Изобретение относится к устройствам для измерения дальности до заданного объекта на фоне реального рельефа и при наличии пассивных помех и предназначено для использования в офицерских, танковых и других дальномерах, работающих в условиях сложного рельефа местности.
Известен оптический дальномер (2000.08.27 RU 2155322), содержащий узел сканирования луча, лазер, модулятор, синхронизирующий генератор, фотоприемный элемент, усилитель, пороговое устройство, блок измерения временных интервалов и индикатор. Устройство предназначено для измерения расстояния до определенного объекта на фоне реального рельефа.
Недостатком данного оптического дальномера являются его значительные габариты, определяемые углом сканирования луча, и невозможность использования в портативных и бортовых системах.
Наиболее близким решением, принятым за прототип, является импульсный дальномер (Б.Ф. Федоров, Лазерные системы летательных аппаратов, М. - 1979, стр. 136), состоящий из приемной и излучающей оптических систем, синхронизирующего генератора, излучателя, фотоприемного устройства, блока измерения времени запаздывания, индикатора дальности.
Недостатком данного прибора является невысокая достоверность измерения расстояния до заданного объекта в реальных условиях при попадании в диаграмму направленности местных предметов (рельеф, растительность, клубы дыма и т.д.) или других объектов. С помощью данного импульсного дальномера невозможно определение таких параметров объектов, как скорость, форма, габаритные размеры.
Техническая задача заключается в создании системы с повышенной достоверностью определения дальности до заданных объектов за счет селекции объектов по конкретным признакам (движение с определенной скоростью, размеры, форма и т.д.).
Поставленная техническая задача решается тем, что в известное устройство измерения дальности, содержащее излучающую и приемную оптические системы, синхронизирующий генератор, излучатель, фотоприемное устройство, блок измерения времени запаздывания, индикатор дальности, между блоком измерения времени запаздывания и индикатором дальности введено устройство трехмерной обработки и блок управления признаками объекта, при этом выход блока управления признаками объекта соединен с входом устройства трехмерной обработки (селекция объектов по заданным признакам обеспечивает повышенную достоверность измерения дальности и реализуется благодаря использованию N-канального фотоприемного устройства и N-канального блока измерения времени запаздывания), при этом выход синхронизирующего генератора соединен с (N+1) входом устройства трехмерной обработки, выход блока управления признаками объекта соединен с (N+2) входом устройства трехмерной обработки, N выходов блока измерения времени запаздывания соединены с N входами устройства трехмерной обработки, первый выход устройства трехмерной обработки соединен шиной с входом индикатора дальности, а второй выход (для повышения информативности дальномера) соединен шиной с входом индикатора скорости и габаритов объекта, соответственно, при этом каждый канал фотоприемного устройства содержит последовательно соединенные фотоприемный элемент и усилитель, а каждый канал блока измерения времени запаздывания содержит последовательно соединенные пороговое устройство и измеритель временных интервалов.
Технический результат заявляемого технического решения состоит в создании систем нового поколения:
