Изобретение относится к области оптико-электронного приборостроения, в частности оптическим прицельным приспособлениям, и может быть использовано для управления движущимися объектами с телеориентацией в луче лазера, при управлении, посадке и стыковке летательных аппаратов, проводке судов через узости или створы мостов, дистанционном управлении робототехническими устройствами в опасных для человека зонах и т.д.
В настоящее время известен комбинированный прицел-прибор наведения, содержащий визирный канал, лазерный канал наведения, содержащий последовательно расположенные и оптически связанные лазер непрерывного излучения, модулятор лазерного излучения и формирующую оптическую систему, а также передающий канал лазерного дальномера и приемный канал лазерного дальномера (Патент RU №2375665, приоритет 21.01.2008 г., МПК: F41G 3/06, G02B 23/00).
В таких прицелах-приборах установлен лазерный канал наведения, использующий принцип телеориентации управляемого объекта (УО) в лазерном информационном поле-растре, информационная ось которого, проходящая через центр лазерного растра, совмещена с линией визирования цели (Патент США 4111383, НКИ 244 - 3.13, 05.09.78). Основной проблемой, возникающей в таких системах, является проблема помехозащищенности, включающая в себя вопросы помехоустойчивости оптической линии связи и вопросы скрытности.
Помехоустойчивость оптических линий связи "визирный канал системы наведения - цель" и "лазерный канал наведения - приемник управляемого объекта" в таких системах значительно снижается вследствие скопления дыма двигателя объекта или образования пылевого облака при запуске именно на линии визирования цели, что при малых боковых ветрах может приводить как к потере видимости цели оператором, так и к срыву управления объектом при недостаточном энергетическом потенциале используемого лазерного канала наведения (ЛКН).
Скрытность аналогичных систем при современном уровне развития и оснащения техники детекторами лазерного излучения практически пропадает, и наложение лазерного луча наведения на цель в течение всего времени наведения дает достаточно много времени для оказания противодействия (дымовые помехи для канала управления, лазерное противодействие для визирного канала и т.п.).
Повышение помехозащищенности ЛКН достигают тем, что для систем, имеющих пусковую установку, управляемую по положению, лазерный луч формируют таким образом, чтобы оптическая ось луча перед пуском управляемого объекта была смещена, например, для наземных пусковых установок поднята относительно линии визирования цели на некоторую величину. Величина смещения сохраняется постоянной по мере полета объекта, и лишь при подлете к цели на заданную дальность осуществляют по определенному закону уменьшение этого смещения до нуля, то есть совмещение оптической оси луча с линией визирования цели. В этом случае облучение лазерным лучом цели происходит в течение небольшого интервала времени, когда он наложен на цель (Патент RU №2267734, приоритет 17.12.2003 г., МПК: F41G 7/26, G01S 1/70).
В такой лазерный канал наведения перед пуском управляемого объекта вводят дальность до цели. В зависимости от значения дальности и с учетом известной скорости управляемого объекта аппаратура рассчитывает время полета с превышением и определяет траекторию снижения. Таким образом, в состав прицела, помимо ЛКН, должен входить дальномер, что увеличивает габариты и вес прицела.
Техническим результатом предлагаемого изобретения является уменьшение габаритно-весовых характеристик оптико-электронного прибора при сохранении возможности измерения дальности и наблюдения фоно-целевой обстановки.
