Изобретение относится к области авиационной техники, в частности к системам ручного управления самолетом, и предназначено для реализации на воздушных судах любого назначения. Система позволяет отключать одно из двух ручных управляющих устройств, например штурвальную колонку в аварийных ситуациях.
Известна система ручного управления самолетом, состоящая из двух ручных управляющих устройств, взаимосвязанных с механизмом разъединения, имеющим рычаг разъединения, и устройства управления механизмом разъединения, имеющего рукоятку (см. патент РФ №2178373, МКИ В 64 С 13/30, В 64 С 13/12, 28.12.2000 г.).
Известная система ручного управления выполнена в виде двух ручек управления и механизма разъединения в виде шарнирно соединенных между собой тяг, рычагов и рукоятки разъединения.
Недостатком данной системы ручного управления самолетом является то, что в ней разъединяемой является только одна ручка управления, то есть в случае возникновения нештатной ситуации пилот, работающий с отключаемой ручкой управления, не может взять управление на себя.
Задачей настоящего изобретения является расширение эксплуатационных возможностей системы ручного управления самолетом и повышение безопасности полета.
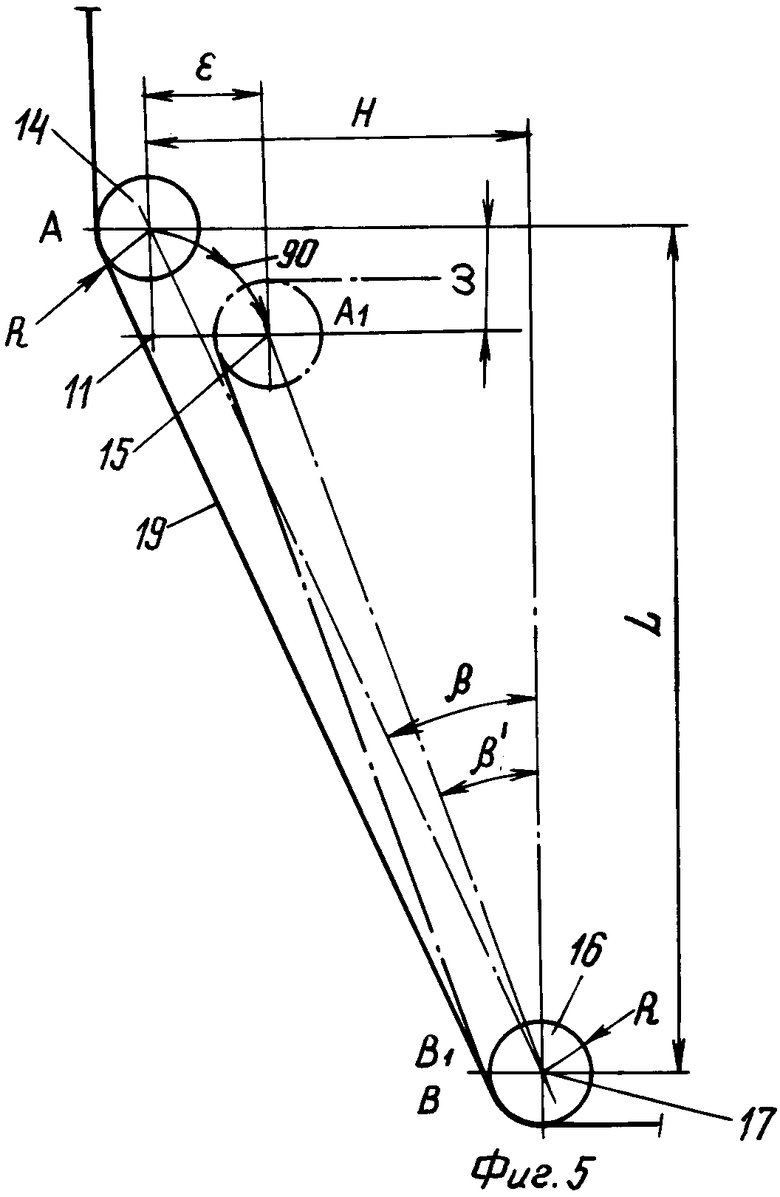
Решение технической задачи достигается тем, что система ручного управления самолетом, состоящая из двух разъединяемых ручных управляющих устройств, взаимосвязанных с механизмом разъединения, имеющим рычаг разъединения, и устройства управления механизмом разъединения, имеющего рукоятку, снабжена пультом управления, установленным между ручными управляющими устройствами на горизонтальной