Предлагаемое изобретение относится к области измерительной техники и может быть использовано в магнитной навигации для определения угловых положений автоматических подводных, надводных и летательных аппаратов, в нефтепромысловой геофизике для определения углового положения буровой скважины [1-3].
Известно устройство для определения углового положения подвижного объекта [1], состоящее из двухкомпонентного датчика, образованного двумя однокомпонентными магниточувствительными датчиками, оси которых перпендикулярны, немагнитной горизонтальной площадки, на которой расположены эти датчики так, что их оси параллельны площадке, карданова подвеса, на котором расположена упомянутая площадка, объекта в виде полого цилиндра, к корпусу которого закреплен карданов подвес с датчиками, маятника, жестко связанного с горизонтальной площадкой, катушкой индуктивности, жестко связанной с объектом и охватывающей датчики, двух усилительно-преобразовательных блоков, первые входы которых подключены к выходам соответствующих датчиков, двух фильтров нижних частот, входы которых подключены к выходам соответствующих усилительно-преобразовательных блоков через регистрирующие приборы, а выходы подключены к первым входам соответствующих датчиков, двух синхронных детекторов низкой частоты, входы которых подключены к выходам соответствующих усилительно-преобразовательных блоков, двух генераторов переменной ЭДС и генератора низкой частоты. При этом первый выход каждого из генераторов переменной ЭДС подключен к второму входу соответствующего усилительно-преобразовательного блока. Первый выход генератора низкой частоты подключен к вторым входам синхронных детекторов, а два других выхода подключены к выводам катушки индуктивности.
Известное устройство работает следующим образом. С помощью карданова подвеса площадка с двумя датчиками находится в горизонтальном положении. Стабилизация площадки в горизонтальном положении осуществляется с помощью маятника, поэтому оба датчика реагируют только на горизонтальную составляющую магнитного поля. Катушка индуктивности, охватывающая оба датчика, жестко связана с корпусом цилиндрического объекта. Ось катушки индуктивности перпендикулярна осям магниточувствительных датчиков, когда она, а значит, и ось цилиндрического объекта совпадают с вертикалью. В катушке индуктивности, подключенной к генератору низкой частоты, протекает низкочастотный ток, поэтому упомянутая катушка воспроизводит низкочастотное магнитное поде, на которое магниточувствительные датчики не реагируют, то есть переменное магнитное поле на них не действует, когда ось катушки совпадает с вертикалью. Если ось катушки индуктивности (ось цилиндрического объекта) отклонена от вертикали, то на датчики действует не только горизонтальная составляющая геомагнитного поля, но и переменное магнитное поле, воспроизводимое катушкой индуктивности. На вторые входы датчиков подаются с первых выходов соответствующих генераторов переменные ЭДС, возбуждающие эти датчики. В результате этого на выходе каждого из датчиков появляются ЭДС второй гармоники, каждая из которых пропорциональна горизонтальной составляющей геомагнитного поля и горизонтальной составляющей переменного магнитного поля, воспроизводимого катушкой индуктивности, когда ось цилиндрического объекта отклонена от вертикали. Выходные сигналы с датчиков усиливаются и детектируются в соответствующих усилительно-преобразовательных блоках, поэтому выходные сигналы с усилительно-преобразовательных блоков пропорциональны измеряемым компонентам магнитной индукции. Для детектирования сигналов на вторые входы каждого усилительно-преобразовательного блока подается переменное напряжение с вторых выходов соответствующих генераторов переменной ЭДС. При этом каждый усилительно-преобразовательный блок состоит из избирательного усилителя и синхронного детектора [1]. Выходной сигнал с выхода каждого усилительно-преобразовательного блока подается через регистрирующий прибор (микроамперметр) и фильтр нижних частот на первый вход соответствующего датчика, обеспечивая тем самым отрицательную обратную связь по измеряемой горизонтальной составляющей геомагнитного поля. Фильтры нижних частот препятствуют прохождению сигналов, пропорциональных переменному магнитному полю, воспроизводимому катушкой индуктивности, на первые входы соответствующих датчиков. Поэтому токи в цепях обратной связи пропорциональны горизонтальным составляющим геомагнитного поля. Сигналы с выходов усилительно-преобразовательных блоков подаются на первые входы соответствующих синхронных детекторов. На вторые входы этих детекторов подается переменное напряжение с генератора низкой частоты, поэтому сигналы на выходе каждого синхронного детектора пропорциональны амплитуде горизонтальной составляющей переменного магнитного поля. По измеренным составляющим переменного и постоянного магнитного поля определяют азимутальный и зенитный углы цилиндрического объекта.
