Предлагаемое изобретение относится к светолокации и может быть использовано в системах связи и оптико-электронных измерительных устройствах, оптико-электронных тирах, прицелах охотничьих ружей и т.д.
Основным недостатком светолокационных (лазерных) дальномеров является низкая пороговая чувствительность, которая определяется уровнем дробовых и тепловых шумов и как следствие этого небольшая дальность действия при наличии ограничений по мощности излучения и габаритно-весовым характеристикам.
Известен лазерный импульсный дальномер для обнаружения препятствий на небольшие расстояния (патент США №3781111, кл. 356-5, М.кл. G 01 S 3/08, заявл. 16.03.72, опубл. 25.12.73.) Устройство состоит из линейной решетки лазерных диодов, селектора и синхронизующего генератора, с помощью которых осуществляется последовательное включение лазерных диодов в процессе сканирования пространства; линзы, формирующей веерообразный лазерный пучок, зеркала сканирования пространства с устройством привода, приемной оптической линзы, фотоприемного устройства, порогового устройства, пересчетной схемы для определения дальности. Сканирование осуществляется последовательным включением лазерных диодов.
Однако в указанном устройстве для обеспечения высокой помехозащищенности от аэрозольных помех требуется высокое пространственное разрешение (малый объем рассеяния), при которых помеха, отраженная от сформированного малого объема рассеяния на i-й дальности, будет иметь мощность обратного рассеяния ниже порогового уровня срабатывания дальномера.
При относительно больших дальностях локации это достигается использованием относительно большой базы (расстояние между приемным и передающим объективом) и увеличением «мертвой зоны», а также созданием знакопеременной функции селекции по дальности. Такое условие противоречит ограничительному критерию по реализации малых габаритно-весовых характеристик.
Кроме того, наличие коммутатора (мультиплексора) переключения фотодиодов или применения механической схемы обзора пространства приводит к дополнительным коммутационным шумам и к усложнению схемы обработки.
Таким образом, рассматриваемое устройство - лазерная система для обнаружения препятствий даже на небольшие расстояния при ограниченных габаритно-весовых характеристиках системы имеет невысокий потенциал (отношение мощности излучения к пороговой чувствительности фотоприемного тракта). Реализовать низкую пороговую чувствительность, определяемую рациональным (квазиоптимальным) выбором отношения сигнал - шум - помеха, по структурной схеме рассматриваемого аналога не представляется возможным. Фотоприемный тракт при использовании p-i-n диодов и длительности импульсов порядка 50-100 нс имеет пороговую чувствительно порядка 10-7 -10-8 Вт, применение лавинных фотодиодов позволяет улучшить пороговую чувствительность до уровня 10-9-10-10 Вт.
Кроме того, известен лазерный импульсный дальномер (патент USA №3666367, Н.кл. 356-5, М.кл. G 01 C 3/08, May 30, 1972), являющийся прототипом предлагаемого изобретения и состоящий из соединенных между собой лазера, задающего генератора и источника накачки лазера, по оптическому каналу соединенного с формирующей оптикой (объектив, линза), выход которой соединен с фотоприемным трактом, состоящего, например, из последовательно соединенных фотодиода (например, лавинного) с дифференцирующим каскадом, предусилителя, видеоусилителя, низкочастотным с отсекающим фильтром, выход которого последовательно соединен со старт-стопным измерителем дальности и индикатором дальности, а по второму оптическому каналу лазер соединен с формирователем стробирующего (стартового) сигнала, который в свою очередь соединен со вторым управляемым входом фотоприемного тракта.
В подобных системах пороговая чувствительность фотоприемного тракта определяется дисперсией аддитивной смеси дробовых и тепловых шумов, что не позволяет на базе полупроводниковых лазеров даже с мощностью порядка 3-6 Вт реализовать дальности регистрации объекта, превышающие порядка одного, полутора километров. Поэтому при регистрации объектов на дистанции более километра требуются новые решения по снижению пороговой чувствительности при соблюдении таких ограничительных критериев, как использование полупроводниковых лазеров, имеющих невысокую импульсную мощность излучения, но минимальные габаритно-весовые характеристики, невысокую стоимость и т.д.