относительно корпуса самолета оси поворота с возможностью откидывания на угол 90°, устройство управления механизмом разъединения выполнено в виде тросовой проводки, один конец которой соединен с рукояткой, размещенной на пульте управления, а другой через опорный ролик, смонтированный на пульте управления, и два вспомогательных ролика, смонтированных на элементах каркаса самолета, с рычагом механизма разъединения, при этом механизм разъединения установлен неподвижно относительно элементов каркаса самолета, а ось опорного ролика смещена относительно горизонтальной оси поворота пульта управления с возможностью опускания опорного ролика для компенсации выборки троса от наматывания на опорный и вспомогательный ролики при откидывании пульта управления. Величина смещения опорного ролика от горизонтальной оси поворота пульта управления определена соотношением:
L/cosβ=(L-ε)/cosβ'+πR/2
где: ε - величина смещения опорного ролика относительно горизонтальной оси поворота пульта управления;
L - расстояние по вертикали между осями опорного и вспомогательного роликов до отклонения пульта;
Н - расстояние по горизонтали между осями роликов опорного и вспомогательного роликов до отклонения пульта;
R - радиус роликов;
β - arctg H/L;
β'- arctg (H-ε)/(L-ε)
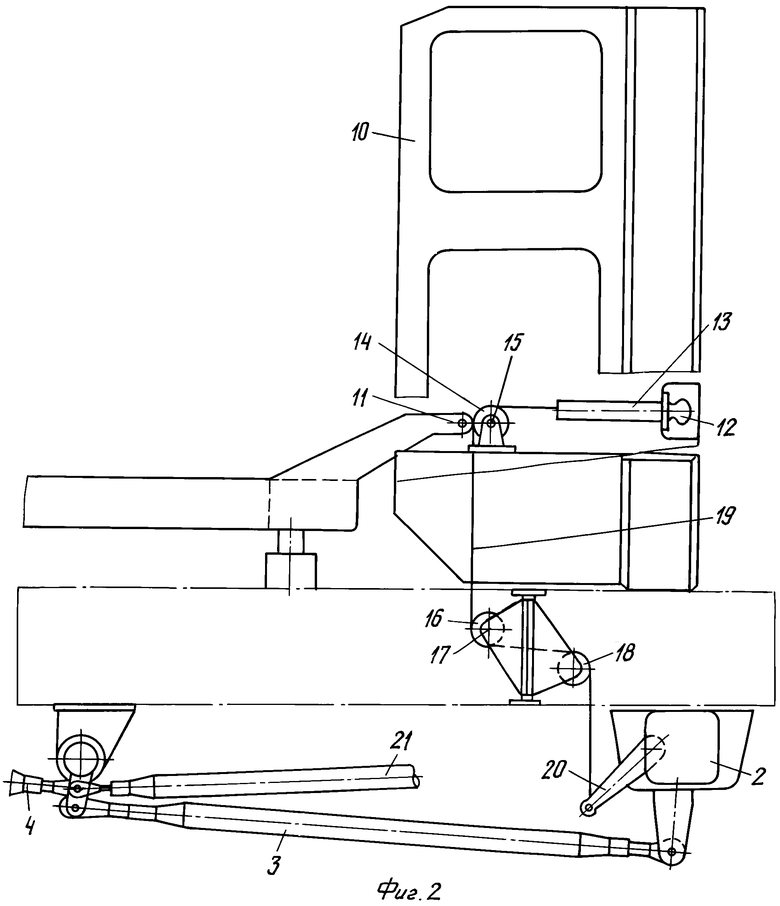
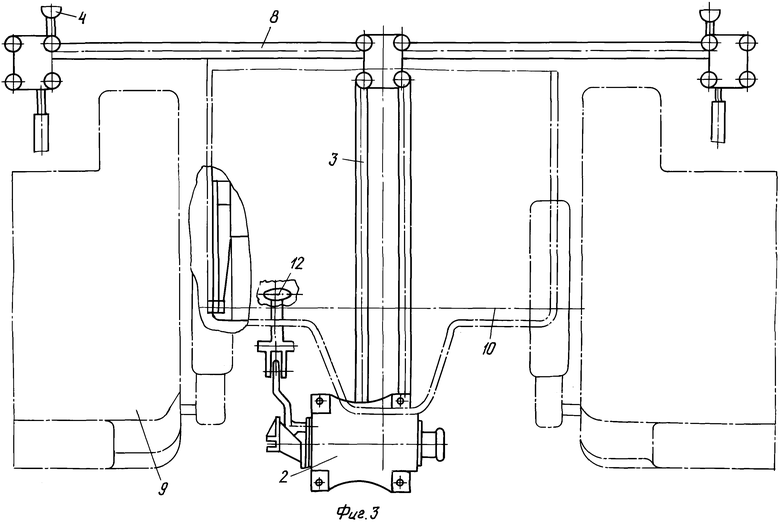
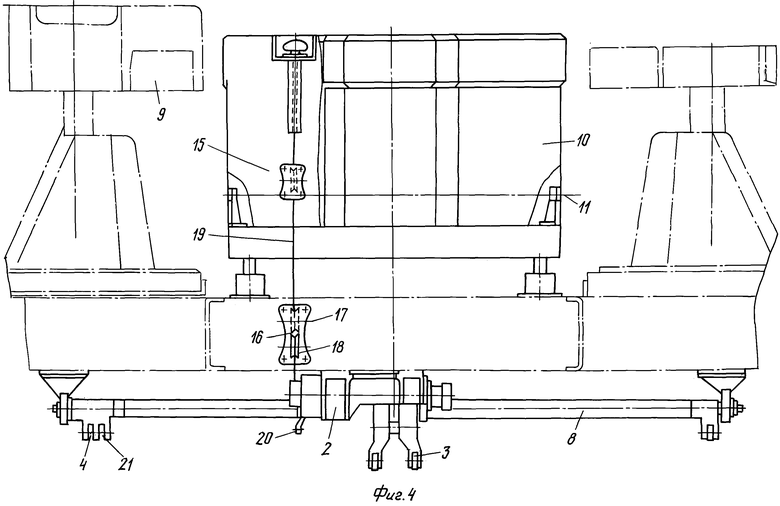
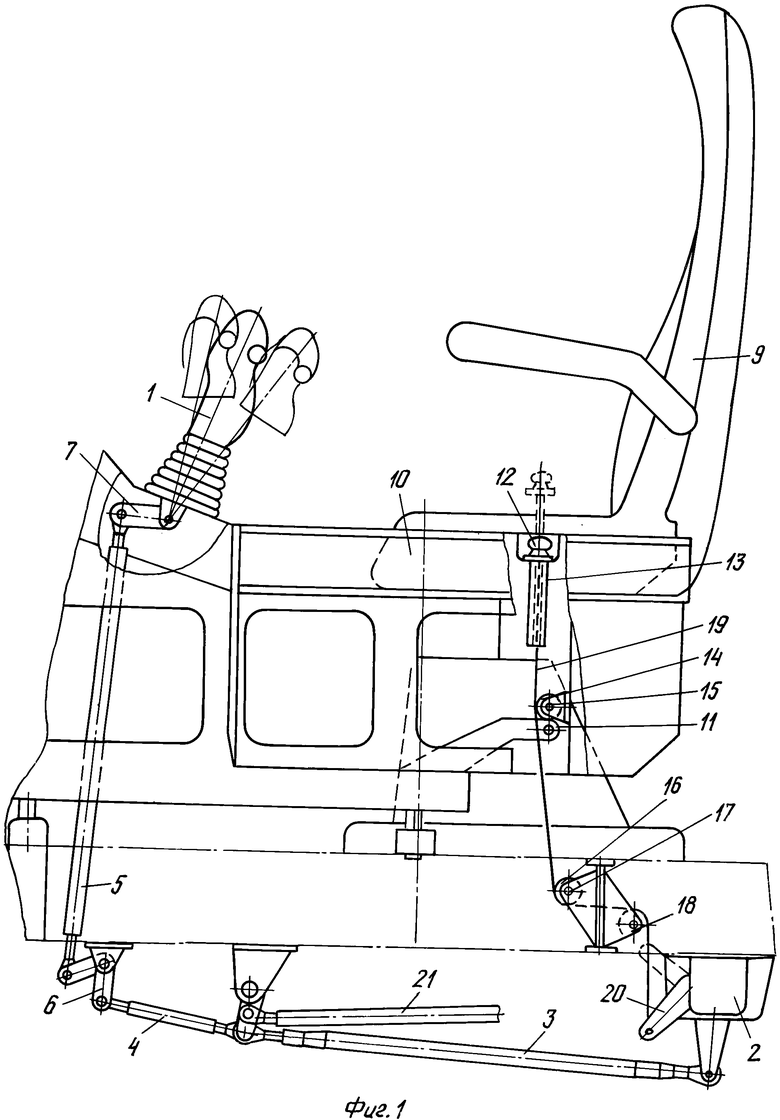
Изобретение поясняется чертежами. На фиг.1 показана фронтальная проекция системы ручного управления самолетом при нормальном положении пульта управления. На фиг.2 - фронтальная проекция системы ручного управления самолетом при откинутом положении пульта управления. На фиг.3 показан вид сверху. На фиг.4 показан вид справа. На фиг.5 дана кинематическая схема части тросовой проводки.