- Высокоинформативные дальномеры;
- Измерители высоты до неровных поверхностей;
- Импульсные системы для распознавания объектов;
- Системы обнаружения малоразмерных целей;
- Системы наведения и коррекции траектории.
В основе построения предложенного устройства лежит получение и анализ трехмерного импульсного отклика при зондировании пространства коротким лазерным импульсом.
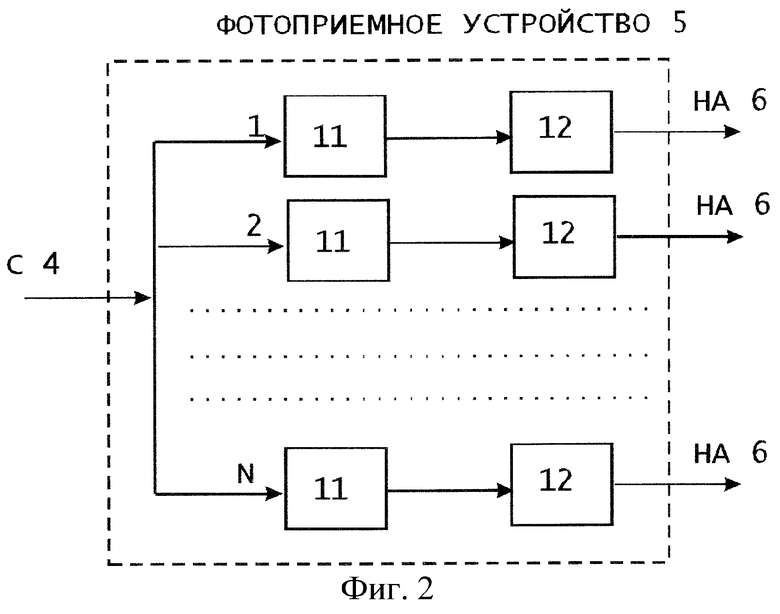
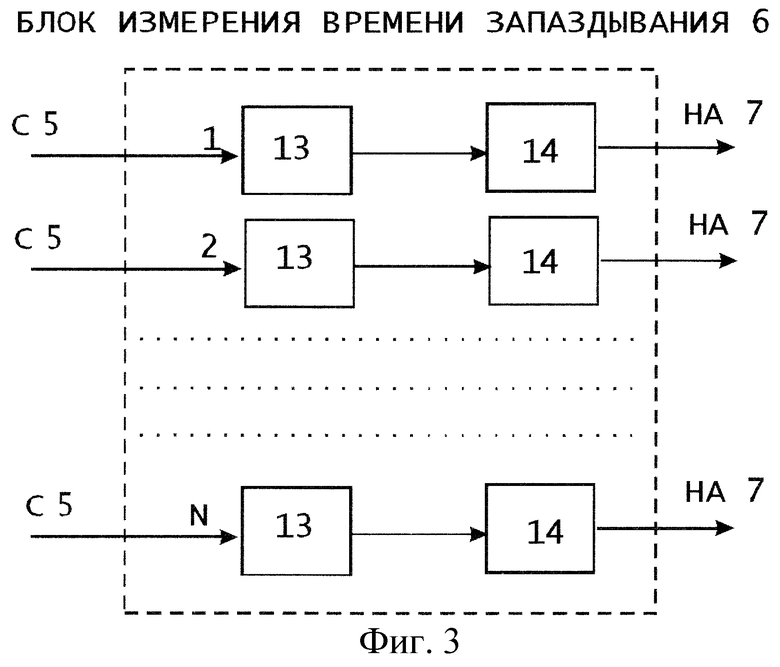
Сущность изобретения поясняется чертежами, где на фиг. 1 изображена структурная схема высокоинформативного распознающего дальномера, на фиг. 2 - структурная схема N-канального фотоприемного устройства, а на фиг. 3 - структурная схема блока измерения времени запаздывания.
Дальномер состоит из излучающей оптической системы 1, излучателя 2 (если излучатель - твердотельный лазер, то включающий в себя модулятор, а если излучатель - полупроводниковый лазер, то содержащий генератор накачки), синхронизирующего генератора 3, приемной оптической системы 4, фотоприемного устройства 5, блока измерения времени запаздывания 6, устройства трехмерной обработки 7, блока управления признаками объекта 8, индикатора дальности 9, индикатора скорости и габаритов 10. Фотоприемное устройство 5 состоит из N фотоприемных трактов, каждый из которых включает в себя фотоприемный элемент 11, усилитель 12. Блок измерения времени запаздывания 6 содержит N каналов, каждый из которых состоит из порогового устройства 13, измерителя временных интервалов 14.
Устройство работает следующим образом.
Синхронизирующий генератор 3 вырабатывает тактовые импульсы и задает частоту следования сигналов излучателя 2, который формирует излученные сигналы по мощности и длительности, в определенном угловом секторе (например, 1°, 3°, 5° или 10°), определяемом излучающей оптической системой 1. Излученный сигнал по мере прохождения пространства отражается от всех объектов, находящихся в этом секторе (диаграмме), и после прохождения пространства в обратном направлении через приемную оптическую систему 4 как совокупность принятых сигналов поступают на N-канальное фотоприемное устройство 5, в каждом канале которого соответствующая доля оптического сигнала преобразуется с помощью фотоприемного элемента 11 в электрический сигнал, который усиливается усилителем 12. Далее совокупность электрических сигналов поступает на блок измерения времени запаздывания 6, а именно на входы N пороговых устройств 13, где происходит сравнение амплитуды сигналов с заданным порогом, который превышает уровень шумов в n раз (n=5÷20), сигналы, которые превышают этот порог, поступают на входы N измерителей временных интервалов 14 и далее на устройство трехмерной обработки 7, алгоритм работы которого задается управляющими сигналами с блока управления признаками объекта 8. С первого и второго выходов устройства трехмерной обработки 7 сигналы дальности и скорости - габаритов в цифровом или аналоговом виде поступают соответственно на индикатор дальности 9 и индикатор скорости и габаритов 10. Блок управления признаками объекта 8 по команде оператора формирует управляющие сигналы для устройства трехмерной обработки 7, соответствующие признакам заданного объекта. Например, может задаваться диапазон скоростей 30-40 км/ч или высота объекта 2-2,5 м (грузовой автомобиль). При N≥64 признаком объекта может быть его форма, наличие прямолинейных граней или прямоугольных контуров.