Для достижения указанного технического результата в известном оптико-электронном приборе, включающем последовательно соединенные лазер и оптико-электронную систему сканирования, включающую два скрещенных анизотропных акустооптических дефлектора и выходную оптическую систему, а также блок управления дефлекторами, выходы которого подключены к входам управления дефлекторов, а на управляющие входы которого поступают внешние сигналы пуска и схода управляемого изделия, введены блок выбора режима, на вход которого поступает внешний сигнал разрешения измерения дальности, генератор синхроимпульсов, блок управления модулятором, оптический модулятор добротности резонатора, установленный в лазере, вход управления которого соединен с выходом блока управления модулятором, выходная оптическая система дальномерного канала и поляризационный призменный блок, установленный между первым и вторым акустооптическими дефлекторами, второй выход которого соединен с входом оптической системы дальномерного канала, а также приемный дальномерный канал, включающий последовательно соединенные приемную оптическую систему, фотоприемное устройство и блок накопления эхо-сигналов и вычисления дальности, выход дальности которого соединен с входом дальности блока управления дефлекторами, а вход синхронизации соединен с первым выходом генератора синхросигналов, второй выход генератора синхросигналов соединен с входом синхронизации блока управления модулятором, причем выход разрешения измерения дальности блока выбора режима соединен с входами разрешения работы блока управления модулятором и блока управления дефлекторами.
В приемный дальномерный канал введены последовательно соединенные ПЗС-матрица и блок комбинированной обработки видеосигнала, а также светоделительная призма, установленная между приемной оптической системой и фотоприемным устройством, второй выход которой соединен с входом ПЗС-матрицы, причем второй вход блока комбинированной обработки видеосигнала соединен с выходом дальности блока накопления эхо-сигналов и вычисления дальности, а выход соединен с внешним видео-монитором.
Заявителем и авторами в патентной и научно-технической литературе не обнаружены оптико-электронные приборы (ОЭП), в которых бы поставленная цель достигалась подобным образом.
На фиг.1 представлена блок-схема комбинированного оптико-электронного прибора.
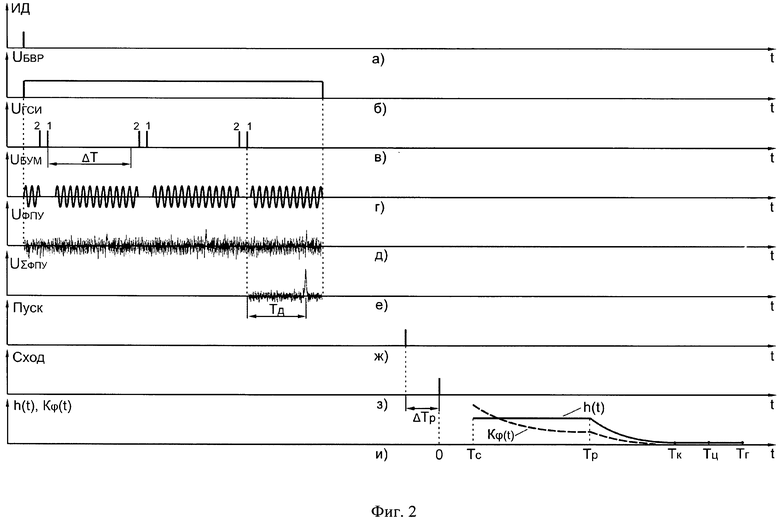
На фиг.2 представлены временные диаграммы работы комбинированного оптико-электронного прибора при измерении дальности и при наведении управляемого объекта на цель.
Комбинированный оптико-электронный прибор содержит последовательно соединенные лазер 1 и оптико-электронную систему сканирования 7, блок управления дефлекторами 13, блок выбора режима 21, генератор синхроимпульсов 19, блок управления модулятором 20, выходную оптическую систему 12 дальномерного канала и приемный дальномерный канал 22. Лазер 1 включает в своем составе лазерный излучатель 2, содержащий активный элемент 3 с глухим зеркалом резонатора, оптический модулятор добротности резонатора лазера 4, выполненный, например, в виде акустооптического модулятора, и выходное зеркало 5, и коллиматор 6.
Оптико-электронная система сканирования 7 включает последовательно соединенные первый анизотропный акустооптический дефлектор 8, поляризационный призменный блок 9, второй анизотропный акустооптический дефлектор 10, скрещенный относительно первого дефлектора, и выходную оптическую систему 11. Второй выход поляризационного призменного блока 9 соединен с входом выходной оптической системы 12 дальномерного канала.