Система ручного управления самолетом состоит из двух ручных управляющих устройств 1 (ручек управления или штурвалов) и механизма разъединения 2 механической связи между ними, установленного неподвижно относительно корпуса самолета. Механизм разъединения 2 соединен с каждым из ручных управляющих устройств шарнирными тягами 3,4 и 5, качалками 6, рычагами 7 и соосно расположенными валами 8, объединяющими через механизм разъединения 2 систему ручного управления самолетом правым и левым летчиками. К ручным управляющим устройствам примыкают сиденья 9 летчиков, между которыми установлен откидной пульт управления 10, например двигателями, с возможностью вращения относительно оси 11 на угол, равный 90°. Механизм разъединения 2 снабжен устройством управления, выполненным в виде тросовой проводки и рукоятки 12, которая размещена в направляющей обойме 13, расположенной на пульте управления 10. В состав устройства управления также входят опорный ролик 14 с осью вращения 15, вспомогательный ролик 16 с осью вращения 17 и вспомогательный ролик 18. Вспомогательные ролики 16 и 18 смонтированы на элементах каркаса самолета, а опорный ролик 14 - на пульте управления 10. Трос 19 тросовой проводки одним своим концом связан с рукояткой, а другим - с рычагом разъединения 20, которым снабжен механизм разъединения 2. С помощью шарнирной тяги 21 система ручного управления самолетом соединена с механической проводкой для передачи управляющего усилия к рулю высоты. Ось 15 опорного ролика 14, установленного на пульте управления 10, смещена относительно оси 11 для компенсации длины тросовой проводки при откидывании пульта управления 10. Величина смещения ε определена по формуле:
