Предлагаемое изобретение относится к области измерительной техники и может быть использовано в нефтепромысловой геофизике для определения углового положения буровой скважины, а также в геомагнитной навигации для определения углов курса, крена и тангажа подвижного объекта.
Известно устройство для определения углового положения буровой скважины [1], состоящее из немагнитного корпуса, трехкомпонентного магнитометрического датчика, размещенного в карданной рамке, груза-эксцентрика, закрепленного в карданной рамке, двух карданных подвесов, закрепленных на упомянутой карданной рамке, двух однокомпонентных магнитометрических датчиков, каждый из которых размещен на соответствующем карданном подвесе, при этом один однокомпонентный датчик размещен на карданном подвесе с возможностью измерения горизонтальной, а второй однокомпонентный датчик размещен на втором карданном подвесе с возможностью измерения вертикальной составляющих вектора индукции геомагнитного поля. С помощью груза-эксцентрика одна из осей трехкомпонентного датчика ориентирована по направлению продольной оси немагнитного корпуса, а вторая ось этого датчика перпендикулярна осям датчиков, размещенных на карданных подвесах. Все рамки с датчиками размещены в немагнитном корпусе.
Известное устройство [1] работает следующим образом. Под действием груза-эксцентрика, жестко связанного с карданной рамкой, которая может вращаться вокруг продольной оси немагнитного корпуса, трехкомпонентный датчик устанавливается так, что одна ось датчика остается соосной с продольной осью немагнитного корпуса, вторая ось датчика будет перпендикулярна к продольной оси немагнитного корпуса, а значит, и к оси скважины и находится в плоскости наклона немагнитного корпуса, при этом третья ось этого датчика остается ортогональной к первой и второй осям. Один из однокомпонентных датчиков находится в карданном подвесе и под действием груза устанавливается вертикально, а второй однокомпонентный датчик находится на втором карданном подвесе и под действием груза занимает горизонтальное положение. Таким образом, в известном устройстве [1] осуществляется измерение вертикальной и двух взаимно ортогональных горизонтальных составляющих вектора индукции геомагнитного поля. Вертикальная ось первого однокомпонентного датчика коллинеарна оси выбранной опорной системы координат и направлена вниз. Вторая ось выбранной системы координат направлена по касательной к магнитному меридиану в сторону севера. Направление этой оси определяют по направлению горизонтальной составляющей вектора индукции геомагнитного поля, равной векторной сумме двух измеренных горизонтальных составляющих вектора магнитной индукции. Третья ось выбранной опорной системы координат перпендикулярна первым двум направлениям и ориентирована в сторону востока. По сигналам с датчиков, пропорциональных составляющим вектора индукции геомагнитного поля на оси чувствительности датчиков, определяют расчетным путем азимутальный и зенитный углы немагнитного корпуса, а следовательно, и скважины, в которой находится немагнитный корпус.
В состав известного устройства [1] входят три подвижных элемента, чувствительных к направлению вектора силы тяжести, выполненных в виде наружной рамки и двух карданных подвесов, на которых размещены один трехкомпонентный и два однокомпонентных магнитометрических датчика. Погрешность балансировки карданных подвесов от положения равновесия приводит к погрешности определения углового положения скважины [2]. Наличие карданных подвесов и груза-эксцентрика приводит к увеличению габаритов и веса известного устройства [1]. Карданные подвесы, закрепленные на карданной рамке с осью вращения, совпадающей с продольной осью немагнитного корпуса, не обеспечивают возможность бурения скважины, у которой зенитный угол должен изменяться в пределах от 0° до 180°. Так, например, бурение двух скважин, начинающихся с вертикальных направлений, а затем с переходом на горизонтальные направления в нефтеносном слое с целью соединения этих скважин требует высокой точности определения угловых положений немагнитных корпусов. В известном техническом решении не предусмотрено решение задачи определения взаимных угловых положений датчиков, например, размещенных в карданных подвесах, и датчика в карданной рамке, ось чувствительности которого должна находиться в горизонтальной плоскости, что приводит к погрешности определения углового положения буровой скважины при наличии неколлинеарности осей чувствительности упомянутых датчиков. Кроме того, известное устройство [1] не обеспечивает возможность измерения и учета вариаций геомагнитного поля, что приводит к погрешности определения углового положения немагнитного корпуса, а значит, и буровой скважины.