Блок управления дефлекторами 13 включает последовательно соединенные блок формирования синхросигналов и параметров растра (БФСиПР) 14, формирователь кодов растра (ФКР) 15, сумматор 16 и двухканальный синтезатор частот (ДСЧ) 17, выходы которого соединены с входами управления акустооптических дефлекторов 8 и 10, а также формирователь кодов смещения 18. Входы формирователя кодов смещения 18 соединены с выходами синхронизации блока формирования синхросигналов и параметров растра 14 и выходом дальности блока накопления эхо-сигналов и вычисления дальности 25, а выход соединен с вторым входом сумматора 16.
Приемный дальномерный канал 22 включает последовательно соединенные приемную оптическую систему 23, фотоприемное устройство 24 и блок накопления эхо-сигналов и вычисления дальности (БВЭС и ВД) 25, шина выходных данных которого соединена с внешними устройствами и с входом дальности блока управления дефлекторами 13, а вход синхронизации соединен с первым выходом генератора синхроимпульсов 19.
Приемный дальномерный канал может дополнительно содержать последовательно соединенные ПЗС-матрицу 27 и блок комбинированной обработки видеосигнала 28, а также светоделительную призму 26, установленную между приемной оптической системой 23 и фотоприемным устройством 24. Второй выход светоделительной призмы 26 соединен с входом ПЗС-матрицы 27. Второй вход блока комбинированной обработки видеосигнала 28 соединен с выходом дальности блока накопления эхо-сигналов и вычисления дальности 25, а выход соединен с внешним видеомонитором 29.
Второй выход генератора синхроимпульсов 19 соединен с входом синхронизации блока управления модулятором 20. Выход блока управления модулятором 20 соединен с входом управления оптического модулятора добротности резонатора лазера 4. Выход разрешения измерения дальности блока выбора режима 21 соединен с входами разрешения работы блока управления модулятором 20 и блока управления дефлекторами 13.
В режиме наведения управляемого объекта на акустооптические дефлекторы 8 и 10 поступают сигналы управления от блока управления дефлекторами 13. Непрерывное излучение лазера 1 проходит с отклонением по одной координате акустооптический дефлектор 8, проходит без отклонения поляризационный блок 9 и проходит с отклонением по ортогональной координате акустооптический дефлектор 10, и после прохождения выходной оптической системы 11 образует в пространстве лазерный информационный растр для наведения УО. Лазерный пучок после анизотропной дифракции на первом дефлекторе изменяет состояние поляризации и поэтому проходит поляризационный призменный блок 9 без отклонения и поступает на второй дефлектор.
В режиме измерения дальности импульсный лазерный пучок лазера 1 проходит акустооптический дефлектор 8, на который не поступает сигнал управления от блока управления дефлекторами 13, без дифракции и, соответственно, без поворота плоскости поляризации, и поляризационным призменным блоком 9, через его второй выход, направляется на выходную оптическую систему 12 дальномерного канала и далее направляется на цель. Отраженные от цели лазерные эхо-сигналы поступают на приемную оптическую систему 23 и проектируются ею на фотоприемное устройство 24. На вход приемной оптической системы 23 также приходят световые волны видимого диапазона, несущие информацию о фоно-целевой обстановке. Световые волны видимого диапазона и отраженные от цели лазерные эхо-сигналы разделяются светоделительной призмой 26. Световые волны видимого диапазона проектируются на ПЗС-матрицу 27, где строится изображение фоно-целевой обстановки.
Работа комбинированного оптико-электронного прибора происходит следующим образом.
1. Режим измерения дальности.
