Способ оперативного сопровождения и управления наземными транспортными средствами относится к области контроля и управления движением различных транспортных средств, преимущественно автомобильных, и может быть использован для централизованного контроля мест нахождения угнанных транспортных средств.
Известны способы контроля движения транспортных средств, например, реализованный в патенте РФ №2158963, G 08 G 5/06, Бюл. №31, 2000, заключающийся в том, что на соответствующем транспортном средстве принимают радиосигналы от спутников глобальной навигационной системы, определяют координаты нахождения транспортного средства (ТС) в реальном масштабе времени, формируют пакет информации с дополнительным включением в него кода номера и состояния отдельных подсистем ТС, передают данный пакет на центральный диспетчерский пункт (ЦДП) через выделенный цифровой канал, где этот пакет обрабатывают и осуществляют управление подсистемами ТС через упомянутый канал.
Недостатком способа является то, что при угоне транспортного средства нельзя отличить информацию о нем от информации других транспортных средств до тех пор, пока не будет получено сообщение на ЦДП от владельца и пока на ЦДП не введут в систему специальную программу. На это уходит много времени.
Известен также способ контроля транспортировки грузов, описанный в патенте РФ №2157565, G 08 C 1/123, бюл. №28, 2000 г., заключающийся в том, что на подвижном ТС принимают через специальный контроллер навигационные сигналы от спутников глобальной системы радионавигации, выделяют из принятых сигналов текущие координаты ТС, формируют пакет информации с включением в него кода номера ТС и передают через систему сотовой связи на ЦДП, где информацию периодически принимают от данного и других ТС, производят ее обработку, хранение и отображение, а при возникновении нештатной ситуации устанавливают с владельцем ТС двустороннюю речевую связь или принимают иные меры. Этот способ принят за прототип.
Он имеет следующие недостатки:
1) При угоне ТС на ЦДП нельзя отличить информацию о нем от информации неугнанных ТС.