Известное техническое решение не обеспечивает определение визирного угла, а значит, информация об угловом положении цилиндрического объекта будет неполной. Кроме того, в известном техническом решении определяемые азимутальный и зенитный углы существенно зависят от переносных ускорений, обусловленных неравномерностью скорости поступательного движения и изменением направления движения объекта.
Известно устройство для определения углового положения подвижного объекта (корпуса инклинометра) [3], которое по совокупности существенных признаков наиболее близко предлагаемому и принято за прототип. Известное устройство [3] состоит из корпуса инклинометра, продольная ось которого совпадает с направлением буровой скважины, трехкомпонентного магнитометра, у которого оси магниточувствительного датчика взаимно ортогональны, и трехкомпонентного акселерометра, оси чувствительности которого коллинеарны осям строительной системы координат OXYZ корпуса инклинометра с началом координат в точке О, при этом одна из осей ОХ совпадает с продольной осью корпуса инклинометра, а значит, и с направлением скважины, вторая ось OY перпендикулярна оси ОХ и параллельна горизонтальной плоскости при углах крена и тангажа корпуса инклинометра, равных нулю, и третья ось QZ перпендикулярна осям ОХ и OY.
Известное устройство [3] работает следующим образом. По сигналам с трехкомпонентного магнитометра, пропорциональным проекциям вектора индукции геомагнитного поля, и сигналам с трехкомпонентного акселерометра, пропорциональным проекциям вектора ускорения силы тяжести на оси чувствительности упомянутого акселерометра, определяют расчетным путем азимутальный, визирный и зенитный углы корпуса инклинометра, а значит, определяют угловое положение буровой скважины, в которой находится корпус инклинометра.
Неравномерность движения корпуса инклинометра и случайные отклонения при движении корпуса инклинометра от выбранного направления (рыскания инклинометра) приводят к появлению на выходах трехкомпонентного акселерометра сигналов, пропорциональных не только проекциям вектора ускорения силы тяжести, но и проекциям переносных ускорений, обусловленных неравномерностью скорости поступательного движения и изменением направления движения объекта, в частности случайными отклонениями объекта от выбранного направления движения (рыскания объекта), что является одной из существенных причин возникновения погрешности определения углового положения корпуса инклинометра (объекта), а значит, и буровой скважины.
Задачей предлагаемого изобретения является разработка устройства, исключающего влияние переносных ускорений объекта, обусловленных неравномерностью скорости поступательного движения и изменением направления движения объекта, на погрешность определения углового положения подвижного объекта. Поставленная задача решается за счет применения на подвижном объекте трехкомпонентного магнитометра и четырех трехкомпонентных акселерометров, реагирующих на соответствующие ускорения и размещенных на объекте определенным образом.
Предлагаемое устройство для определения углового положения подвижного объекта, включающее трехкомпонентный магнитометр и трехкомпонентный акселерометр, у которого оси чувствительности коллинеарны строительным осям системы координат OXYZ подвижного объекта с началом координат в точке О и осям магниточувствительного датчика трехкомпонентного магнитометра, снабжено вторым, третьим и четвертым трехкомпонентными акселерометрами, регистрирующим блоком и вычислительным устройством, подключенным к регистрирующему блоку, входы которого подключены к выходам трехкомпонентного магнитометра, первого, второго, третьего и четвертого трехкомпонентных акселерометров, при этом первый и второй трехкомпонентные акселерометры размещены на одной оси, проходящей через начало координат точку О, но по разные стороны от начало координат, третий и четвертый трехкомпонентные акселерометры размещены на одной оси, проходящей через начало координат - точку О, но по разные стороны от начало координат, оси чувствительности второго, третьего и четвертого трехкомпонентных акселерометров коллинеарны строительным осям системы координат OXYZ, у которой начало координат точка О выбрана в месте центра тяжести подвижного объекта.