При подаче на блок выбора режима 21 ОЭП (фиг.1) внешней команды «Измерение дальности» (ИД) (фиг.2а)) ОЭП устанавливается в режим дальнометрии. На выходе блока выбора режима 21 формируется сигнал высокого уровня UБВР (фиг.2б)), включается лазер 1, а на вход управления оптического модулятора добротности резонатора лазера 4, выполненного, например, в виде акустооптического модулятора, подается непрерывный высокочастотный сигнал от блока управления модулятором 20, срывающий генерацию лазерного излучения лазера. Генератор синхроимпульсов 19 вырабатывает пары импульсов 1 и 2 UГСИ (фиг.2б)), частота повторения которых равна, например, 4 кГц. Сигнал высокого уровня UБВР разрешает прохождение импульсов синхронизации 2 (фиг.2в)) от генератора синхроимпульсов 19 на блок управления модулятором 20, при этом в высокочастотном сигнале UБУМ образуются паузы (фиг.2г)), во время которых лазер излучает короткие световые импульсы длительностью около 10 нс, время появления которых относительно фронта импульса синхронизации 2 задержано примерно на 100 нс и совпадает по времени с появлением импульсов синхронизации 1 (фиг.2в)) генератора синхроимпульсов 19.
Лазерные импульсы имеют поляризацию, которая ориентирована перпендикулярно плоскости чертежа и на фиг.1 показана точкой. Лазерные импульсы проходят коллиматор 6, проходят дефлектор 8 без дифракции и без изменения состояния поляризации, и призменным блоком 9, через его второй выход, направляются на вход выходной оптической системы 12 дальномерного канала. Лазерный пучок на выходе оптической системы 12 дальномерного канала направлен на цель.
Сигнал высокого уровня UБВР имеет длительность, обеспечивающую, например, прохождение 256 импульсов синхронизации 2 (фиг.2в)) от генератора синхроимпульсов 19 на блок управления модулятором 20. При этом цель будет облучена 256 раз короткими лазерными импульсами.
Отраженные от цели лазерные эхо-сигналы поступают на приемную оптическую систему 23 и проектируются ею на фотодиод фотоприемного устройства (ФПУ) 24. Фотодиод ФПУ 24 преобразует световые сигналы в электрические импульсы, которые усиливаются в усилителе ФПУ 24. Выходные электрические импульсы ФПУ 24 (фиг.2д)), замешанные с шумом, UФПУ поступают на вход блока накопления эхо-сигналов и вычисления дальности 25. В блоке накопления эхо-сигналов и вычисления дальности 25 происходит «оцифровка» амплитуды поступившей смеси сигнал/шум, например, десятиразрядным аналогово-цифровым преобразователем (АЦП) с частотой тактирования FT, равной, например, FT=200 МГц, за время ΔT=ДMAX/c, где ДMAX - максимальная измеряемая дальность до цели, с - скорость света. Время ΔT отсчитывается от каждого импульса синхронизации 1, поступающего на блок накопления эхо-сигналов и вычисления дальности 25 с генератора синхроимпульсов 19 (фиг.2в)).
Десятиразрядный код амплитуды смеси сигнал/шум после первого импульса синхронизации 1 записывается в буфер памяти, и далее, по мере поступления следующих импульсов синхронизации 1, новые данные кодов амплитуды смеси сигнал/шум суммируются с предыдущими данными. В результате суммирования в буфере памяти БВЭС и ВД 25 находится суммарная цифровая выборка смеси сигнал/шум UΣ (фиг.2е)), в которой отношение сигнал/шум увеличено в  раз, где N - число излученных световых импульсов. Дальность ДЦ до цели определяется выражением ДЦ=ММ×с/FT, где ММ - порядковый номер цифровой выборки с наибольшим значением амплитуды, отсчитываемый от последнего, например, 256-го импульса синхронизации 1 (на фиг.2в) это третий импульс) генератора синхроимпульсов 19. Полученные цифровые данные дальности до цели поступают на вход дальности блока управления дефлекторами 13, где записываются в память формирователя кодов смещения 18, и поступают на шину данных для записи во внешние устройства. Точность измерения дальности определяется частотой тактирования FT и, при FT=200 МГц, равна 0,75 м.