2) По объективным и субъективным причинам информация о факте угона ТС поступает на ЦДП по другим каналам с опозданием, отчего поиск координат нахождения угнанного ТС часто становится бесполезным.
3) Так как угнанное транспортное средство находится часто в движении, то для его задержания требуется достаточно большие время и материальные затраты.
Задача, решаемая изобретением, заключается в более быстром автоматическом определении факта угона ТС, координат его нахождения и в сокращении временных и материальных затрат на его возврат владельцу.
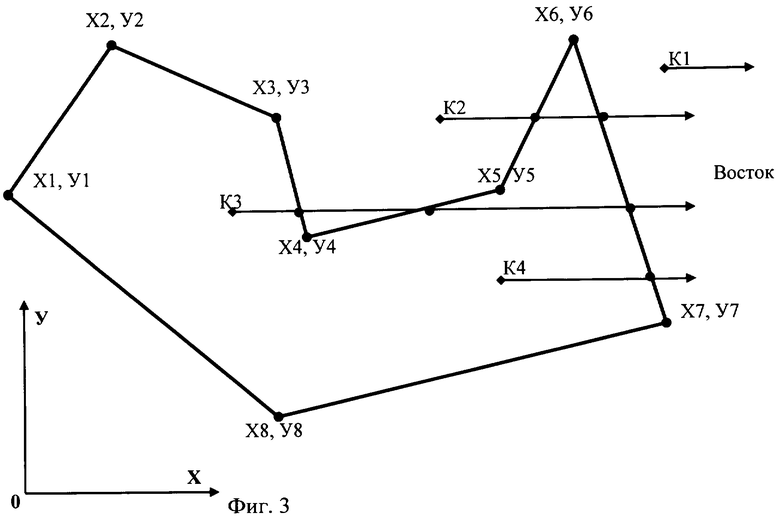
Это достигается тем, что в способе контроля движения ТС, заключающемся в том, что на ТС на специальный контроллер принимают сигналы от глобальной спутниковой системы радионавигации, выделяют из принятых сигналов текущие координаты нахождения ТС, определяют время и скорость ТС, формируют пакет информации с включением в него кода номера ТС и передают этот пакет информации через систему сотовой связи на ЦДП, где информацию периодически принимают от данного и других ТС, производят ее обработку, хранение и отображение, а при возникновении нештатной ситуации устанавливают с водителем ТС двустороннюю речевую связь или принимают иные меры, при этом в момент выхода водителя из транспортного средства в память контроллера ТС записывают охранный код и в пакет передаваемой на ЦДП информации к коду номера ТС из памяти контроллера добавляют признак охранного кода, который на ЦДП выделяют из пакета принимаемой информации, идентифицируют его как сигнал постановки транспортного средства на охрану, а при движении транспортного средства без участия водителя и наличии признака охранного кода в пакет передаваемой информации с ТС дополнительно вводят код признака угона, который на центральном диспетчерском пункте выделяют, идентифицируют его как тревожный сигнал, отображают на индикации, запоминают и формируют обратный пакет с координатами охранной зоны, передают его на ТС, где его расшифровывают, а координаты охранной зоны записывают в энергонезависимую память, затем