Применение в предлагаемом устройстве для определения углового положения подвижного объекта трехкомпонентного магнитометра и трехкомпонентного акселерометра, у которого оси чувствительности коллинеарны строительным осям системы координат подвижного объекта и осям магниточувствительного датчика магнитометра, в совокупности с регистрирующим блоком, вычислительным устройством, вторым, третьим и четвертым трехкомпонентными акселерометрами, размещенными на подвижном объекте и включенными между собой соответствующим образом, обеспечивает исключение влияния переносных ускорений объекта, обусловленных неравномерностью скорости поступательного движения и изменением направления движения объекта, на погрешность определения углового положения подвижного объекта, что повышает точность определения углового положения объекта.
Таким образом, технический результат предлагаемого изобретения выражается в исключении влияния переносных ускорений, обусловленных неравномерностью скорости поступательного движения и изменением направления движения объекта, в частности от рыскания объекта, на погрешность определения углов крена и тангажа объекта, что повышает точность измерения углов курса, крена, тангажа упомянутого объекта, а следовательно, и точность определения его углового положения.
Сущность предлагаемого технического решения поясняется следующими графическими материалами.
На чертеже изображена структурная схема устройства для определения углового положения подвижного объекта.
Предлагаемое устройство для определения углового положения подвижного объекта состоит из трехкомпонентного магнитометра 1, включающего магниточувствительный датчик 2, трехкомпонентных акселерометров 3-6, регистрирующего блока 7, входы которого подключены к выходам магнитометра 1 и акселерометров 3-6, вычислительного устройства 8, подключенного к блоку 7, и подвижного объекта 9. Акселерометры 3 и 4 размещены, например, на оси ОУ симметрично относительно начала строительной системы координат OXYZ точки О, выбранной в месте центра тяжести объекта 9, а акселерометры 5 и 6 размещены, например, на оси OZ симметрично относительно центра тяжести объекта 9. Оси датчика 2 и оси чувствительности акселерометров 3-6 коллинеарны соответствующим осям строительной системы координат OXYZ.
Предлагаемое устройство для определения углового положения подвижного объекта работает следующим образом. Магнитометр 1 измеряет проекции вектора магнитной индукции на оси датчика 2 [1]. Сигналы с магнитометра 1, пропорциональные проекциям вектора индукции геомагнитного поля и вектора магнитной индукции, обусловленной индуктивной и постоянной (остаточной) намагниченностью объекта 9, подаются на блок 7. Блок 7 обеспечивает возможность одновременной регистрации сигналов с выходов магнитометра 1 и акселерометров 3-6 или последовательной регистрации сигналов с выходов магнитометра 1 и акселерометров 3-6 за интервал времени, в течение которого угловое положение объекта 9 можно принять неизменным. Уравнения проекций векторов магнитной индукции Вxi, Вyi, Вzi, измеренных магнитометром 1, можно представить в следующем виде [4]:



где a, b, c, d, e, f, g, h, k - параметры Пуассона, характеризующие индуктивную намагниченность объекта 9 в месте размещения датчика 2;
F1i=l1iBxтi+m1iByтi+n1iBzтi;
F2i=l2iBxтi+m2iByтi+n2iBzтi;
F3i=l3iBxтi+m3iByтi+n3iBzтi;
