Предлагаемое изобретение относится к области измерительной техники и может быть использовано в магнитной навигации для определения угловых положений автоматических подводных, надводных и летательных аппаратов, в нефтепромысловой геофизике для определения углового положения буровой скважины.
Известно устройство для определения углового положения подвижного объекта [1], состоящее из двухкомпонентного датчика, образованного двумя однокомпонентными магниточувствительными датчиками, оси которых перпендикулярны, немагнитной горизонтальной площадки, на которой расположены эти датчики так, что их оси параллельны площадке, карданова подвеса, на котором расположена упомянутая площадка, объекта в виде полого цилиндра, к корпусу которого закреплен карданов подвес с датчиками, маятника, жестко связанного с горизонтальной площадкой, катушкой индуктивности, жестко связанной с объектом и охватывающей датчики, двух усилительно-преобразовательных блоков, первые входы которых подключены к выходам соответствующих датчиков, двух фильтров нижних частот, входы которых подключены к выходам соответствующих усилительно-преобразовательных блоков через регистрирующие приборы, а выходы подключены к первым входам соответствующих датчиков, двух синхронных детекторов низкой частоты, входы которых подключены к выходам соответствующих усилительно-преобразовательных блоков, двух генераторов переменной ЭДС и генератора низкой частоты. При этом первый выход каждого из генераторов переменной ЭДС подключен к второму входу соответствующего усилительно-преобразовательного блока. Первый выход генератора низкой частоты подключен к вторым входам синхронных детекторов, а два других выхода подключены к выводам катушки индуктивности.
Известное устройство работает следующим образом. С помощью карданова подвеса площадка с двумя датчиками находится в горизонтальном положении. Стабилизация площадки в горизонтальном положении осуществляется с помощью маятника, поэтому оба датчика реагируют только на горизонтальную составляющую магнитного поля. Катушка индуктивности, охватывающая оба датчика, жестко связана с корпусом цилиндрического объекта. Ось катушки индуктивности перпендикулярна осям магниточувствительных датчиков, когда она, а значит, и ось цилиндрического объекта совпадают с вертикалью. В катушке индуктивности, подключенной к генератору низкой частоты, протекает низкочастотный ток, поэтому упомянутая катушка воспроизводит низкочастотное магнитное поле, на которое магниточувствительные датчики не реагируют, то есть переменное магнитное поле на них не действует, когда ось катушки совпадает с вертикалью. Если ось катушки индуктивности (ось цилиндрического объекта) отклонена от вертикали, то на датчики действует не только горизонтальная составляющая геомагнитного поля, но и переменное магнитное поле, воспроизводимое катушкой индуктивности. На вторые входы датчиков подаются с первых выходов соответствующих генераторов переменные ЭДС, возбуждающие эти датчики. В результате этого на выходе каждого из датчиков появляются ЭДС второй гармоники, каждая из которых пропорциональна горизонтальной составляющей геомагнитного поля и горизонтальной составляющей переменного магнитного поля, воспроизводимого катушкой индуктивности, когда ось цилиндрического объекта отклонена от вертикали. Выходные сигналы с датчиков усиливаются и детектируются в соответствующих усилительно-преобразовательных блоках, поэтому выходные сигналы с усилительно-преобразовательных блоков пропорциональны измеряемым компонентам магнитной индукции. Для детектирования сигналов на вторые входы каждого усилительно-преобразовательного блока подается переменное напряжение с вторых выходов соответствующих генераторов переменных ЭДС. При этом каждый усилительно-преобразовательный блок состоит из избирательного усилителя и синхронного детектора [1]. Выходной сигнал с выхода каждого усилительно-преобразовательного блока подается через регистрирующий прибор (микроамперметр) и фильтр нижних частот на первый вход соответствующего датчика, обеспечивая тем самым отрицательную обратную связь по измеряемой горизонтальной составляющей геомагнитного поля. Фильтры нижних частот препятствуют прохождению сигналов, пропорциональных переменному магнитному полю, воспроизводимому катушкой индуктивности, на первые входы соответствующих датчиков. Поэтому токи в цепях обратной связи пропорциональны горизонтальным составляющим геомагнитного поля. Сигналы с выходов усилительно-преобразовательных блоков подаются на первые входы соответствующих синхронных детекторов. На вторые входы этих детекторов подается переменное напряжение с генератора низкой частоты, поэтому сигналы на выходе каждого синхронного детектора пропорциональны амплитуде горизонтальной составляющей переменного магнитного поля. По измеренным составляющим переменного и постоянного магнитного поля определяют азимутальный и зенитный углы цилиндрического объекта.