отслеживают место нахождения транспортного средства в охранной зоне и при выходе транспортного средства из охранной зоны периодически формируют сигналы отключения зажигания и включения звуковой сигнализации на заданное время, после чего формируют сигналы включения зажигания и выключения звуковой сигнализации, при этом на ЦДП принимают необходимые меры, после выполнения которых формируют код снятия признаков охраны и угона, записывают в пакет передаваемой на транспортное средство информации, где этот код расшифровывают и исключают охранный код, коды признаков охраны и угона из памяти бортового контроллера транспортного средства. Координаты охранной зоны на ЦДП формируют в виде последовательности пар геодезических координат широта/долгота, образующих замкнутый контур, а отслеживание места нахождения ТС в охранной зоне и выход из нее осуществляют путем совмещения в одной системе координат контура охранной зоны и координаты места нахождения ТС, а затем строят луч, исходящий из этой координаты и параллельный одному из направлений восток, запад, север, юг; определяют количество пересечений этим лучом линий контура охранной зоны, при этом по четному количеству пересечений определяют момент и факт выхода ТС из охранной зоны.
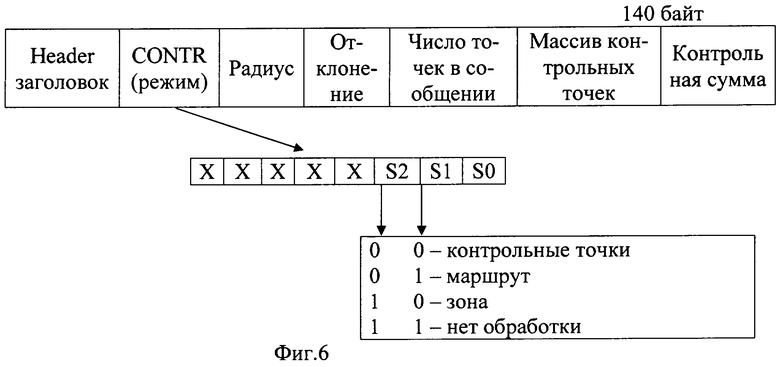
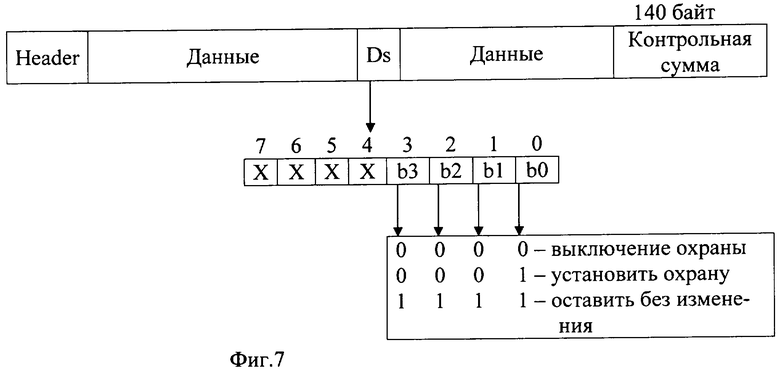
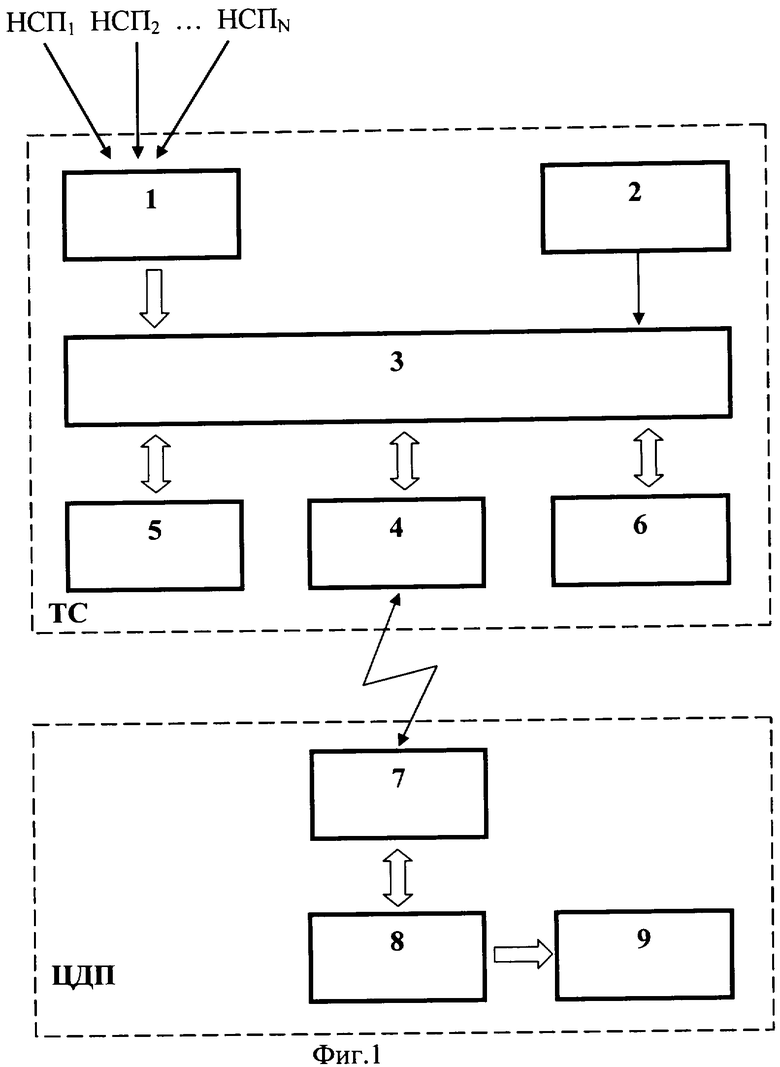
Сущность предлагаемого способа оперативного сопровождения и управления наземными транспортными средствами поясняется чертежами, где на фиг.1 приведена общая структурная схема реализации способа, на фиг.2 - алгоритм функционирования системы по данному способу, на фиг.3, 4 – принцип и алгоритм отслеживания ТС в охранной зоне с определением момента выхода из нее, на фиг.5, 6 - соответственно формат передаваемого с ТС сообщения (пакета) и формат и содержание пакета информации, передаваемого с ЦЦП на ТС в режиме записи координат охранной зоны. На фиг.7 - формат пакета, передаваемого с ЦДП на ТС в режиме управления бортовыми подсистемами, включая информацию о снятии признаков охраны и угона.
