризующих степень несоответствия действительных параметров движения ракеты их требуемым значениям, формировании сигнала подготовки и управления для радиовзрывателя. Также осуществляют излучение и прием электромагнитных колебаний путем сканирования узким лучом в заданном секторе, относительно оси ракеты. При подлете ракеты к цели на расстояние, когда она становиться размерной, выделяют из спектра отраженного от цели сигнала полосы частот, соответствующие частотам колебаний элементов конструкции цели, определяют в этой полосе частот величины максимальной амплитуды отраженного сигнала. Далее фиксируют излучение и прием электромагнитных колебаний в заданном относительно оси ракеты направлении, распознают элемент конструкции цели, имеющий максимальную амплитуду вибрации. При совмещении фиксированного луча электромагнитных колебаний с данным элементом конструкции формируют сигнал на подрыв боевой части ракеты по сигналу положения цели относительно оси ракеты и сигналу опознавания. 2 н. и 5 з.п. ф-лы, 2 ил.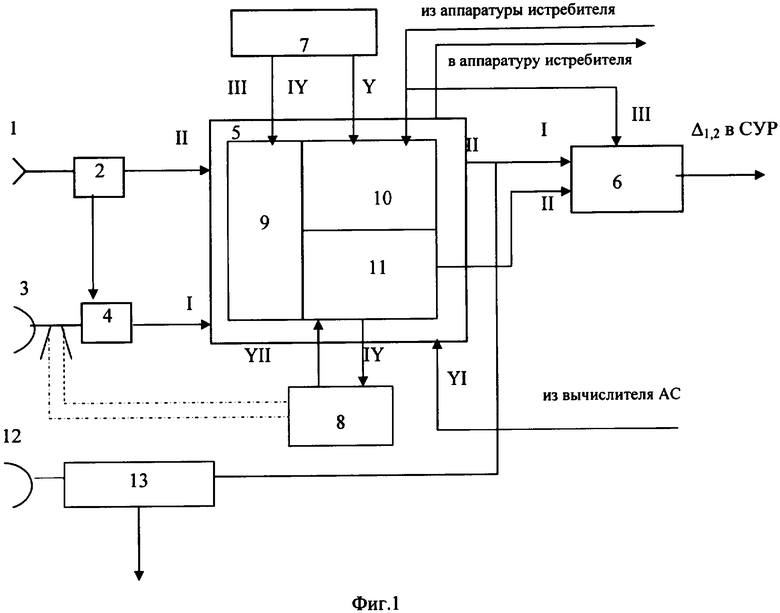
| МЕРКУЛОВ В.И., ЛЕПИН В.Н | |||
| Авиационные системы радиоуправления | |||
| - М.: Радио и связь, 1997, с.201-208 | |||
| СПОСОБ ВЗВЕДЕНИЯ БОРТОВЫХ СИСТЕМ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2191984C2 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 2001 |
|
RU2199715C2 |
| Система управления фрикционными гидромуфтами двухпоточной коробки передач транспортного средства | 1988 |
|
SU1532344A1 |
| DE 3310403 A1, 20.09.1984 | |||
| СПОСОБ ГИБРИДНОЙ ЛАЗЕРНО-ДУГОВОЙ СВАРКИ ДЕТАЛЕЙ ИЗ АЛИТИРОВАННОЙ СТАЛИ С ПРОВОЛОКОЙ, СОДЕРЖАЩЕЙ ОБРАЗУЮЩИЕ ГАММУ-ФАЗУ ЭЛЕМЕНТЫ, И ГАЗОМ, СОДЕРЖАЩИМ МЕНЕЕ 10% АЗОТА ИЛИ КИСЛОРОДА | 2011 |
|
RU2588978C2 |