В известном техническом решении отсутствует привязка осей двухкомпонентного магниточувствительного датчика, катушки индуктивности и цилиндрического объекта к вертикали, что приводит к погрешности определения азимутального и зенитного углов упомянутого объекта. Кроме того, известное техническое решение не обеспечивает определение визирного угла, а значит, информация об угловом положении цилиндрического объекта будет неполной.
Известно устройство для определения углового положения подвижного объекта (корпуса инклинометра) [2], которое по совокупности существенных признаков наиболее близко предлагаемому и принято за прототип. Известное устройство [2] состоит из корпуса инклинометра, продольная ось которого совпадает с направлением буровой скважины, трехкомпонентного магнитометра, у которого оси магниточувствительного датчика взаимно ортогональны, и трехкомпонентного акселерометра, оси чувствительности которого коллинеарны осям системы координат ОХУZ корпуса инклинометра с началом координат в точке О, при этом одна из осей ОХ совпадает с продольной осью корпуса инклинометра, а значит, и с направлением скважины, вторая ось СУ перпендикулярна оси ОХ и параллельна горизонтальной плоскости при углах крена и тангажа корпуса инклинометра, равных нулю, и третья ось OZ перпендикулярна осям ОХ и ОУ, то есть оси системы координат ОХУZ являются осями строительной системы координат корпуса инклинометра.
Известное устройство [2] работает следующим образом. По сигналам с трехкомпонентного магнитометра, пропорциональным проекциям вектора индукции геомагнитного поля на оси магниточувствительного датчика магнитометра, и сигналам с трехкомпонентного акселерометра, пропорциональным проекциям вектора ускорения силы тяжести на оси чувствительности упомянутого акселерометра, определяют расчетным путем азимутальный, визирный и зенитный углы корпуса инклинометра, а значит, определяют и угловое положение буровой скважины, в которой находится корпус инклинометра.
В известном техническом решении [2] магниточувствительный датчик и трехкомпонентный акселерометр размещают так, чтобы их оси были коллинеарны. Однако оси магниточувствительного датчика и оси чувствительности акселерометра могут быть неколлинеарны [3, 4], что приводит к погрешности определения углового положения корпуса инклинометра. Неравномерность движения корпуса инклинометра и случайные отклонения при движении корпуса инклинометра от выбранного направления приводят к появлению на выходах трехкомпонентного акселерометра сигналов, пропорциональных дополнительным ускорениям, обусловленных изменением скорости корпуса инклинометра, например, при его рыскании, что является одной из существенных причин возникновения погрешности определения углового положения корпуса инклинометра (объекта), а значит, и буровой скважины.
Задачей предлагаемого изобретения является разработка устройства, обеспечивающего уменьшение погрешности определения углового положения подвижного объекта от погрешностей коллинеарности осей магниточувствительного датчика магнитометра и осей чувствительности акселерометра строительным осям подвижного объекта и от изменения скорости упомянутого объекта, в частности, обусловленной случайными отклонениями подвижного объекта от выбранного направления движения. Поставленная задача решается за счет использования на подвижном объекте трехкомпонентного магнитометра, как одного, так и двух трехкомпонентных акселерометров, инерциального устройства, катушки индуктивности, размещенной на инерциальном устройстве, и привязки осей магниточувствительного датчика магнитометра и осей чувствительности акселерометров к осям строительной системы координат подвижного объекта.
Предлагаемое изобретение представляет собой два устройства для определения углового положения подвижного объекта, связанных настолько между собой, что они образуют единый общий изобретательский замысел.