На чертежах приняты следующие обозначения:
1 - приемник сигналов от глобальной навигационной спутниковой системы (НСП1-НСПn - навигационные спутники) с процессором определения координат нахождения ТС, скорости и времени по Гринвичу;
2 - устройство ввода охранного кода;
3 - контроллер транспортного средства (ТС);
4 - приемопередатчик пакетов цифровой информации по выделенному каналу сотовой связи, расположенный на ТС;
5 - энергонезависимая память;
6 - бортовые подсистемы ТС;
7 - приемопередатчик пакетов цифровой информации по выделенному каналу сотовой связи, расположенный на ЦДП;
8 - блок обработки пакетов цифровой информации на ЦДП;
9 - блок индикации и сигнализации;
A1 - операция приема сигналов с навигационных спутников HCП1-НСПn;
A2 - операция определения координат, времени по Гринвичу и скорости ТС с преобразованием данных в цифровую форму;
A3 - операция считывания данных, полученных на операции А2, и запись в память контроллера ТС;
A4 - формирование пакета данных и передача его на ЦДП;
A5 - операция считывания информации с устройства ввода охранного кода, его запоминание и формирование признака охранного кода;
A6 - операция оценки наличия признака охранного кода;
A7 - операция включения признака охранного кода в пакет и передача его на ЦДП;
A8 - операция приема сообщения (пакета) на ЦДП, идентификация признака охранного кода и постановка под охрану ТС;
A9 - операция оценки движения ТС при наличии признака охранного кода;
A10 - операция формирования признака угона контроллером ТС, его запись в пакет с передачей на ЦДП по выделенному каналу сотовой связи через приемопередатчик, например, GSM;
A11 - операция приема сообщения на ЦДП, выделения признака угона и формирование обратного сообщения с координатами охранной зоны;
A12 - операция приема ТС сообщения (пакета) с координатами охранной зоны и их запись в энергонезависимую память;
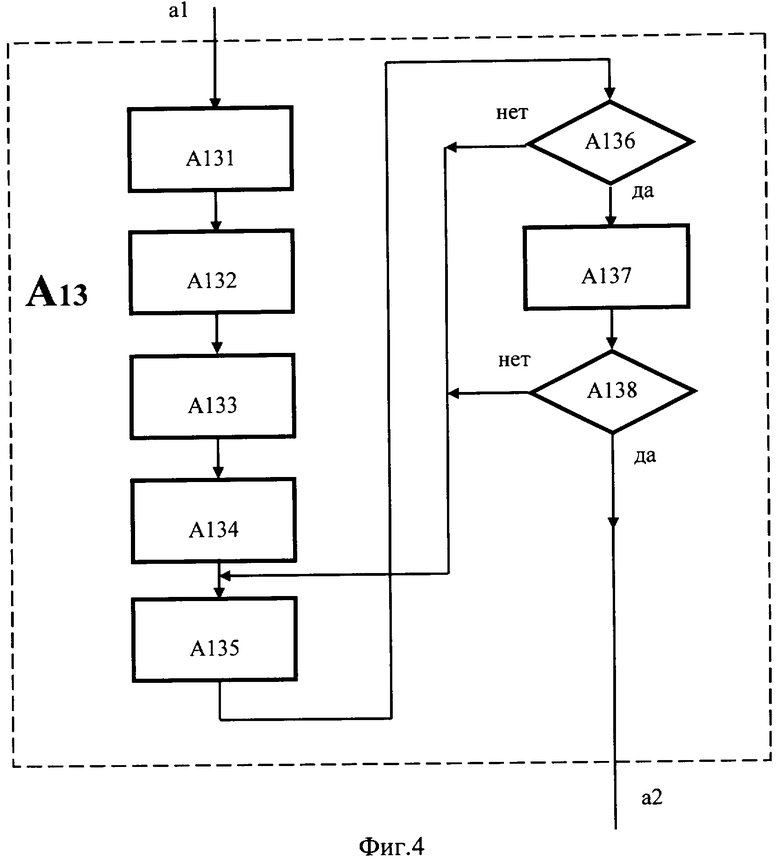
A13 - операция отслеживания места нахождения ТС в охранной зоне и определение момента выхода из зоны;
A14 - операция отключения зажигания и включения звуковой сигнализации через бортовые подсистемы;
A15 - операция выдержки заданного времени;
A16 - операция включения зажигания и выключения звуковой сигнализации;
A17 - принятие необходимых мер обслуживающим персоналом;
A18 - оценка результатов принятых мер;
A19 - операция формирования на ЦДП команды о снятии признака угона и охранного кода ТС, запись ее в пакет информации и передача пакета по выделенному каналу сотовой связи на ТС;
А20 - операция приема ТС пакета информации и его расшифровка;
А21 - операция исключения признака угона и охранного кода из памяти бортового контроллера;
А131 - размещение в памяти бортового контроллера контура охранной зоны в системе координат X, Y (восток, север);
A132 - построение линий контура охранной зоны в координатах X, Y;
А133 - помещение координат точки нахождения ТС на плоскость в координатах X, Y;
A134 - построение луча, параллельного направлению ОХ и исходящего из точки нахождения ТС;
A135 - расчет и построение точек пересечения луча с линиями контура охранной зоны;
А136 - условие наличия точки пересечения луча с соответствующей линией контура охранной зоны;
A137 - подсчет количества пересечений;
A138 - условие определения четного количества пересечений, условие выхода ТС из охранной зоны;
Х1, Y1; - координаты точек контура охранной зоны;
...