L/cos β=(L-ε)/cos β'+πR/2 путем подбора значений L и Н.
Формула определена, исходя из равенства участков тросовой проводки (АВ=А'В1) до и после отклонения пульта на 90° соответственно (см. фиг.5).
Расчеты показывают также постоянство расстояния упомянутых участков на промежуточных углах отклонения пульта управления от 0 до 90°.
Устройство работает следующим образом.
При откидывании пульта управления 10 на угол 90° для проведения регламентных или ремонтных работ происходит его поворот относительно оси 11 и отклоняемой части тросовой проводки, заключенной между вытяжной рукояткой 12 и вспомогательным роликом 16. С одной стороны трос наматывается на опорный ролик 14 и на вспомогательный ролик 16, выбирая часть троса, а с другой стороны опорный ролик 14 опускается по дуге окружности, компенсируя при этом выборку троса. При правильно выбранной величине смещения s опорного ролика 14 общая длина троса за счет равенства АВ=А'В1 остается неизменной, что позволяет откидывать пульт управления, не опасаясь срабатывания механизма разъединения 2. Срабатывание механизма разъединения осуществляется в полете при возникновении аварийной ситуации в случае утраты кем-либо из летчиков способности управлять самолетом. В этом случае вытягиванием рукоятки 12, связанной тросовой проводкой с рычагом разъединения 20, осуществляется разъединение механической связи между ручными управляющими устройствами правого и левого летчиков.