Применение малогабаритных твердотельных лазеров резко снижает частоту повторения зондирующих импульсов (единицы Гц), и дальномеры на этой основе представляют из себя, как правило, монолокационные системы, которые из-за однопороговой схемы квантования имеют относительно высокую вероятность ложных срабатываний.
Задачей предлагаемого изобретения является снижение пороговой чувствительности лазерного импульсного дальномера и улучшение его массогабаритных показателей.
Под пороговой чувствительностью фотоприемного тракта принимается порог срабатывания заявляемой системы при определенном отношении сигнал-шум.
Поставленная задача достигается тем, что в известном лазерном импульсном дальномере, состоящем из соединенных между собой задающего импульсного генератора, генератора накачки и лазера, а также формирующей оптики, выход которой оптически соединен с фотоприемным трактом, состоящим из последовательно соединенных фотодетектора, дифференцирующего каскада, предусилителя и видеоусилителя, выход которого являющийся выходом фотоприемного тракта, последовательно соединен со старт-стопным измерителем дальности и индикатором дальности, а лазер оптически соединен с формирователем стробирующего сигнала, выход которого соединен с управляемым входом видеоусилителя и с управляемым входом старт-стопного измерителя дальности, введено между выходом фотоприемного тракта и входом старт-стопного измерителя дальности последовательно подключенные блок взвешенного разнополярного суммирования сигналов, принимаемых от отдельных подряд расположенных по дальности участков лоцирования, а также устройство поиска максимума, определяющее участок лоцирования, соответствующий максимальной накопленной при суммировании амплитуде сигнала, и счетчик m из n для проверки достоверности селекции участка лоцирования соответствующего максимальной накопленной при суммировании амплитуде сигнала, которые по управляемым входам соединены с выходом формирователя стробирующего сигнала.
На фиг.1 приведена структурная схема предлагаемого устройства.
Предлагаемое устройство (фиг.1) содержит:
1 - задающий импульсный генератор;
2 - генератор накачки лазера;
3 - лазер с формирующей оптикой;
4 - формирователь стробирующего сигнала;
5 - формирующая оптика с оптическим фильтром;
6 - фотоприемный тракт;
7 - фотодетектор;
8 - дифференцирующий каскад;
9 - предусилитель;
10 - видеоусилитель;
11 - блок взвешенного разнополярного суммирования сигналов, поступающих от отдельных последовательных временных интервалов, соответствующих участкам разбиения всей измеряемой дальности;
12 - устройство выборки-хранения (УВХ);
13 - разнополярный аналого-цифровой преобразователь АЦП;
14 - умножитель;
15 - шина;
16 - ОЗУ;
17 - устройство поиска максимума, определяющее участок лоцирования, соответствующий максимальной накопленной при суммировании амплитуде сигнала;
18 - счетчик m из n;
19 - старт-стопный измеритель дальности;
20 - исполнительный каскад (индикатор дальности).
В заявляемом импульсном дальномере лазер с формирующей оптикой 3, соединен с генератором накачки лазера 2, который по управляемому входу соединен с задающим импульсным генератором 1 и представляет собой единый блок-излучатель. Выход лазера 3 оптически соединен с формирователем стробирующего сигнала 4, определяющим момент излучения лазерной посылки светового импульса и формирующим временные интервалы, соответствующие локируемым участкам по всей дистанции, а также старт-стопные сигналы. Выход блока 4 соединен с управляемыми входами блоков 11, 17-19.
Лазер 3 также оптически соединен с формирующей оптикой приемника 5. Объектив оптически соединен с фотоприемным трактом 6, представляющим, например, последовательно соединенные фотодетектор 7, выход которого соединен со входом дифференцирующего каскада 8. Здесь дифференцирующий каскад 8 отсекает низкочастотный спектр фоновой засветки. Выход дифференцирующего каскада 8 далее последовательно соединен с предусилителем 9, видеоусилителем 10, по управляемому входу соединенного с выходом формирователя стробирующего сигнала 4. Выход этого же видеоусилителя 10, являющийся выходом фотоприемного тракта 6 соединен с блоком взвешенного суммирования сигналов 11, поступающих от отдельных последовательных временных интервалов, соответствующих участкам разбиения всей измеряемой дальности. Блок 11 состоит из последовательно соединенных: устройства выборки-хранения (УВХ) 12, разнополярного АЦП 13, соединенного с умножителем весового коэффициента 14 через шину 15. Выход умножителя 14 через шину данных 15 соединен с оперативным запоминающим устройством (ОЗУ) 16, имеющим число ячеек памяти, равное числу интервалов разбиения всей дальности лоцирования на элементарные участки оцифровки, осуществляемые АЦП 13. Управляемые входы УВХ 12, разнополярного АЦП 13, умножителя 14, шина данных 15 и ОЗУ 16 (через шину 15) соединены с выходом формирователя стробирующего сигнала 4. Выход ОЗУ 16 и соответственно выход блока взвешенного суммирования 11 соединен со входом устройства поиска максимума, определяющего участок лоцирования, соответствующий максимальной, накопленной при суммировании амплитуде сигнала 17, управляемый вход которого также соединен со выходом формирователя стробирующего сигнала 4.