Х8, Y8
K1...K4 - возможные точки места нахождения ТС;
Header - заголовок пакета;
DTail - остаток сообщения с предыдущего пакета;
mFD - маска формата вывода данных;
D - байт первого информационного блока, в котором содержатся признаки охраны и угона;
Ds - байт с признаками исключения режимов охраны и угона;
CONTR - байт с признаками режимов охраны;
So - обновление информации (0 - всей, 1 - добавление новой);
S1, S2 - режимы задания контрольных точек (00 - просто точки, 01 - маршрут, 10 - зона, 11 - нет обработки);
b0-b3 - четыре младших разряда байта с признаками исключения режимов охраны и угона.
Функционирование схемы по данному способу осуществляется следующим образом (фиг.1, 2). После установки модуля на ТС и включения питания с навигационных спутников НСП1-НСПn принимают сигналы на приемник сигналов 1, где происходит преобразование сигналов в цифровую форму, определение координаты нахождения ТС (долгота, широта), скорость ТС и время по Гринвичу. Приемник сигналов выполнен, например, в виде Gps - приемника (операции А1 и А2 фиг.2). Данные с приемника 1 считывают контроллером 3 и сохраняют в его памяти (операция А3). При накоплении заданного количества данных формируют пакет информации, в который включают код транспортного средства (операция А4) и передают через систему сотовой связи на центральный диспетчерский пункт по выделенному каналу связи 4, 7. Следом считывают данные с устройства ввода охранного кода 2, выполненного, например, в виде радиобрелока или скрытой кнопки, нажатие которой означает команду ввода охранного кода в память контроллера 3 (операция А5). При наличии охранного кода в памяти контроллер 3 осуществляет формирование признака охранного кода (операция А6) и включение его в пакет передаваемых данных на ЦДП (операция А7). Этот признак в виде единицы записывают в нулевой разряд D-байта первого информационного блока пакета передаваемых на ЦДП данных, где этот пакет расшифровывают, выделяют признак охранного кода и ставят ТС под охрану (операция A8). Формат этого пакета представлен на фиг.5. После отправки пакета с признаком охранного кода контроллер ТС производит оценку наличия движения ТС (операция А9). При наличии движения и признака охранного кода контроллер формирует признак угона и производит его запись в пакет передаваемых на ЦДП данных (операция А10). Этот признак записывают в виде единицы в седьмой разряд D-байта первого информационного блока пакета (фиг.5). На ЦДП принятый пакет расшифровывают, выделяют признак угона и формируют обратное сообщение в виде пакета с включенными в него координатами охранной зоны (операция A11). Формат данного пакета представлен на фиг.6, где признак охранной зоны кодируют в первом байте в первом и втором разрядах (S1=0, S2=1). На ТС осуществляют прием этого пакета, расшифровывают и координаты охранной зоны записывают в энергонезависимую память 5 (операция А12). С помощью контроллера ТС производят отслеживание места нахождения ТС в охранной зоне и определяют момент его выхода из зоны (операция А13) с использованием алгоритма, приведенного на фиг.4. Сначала размещают в памяти контроллера контур охранной зоны в системе координат Х, Y (операция А131), строят линии контура зоны в этих координатах (операция А132), затем помещают координаты места нахождения ТС на плоскость внутри контура охранной зоны (операция А133), строят луч, исходящий из координат места нахождения ТС и параллельный направлению ОХ (операция А134), затем осуществляют расчет и построение точек пересечения луча с линиями контура охранной зоны (фиг.3), подсчитывают количество пересечений и по четному количеству пересечений судят о факте и моменте выхода ТС из охранной зоны (операции A135-A138, фиг.4). После этого с помощью бортового контроллера отключают зажигание и включают звуковую сигнализацию, выдерживают заданное время и вновь включают зажигание и отключают звуковую сигнализацию (операции А14-A16).
На ЦДП по данной информации принимают необходимые меры, после принятия которых (операции A17-A18) формируют команду о снятии признака угона и охранного кода ТС, записывают код этой команды в младшую половину Ds-байта, расположенного в любой фиксированной области данных пакета, формат которого приведен на фиг.7, и передают описанным образом на ТС (операция A19). В данном случае в младших разрядах этого байта (b0-b3) записывают код 0000. На ТС этот пакет информации принимают, расшифровывают, оценивают код в младшей половине байта Ds, при наличии которого исключают код признака угона и охранный код из памяти контроллера (операции А20-A21).