Изобретение позволяет значительно расширить эксплуатационные возможности системы ручного управления самолетом, а также повысить безопасность полета.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU1707896C |
| СИСТЕМА УПРАВЛЕНИЯ РУЛЕВЫМИ ПОВЕРХНОСТЯМИ САМОЛЕТА | 2000 |
|
RU2178372C2 |
| КРЕСЛО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА С ОПОРНО-ПОВОРОТНЫМ МЕХАНИЗМОМ | 2020 |
|
RU2752434C1 |
| УСТРОЙСТВО ДЛЯ РАСЦЕПЛЕНИЯ ТРОСОВОЙ ПРОВОДКИ СИСТЕМЫ УПРАВЛЕНИЯ | 2008 |
|
RU2374132C2 |
| КОМАНДНЫЙ ПОСТ РУЧНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1996 |
|
RU2122509C1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЗИРОВАННОЙ ПОГРУЗКИ | 1967 |
|
SU195895A1 |
| КОМФОРТНОЕ ПАССАЖИРСКОЕ КРЕСЛО ПОВЫШЕННОЙ НАДЕЖНОСТИ | 2008 |
|
RU2419577C2 |
| Платформа с механизмом погрузки для перевозки миномета | 2024 |
|
RU2841415C1 |
| УСТРОЙСТВО ТОРМОЖЕНИЯ КОЛЕС ШАССИ ВЕРТОЛЕТА | 2019 |
|
RU2710993C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЗАМКАМИ ШАССИ САМОЛЕТА | 1999 |
|
RU2164879C1 |
Изобретение относится к авиационной технике. Система ручного управления самолетом состоит из двух разъединяемых ручных управляющих устройств 1, взаимосвязанных с механизмом разъединения 2, имеющим рычаг разъединения 20, и устройства управления механизмом разъединения. Между ручными управляющими устройствами 1 установлен на горизонтальной оси 15 с возможностью откидывания на угол 90° пульт управления 10. Устройство управления механизмом разъединения выполнено в виде тросовой проводки, одним концом соединенной с рукояткой 12, размещенной на пульте управления, а другим через опорный ролик 14, смонтированный на пульте управления, и два вспомогательных ролика 16 и 18, смонтированных на элементах каркаса самолета, с рычагом механизма разъединения. Ось опорного ролика 14 смещена относительно горизонтальной оси поворота пульта управления с возможностью опускания опорного ролика для компенсации выборки троса от наматывания на опорный и вспомогательный ролики при откидывании пульта управления. Изобретение расширяет эксплуатационные возможности. 5 ил.
Система ручного управления самолетом, состоящая из двух ручных управляющих устройств, взаимосвязанных с механизмом разъединения, имеющим рычаг разъединения, и устройства управления механизмом разъединения, имеющего рукоятку, отличающаяся тем, что она снабжена пультом управления, установленным между ручными управляющими устройствами на горизонтальной относительно корпуса самолета оси поворота с возможностью откидывания на угол 90°, устройство управления механизмом разъединения выполнено в виде тросовой проводки, один конец которой соединен с рукояткой, размещенной на пульте управления, а другой через опорный ролик, смонтированный на пульте управления, и два вспомогательных ролика, смонтированных на элементах каркаса самолета, с рычагом механизма разъединения, при этом механизм разъединения установлен неподвижно относительно элементов каркаса самолета, а ось опорного ролика смещена относительно горизонтальной оси поворота пульта управления с возможностью опускания опорного ролика по дуге окружности для компенсации выборки троса от наматывания на опорный и вспомогательный ролики при откидывании пульта управления.
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1999 |
|
RU2178374C2 |
| US 5711496 А, 27.01.1998 | |||
| US 5551652 A, 03.09.1996 | |||
| US 5924331 A, 20.07.1999. | |||