Предлагаемое устройство для определения углового положения подвижного объекта (по первому варианту), включающее трехкомпонентный магнитометр, у которого оси магниточувствительного датчика взаимно ортогональны, и трехкомпонентный акселерометр, оси чувствительности которого коллинеарны строительным осям системы координат ОХУZ подвижного объекта с началом координат в точке О, снабжено регулировочным устройством, на котором размещен магниточувствительный датчик магнитометра, немагнитным основанием, на котором размещены трехкомпонентный акселерометр и регулировочное устройство, выполненное с возможностью изменения углов крена и тангажа магниточувствительного датчика относительно немагнитного основания, поворотным устройством, на котором установлено немагнитное основание, вторым трехкомпонентным акселерометром, вторым поворотным устройством, на котором размещен второй трехкомпонентный акселерометр, регистрирующим блоком, входы которого подключены к выходам магнитометра и двух трехкомпонентных акселерометров, и вычислительным устройством, подключенным к регистрирующему блоку, выполненному с возможностью одновременной регистрации сигналов с выходов магнитометра и двух трехкомпонентных акселерометров, при этом первый и второй трехкомпонентные акселерометры размещены на одной из осей упомянутой системы координат ОХУZ симметрично относительно начала координат точки О, выбранной в месте центра тяжести подвижного объекта.
Предлагаемое устройство для определения углового положения подвижного объекта (по второму варианту), включающее трехкомпонентный магнитометр, у которого оси магниточувствительного датчика взаимно ортогональны, и трехкомпонентный акселерометр, оси чувствительности которого коллинеарны строительным осям системы координат ОХУZ подвижного объекта с началом координат в точке О, снабжено регулировочным устройством, на котором размещен магниточувствительный датчик магнитометра, немагнитным основанием, на котором размещены трехкомпонентный акселерометр и регулировочное устройство, выполненное с возможностью изменения углов крена и тангажа магниточувствительного датчика относительно немагнитного основания, поворотным устройством, на котором установлено немагнитное основание, регистрирующим блоком, входы которого подключены к выходам магнитометра и трехкомпонентного акселерометра, вычислительным устройством, подключенным к регистрирующему блоку, инерциальным устройством и катушкой индуктивности, размещенной на инерциальном устройстве так, что ось катушки ориентирована по вертикали, при этом катушка индуктивности подключена к магнитометру. Кроме того, выход вычислительного устройства может быть подключен к инерциальному устройству.
Применение в предлагаемом устройстве для определения углового положения подвижного объекта по первому варианту трехкомпонентного магнитометра, у которого оси магниточувствительного датчика взаимно ортогональны, и трехкомпонентного акселерометра, оси чувствительности которого коллинеарны строительным осям системы координат ОХУZ подвижного объекта, в совокупности с вторым трехкомпонентным акселерометром, немагнитным основанием, регулировочным устройством, выполненным с возможностью изменения углов крена и тангажа магниточувствительного датчика магнитометра относительно немагнитного основания, двух поворотных устройств, регистрирующего блока, выполненного с возможностью одновременной регистрации сигналов с выходов магнитометра и двух трехкомпонентных акселерометров, и вычислительным устройством, размещенных на подвижном объекте и включенных между собой соответствующим образом, обеспечивает привязку осей магниточувствительного датчика, осей чувствительности трехкомпонентных акселерометров к строительным осям подвижного объекта и снижение влияния изменения скорости объекта при случайных отклонениях объекта от выбранного направления движения на погрешность определения углов крена и тангажа, что уменьшает погрешность определения углового положения подвижного объекта от неколлинеарности осей магниточувствительного датчика и осей чувствительности акселерометров осям строительной системы координат объекта и от изменения упомянутой скорости объекта.
Применение в предлагаемом устройстве для определения углового положения подвижного объекта по второму варианту трехкомпонентного магнитометра, у которого оси магниточувствительного датчика взаимно ортогональны, и трехкомпонентного акселерометра, оси чувствительности которого коллинеарны строительным осям системы координат ОХУZ подвижного объекта, в совокупности с регистрирующим блоком, вычислительным устройством, немагнитным основанием, регулировочным устройством, выполненным с возможностью изменения углов крена и тангажа магниточувствительного датчика относительно немагнитного основания, поворотным устройством, инерциальным устройством и катушкой индуктивности, размещенных и включенных между собой соответствующим образом, обеспечивает привязку осей магниточувствительного датчика, осей чувствительности трехкомпонентного акселерометра к строительным осям подвижного объекта и существенное снижение влияния изменения скорости подвижного объекта, обусловленной как рысканием объекта, так и неравномерностью движения по выбранному направлению, на определение углов крена и тангажа, что уменьшает погрешность определения углового положения подвижного объекта от неколлинеарности осей магниточувствительного датчика, осей чувствительности акселерометра осям строительной системы координат объекта и от изменения линейной скорости по выбранному направлению и от рыскания упомянутого подвижного объекта.