Известно устройство для определения буровой скважины [3], которое по совокупности существенных признаков наиболее близко предлагаемому и принято за прототип. Известное устройство [3] состоит из немагнитного корпуса (корпуса инклинометра), продольная ось которого совпадает с направлением буровой скважины, трехкомпонентного акселерометра и трехкомпонентного магнитометра, которые размещены в немагнитном корпусе и жестко связаны с упомянутым корпусом. При этом одна из трех осей магниточувствительного датчика магнитометра и одна из трех осей чувствительности к вектору ускорения силы тяжести акселерометра коллинеарны продольной оси немагнитного корпуса.
Известное устройство [3] работает следующим образом. По сигналам с трехкомпонентного магнитометра, пропорциональным проекциям вектора индукции геомагнитного поля на оси магниточувствительного датчика магнитометра, и сигналам с трехкомпонентного акселерометра, пропорциональным проекциям вектора ускорения силы тяжести на оси чувствительности упомянутого акселерометра, определяют расчетным путем азимутальный, визирный и зенитный углы немагнитного корпуса, а значит, определяют и угловое положение буровой скважины, в которой находится немагнитный корпус.
В известном техническом решении [3] трехкомпонентный магниточувствительный датчик магнитометра и трехкомпонентный акселерометр размещают так, чтобы их оси были коллинеарны. Однако оси магниточувствительного датчика магнитометра и оси чувствительности к вектору ускорения силы тяжести акселерометра могут быть неколлинеарны [4], что приводит к погрешности определения углового положения немагнитного корпуса, а значит, и буровой скважины. Кроме того, известное устройство [3] не обеспечивает возможность измерения и учета вариаций геомагнитного поля, что приводит к погрешности определения углового положения немагнитного корпуса, а значит, и буровой скважины.
Задачей предлагаемого изобретения является разработка устройства для определения углового положения буровой скважины, снижающего влияние вариаций геомагнитного поля и наличие неколлинеарности осей трехкомпонентных датчиков на погрешность определения углового положения буровой скважины, а также отличающегося от известных устройств уменьшением средств измерений, размещаемых в немагнитном корпусе упомянутого устройства. Поставленная задача решается за счет использования трехкомпонентного магнитометра, размещенного на поверхности у начала буровой скважины, у которого оси магниточувствительного датчика жестко связаны с географической системой координат, а измерение проекций вектора индукции геомагнитного поля этим магнитометром осуществляется одновременно с измерением проекций вектора индукции геомагнитного поля магнитометром, размещенным в немагнитном корпусе устройства для определения углового положения буровой скважины.
Предлагаемое изобретение представляет собой два устройства для определения углового положения буровой скважины, связанных настолько между собой, что они образуют единый общий изобретательский замысел.
Предлагаемое устройство для определения углового положения буровой скважины (по первому варианту), включающее немагнитный корпус, продольная ось которого совпадает с направлением буровой скважины, и трехкомпонентный магнитометр, у магниточувствительного датчика которого известны направления осей в системе координат немагнитного корпуса, в котором размещен упомянутый магнитометр, снабжено вторым трехкомпонентным магнитометром, регистрирующим блоком, входы которого подключены к выходам первого и второго магнитометров, и вычислительным устройством, подключенным к регистрирующему блоку, выполненному с возможностью одновременной регистрации сигналов с выходов упомянутых магнитометров, при этом второй магнитометр, регистрирующий блок и вычислительное устройство размещены у начала буровой скважины, а оси магниточувствительного датчика второго магнитометра жестко связаны с географической системой координат.
Предлагаемое устройство для определения углового положения буровой скважины (по второму варианту), включающее немагнитный корпус, продольная ось которого совпадает с направлением буровой скважины, и трехкомпонентный магнитометр, у магниточувствительного датчика которого известны направления осей в системе координат немагнитного корпуса, в котором размещен упомянутый магнитометр, снабжено вторым трехкомпонентным магнитометром, регистрирующим блоком, входы которого подключены к выходам первого и второго магнитометров, вычислительным устройством, подключенным к регистрирующему блоку, выполненному с возможностью одновременной регистрации сигналов с выходов упомянутых магнитометров, и стабилизатором токов, выходы которого подключены к входам соответствующих магниточувствительных датчиков первого и второго магнитометров, при этом второй магнитометр, регистрирующий блок, вычислительное устройство и стабилизатор токов размещены у начала буровой скважины, а оси магниточувствительного датчика второго магнитометра жестко связаны с географической системой координат.