раз, где N - число излученных световых импульсов. Дальность ДЦ до цели определяется выражением ДЦ=ММ×с/FT, где ММ - порядковый номер цифровой выборки с наибольшим значением амплитуды, отсчитываемый от последнего, например, 256-го импульса синхронизации 1 (на фиг.2в) это третий импульс) генератора синхроимпульсов 19. Полученные цифровые данные дальности до цели поступают на вход дальности блока управления дефлекторами 13, где записываются в память формирователя кодов смещения 18, и поступают на шину данных для записи во внешние устройства. Точность измерения дальности определяется частотой тактирования FT и, при FT=200 МГц, равна 0,75 м.
Световые волны видимого диапазона, несущие информацию о фоно-целевой обстановке, разделяются светоделительной призмой 26 и проектируются на ПЗС-матрицу 27, где строится изображение фоно-целевой обстановки. Видеосигналы с выхода ПЗС-матрицы 27 поступают на вход блока комбинированной обработки видеосигнала 28, где вырабатывается комбинированный видеосигнал. В видеосигналы изображения фоно-целевой обстановки замешиваются видеосигналы прицельных меток и видеосигналы цифрового изображения дальности, данные о которой поступают с блока накопления эхо-сигналов и вычисления дальности 25. Комбинированный видеосигнал с блока 28 поступает на внешний видео-монитор 29, где формируется изображение фоно-целевой обстановки, прицельная метка, цифровое изображение дальности до цели и иные символы, способствующие наблюдению и сопровождению цели оператором.
После установки сигнала UБВР (фиг.2б)) в низкий уровень, ОЭП переходит в режим ожидания следующих внешних команд управления.
2. Режим наведения УО на цель.
Режим наведения УО на цель не отличается от алгоритма работы ОЭП, описанного для прототипа.
При подаче на блок управления дефлекторами 13 (фиг.1) внешней команды «Пуск» (фиг.2ж)) устанавливаются начальные параметры всех блоков, входящих в состав блока управления дефлекторами 13, и включается лазер 1, излучающий непрерывный лазерный пучок. Через время ΔТР, равное примерно 1с, формируется внешняя команда "Сход"(фиг.2з)).
При подаче на блок управления дефлекторами 13 (фиг.1) внешней команды "Сход" через время TC, в течение которого управляемый объект достигает начальной дальности управления L0, БФСиПР 14 начинает функционировать в режиме изменения параметров лазерного растра. Он вырабатывает в течение интервала времени Δti коды угловых размеров растра MK, коды признаков типа растра PK, число строк NS и другие служебные команды. Последовательно соединенный с БФСиПР 14 ФКР 15 вырабатывает двоичные коды ZT и YT, определяющие траекторию сканирования лазерного пучка в растре. В ФКС 18 формируются коды смещения по вертикали (превышения) Kφ. Условно характер изменения кода Kφ представлен на фиг.2и). Таким образом на входы сумматора 16 подаются двоичные коды ZT и YT с выходов формирователя кодов растра 15 и коды смещения по вертикали (превышения) Kφ с выхода ФКС 18, изменяющиеся во времени в зависимости от дальности до цели. Сумматор 16 выполнен таким образом, что на его выходах, соединенных с входами ДСЧ 17 формируются коды ZC=ZT, YC=YT+Kφ, определяющие смещение по вертикали (превышение) центра лазерного растра над линией визирования цели. Коды ZC и YC, поданные в ДСЧ 17, преобразуются в перестраиваемые во времени высокочастотные сигналы управления fzc и fyc. Эти сигналы подаются в дефлекторы 8 и 10 ОЭСС 7. Они определяют размеры лазерного растра управления и смещение его центра относительно линии визирования цели на величину h(t).