Выход устройства 17 соединен со входом счетчика m из n 18, осуществляющего вероятностную оценку достоверности появления максимума. Выход счетчика m из n 18 последовательно соединен со старт-стопным измерителем дальности 19, выход которого соединен с исполнительным каскадом 20.
Задающий импульсный генератор 1 выполнен с применением однопереходного транзистора, генератор накачки 2 полупроводникового лазера 3 с формирующей оптикой конструктивно реализован в виде единого моноблока. Принципиальная схема такого блока приведена на рис.2.111, стр.159 в книге В.Н.Легкий, И.Д.Миценко. Малогабаритные генераторы накачки полупроводниковых лазеров. - Томск: Радио и связь, 1990, 215 с.
Принципиальная схема формирователя стробирующего сигнала 4 соответствует схеме оптической обратной связи, которая описана на рис.3.2, стр.169 (элементы R12, R13, R16, R19, R20, R13, R27; С3, С4, С8, С10; DA1, VD13) в книге В.Н.Легкий, И.Д.Миценко. Малогабаритные генераторы накачки полупроводниковых лазеров. - Томск: Радио и связь, 1990, 215 с. Кроме того, формирователь содержит внутренний таймер, построенный на основе МПК КР580, применяется микросхема программируемого интервального таймера (ПИТ) КР580 ВИ53 http://www.bmstu.ru/˜iu6/vlab/html/m/53.html - исследование интервального таймера КР580 ВИ53 (техническое описание УМПК - 80). Таймер предназначен для получения программно-управляемых временных задержек и выполнения времязадающих функций.
Оптическая система для лазера 3 и фотоприемника 6 представляет из себя описанный в книге: Н.П.Заказнов. Теория оптических систем. - М: Машиностроение, 1992, 442 с, типовой объектив, например стр.256. Такие объективы при малом размере фоточувствительной площадки 0,1×0,1 мм создают малый угол зрения (20-30'), что позволяет устанавливать типовой интерференционный фильтр на входе такого объектива без применения коллиматора.
Фотодетектор 7 (VD1); дифференцирующий каскад 8 (C3,R3); предусилитель 9 (VT1, VT2) и видеоусилитель 10 с управляемым входом по базе транзистора VT3 показана на рис.3.9, стр.175 в книге В.Н. Легкий, И.Д.Миценко. Малогабаритные генераторы накачки полупроводниковых лазеров. - Томск: Радио и связь, 1990, 215 с.
Блок взвешенного суммирования информации на отдельных последовательных участках дальности 11 состоит из узлов 12-16.
Устройство выборки-хранения 12 выполнено на схеме К1103СК1А или К1103СК1Б (апертурная задержка 5-7 нс), описано в книге стр.27 В.А.Жмудь. Электронные системы управления лазерным излучением, ч.2. - Новосибирск: НГТУ, 1999, 55 с или в изданиях: Интегральные микросхемы и их зарубежные аналоги: Справочник. Том 7/А.В.Нефедов. - М.: ИП Радио Софт, 1998 г.- 640 с.:ил., а также http://www.chipinfo.ru/dsheets/ic/1103/index.html;
Разнополярный АЦП 13 описан в параграфе 8.7, стр.294 в книге: Ю.А.Браммер, И.Н.Пащук. Импульсная техника. - М.: Высшая школа, 1985, стр.317. При отработке системы можно использовать АЦП различного типа, в том числе АЦП совмещенный с УВХ http://www.rtcs.ru/hwsubtype.asp?id=40&supplier=9&pg=12.; http://www.rtcs.ru/popup_pprop.asp?hwsubtype=40&supplier=9#top.