Запись охранного кода в память контроллера при выходе водителя из транспортного средства и формирование признака охранного кода с его записью в пакет информации, передаваемый на ЦДП, где после его расшифровки ставят под охрану соответствующее ТС, а при угоне по признаку угона формируют пакет с координатами контура охранной зоны и передают на ТС, где отслеживают момент выхода из охранной зоны и периодически выключают/включают зажигание со звуковой сигнализацией, позволяет периодически отключать/включать движение ТС на границе охранной зоны, что создает иллюзию неисправности, психологически действуя на угонщика и привлекая внимание окружающих, тем самым обеспечивается возможность быстрого отыскания угнанного ТС с минимальными материальными затратами. А автоматическое определение координат нахождения транспортного средства позволяет своевременно автоматически зафиксировать факт угона и координаты нахождения соответствующего транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2243594C2 |
| СПОСОБ УПРАВЛЕНИЯ И МОНИТОРИНГА ПОДВИЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2254616C1 |
| СПОСОБ ОПЕРАТИВНОГО СОПРОВОЖДЕНИЯ И УПРАВЛЕНИЯ НАЗЕМНЫМИ ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 2001 |
|
RU2217797C2 |
| БОРТОВОЙ КОМПЛЕКС ДЛЯ УПРАВЛЕНИЯ ПОДВИЖНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2004 |
|
RU2280899C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ НЕДОЗВОЛЕННОГО ИСПОЛЬЗОВАНИЯ ИЛИ КРАЖИ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2357880C1 |
| СПОСОБ ПЕРЕДАЧИ ДАННЫХ О МЕСТОПОЛОЖЕНИИ И СОСТОЯНИИ ТРАНСПОРТНЫХ СРЕДСТВ В СИСТЕМАХ МОНИТОРИНГА ТРАНСПОРТА | 2010 |
|
RU2431201C1 |
| СПОСОБ ЦЕНТРАЛИЗОВАННОГО КОНТРОЛЯ СОСТОЯНИЯ И МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2348551C1 |
| СПОСОБ РАДИОПОИСКА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2351489C1 |
| СПОСОБ МОНИТОРИНГА, СОПРОВОЖДЕНИЯ И УПРАВЛЕНИЯ НАЗЕМНЫМИ ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 2005 |
|
RU2288509C1 |
| СПОСОБ ПЕРЕДАЧИ ИЗВЕЩЕНИЙ ОБ УГОНЕ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2363600C1 |


Изобретение относится к области контроля и управления движением транспортных средств. Технический результат заключается в автоматическом определении факта угона транспортного средства (ТС) и координат его нахождения с минимальными материальными затратами. Способ заключается в том, что в момент выхода водителя из ТС в память контроллера ТС записывают охранный код и в пакет передаваемой на центральный диспетчерский пункт (ЦДП) информации к коду номера ТС из памяти контроллера добавляют признак охранного кода, который на ЦДП выделяют из пакета принимаемой информации и идентифицируют его как сигнал постановки транспортного средства под охрану, а при движении ТС без участия водителя и наличии признака охранного кода в пакет передаваемой информации дополнительно вводят код признака угона, который на ЦДП выделяют, идентифицируют его как тревожный сигнал, отображают на индикации, запоминают и формируют обратный пакет с включением в него координат контура охранной зоны, а на ТС отслеживают выход из охранной зоны и периодически отключают/включают движение ТС, на ЦДП после выполнения необходимых мер формируют код снятия признака угона и охранного кода, записывают его в пакет передаваемой на транспортное средство информации, где этот код расшифровывают и исключают код признака угона и охранный код из памяти контроллера ТС. 2 з.п. ф-лы, 7 ил.
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 1999 |
|
RU2157565C1 |
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 2001 |
|
RU2177647C1 |
| УНИВЕРСАЛЬНЫЙ ШПИНДЕЛЬ | 0 |
|
SU242099A1 |
| Устройство для тепловлажностной обработки воздуха | 1975 |
|
SU514996A1 |
| DE 19844458 A1, 06.04.2000. | |||