В ФКС 18 формируются коды смещения по вертикали (превышения) Kφ=F(L) таким образом, чтобы линейная величина превышения h0 была постоянной в интервале времени TC…ТР и далее уменьшалась, например, по кривой снижения, представленной в виде: h(t)=h0(1-e-t/τ), где: τ - постоянная, определяющая скорость снижения, t - текущее время от начала снижения. Условно характер изменения линейной величины превышения h(t) центра лазерного растра над линией визирования цели представлен на фиг.2и).
Через время TK (фиг.2и)) после подачи внешней команды "Сход" линия визирования цели совпадает с центром лазерного растра, и УО летит до встречи с целью в расчетный момент времени ТЦ (фиг.2и)). БФСиПР 14 формирует команды управления до времени ТГ>ТЦ, чтобы учесть нестабильность скорости УО, например, от погодных условий. Далее блок управления дефлекторами 13 прекращает формирование сигналов управления и ЛСТ переходит в режим ожидания внешних команд управления.
Лазер 1, работающий в непрерывном и импульсном режимах, может быть реализован на активном элементе из граната с неодимом и накачкой полупроводниковыми лазерными диодами. Внутри резонатора может быть установлен акустооптический модулятор, например, серийно выпускаемый М3-321М, имеющий частоту сигнала управления 80 МГц. Вариант выполнения такого лазера изложен в (В.В. Безотосный и др. Высокоэффективный компактный Nd3+:YAG - лазер на длине волны 1,064 мкм, работающий в непрерывном и импульсном режимах, с диодной накачкой и модуляцией добротности акустооптическим затвором. Квантовая электроника, т.35, №6 (2005), с.507-510). Такой лазер обеспечивает на выходе мощность в непрерывном режиме 1,8 Вт, а в импульсном режиме на частоте повторения импульсов 5 кГц мощность в импульсе превышает 120 мкДж при дифракционной расходимости и длительности импульса около 7 нс. При накоплении эхо-сигналов от импульсов эквивалентная лазерная мощность по сравнению с моноимпульсным дальномером равна  мДж, что обеспечит, учитывая дифракционную расходимость лазерного излучения, измерение дальности около 10 км. При увеличении мощности лазера это значение дальности может быть увеличено.
мДж, что обеспечит, учитывая дифракционную расходимость лазерного излучения, измерение дальности около 10 км. При увеличении мощности лазера это значение дальности может быть увеличено.
БФСиПР 14, ФКР 15, сумматор 16 и генератор синхроимпульсов 19 могут быть реализованы, как указано в прототипе, на основе ряда микроконтроллеров, например, Т89С51АС2 фирмы ATMEL, содержащих энергонезависимую память, порты управления и временные таймеры.
Блок накопления эхо-сигналов и вычисления дальности 25, осуществляющий «оцифровку» амплитуды поступившей смеси сигнал/шум, синхронное по времени сложение цифровых кодов амплитуд и измерение временного интервала, отсчитываемого от последнего импульса синхронизации до максимума цифрового сигнала, определяющего дальность до цели, также может быть реализован на основе ряда микроконтроллеров, например, Т89С51АС2 фирмы ATMEL, содержащих помимо энергонезависимой памяти, портов управления и временных таймеров, десятиразрядный аналого-цифровой преобразователь, необходимый для преобразования аналогового выходного сигнала ФПУ 24 в цифровой код.
Следует отметить и дополнительные возможности предлагаемого ОЭП. Классические импульсные дальномеры, как правило, содержат в своем составе твердотельный лазер, реализованный на кристалле Nd:YAG, с накачкой твердотельного активного элемента излучением импульсных ламп. Как правило, такие дальномеры имеют расходимость лазерного излучения на выходе дальномера примерно 6×10-4 рад. Диаметр лазерного пятна от дальномера в плоскости цели, находящейся на дистанции 5 км, равен 3 м, что накладывает ограничение на пространственное разрешение дальномера. Угловая расходимость лазера в предлагаемой ЛСТ почти равна дифракционной и при световой апертуре 18 мм составляет величину 10-4 рад. На дальности 5 км диаметр лазерного пятна равен 0,5 м. Это значительно повышает пространственное разрешение дальномера.