(l1i, m1i, n1i), (l2i, m2i, n2i), (l3i, m3i, n3i) - направляющие косинусы осей системы координат OXYZ в опорной геомагнитной системе координат, являющиеся функциями магнитного курса ϕi, крена θi, тангажа ψi; i=1, 2, 3,... - моменты времени регистрации сигналов с выходов магнитометра 1 и акселерометров 3-6; Вxтi, Вyтi, Вzтi - проекции вектора индукции геомагнитного поля для i-го момента времени на оси геомагнитной системы координат;  - составляющая вектора индукции геомагнитного поля, совпадающая с горизонтальной осью геомагнитной системы координат, касательной к магнитному меридиану и направленной в сторону севера;
- составляющая вектора индукции геомагнитного поля, совпадающая с горизонтальной осью геомагнитной системы координат, касательной к магнитному меридиану и направленной в сторону севера;  - составляющая вектора индукции геомагнитного поля, совпадающая с горизонтальной осью геомагнитной системы координат, перпендикулярной плоскости магнитного меридиана и направленной в сторону востока, при этом
- составляющая вектора индукции геомагнитного поля, совпадающая с горизонтальной осью геомагнитной системы координат, перпендикулярной плоскости магнитного меридиана и направленной в сторону востока, при этом  ;
;  - составляющая вектора индукции геомагнитного поля, совпадающая с вертикальной осью геомагнитной системы координат, направленной по вертикали вниз; Вxp, Вyp, Вzp - проекции вектора магнитной индукции от остаточной намагниченности объекта 9 в месте размещения датчика 2.
- составляющая вектора индукции геомагнитного поля, совпадающая с вертикальной осью геомагнитной системы координат, направленной по вертикали вниз; Вxp, Вyp, Вzp - проекции вектора магнитной индукции от остаточной намагниченности объекта 9 в месте размещения датчика 2.
В системе уравнений (1)-(3) неизвестными параметрами являются F1i, F2i, F3i. Параметры Пуассона и Вxp, Вyp, Вzp известны. Эти параметры определяют предварительно, например, как в [5].
Сигналы с выходов каждого из акселерометров 3 и 4 пропорциональны, например, проекциям векторов переносных ускорений, обусловленных неравномерностью скорости поступательного движения и изменением направления движения объекта, и проекциям вектора ускорения силы тяжести, а сигналы с выходов каждого из акселерометров 5 и 6 пропорциональны проекциям векторов только переносных ускорений [6, 7]. Акселерометры 3 и 4, 5 и 6 размещены симметрично относительно центра тяжести объекта 9, поэтому векторы ускорений от вращения, в частности, и от рыскания объекта 9 как в местах размещения акселерометров 3 и 4, так и в местах размещения акселерометров 5 и 6 равны по величине и противоположны по направлению. Такое размещение на объекте 9 акселерометров 3 и 4, 5 и 6 обеспечивает возможность исключения погрешности определения направляющих косинусов n1i, n2i, n3i строительной оси OZ объекта 9 от ускорений, связанных с изменением скорости поступательного движения и изменением направления движения объекта. Уравнения для определения n1i, n2i, n3i можно представить в следующем виде:



где ax1i, by1i, cz1i и ax2i, by2i, cz2i проекции векторов ускорений, измеренные соответствующими акселерометрами 3 и 4; dx1i, ey1i, kz1i и dx2i, ey2i, kz2i - проекции векторов ускорений, измеренные соответствующими акселерометрами 5 и 6; g - модуль вектора ускорения силы тяжести.
По известным n1i, n2i, n3i определяют утлы крена θi и тангажа ψi. Подставив θi и ψi в (1)-(3), определяют ϕi, Вxтi и Вzтi. В предлагаемом техническом решении, как видно из уравнений (4)-(6), исключено влияние переносных ускорений объекта на погрешность определения углового положения объекта, что повышает точность определения углов курса, крена, тангажа подвижного объекта.
Ускорения объекта 9 gνx, gνy, gνz по направлению соответствующих осей ОХ, OY, OZ строительной системы координат можно определить, например, из выражений: gνx=(dx1i+dx2i)/2; gνy=(ly1i+ly2i)/2; gνz=(kz1i+kz2i)/2. Проинтегрировав gνx, gνy, gνz, приняв, что в момент времени начала движения объекта скорость его равнялась нулю, можно определить скорость объекта, а затем с учетом известных углов курса, крена, тангажа найти и координаты подвижного объекта [2].
Таким образом, предлагаемое техническое решение исключает влияние переносных ускорений объекта, в частности и ускорений от рыскания объекта, на погрешность определения углового положения подвижного объекта, что повышает точность определения углового положения упомянутого подвижного объекта. Следует отметить, что предлагаемое техническое решение обеспечивает также возможность определения скорости и координат подвижного объекта [2].
В предлагаемом техническом решении магнитометр 1, включающий магниточувствительный датчик 2, может быть выполнен как и в устройстве для измерения параметров магнитного поля [8]. В качестве регистрирующего блока 7 и вычислительного устройства 8 можно использовать преобразователь измерительный многоканальный ПИМ-1 (сертификат №15660, Госстандарт России). Трехкомпонентные акселерометры 3, 4 и трехкомпонентные акселерометры 5, 6 могут быть выполнены на базе однокомпонентных акселерометров обоих типов [7].
Литература
1. Афанасьев Ю.В. Феррозонды. Л.: Энергия, 1969, 168 с.
2. Одинова И.В., Блюмин Г.Д., Карпухин А.В. и др. Теория и конструкция гироскопических приборов и систем. М.: Высшая школа, 1971, 508 с.
3. Алимбеков Р.И., Баймуратов Ю.Г., Зайко А.И., Сорокин А.А. Установка для поверки инклинометров.//Измерительная техника, 2002, №11, c.23.
4. Кожухов В.П., Воронов В.В., Григорьев В.В. Магнитные компасы. М.: Транспорт, 1981, 216 с.
5. Смирнов Б.М. Определение индукции геомагнитного поля на фоне магнитных помех подвижного объекта.//Измерительная техника, 2003, №11,c.52-58.
6. Дьяченко К.П., Зорин Д.И., Новицкий П.В. и др. Электрические измерения. М.: Высшая школа, 1972, 520 с.
7. Мельников В.Е. Электромеханические преобразователи на базе кварцевого стекла. М.: Машиностроение, 1984, 159 с.
8. Афанасьев Ю.В. Феррозондовые приборы. Л.: Энергоатомиздат, 1986,8 188 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА (ВАРИАНТЫ) | 2004 |
|
RU2257546C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2285931C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2306529C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2006 |
|
RU2302006C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2006 |
|
RU2319157C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ БУРОВОЙ СКВАЖИНЫ (ЕГО ВАРИАНТЫ) | 2004 |
|
RU2261324C1 |
| ИНКЛИНОМЕТР | 1998 |
|
RU2172828C2 |
| ИНКЛИНОМЕТР (ВАРИАНТЫ) | 1998 |
|