Таким образом, технический результат предлагаемого устройства выражается в привязке осей магниточувствительного датчика, осей чувствительности трехкомпонентных акселерометров к строительным осям подвижного объекта и существенном снижении влияния изменения скорости подвижного объекта на определение углов крена и тангажа, что уменьшает погрешность определения углового положения подвижного объекта от неколлинеарности осей магниточувствительного датчика, осей чувствительности трехкомпонентных акселерометров строительным осям системы координат подвижного объекта и от изменения скорости упомянутого объекта.
Сущность предлагаемого технического решения поясняется следующими графическими материалами.
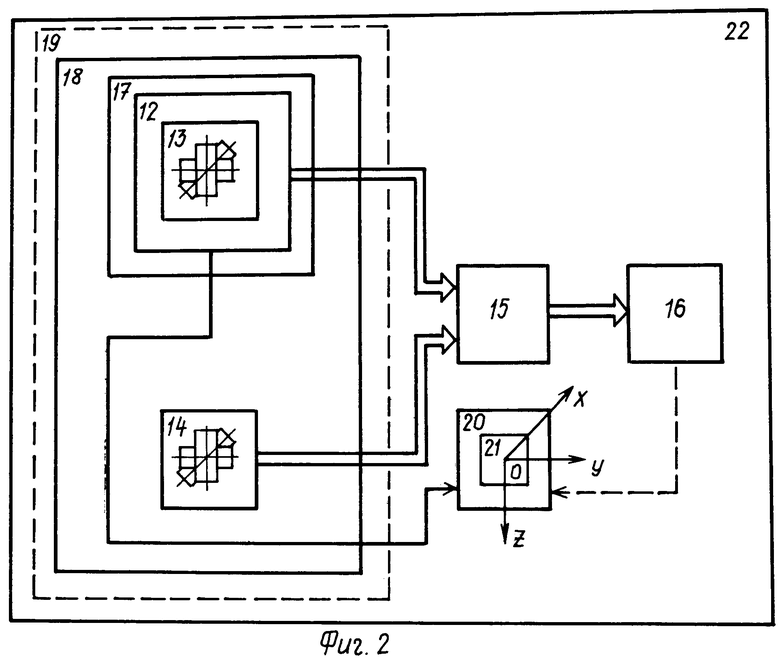
На фиг.1 изображена структурная схема устройства для определения углового положения подвижного объекта по первому варианту.
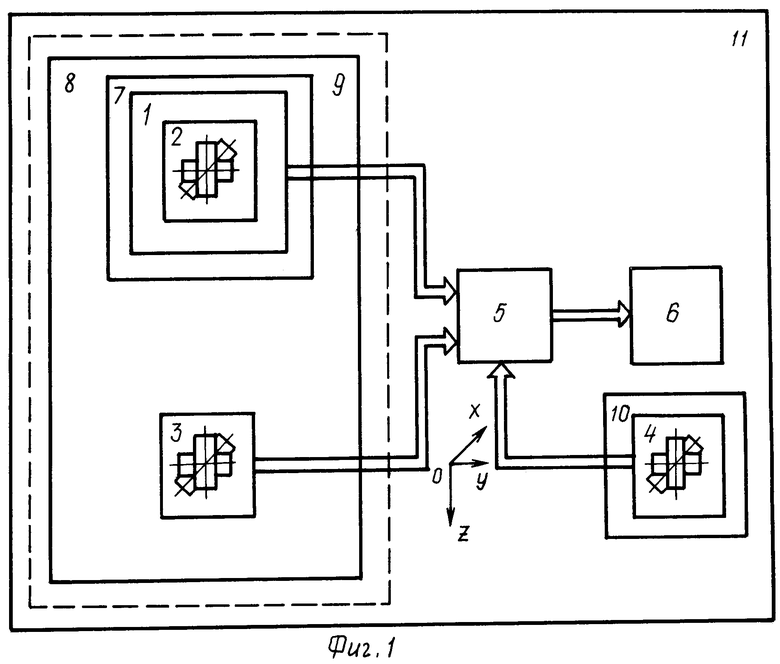
На фиг.2 изображена структурная схема устройства для определения углового положения подвижного объекта по второму варианту.