Таким образом, введение в ОЭП блока выбора режима, генератора синхроимпульсов, блока управления модулятором, оптического модулятора добротности резонатора, выходной оптической системы дальномерного канала и поляризационного призменного блока, а также приемного дальномерного канала, включающего последовательно соединенные приемную оптическую систему, фотоприемное устройство и блок накопления эхо-сигналов и вычисления дальности с вышеуказанными связями позволяет, за счет работы лазера в двух режимах - непрерывном и импульсном, уменьшить габаритно-весовые характеристики оптико-электронного прибора при сохранении возможности измерения дальности и наблюдения фоно-целевой обстановки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2528109C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С КАНАЛОМ ОПТИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ (ВАРИАНТЫ) | 2009 |
|
RU2410722C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СО СЛЕДЯЩИМ ДАЛЬНОМЕРОМ | 2009 |
|
RU2410629C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2000 |
|
RU2177208C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2003 |
|
RU2267734C2 |
| СПОСОБ ПРИЦЕЛИВАНИЯ И НАВЕДЕНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ | 2009 |
|
RU2413159C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЛАЗЕРНОГО РАСТРА | 2013 |
|
RU2532504C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ВОЗДУШНОЙ ЦЕЛИ И ОПТИЧЕСКИЙ ПРИЦЕЛ СО СЛЕДЯЩИМ ДАЛЬНОМЕРОМ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2549552C2 |
| Система импульсной лазерной локации | 2015 |
|
RU2612874C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2478898C1 |
Изобретение относится к области оптико-электронного приборостроения. Заявленное устройство включает последовательно соединенные лазер и оптико-электронную систему сканирования, включающую два скрещенных анизотропных акустооптических дефлектора и выходную оптическую систему, а также блок управления дефлекторами, выходы которого подключены к входам управления дефлекторов, а на управляющие входы которого поступают внешние сигналы пуска и схода управляемого изделия, блок выбора режима, на вход которого поступает внешний сигнал разрешения измерения дальности, генератор синхроимпульсов, блок управления модулятором, оптический модулятор добротности резонатора, вход управления которого соединен с выходом блока управления модулятором, выходная оптическая система дальномерного канала и поляризационный призменный блок, установленный между первым и вторым акустооптическими дефлекторами, второй выход которого соединен с входом оптической системы дальномерного канала. Приемный дальномерный канал включает последовательно соединенные приемную оптическую систему, фотоприемное устройство и блок накопления эхо-сигналов и вычисления дальности. Технический результат - уменьшение габаритно-весовых характеристик оптико-электронного прибора при сохранении возможности измерения дальности и наблюдения фоно-целевой обстановки. 1 з.п. ф-лы, 2 ил.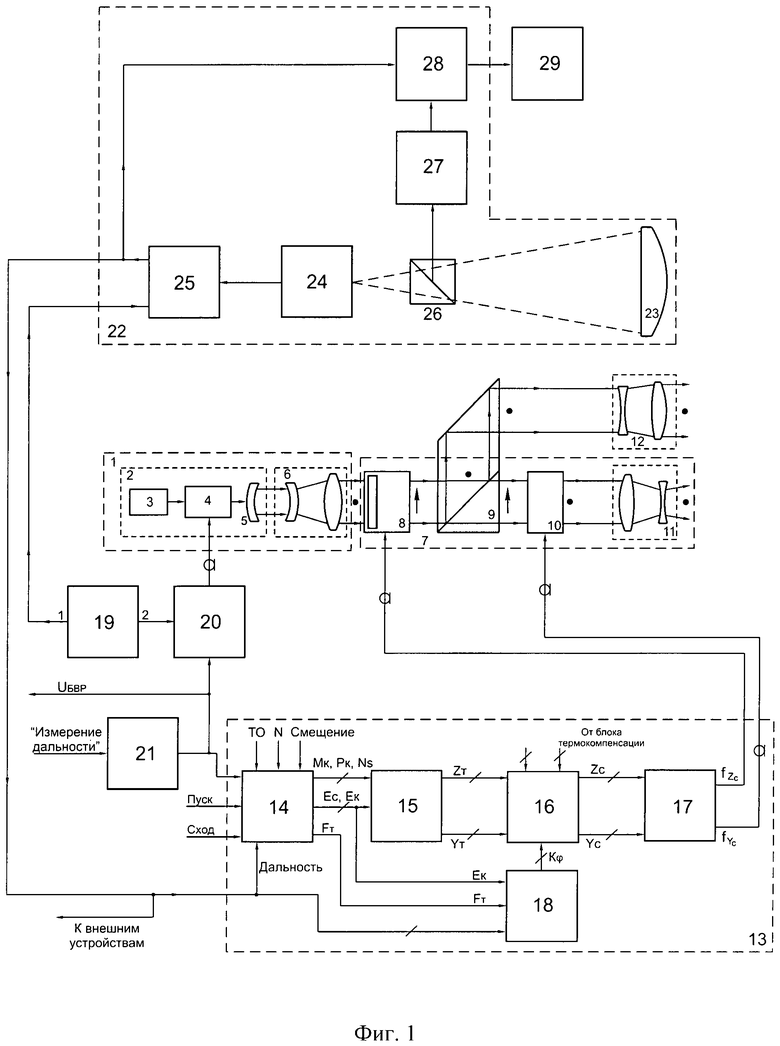