Применение в предлагаемом устройстве для определения углового положения буровой скважины по первому варианту немагнитного корпуса и трехкомпонентного магнитометра в совокупности с вторым трехкомпонентным магнитометром, регистрирующим блоком и вычислительным устройством, размещенными и включенными между собой соответствующим образом, обеспечивает определение углового положения немагнитного корпуса, а значит, и буровой скважины, уменьшение погрешности определения углового положения буровой скважины от вариаций геомагнитного поля и исключение упомянутой погрешности от неколлинеарности осей магниточувствительных датчиков магнитометров.
Применение в предлагаемом устройстве для определения углового положения буровой скважины по второму варианту немагнитного корпуса и трехкомпонентного магнитометра в совокупности с вторым трехкомпонентным магнитометром, регистрирующим блоком, вычислительным устройством и стабилизатором токов, размещенными и включенными между собой соответствующим образом, обеспечивает определение углового положения буровой скважины, существенное уменьшение погрешности определения углового положения буровой скважины от вариаций геомагнитного поля и исключение упомянутой погрешности от неколлинеарности осей магниточувствительных датчиков первого и второго магнитометров.
Таким образом, технический результат предлагаемого устройства для определения углового положения буровой скважины выражается в размещении в немагнитном корпусе только одного трехкомпонентного магнитометра и в определении углового положения буровой скважины по измеренным проекциям двух векторов индукции геомагнитного поля, что уменьшает погрешность определения углового положения буровой скважины от вариаций геомагнитного поля и исключает упомянутую погрешность от неколлинеарности осей магниточувствительных датчиков магнитометров. В предлагаемом техническом решении вариации геомагнитного поля являются полезными (информативными) сигналами, а не как в известных технических решениях [1-3] - магнитными помехами, при этом неколлинеарность осей магниточувствительных датчиков первого и второго магнитометров является источником информации об угловом положении немагнитного корпуса предлагаемого устройства, а значит, и буровой скважины.
Сущность предлагаемого технического решения поясняется чертежом, на котором изображена структурная схема устройства для определения углового положения буровой скважины по первому и второму вариантам.
Предлагаемое устройство для определения углового положения буровой скважины по первому варианту состоит (см. чертеж) из немагнитного корпуса 1, трехкомпонентного магнитометра 2, включающего магниточувствительный датчик 3, второго трехкомпонентного магнитометра 4, включающего магниточувствительный датчик 5, регистрирующего блока 6 и вычислительного устройства 7. Выходы магнитометров 2 и 4 подключены к блоку 6, который подключен к вычислительному устройству 7. Магнитометр 2 размещен в корпусе 1 и жестко связан с ним. Оси 0'Х', 0'У, 0'Z' являются осями декартовой системы координат 0'Х'У'Z' как корпуса 1, так и осей датчика 3. При этом продольная ось NN' корпуса 1 коллинеарна оси 0'Z' датчика 3. Оси 0Х, 0У, 0Z датчика 5, являющиеся осями декартовой системы координат OXYZ, коллинеарны осям географической системы координат, то есть ось 0Х касательная к географическому меридиану и направлена на север, ось 0У перпендикулярна плоскости географического меридиана и направлена на восток, а ось 0У перпендикулярна осям 0Х и 0У. Система координат OXYZ образует правую координатную систему. Магнитометр 4, блок 6 и устройство 7 размещены на поверхности у начала буровой скважины.
Предлагаемое устройство для определения углового положения буровой скважины по второму варианту состоит (см. чертеж) из немагнитного корпуса 1, трехкомпонентного магнитометра 2, включающего магниточувствительный датчик 3, второго трехкомпонентного магнитометра 4, включающего магниточувствительный датчик 5, регистрирующего блока 6, вычислительного устройства 7 и стабилизатора токов 8. Выходы магнитометров 2 и 4 подключены к блоку 6, который подключен к вычислительному устройству 7. Выходы стабилизатора токов 8 подключены соответственно к датчикам 3 и 5. Магнитометр 2 размещен в корпусе 1 и жестко связан с ним. Оси 0'Х', 0'У', 0'Z' являются осями декартовой системы координат 0'Х'У'Z' как корпуса 1, так и осей датчика 3. При этом продольная ось NN' корпуса 1 коллинеарна оси 0'Z' датчика 3. Оси 0X, 0У, 0Z датчика 5, являющиеся осями декартовой системы координат OXYZ, коллинеарны осям географической системы координат. Магнитометр 4, блок 6, устройство 7 и стабилизатор токов 8 размещены на поверхности у начала буровой скважины.