Предлагаемое устройство для определения углового положения подвижного объекта по первому варианту состоит (фиг.1) из трехкомпонентного магнитометра 1, включающего магниточувствительный датчик 2, трехкомпонентных акселерометров 3 и 4, регистрирующего блока 5, входы которого подключены к выходам магнитометра 1 и акселерометров 3 и 4, вычислительного устройства 6, подключенного к блоку 5, регулировочного устройства 7, немагнитного основания 8, поворотных устройств 9 и 10 и подвижного объекта 11. На основании 8 размещены акселерометр 3 и устройство 7, выполненное с возможностью изменения углов крена и тангажа датчика 2 относительно основания 8. Основание 8 размещено на поворотном устройстве 9, а акселерометр 4 размещен на поворотном устройстве 10.
Предлагаемое устройство для определения углового положения подвижного объекта по второму варианту состоит (фиг.2) из трехкомпонентного магнитометра 12, включающего магниточувствительный датчик 13, трехкомпонентного акселерометра 14, регистрирующего блока 15, входы которого подключены к выходам магнитометра 12 и трехкомпонентного акселерометра 14, вычислительного устройства 16, подключенного к блоку 15, регулировочного устройства. 17, немагнитного основания 18, поворотного устройства 19, инерциального устройства 20, катушки индуктивности 21 и подвижного объекта 22. На основании 18 размещены акселерометр 14 и устройство 17, выполненное с возможностью изменения углов крена и тангажа датчика 13 относительно основания 18. Основание 18 размещено на поворотном устройстве 19. Катушка индуктивности 21 подключена к магнитометру 12. Катушка 21 размещена на инерциальном устройстве 20 так, что ось катушки 21 ориентирована по вертикали. При этом оси чувствительности акселерометра 14 коллинеарны строительным осям системы координат ОХУZ подвижного объекта 22. Устройство 16 может быть подключено к устройству 20.
Предлагаемое устройство для определения углового положения подвижного объекта по первому варианту работает следующим образом. Конструирование и изготовление датчика 2 (фиг.1), в частности, феррозондового датчика, и акселерометров 3 и 4 не обеспечивают ортогональность осей датчика 2 и осей чувствительности акселерометров 3 и 4 [3, 4]. Поэтому предварительно до размещения на подвижном объекте 11 основания 8 с датчиком 2 и акселерометрами 3, 4 приводят оси датчика 2 и оси акселерометров 3 и 4 к ортогональным базисам [3, 5]. С помощью регулировочного устройства 7 осуществляют привязку ортогонального базиса датчика 2 к ортогональному базису осей чувствительности акселерометра 3 [5]. Затем основание 8 размещают на поворотном устройстве 9, а акселерометр 4 - на поворотном устройстве 10 подвижного объекта 11. Устройства 9 и 10 должны обеспечивать соответственно изменения курса основания 8 и акселерометpa 4. С помощью поворотного устройства 9 и акселерометра 3 осуществляют привязку ортогонального базиса датчика 2 и ортогонального базиса акселерометра 4 к строительном осям объекта [5], обеспечивая тем самым приведение измеряемых проекций вектора магнитной индукции датчиком 2 на оси, коллинеарные строительным осям системы координат подвижного объекта 11. Привязка же осей акселерометров 3 и 4 к навигационной системе объекта 11, а значит, и к строительным осям объекта 11 может быть осуществлена с помощью соответствующих поворотных устройств 9 и 10, как и в [5].