1. Комбинированный оптико-электронный прибор, включающий последовательно соединенные лазер и оптико-электронную систему сканирования, включающую два скрещенных анизотропных акустооптических дефлектора и выходную оптическую систему, а также блок управления дефлекторами, выходы которого подключены к входам управления дефлекторов, а на управляющие входы которого поступают внешние сигналы пуска и схода управляемого изделия, отличающийся тем, что в него введены блок выбора режима, на вход которого поступает внешний сигнал разрешения измерения дальности, генератор синхроимпульсов, блок управления модулятором, оптический модулятор добротности резонатора, установленный в лазере, вход управления которого соединен с выходом блока управления модулятором, выходная оптическая система дальномерного канала и поляризационный призменный блок, установленный между первым и вторым акустооптическими дефлекторами, второй выход которого соединен с входом оптической системы дальномерного канала, а также приемный дальномерный канал, включающий последовательно соединенные приемную оптическую систему, фотоприемное устройство и блок накопления эхо-сигналов и вычисления дальности, выход дальности которого соединен с входом дальности блока управления дефлекторами, а вход синхронизации соединен с первым выходом генератора синхросигналов, второй выход генератора синхросигналов соединен с входом синхронизации блока управления модулятором, причем выход разрешения измерения дальности блока выбора режима соединен с входами разрешения работы блока управления модулятором и блока управления дефлекторами.
2. Комбинированный оптико-электронный прибор по п.1, отличающийся тем, что в приемный дальномерный канал введены последовательно соединенные ПЗС-матрица и блок комбинированной обработки видеосигнала, а также светоделительная призма, установленная между приемной оптической системой и фотоприемным устройством, второй выход которой соединен с входом ПЗС-матрицы, причем второй вход блока комбинированной обработки видеосигнала соединен с выходом дальности блока накопления эхо-сигналов и вычисления дальности, а выход соединен с внешним видеомонитором.
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2003 |
|
RU2267734C2 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С КАНАЛОМ ОПТИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ (ВАРИАНТЫ) | 2009 |
|
RU2410722C1 |
| RU 96122266 A, 27.08.1998 | |||
| US 6357694 A, 19.03.2002. | |||