Предлагаемое устройство для определения углового положения буровой скважины по первому варианту работает следующим образом. Магнитометрами 2 и 4 (фиг.1) измеряют проекции векторов индукции геомагнитного поля на оси соответствующих датчиков 3 и 5 [4]. Сигналы с выходов магнитометров 2 и 4, пропорциональные проекциям векторов индукции геомагнитного поля, подаются на блок 6. После остановки корпуса 1 блок 6 обеспечивает возможность одновременной регистрации сигналов с выходов магнитометров 2 и 4, по крайней мере, для трех моментов времени. Из измеренных проекций векторов магнитной индукции магнитометрами 2 и 4 выбирают проекции векторов магнитной индукции, для которых векторы магнитной индукции, измеренные магнитометром 4 будут независимы. По измеренным и выбранным проекциям векторов магнитной индукции магнитометрами 2 и 4 для трех моментов времени определяют направляющие косинусы осей датчика 3 в географической системе координат, а значит, определяют угловое положение корпуса 1 и буровой скважины из следующей системы уравнений:



где Вxij, Вyij, Вzij - проекции векторов индукции геомагнитного поля, измеренные магнитометром 2 для i моментов времени и j-го номера остановки корпуса 1; Вxтij Вyтij, Вzтij - проекции векторов индукции геомагнитного поля, измеренные магнитометром 4 для i моментов времени и j-го номера остановки корпуса 1; (l1j, m1j, n1j), (l2j, m2j, n2j), (l3j, m3j, n3j) - направляющие косинусы осей 0'X', 0'У', 0'Z' датчика 3 в опорной географической системе координат, оси которой коллинеарны осям ОХ, 0У, 0Z датчика 5; j - номер остановки корпуса 1 для определения углового положения скважины. Каждая из проекций Вxij, Вyij, Вzij,и Вxтij Вyтij, Вzтij является суммой индукции постоянного и переменного (вариационного) магнитного поля Земли на соответствующие оси датчиков 3 и 5. Определение направляющих косинусов осей 0'Х', 0'У', 0'Z' осуществляется в устройстве 7. Направляющие косинусы осей 0'X', 0'У' 0'Z' являются функциями углов курса, крена, тангажа, а также и углов Эйлера [5]. Поэтому для каждого j по направляющим косинусам корпуса 1 устройство 7 определяет также азимутальный, визирный и зенитный углы корпуса 1.
Предлагаемое устройство для определения углового положения буровой скважины по второму варианту работает следующим образом. Магнитометрами 2 и 4 (см. чертеж) измеряют проекции векторов индукции геомагнитного поля на оси соответствующих датчиков 3 и 5 [4]. Сигналы с выходов магнитометров 2 и 4, пропорциональные проекциям векторов индукции геомагнитного поля, подаются на регистрирующий блок 6. После остановки корпуса 1 блок 6 обеспечивает возможность одновременной регистрации сигналов с выходов магнитометров 2 и 4, по крайней мере, для четырех моментов времени. В первый момент времени для j-го номера остановки корпуса 1 с целью определения углового положения скважины осуществляют измерение проекций вектора индукции геомагнитного поля Bx1j, Вy1j, Вz1j, магнитометром 2 и проекции вектора индукции геомагнитного поля Вxт1j Вyт1j, Вzт1j, магнитометром 4. Каждая из проекций - Вxij, Вyij, Вzij и Вxтij Вyтij, Вzтij является суммой индукции постоянного и переменного (вариационного) магнитного поля Земли на соответствующие оси датчиков 3 и 5. От стабилизатора токов 8 протекают токи в катушках компенсации датчика 3 [4], воспроизводящие в объеме магниточувствительного элемента датчика 3 составляющие вектора магнитной индукции Bx1j, Вy1j, Вz1j обратной полярностью. От стабилизатора токов 8 протекают токи в катушках компенсации датчика 5, воспроизводящие в объеме магниточувствительного элемента датчика 5 составляющие вектора магнитной индукции Вxт1j Вyт1j, Вzт1j с обратной полярностью. Компенсация составляющих индукции геомагнитного поля в объемах магниточувствительных элементов датчиков 3 и 5 обеспечивает возможность измерения магнитометрами 2 и 4 слабых магнитных полей, в том числе и вариаций геомагнитного поля, с абсолютной погрешностью, определяемой нестабильностью воспроизведения магнитных полей в объемах магниточувствительных элементов датчиков 3 и 5. Затем осуществляют одновременное измерение