Магнитометр 1 (фиг.1) измеряет проекции магнитной индукции на оси датчика 2 [3]. Сигналы с магнитометра 1, пропорциональные проекциям индукции геомагнитного поля и магнитной индукции, обусловленной индуктивной и постоянной намагниченностью объекта 11, подаются на блок 5. Блок 5 обеспечивает возможность одновременной регистрации сигналов с выходов магнитометра 1 и акселерометров 3, 4 для дискретных моментов времени. Уравнения для измеренных проекций векторов магнитной индукции Вxi, Вyi, Bzi магнитометром 1 можно представить в следующем виде [6]:



где a, b, с, d, e, f, q, h, k - параметры Пуассона, характеризующие индуктивную намагниченность объекта 11 в месте размещения датчика 2;



(l1i, m1i, n1i), (l2i, m2i, n2i), (l3i, m3i, n3i) - направляющие косинусы осей системы координат ОХУZ в опорной геомагнитной системе координат, являющиеся функциями углов магнитного курса ϕi, крена θi, тангажа Ψi; i=1, 2, 3,... - моменты времени одновременных регистрации сигналов с выходов магнитометра 1 и акселерометров 3 и 4; Вхтi, Вутi, Вzтi - проекции вектора индукции геомагнитного поля для i-го момента времени на оси геомагнитной системы координат; Вхтi - проекция на горизонтальную ось геомагнитной системы координат, касательной к магнитному меридиану и направленную в сторону севера; Вутi - проекция вектора магнитной индукции на горизонтальную ось геомагнитной системы координат, перпендикулярную плоскости магнитного меридиана и направленную в сторону востока, при этом Вутi=0; Вzтi - проекция вектора магнитной индукции на вертикальную ось геомагнитной системы координат, направленную по вертикали вниз; Вхр, Вур, Вzp - проекции вектора магнитной индукции от постоянной намагниченности объекта 11 в месте размещения датчика 2.
В системе уравнений (1)-(3) неизвестными параметрами являются F1i, F2i, F3i. Параметры Пуассона и Вxp, Вyp, Вzp - известны. Эти параметры определяют предварительно, например, из [7].
Размещение трехкомпонентных акселерометров 3 и 4 (фиг.1), например, на оси ОУ симметрично относительно начала координат точки О, выбранной в месте центра тяжести подвижного объекта 11, обеспечивает исключение погрешности определения направляющих косинусов n1i, n2i, n3i - строительной оси OZ объекта 11 от изменения скорости объекта 11, обусловленной случайными отклонениями (рысканием) объекта 11 от выбранного направления движения. В частности, причиной изменения скорости объекта 11 являются центростремительные и тангенциальные ускорения объекта 11 при его рыскании. При выбранном размещении акселерометров 3 и 4 и неравномерной скорости из-за рыскания объекта 11 направляющие косинусы n1i, n2i, n3i можно определить из следующих выражений:



где ax1i, ay1i, az1i и ax1i, ay2i, az2i - проекции вектора ускорения объекта 11 на оси системы координат ОХУZ, измеренные соответственно акселерометрами 3 и 4; g - ускорение силы тяжести в районе измерений.
По полученным n1i, n2i, n3i определяют углы крена θi и тангажа Ψi объекта 11. Из системы уравнений (1)-(3) по измеренным Вxi, Вyi, Вzi, известным параметрам Пуассона и Вxp, Вyp, Вzp - определяют F1i, F2i, F3i. Подставив в уравнения для F1i, F2i, F3i полученные значения углов крена и тангажа, определяют Вxтi, Вzтi и магнитный курс ϕI - объекта 11.
Таким образом, в предлагаемом техническом решении по первому варианту за счет привязки осей датчика магнитометра и осей чувствительности акселерометров к строительным осям подвижного объекта, обеспечивающей приведение измеренных проекций магнитной индукции и проекций ускорения объекта к осям строительной системы координат ОXУZ, существенно уменьшена по сравнению с аналогом и прототипом погрешность определения углового положения подвижного объекта от неколлинеарности осей магниточувствительного датчика и осей чувствительности акселерометров осям подвижного объекта. Кроме того, в предлагаемом техническом решении по сравнению с прототипом благодаря упомянутому размещению трехкомпонентных акселерометров на объекте исключена погрешность определения углового положения объекта от изменения его скорости, обусловленной рысканием подвижного объекта.