Умножитель 14 может быть реализован по схеме, представленной в книге: А.Н.Ветров, Л.В.Коверина, В.М.Строев, А.В.Фомичев, А.А.Зотов, В.М.Болыбин, А.Ю.Усков. Цифровые интегральные микросхемы состав и применение (Справочное пособие по информационно-техническому обеспечению проектирования радиоэлектронных средств). - Тамбов: ТГТУ, 1998, http://www.tstu.m/exclusiv/crems/russian/int_mic/index.html, раздел: 8.4. Перемножающее устройство на основе сумматора, рис.272. Умножитель.
Шина 15 обеспечивает взаимосвязь разнополярного АЦП 13, умножителя 14, ОЗУ 16 и включает в себя шину данных, адресную шину и шину управления (http://ixbt. stack..net; http://dtveloper.intel.com/design/iio/; http://firewire/org: http://www. skipstone. com/; http://www. sel. sony. com//SEL/consumer/camcorder/dcr_vx 1000.html и др.).
Оперативно-запоминающее устройство (ОЗУ) - 16 можно реализовать на основе динамических оперативных ЗУ типа К65РУ7 В, стр.128-140, описанных в книге А.Ю Гордон и др. Большие интегральные схемы запоминающих устройств. Справочник под редакцией Ю.Н. Дьякова. - М.: Радио и связь 1990, 287 с.
Устройство поиска максимума, определяющее участок лоцирования, соответствующий максимальной накопленной при суммировании амплитуде сигнала 17 выполнено на микроконтроллере КМ1816 ВЕ48, стр.19 в книге В.В.Сташин, А.В.Урусов, О.В.Мологонцева. Проектирование цифровых устройств на однокристальных микроконтроллерах. - М: Энергоатомиздат, 1990, 221 с.
Схема m из n 18 приведена на рис.3.8, стр.125 в книге: М.П. Мусьяков, И. Д. Миценко. Оптико-электронные системы ближней дальнометрии. - М.: Радо и связь, 1991, 166 с.
Старт-стопное устройство 19 выполнено на микросхеме 8254 фирмы Intel (таймер/счетчик событий), которая описана на http://uch.tashiit.uz/vt/uch/predmetl/uchp/uch2/3/?cifa3.07 (раздел 3.7).
Исполнительный каскад 20 обеспечивает отображение дальности с индикацией на ЖКИ (Матричный «MT-12S2» 2 строки по 12 символов (матрица символа 5×8) и два спецсимвола (1×8 каждый), фирмы МЭЛТ РФ, http://melt.aha.ru/lcd.shtml).
Устройство работает следующим образом.
Сигнал определенной длительности, например, порядка 10 нс излучается лазером с формирующей оптикой 3, попадает на объект, до которого определяется дальность. Рассеянное объектом излучение поступает на формирующий объектив с интерференционным фильтром 5, сюда же попадает и солнечная фоновая засветка и (или) модулированное освещение (прожекторы, вспышки от выстрелов, систем подсвета и т.д.). Здесь на выходе объектива 5 формируются полезный световой сигнал и сигнал солнечной засветки, существенно ослабленный интерференционным фильтром. Эти сигналы фокусируются на светочувствительную площадку фотодетектора 7, например лавинного, фотоприемного тракта 6. На выходе лавинного фотоприемника 7 имеем аддитивную смесь U(t)
U(t)=Uc(t)+U=+U=(t)+Up(t)+Udr(t)+UT(t),
где Uc(t) - полезный сигнал; U= - постоянная составляющая солнечной фоновой засветки; U=(t) - модулирующая составляющая солнечной фоновой засветки, обусловленная случайным изменением коэффициента отражения светового сигнала от поверхности объекта; Up(t) - помеховый сигнал (форма и длительность сигнала помехи определяется процессом обратного рассеяния, происходящим в пространственно распределенной аэрозольной среде); Udr(t) дробовой шум, однозначно связанный с уровнем постоянной составляющей -U= и соответственно мощности фоновой засветки - Рф; Uт(t)- тепловой шум усилительного тракта 9, 10.