RU2134427C1 |
| ИНКЛИНОМЕТР | 2003 |
|
RU2247942C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА (ВАРИАНТЫ) | 1998 |
|
RU2152002C1 |
Изобретение относится к области измерительной техники и может быть использовано в магнитной навигации для определения угловых положений автоматических подводных, надводных и летательных аппаратов, в нефтепромысловой геофизике для определения углового положения буровой скважины. Устройство для определения углового положения подвижного объекта, состоящее из трехкомпонентного магнитометра, включающего магниточувствительный датчик, четырех трехкомпонентных акселерометров, регистрирующего блока и вычислительного устройства, размещенных на подвижном объекте и включенных между собой соответствующим образом, обеспечивает исключение влияния ускорений объекта, обусловленных неравномерностью скорости поступательного движения и изменением направления движения объекта, на погрешность определения углового положения упомянутого объекта, что повышает точность определения углового положения подвижного объекта. 1ил.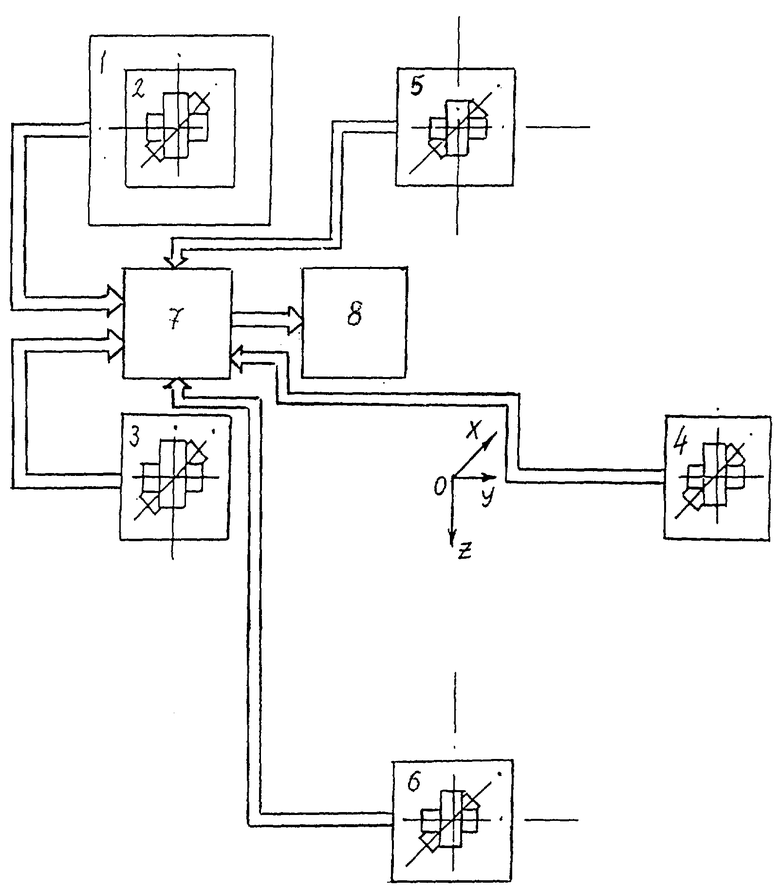
Устройство для определения углового положения подвижного объекта, включающее трехкомпонентный магнитометр и трехкомпонентный акселерометр, у которого оси чувствительности коллинеарны строительным осям системы координат OXYZ подвижного объекта с началом координат в точке О и осям магниточувствительного датчика трехкомпонентного магнитометра, отличающееся тем, что оно снабжено вторым, третьим и четвертым трехкомпонентными акселерометрами, регистрирующим блоком и вычислительным устройством, подключенным к регистрирующему блоку, входы которого подключены к выходам трехкомпонентного магнитометра, первого, второго, третьего и четвертого трехкомпонентных акселерометров, при этом первый и второй трехкомпонентные акселерометры размещены на одной оси, проходящей через начало координат точку О, но по разные стороны от начала координат, третий и четвертый трехкомпонентные акселерометры размещены на одной оси, проходящей через начало координат точку О, но по разные стороны от начала координат, оси чувствительности второго, третьего и четвертого трехкомпонентных акселерометров коллинеарны строительным осям системы координат OXYZ, у которой начало координат точка О выбрана в месте центра тяжести подвижного объекта.
| АЛИМБЕКОВ Р.И | |||
| и др | |||
| Установка для поверки инклинометров | |||
| - М.: Измерительная техника, 2002, №11, с.23 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИНДУКЦИИ ГЕОМАГНИТНОГО ПОЛЯ С ПОДВИЖНОГО ОБЪЕКТА | 2003 |
|
RU2236029C1 |
| Способ измерения проекций вектора магнитной индукции с подвижной платформы и устройство для его осуществления | 1989 |
|
SU1670637A1 |
| US 2003204361 A1, 30.10.2003 | |||
| WO 9958933 A1, 18.11.1999 | |||
| WO 9747979 A1, 18.12.1997. | |||