Предлагаемое устройство для определения углового положения подвижного объекта по второму варианту работает следующим образом. Конструирование и изготовление датчика 13 (фиг.2), в частности, феррозондового датчика и трехкомпонентного акселерометра 14 не обеспечивают ортогональность осей датчика 13 и осей чувствительности акселерометра 14. Поэтому предварительно до размещения на подвижном объекте 22 основания 18 с датчиком 13 и акселерометром 14 приводят оси датчика 13 и оси акселерометра 14 к ортогональным базисам [3, 5]. С помощью регулировочного устройства 17 осуществляют привязку ортогонального базиса датчика 13 к ортогональному базису осей чувствительности акселерометра 14 [5]. Затем основание 18 размещают на поворотном устройстве 19. Устройство 19 должно обеспечивать изменение курса основания 18, а следовательно, и датчика 13. С помощью поворотного устройства 19 и акселерометра 14 осуществляют привязку ортогонального базиса датчика 13 к строительным осям объекта 5, обеспечивая тем самым приведение измеряемых проекций магнитной индукции и ускорения на оси коллинеарные строительным осям объекта 22.
В катушке 21, подключенной к магнитометру 12, протекает переменный ток. Следовательно, катушка 21, ось которой ориентирована инерциальным устройством 20 по вертикали, воспроизводит переменное магнитное поле. Магнитометр 12 измеряет проекции индукции на оси датчика 13, пропорциональные индукции геомагнитного поля, магнитной индукции от намагниченности объекта 22 и магнитной индукции, воспроизводимой катушкой 21. При этом магнитометр 12, как и магнитометр в работе [1], выделяет сигналы, пропорциональные проекциям вектора магнитной индукции, воспроизводимой катушкой 21, и сигналы пропорциональные проекциям вектора индукции геомагнитного поля и магнитного поля намагниченного объекта 22. Проекции вектора магнитной индукции Вxкi, Вyкi, Вzкi, созданные катушкой 21 с известным дипольным магнитным моментом М, ориентированным по вертикали с помощью инерциального устройства 20, можно представить в следующем виде:



где μ0=4π-10-7 Гн/м - магнитная постоянная; n1i, n2i, n3i - направляющие косинусы оси OZ в геомагнитной системе координат, которые являются функциями углов крена θi и тангажа Ψi объекта; i=1, 2, 3,... - моменты времени регистрации сигналов с выходов магнитометра 12; x, у, z - координаты датчика 13 в системе координат объекта 22 с началом координат в точке О, например, совпадающей с геометрическим центром катушки 21;  . В системе координат подвижного объекта 22 координаты x, у, z имеют постоянные значения.
. В системе координат подвижного объекта 22 координаты x, у, z имеют постоянные значения.
Проекции вектора магнитной индукции, обусловленные индукцией геомагнитного поля и магнитного поля намагниченного объекта 22, которые обозначим через Вxi, Вyi, Вzi можно представить в виде уравнений (1)-(3). Из системы уравнений (4)-(6) по измеренным Bхкi, Bукi Bzкi, известным x, у, z и М определяют ni1, n2i, n3i, по которым находят углы крена и тангажа объекта 22. Подставляют значения углов крена и тангажа в уравнения (1)-(3), а затем, по измеренным Bxi, Вyi, Вzi, известным параметрам Пуассона и Вxp, Вyp, Вzp определяют Вхтi, Вzтi и магнитный курс объекта 22. Углы магнитного курса, крена и тангажа определяют угловое положение объекта 22. В случае, если инерциальным устройством 20 является, например, инерциальная гировертикаль, то сигналы с выхода устройства 16, пропорциональные магнитному курсу объекта, поступают на устройство 20 для ориентации одной из горизонтальных осей гировертикали по магнитному меридиану [8]. Таким образом, в предлагаемом техническом решении по второму варианту за счет привязки осей датчика магнитометра к строительным осям подвижного объекта, обеспечивающей приведение измеренных проекции магнитной индукции к строительной системе координат объекта, существенно уменьшена по сравнению с аналогом и прототипом погрешность определения углового положения подвижного объекта от неколлинеарности осей магниточувствительного датчика магнитометра строительным осям подвижного объекта. Кроме того, в предлагаемом техническом решении по сравнению с прототипом благодаря использованию инерциального устройства значительно уменьшена погрешность определения углового положения подвижного объекта от изменения скорости объекта, связанной с рысканием и неравномерностью движения (линейным ускорением [8]) упомянутого объекта. Следует отметить, что определение углов курса, крена, тангажа и применение трехкомпонентного акселерометра в техническом решении по второму варианту обеспечивает возможность определения скорости и координат упомянутого подвижного объекта.
В предлагаемом техническом решении магнитометры 1 и 12 (фиг.1, фиг.2), включающие соответствующие магниточувствительные датчики 2 и 13, могут быть выполнены, как и в устройстве для измерения параметров магнитного поля [1]. В качестве регистрирующих блоков 5, 15 и вычислительных устройств 6, 16 можно использовать преобразователь измерительный многоканальный ПИМ-1 (сертификат №15660, Госстандарт России). Трехкомпонентные акселерометры 3, 4, 14 могут быть выполнены на базе двухкомпонентных акселерометров типа ADXL202E. Инерциальным устройством 20 (фиг.2) может быть гировертикаль или инерциальная гировертикаль, у которой при установке в начальный момент времени оси гироскопа по вертикали места, в дальнейшем, при любых ускорениях объекта, она будет следовать за вертикалью места [8]. Регулировочные устройства 7 и 17 (фиг.1, фиг.2) могут быть выполнены аналогично, как у теодолита, например, Т2, в виде треножника и трех подъемных винтов, а каждое поворотное устройство 9, 10, 19 может быть выполнено аналогично установке для поверки инклинометров УПИ-2 [2]. Катушка индуктивности 21 (фиг.2) для воспроизведения магнитного поля может быть выполнена, как и в [9].
Следует заметить, что каждое из двух предложенных устройств обеспечивает определение углового положения как немагнитного, так и ферромагнитного подвижного объекта.
Литература
1. Афанасьев Ю.В. Феррозонды. Л.: Энергия. 1969. 168 с.
2. Алимбеков Р.И., Баймуратов Ю.Г., Зайко А.И., Сорокин А.А. Установка для поверки инклинометров // Измерительная техника. 2002. №11. С.23.
3. Афанасьев Ю.В. Феррозондовые приборы. Л.: Энергоатомиздат. 1986. 188 с.
4. Миловзоров Г.В. Моделирование и исследование инструментальных погрешностей трехкомпонентного акселерометрического датчика наклона // Измерительная техника. 1996. №10. С.22-26.
5. Смирнов Б.М. Привязка осей трехкомпонентного магнитометрического датчика к осям навигационной системы ферромагнитного подвижного объекта // Измерительная техника. 2004. №7. С.27-31.
6. Кожухов В.П., Воронов В.В., Григорьев В.В. Магнитные компасы. М.: Транспорт. 1981. 216 с.
7. Смирнов Б.М. Определение индукции геомагнитного поля на фоне магнитных помех подвижного объекта // Измерительная техника. 2003. №11. С.52-58.
8. Одинова И.В., Блюмин Г.Д., Карпухин А.В. и др. Теория и конструкция гироскопических приборов и систем. М.: Высшая школа. 1971. 508 с.
9. Чернышев Е.Т., Чечурина Е.Н., Чернышева Н.Г., Студенцов Н.В. Магнитные измерения. М.: Изд-во Комитета Стандартов, мер и измерительных приборов при Совете Министров СССР. 1969. 248 с.
Изобретение относится к области измерительной техники и может быть использовано в магнитной навигации для определения угловых положений автоматических подводных, надводных и летательных аппаратов, в нефтепромысловой геофизике для определения углового положения буровой скважины. Заявлено устройство для определения углового положения подвижного объекта, состоящее из трехкомпонентного магнитометра, включающего магниточувствительный датчик, двух трехкомпонентных акселерометров, регистрирующего блока, вычислительного устройства, регулировочного устройства, немагнитного основания и двух поворотных устройств. Технический результат - повышение точности определения углового положения объекта. 2 н. и 1 з.п. ф-лы, 2 ил.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТЫ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 1991 |
|
RU1829578C |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2098764C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ И УГЛОВОГО ПОЛОЖЕНИЯ ОБЪЕКТА (ВАРИАНТЫ) | 2000 |
|
RU2166735C1 |
| US 4539760 А, 10.09.1985. | |||