проекций векторов магнитной индукции магнитометрами 2 и 4, по крайней мере, для второго, третьего и четвертого моментов времени. Из измеренных проекций векторов магнитной индукции магнитометрами 2 и 4, начиная с второго момента времени, выбирают проекции векторов магнитной индукции, для которых векторы магнитной индукции, измеренные магнитометром 4 будут независимы. По измеренным и выбранным проекциям векторов магнитной индукции магнитометрами 2 и 4 для четырех моментов времени определяют направляющие косинусы осей датчика 3 в географической системе координат (в системе координат, образованной осями датчика 5), а значит, определяют угловое положение корпуса 1 и буровой скважины из следующей системы уравнений:



где Вx(i+1)j, Вy(i+1)j, Вz(i+1)j - проекции векторов магнитной индукции, измеренные магнитометром 2 для (i+1) моментов времени и j-го номера остановки корпуса 1; (l1j, m1j, n1j), (l2j, m2j, n2j), (l3j, m3j, n3j) - направляющие косинусы осей 0'Х', 0'У', 0'Z' датчика 3 в опорной географической системе координат, оси которой коллинеарны осям 0Х, 0У, 0Z датчика 5; j - номер остановки корпуса 1 для определения углового положения скважины; Вхвj, Вyвj, Вzвj - проекции векторов магнитной индукции, измеренные магнитометром 4, для (i+1) моментов времени и j-го номера остановки корпуса 1, равные вариациям индукции геомагнитного поля. Регистрация сигналов, пропорциональных Вхвj, Вyвj, Вzвj, осуществляется одновременно с сигналами, пропорциональными Вx(i+1)j, Вy(i+1)j, Вz(i+1)j. Определение направляющих косинусов осей 0'Х', 0'У', 0'Z' осуществляется в устройстве 7, которые являются функциями углов курса, крена, тангажа, а также углов Эйлера корпуса 1 [5]. Поэтому для каждого j по направляющим косинусам корпуса 1 устройство 7 определяет азимутальный, визирный и зенитный углы корпуса 1.
Таким образом, в предлагаемом техническом решении определение углового положения буровой скважины осуществляется по измеренным проекциям векторов индукции геомагнитного поля с учетом его вариаций (по первому варианту) и по измеренным проекциям векторов магнитной индукции вариаций геомагнитного поля (по второму варианту), которые по сравнению с аналогом и прототипом являются не магнитными помехами, а полезными сигналами, при этом в предлагаемом техническом решении в отличие от известных неколлинеарность осей датчика магнитометра 2, размещенного в корпусе 1, осям датчика магнитометра 4 является источником информации, а не источником погрешности определения углового положения скважины. Кроме того, в предлагаемом техническом решении по сравнению с известными [1-3] в немагнитном корпусе 1 размещен только один магнитометр, что упрощает конструкцию устройства, опускаемого в скважину.
Следует отметить, что в предложенном техническом решении по второму варианту по сравнению с первым и известными техническими решениями погрешность определения углового положения буровой скважины не зависит от магнитных аномалий в местах прохождения немагнитного корпуса 1 (фиг.1), так как определение углового положения немагнитного корпуса, а значит, и скважины осуществляется только по вариациям геомагнитного поля.
В предлагаемом техническом решении магнитометры 2 и 4 (фиг.1) и стабилизатор токов 8 могут быть выполнены, как и в устройстве для измерения параметров магнитного поля [4]. В качестве регистрирующего блока 6 и вычислительного устройства 7 можно использовать преобразователь измерительный многоканальный ПИМ-1 (сертификат №15660, Госстандарт России). Корпус 1 может быть выполнен из материала, аналогичного, как и в [1-3].
Литература
1. АС №804822, Е 21 8 47/02. Инклинометр / Понаморев В.Н., Нехорошков В.Л., Мухаметшин А.А. // Открытия. Изобретения. 1981. БИ №6.
2. Ковшов Г.Н., Солонина Н.Н. Увеличение виброустойчивости преобразователя угла установки отклонителя. / Геофизическая аппаратура. Л.: "Недра". 1984. Вып. 79. С.105-109.
3. Алимбеков Р.И., Баймуратов Ю.Г., Зайко А.И., Сорокин А.А. Установка для поверки инклинометров УПИ-2//Измерительная техника. 2002. №11. С.23.
4. Афанасьев Ю.В. Феррозондовые приборы. Л.: "Энергоатомиздат". 1986. 188 с.