Изготовлен экспериментальный образец высокоинформативного распознающего дальномера, который подтвердил заявляемые преимущества. В качестве излучателя 2 применен инжекционный лазер (импульсная мощность 500 Вт, длительность импульса 2-5 нс), N-канальное фотоприемное устройство 5 содержит 76-анодный микроканальный фотоэлектронный умножитель.
| название | год | авторы | номер документа |
|---|---|---|---|
| АМПЛИТУДНО-ФАЗОВЫЙ СПОСОБ ОБНАРУЖЕНИЯ МЕТАЛЛОСОДЕРЖАЩИХ ОБЪЕКТОВ И РАДИОЧАСТОТНЫЙ ИЛИ СВЧ-МЕТАЛЛОДЕТЕКТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2276391C2 |
| РАДИОЧАСТОТНЫЙ ОБНАРУЖИТЕЛЬ МЕТАЛЛИЧЕСКИХ ТЕЛ | 2003 |
|
RU2239850C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 1998 |
|
RU2135954C1 |
| ЛАЗЕРНЫЙ ИМПУЛЬСНЫЙ ДАЛЬНОМЕР | 2004 |
|
RU2288449C2 |
| ОПТИЧЕСКИЙ ПРИБОР РАЗВЕДКИ | 2006 |
|
RU2324896C1 |
| Лазерный дальномер с сумматором зондирующих пучков | 2016 |
|
RU2621476C1 |
| ОПТИКО-ЛАЗЕРНАЯ СИСТЕМА ДЛЯ ПРИЦЕЛИВАНИЯ И ДАЛЬНОМЕТРИРОВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1998 |
|
RU2123165C1 |
| КОМБИНИРОВАННЫЙ ОПТИКО-ЭЛЕКТРОННЫЙ ПРИБОР | 2011 |
|
RU2497062C2 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2013 |
|
RU2535240C1 |
| Лазерный дальномер с оптическим сумматором излучения | 2016 |
|
RU2620768C1 |
Использование: для измерения дальности до заданного объекта на фоне реального рельефа и при наличии пассивных помех. Высокоинформативный распознающий дальномер содержит излучающую оптическую систему, излучатель, синхронизирующий генератор, приемную оптическую систему, фотоприемное устройство, блок измерения времени запаздывания, устройство трехмерной обработки, блок управления признаками объекта, индикатор дальности, индикатор скорости и габаритов. Фотоприемное устройство и блок измерения времени запаздывания выполнены N-канальными. Выход синхронизирующего генератора соединен с N+1 входом устройства трехмерной обработки. Выход блока управления признаками объекта соединен с N+2 входом устройства трехмерной обработки. N выходов блока измерения времени запаздывания соединены с N входами устройства трехмерной обработки. Первый выход устройства трехмерной обработки соединен шиной с входом индикатора дальности, а второй вызод соединен шиной с входом индикатора скорости и габаритов объекта. Каждый канал фотоприемного утройства содержит последовательно соединенные фоториемный элемент и усилитель. Технический результат - создание системы с повышенной достоверностью определения дальности до заданных объектов за счет селекции объектов по конкретным признакам (движение с определенной скоростью, размеры, форма и т.д.). 3 ил.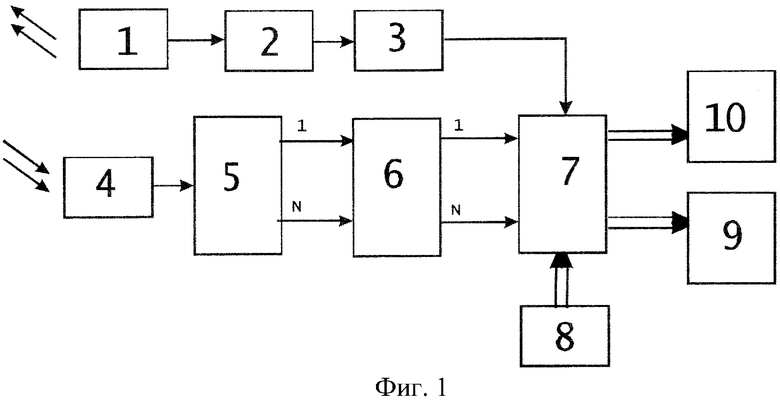
Высокоинформативный распознающий дальномер, состоящий из последовательно соединенных излучающей оптической системы, излучателя, синхронизирующего генератора, а также приемной оптической системы, фотоприемного устройства, блока измерения времени запаздывания и индикатора дальности, отличающийся тем, что в него дополнительно введены устройство трехмерной обработки, блок управления признаками объекта, индикатор скорости и габаритов объекта, фотоприемное устройство и блок измерения времени запаздывания выполнены N-канальными, при этом выход синхронизирующего генератора соединен с (N+1)-м входом устройства трехмерной обработки, выход блока управления признаками объекта соединен со (N+2)-м входом устройства трехмерной обработки, N выходов блока измерения времени запаздывания соединены с N входами устройства трехмерной обработки, первый выход устройства трехмерной обработки соединен шиной с входом индикатора дальности, а второй выход соединен шиной с входом индикатора скорости и габаритов объекта соответственно, при этом каждый канал фотоприемного устройства содержит последовательно соединенные фотоприемный элемент и усилитель, а каждый канал блока измерения времени запаздывания содержит последовательно соединенные пороговое устройство и измеритель временных интервалов.
| ОПТИЧЕСКИЙ ДАЛЬНОМЕР | 1999 |
|
RU2155322C1 |
| RU 2058525C1, 20.04.1996 | |||
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 1994 |
|
RU2082090C1 |
| US 4606630, 19.08.1986 | |||
| US 6456367, 24.09.2002. | |||