Далее такой сигнал поступает на дифференцирующий каскад 8, представленный в схеме построения дальномера в виде разделительного конденсатора, установленного на выходе нагрузки лавинного фотодетектора 7, и входного сопротивления предусилителя 9. Дифференцирующий каскад 8 работает как заградительный фильтр низких частот и отсекает в аддитивной смеси U(t) постоянную составляющую - U=, а также U=(t) - модулирующую составляющую фоновой засветки, обусловленную случайным изменением коэффициента отражения от поверхности объекта; и частично, спектр помехового сигнала - Up(t). В заявляемом варианте выделенный полезный сигнал в аддитивной смеси с шумами (при определенном отношении сигнал-шум) подается на предусилитель 9 и далее на видеоусилитель 10. Операция стробирования по управляемому входу усилителя 10 введена для создания «мертвой зоны» (зона не приема вблизи приемопередатчика), как основное средство снижения обратного рассеяния от аэрозольных помех естественного и искусственного происхождения. Известно, что основная область формирования аэрозольной помехи приходится на ближнюю, прилегающую к дальномеру, область. Поэтому в представленном дальномере «мертвая зона» принята равной Нм=200 м. Если максимальная дальность дальномера составляет Нmax=2000 м, то динамический диапазон изменения сигнала составляет  таким образом, сигнал находится в динамическом диапазоне усиления видеоусилителя 9. Кроме того, стробирование вводится для сокращения вероятности ложных срабатываний дальномера от дробовых и тепловых шумов. Нами показано, что снижение вероятности ложных срабатываний за счет введения операции стробирования равно
таким образом, сигнал находится в динамическом диапазоне усиления видеоусилителя 9. Кроме того, стробирование вводится для сокращения вероятности ложных срабатываний дальномера от дробовых и тепловых шумов. Нами показано, что снижение вероятности ложных срабатываний за счет введения операции стробирования равно
Импульсы с выхода усилителя 10 подаются на блок взвешенного суммирования 11. Блок 11 предназначен для выделения слабых сигналов завуалированных шумами (шум на несколько порядков превышает сигнал) и выделения цели на фоне мешающих факторов (кустарники, деревья и прочие факторы). Пусть максимальная дальность соответствует Нmax=2000 м. При этом вся измеряемая дистанция разбивается на участки разрешения (интервалы), например, равные погрешности ее измерения ΔHj=10 м=±5 м (Δt=66 нс). Длительность излучаемого сигнала и полоса тракта видеоусилителя Δf выбираются таким образом, чтобы  т.е. время корреляции процесса в усилительном тракте было больше интервала разбиения.
т.е. время корреляции процесса в усилительном тракте было больше интервала разбиения.
Для получения максимальной частоты излучения период световых импульсов должен быть равен 2Нmax/С=Тсл=13,2 мкс (fc=75,5 кГц). Отраженный от объекта сигнал, расположенный на дистанции Нi=ni ΔHj (ni-е интервалы) в пределах 2000 м, попадает в приемный тракт. Амплитуда его мала (значительно меньше среднеквадратичного значения шума) и неизвестна. В естественных условиях (отсутствие помехи типа кустарники и др.) на ni-й участок (априорно неизвестный) попадает слабый отраженный сигнал и возможная помеха (сигнал и шум представляют аддитивная смесь). А на все остальные поступает разнополярный шум, изменяющийся как во времени, так по амплитуде и полярности. С момента излучения j-го импульса последовательно через Δt=66 нс (длительность интервала разбиения) информация каждого ni-го интервала после устройства выборки-хранения 12 оцифровывается (фиксируется амплитуда в цифровом коде) разнополярным АЦП 13 и через шину 15 заносится в свою отведенную для этого интервала ячейку памяти ОЗУ 16 с весовым коэффициентом w за счет введения умножителя 14. Закон изменения w уточняется после проведения экспериментальных исследований, но предварительно может быть оценен как  .
.
Следует отметить, что операция умножения оцифрованного сигнала на весовой коэффициент w выравнивает чувствительность системы по дальности. Выравнивание чувствительности по дальности адекватно введению операции программной регулировки усиления (ПРУ), которая, как нами показано, снижает амплитуду сигнала обратного рассеяния от аэрозольных помех более чем на 40дБ.
«Мертвая зона», как ранее отмечено, формируется для сокращения уровня наиболее интенсивной помехи, находящейся в ближней зоне, и устранения импульсов переходных процессов, получаемых при стробировании видеоусилителя 10. «Мертвая зона» - это ближняя зона, где не требуется вычисления расстояния. Для цифрового блока эта зона соответствует памяти из ni ячеек. В дальномере принимается «мертвая зона», равная Нм=200 м, что соответствует nм=20. Процесс занесения оцифрованной амплитуды в память начинается с nм=40 до nmax=Hmax/ΔH=2000/10=200. Под каждую оцифрованную выборку (nmax-nм=160) отводится свой элемент памяти. В нашем случае допускается заносить в память оцифрованный сигнал в выборке Δt с задержкой на kΔt<0,2c после времени оцифровки сигнала. Динамический диапазон изменения смеси сигнала и шума (двухполярный шум и однополярный сигнал) соответствует 8 разрядам АЦП. Регистрируемая АЦП 13 амплитуда младшего разряда - минимально возможная, обеспечивающая стабильность оцифровки в интервале температур.
Процедура оцифровки всего интервала измерения Т=13,3 мкс и процесс суммирования при занесении в память 160 ячеек повторяется для каждого последующего излучаемого импульса (каждая цифровая выборка в свои отведенные i-е ячейки памяти: первая с первой, вторая со второй и т.д.). Оцифрованные выборки смеси сигнала и шума суммируются указанным образом на каждом периоде по мере их поступления и так в течении N=75000 импульсов излучения (интервал измерения 1 с, частота излучения 37,5 кГц). При этом шумы при суммировании уменьшаются в  , что эквивалентно увеличению сигнала в
, что эквивалентно увеличению сигнала в  раз. При полном цикле анализа (t=1 с) отношение сигнал/шум в каждой ячейке увеличивается в
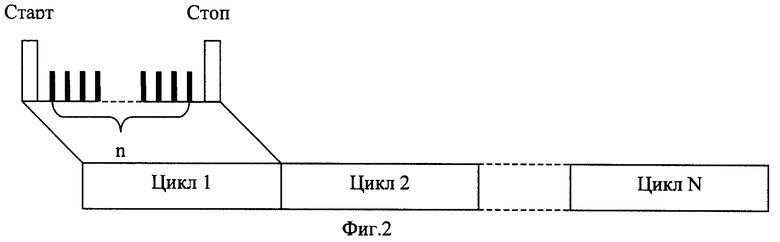
раз. При полном цикле анализа (t=1 с) отношение сигнал/шум в каждой ячейке увеличивается в  =274 раза. После этого выявляется номер ячейки с максимальной амплитудой накопленного сигнала - Umax). Эту операцию выполняет устройство поиска максимума, определяющее участок лоцирования, соответствующий максимальной накопленной при суммировании амплитуде сигнала 17, при появлении управляющего сигнала, поступающего с выхода формирователя стробирующего сигнала 4 (с выхода внутреннего таймера) после отсчета им заданного количества стробирующих импульсов. Временная последовательность сигналов показана на фиг.2.
=274 раза. После этого выявляется номер ячейки с максимальной амплитудой накопленного сигнала - Umax). Эту операцию выполняет устройство поиска максимума, определяющее участок лоцирования, соответствующий максимальной накопленной при суммировании амплитуде сигнала 17, при появлении управляющего сигнала, поступающего с выхода формирователя стробирующего сигнала 4 (с выхода внутреннего таймера) после отсчета им заданного количества стробирующих импульсов. Временная последовательность сигналов показана на фиг.2.
Если выявляется несколько подряд расположенных ячеек с одинаковой амплитудой, то выбирается ячейка, соответствующая максимальной дальности. Если при анализе амплитуд появляется ряд максимумов в разнесенных ячейках, то в качестве максимальной фиксируется последняя ячейка (процесс регистрации видимой цели, маскируемой кустарниками или локализованной помехой). При выявлении одного максимума определятся порядковый номер j-й ячейки с максимальной амплитудой. При ограниченном времени измерения дальности допускается проверка максимумов при N<75000, т.к. на практике дисперсия шума при суммировании разнополярных выбросов шума при накоплении остается равной дисперсии шума до суммирования.
Далее устройством поиска максимума, определяющем участок лоцирования, соответствующего максимальной накопленной при суммировании амплитуде сигнала 17 осуществляется процедура выявления j-й ячейки с максимальной амплитудой или последней ячейки с определенным максимумом амплитуды. Определение достоверности (вероятности) наличия выявленного максимума или выбранной ячейки проводится по следующей логике: например, на пяти m=5 следующих после N излучаемых импульсов определяется допустимое число пропусков и тем самым находится вероятность обнаружения максимума. Если из ΔN=m=5 последующих импульсов излучения происходит повторение номера ячейки с максимальной амплитудой в течение m=3 (пропуск n=2), то информация с выделенной j-й ячейки в старт-стопном измерителе дальности 20 по номеру ячейки преобразуется в дальность Н=(jmax-1) [66·10-9C/2+(1/2) (66·10-9С/2)], где С=3·10, jmax - номер ячейки появления максимума. Соотношение между m/n определяет достоверность появления максимума. Далее полученная информация индицируется на ЖКИ - 20 (исполнительный каскад).
При невыполнении условия проверки m/n операция накопления и определения номера ячейки с максимальной амплитудой продолжается до тех пор, пока проверка не даст положительного результата. Инерционность цифровой системы при этом не должна превышать, например, 1,2 с. На индикаторе исполняющего устройства 20 отображается местоположение последней цели. Кроме того, прибор запоминает местоположение всех максимумов. По желанию, возможен просмотр дальностей, соответствующих промежуточным максимумам, включая первый.
Предложенный вариант построения импульсного дальномера, сохраняя простоту и высокую помехоустойчивость импульсного метода дальнометрии позволяет увеличить отношение сигнал - шум или соответственно уменьшить мощность излучения лазера, примерно в 274 раза, что адекватно увеличению дальности обнаружения в √274=16 раз при сохранении исходных энергетических параметров системы.
Таким образом, введение между выходом фотоприемного тракта 6 и входом старт-стопного измерителя дальности 19 последовательно подключенных блока взвешенного суммирования 11 сигнала на отдельных следующих подряд участках, равных, например, грубой абсолютной погрешности измерения дальности, с накоплением информации и с повторением суммирования после каждого периода излучения в течение времени, достаточного для выделения сигнала из шума, например в течение инерционности системы, а также устройства поиска максимума, определяющего участок лоцирования, соответствующий максимальной накопленной при суммировании амплитуде сигнала 17, и счетчика m из n 18 вероятностной оценки достоверности регистрации ячейки с максимальной амплитудой накопленного сигнала позволяет резко увеличить потенциал системы (отношение мощности излучения к пороговой чувствительности фотоприемного тракта в логарифмическом масштабе), что позволяет при тех же мощностях излучателя существенно увеличить радиус действия дальномера и обеспечить обнаружение и выделения сигнала завуалированного шумами на несколько порядков, при этом обеспечивая высокую вероятность селекции лоцируемого объекта. За счет введения блока взвешенного суммирования 11 можно улучшить пороговую чувствительность или при сохранении потенциала системы резко уменьшить мощность излучателя, сократив тем самым массогабаритные характеристики всего дальномера.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНЫЙ ИМПУЛЬСНЫЙ ДАЛЬНОМЕР | 2014 |
|
RU2551700C1 |
| ВЗРЫВАТЕЛЬ | 2007 |
|
RU2362969C2 |
| КОМБИНИРОВАННЫЙ ОПТИКО-ЭЛЕКТРОННЫЙ ПРИБОР | 2011 |
|
RU2497062C2 |
| Лазерный импульсный дальномер | 2022 |
|
RU2791186C1 |
| СПОСОБ ЗАЩИТЫ БРОНЕТАНКОВОЙ ТЕХНИКИ | 2008 |
|
RU2373482C2 |
| АКТИВНО-ИМПУЛЬСНЫЙ ТЕЛЕВИЗИОННЫЙ ПРИБОР НОЧНОГО ВИДЕНИЯ | 2016 |
|
RU2645122C2 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2006 |
|
RU2324145C1 |
| ВЫСОКОИНФОРМАТИВНЫЙ РАСПОЗНАЮЩИЙ ДАЛЬНОМЕР | 2003 |
|
RU2254557C1 |
| Лазерный обнаружитель оптических сигналов | 2023 |
|
RU2816284C1 |
| ПРИЕМНИК ИМПУЛЬСНОГО ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2012 |
|
RU2511069C1 |
Дальномер содержит соединенные между собой задающий импульсный генератор, генератор накачки и лазер, а также формирующую оптику, оптически соединеную с фотоприемным трактом, состоящим из последовательно соединенных фотодетектора, дифференцирующего каскада, предусилителя и видеоусилителя, выход которого, являющийся выходом фотоприемного тракта, последовательно соединен со старт-стопным измерителем дальности и индикатором дальности. Лазер оптически соединен с формирователем стробирующего сигнала, выход которого соединен с управляемыми входами видеоусилителя и старт-стопного измерителя дальности. Между выходом фотоприемного тракта и входом старт-стопного измерителя дальности введены последовательно подключенные блок взвешенного разнополярного суммирования сигналов, принимаемых от отдельных, подряд расположенных по дальности участков лоцирования, устройство поиска максимума, определяющее участок лоцирования, соответствующий максимальной, накопленной при суммировании амплитуде сигнала, и счетчик m из n для проверки достоверности селекции участка лоцирования, соответствующего максимальной накопленной при суммировании амплитуде сигнала, которые по управляемым входам соединены с выходом формирователя стробирующего сигнала. Технический результат - снижение пороговой чувствительности и улучшение массогабаритных показателей дальномера. 2 ил.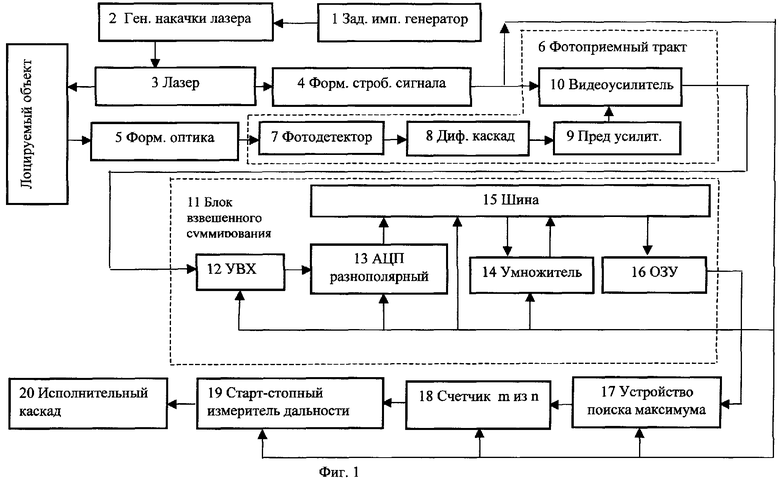
Лазерный импульсный дальномер, состоящий из соединенных между собой задающего импульсного генератора, генератора накачки и лазера, а также формирующей оптики, выход которой оптически соединен с фотоприемным трактом, состоящим из последовательно соединенных фотодетектора, дифференцирующего каскада, предусилителя и видеоусилителя, выход которого, являющийся выходом фотоприемного тракта, последовательно соединен со старт-стопным измерителем дальности и индикатором дальности, а лазер оптически соединен с формирователем стробирующего сигнала, выход которого соединен с управляемым входом видеоусилителя и с управляемым входом старт-стопного измерителя дальности, отличающийся тем, что между выходом фотоприемного тракта и входом старт-стопного измерителя дальности в него введены последовательно подключенные блок взвешенного разнополярного суммирования сигналов, принимаемых от отдельных подряд расположенных по дальности участков лоцирования, а также устройство поиска максимума, определяющее участок лоцирования, соответствующий максимальной накопленной при суммировании амплитуде сигнала, и счетчик m из n для проверки достоверности селекции участка лоцирования, соответствующего максимальной накопленной при суммировании амплитуде сигнала, которые по управляемым входам соединены с выходом формирователя стробирующего сигнала.
| US 3666367 А, 30.05.1972 | |||
| US 5025143 А, 18.06.1991 | |||
| US 5828443 А, 27.10.1998 | |||
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 1998 |
|
RU2135954C1 |