5.Бронштейн И.Н., Семендяев К.А. Справочник по математике. М.: "Наука". 1967. 608 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА (ВАРИАНТЫ) | 2004 |
|
RU2257546C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2285931C1 |
| ИНКЛИНОМЕТР | 2003 |
|
RU2247942C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2278356C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2306529C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2006 |
|
RU2302006C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2006 |
|
RU2319157C1 |
| ИНКЛИНОМЕТР (ВАРИАНТЫ) | 1998 |
|
RU2134427C1 |
| ИНКЛИНОМЕТР | 1998 |
|
RU2172828C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ, ХАРАКТЕРИЗУЮЩИХ НАМАГНИЧЕННОСТЬ ПОДВИЖНОГО ОБЪЕКТА | 2004 |
|
RU2247404C1 |
Изобретение относится к области измерительной техники и может быть использовано в нефтепромысловой геофизике для определения углового положения буровой скважины, а также в геомагнитной навигации для определения углов курса, крена и тангажа подвижного объекта. Техническим результатом изобретения является снижение влияния вариаций геомагнитного поля и наличия неколлинеарности осей трехкомпонентных датчиков на погрешность определения углового положения буровой скважины, а также уменьшение средств измерений. Для этого разработано два варианта устройства. По первому варианту устройство состоит из немагнитного корпуса, двух трехкомпонентных магнитометров, каждый из которых включает магниточувствительный датчик, регистрирующего блока и подключенного к нему вычислительного устройства. Причем один магнитомер, регистрирующий блок и вычислительное устройство размещены у начала буровой скважины, а оси магниточувствительного датчика этого магнитомера жестко связаны с географической системой координат. Устройство по второму варианту дополнительно содержит стабилизатор токов, который выходами подключен к входам магниточувствительных датчиков первого и второго магнитомеров. При этом стабилизатор токов также находится у начала буровой скважины. 2 н.п. ф-лы, 1 ил.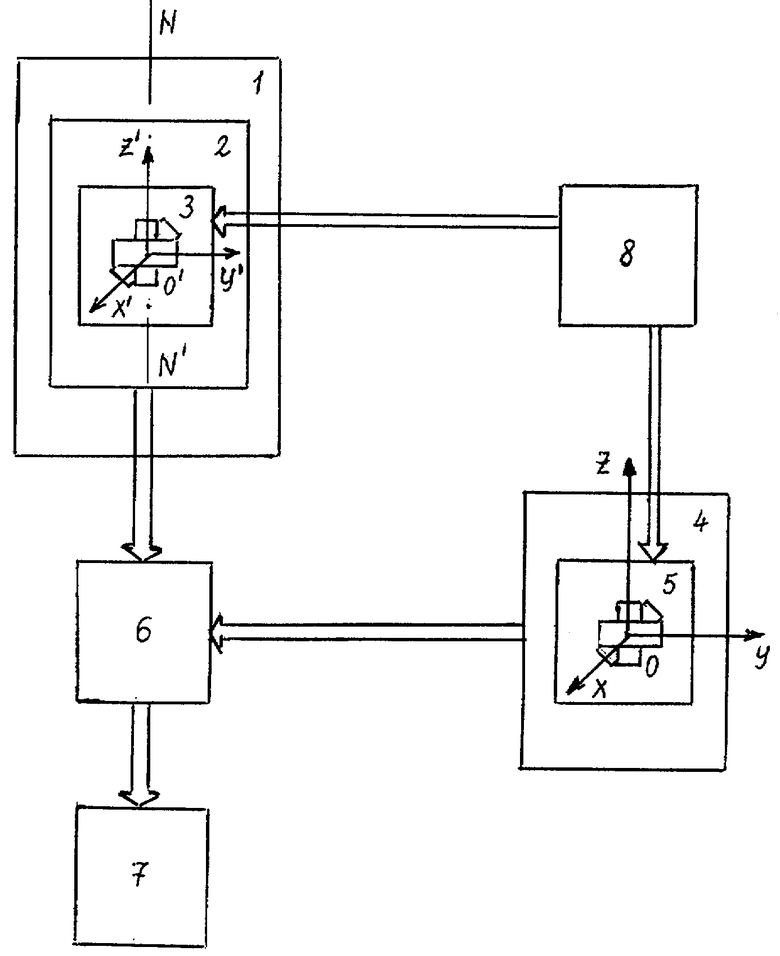
| АЛИМБЕКОВ Р.И | |||
| и др | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| М.: ИЗМЕРИТЕЛЬНАЯ ТЕХНИКА, 2002, № 1, с | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |

