Предлагаемое изобретение относится к области измерительной техники и может быть использовано в магниторазведке для поиска полезных ископаемых, в области космических исследований для измерения магнитного поля околоземного пространства и магнитного поля планет, в магнитной навигации для определения местоположения судна и т.д.
Известен способ определения параметров Пуассона и проекций вектора магнитной индукции от жесткой намагниченности объекта, характеризующих намагниченность упомянутого объекта [1], заключающийся в измерении в опорной системе координат углов курса, крена, тангажа объекта синхронно с измерением модулей результирующих векторов магнитной индукции внешнего магнитного поля и магнитного поля объекта при различных угловых положениях объекта, измерении модуля вектора индукции внешнего магнитного поля при отсутствии объекта, а затем по результатам измерений определении трех параметров Пуассона, трех сумм параметров Пуассона и вектора магнитной индукции от жесткой намагниченности объекта.
Известно устройство [2], реализующее способ определения параметров, характеризующих намагниченность объекта, содержащее размещенные на объекте модульный магнитометр, углоизмерительное устройство и устройство обработки информации. При этом выход модульного магнитометра и три выхода углоизмерительного устройства подключены к устройству обработки информации. В известном техническом решении углоизмерительное устройство выполнено из трехкомпонентного магнитометра. Известное устройство работает следующим образом. Измеряют углоизмерительным устройством углы курса, крена, тангажа объекта синхронно с измерением модульным магнитометром значений модулей векторов магнитной индукции при различных угловых положениях объекта. По результатам измеренных углов, модулей векторов магнитной индукции и известному модулю вектора индукции геомагнитного поля определяют три коэффициента (параметра) Пуассона, три суммы параметров Пуассона и вектор магнитной индукции от жесткой намагниченности объекта по методу [1].
В известном способе [1] и реализующем его устройстве [2] за время измерений углов курса, крена, тангажа и модулей векторов магнитной индукции при различных угловых положениях объекта принимают модуль вектора индукции внешнего магнитного поля, в частности геомагнитного поля, неизменным, то есть не учитываются вариации геомагнитного поля. Отсутствие информации о вариациях геомагнитного поля при измерении модулей магнитной индукции для соответствующих угловых положений объекта приводит к погрешности определения параметров, характеризующих намагниченность объекта. Кроме того, в известных технических решениях [1, 2] определение параметров, характеризующих намагниченность объекта, осуществляется с использованием измеренных углоизмерительным устройством углов курса, крена, тангажа. Погрешности измерений этих углов, равные десятым долям угловых минут, могут привести к существенным погрешностям определения параметров, характеризующих намагниченность объекта [3].
Известен способ определения параметров, характеризующих намагниченность объекта, и устройство для его осуществления [4], который по совокупности существенных признаков наиболее близок предлагаемому и принят за прототип. Известный способ определения параметров, характеризующих намагниченность объекта [4], заключается в измерении на объекте в опорной системе координат проекций результирующих векторов индукции внешнего магнитного поля (геомагнитного поля) и магнитного поля объекта синхронно с измерением углов курса, крена, тангажа объекта для десяти угловых положений и измерении проекций вектора индукции геомагнитного поля при отсутствии объекта, а затем по результатам измерений определении параметров, характеризующих намагниченность объекта. Известное устройство, реализующее способ [4], состоит из размещенных на подвижном ферромагнитном объекте трехкомпонентного магнитометрического датчика, трех усилительно-преобразовательных блоков, первые входы которых подключены к выходам упомянутого датчика, генератора переменных напряжений, первый выход которого подключен к входу трехкомпонентного датчика, а второй выход - к вторым входам усилительно-преобразовательных блоков, регистрирующего блока, входы которого подключены к выходам усилительно--преобразовательных блоков, углоизмерительного устройства, выходы которого подключены к трем дополнительным входам регистрирующего блока, выполненного с возможностью синхронной регистрации сигналов, пропорциональных значениям проекций векторов магнитной индукции и углов курса, крена, тангажа объекта, и устройства обработки информации, подключенного к выходу регистрирующего блока.
Известное устройство работает следующим образом. На вход трехкомпонентного магнитометрического датчика, в частности феррозонда, подается с генератора переменное напряжение, возбуждающее этот датчик. В результате на выходах датчика появляются три ЭДС второй гармоники, каждая из которых пропорциональна проекции вектора магнитной индукции на соответствующую магнитную ось датчика [5]. Выходные сигналы с датчика усиливаются и детектируются в соответствующих усилительно-преобразовательных блоках. Для детектирования сигналов на вторые входы усилительно-преобразовательных блоков подается переменное напряжение с генератора переменных напряжений. На входы регистрирующего блока поступают сигналы с выходов усилительно-преобразовательных блоков, пропорциональные проекциям векторов магнитной индукции при изменении углового положения объекта, и выходные сигналы с углоизмерительного устройства, пропорциональные углам курса, крена, тангажа объекта. Регистрирующий блок обеспечивает синхронную регистрацию сигналов, пропорциональных значениям проекций векторов магнитной индукции и углов курса, крена, тангажа объекта, по крайней мере, для десяти разных угловых положений объекта и передачу их на устройство обработки информации, при введении в которое значений проекций вектора индукции геомагнитного поля осуществляется определение всех девяти параметров Пуассона и проекций вектора магнитной индукции от жесткой намагниченности объекта.
В известном техническом решении [4] за время измерений углов курса, крена, тангажа и проекций векторов магнитной индукции от одного из угловых положений объекта до следующего принимают проекции внешнего магнитного поля (геомагнитного поля) постоянными, то есть, как и в аналоге, не учитывают вариации геомагнитного поля. Отсутствие информации о вариациях геомагнитного поля при измерении проекций векторов магнитной индукции для соответствующих угловых положений объекта приводит к погрешностям определения параметров Пуассона и проекций вектора магнитной индукции от жесткой намагниченности объекта. Кроме того, в известном техническом решении определение параметров, характеризующих намагниченность объекта, осуществляется с использованием измеренных углоизмерительным устройством значений углов курса, крена, тангажа, погрешности измерений которых, равные десятым долям угловых минут, могут привести к существенным погрешностям определения параметров, характеризующих намагниченность объекта.
Задачей предлагаемого изобретения является разработка способа определения параметров, характеризующих намагниченность объекта, и устройства для его осуществления, снижающего или исключающего влияние вариаций геомагнитного поля и погрешностей измерения углов курса, крена, тангажа на определение параметров Пуассона и проекций вектора магнитной индукции от жесткой намагниченности объекта. Поставленная задача решается за счет воспроизведения в одной точке пространства результирующего вектора магнитной индукции, равного внешнему магнитному полю и магнитному полю объекта, измеренного в первый момент времени, но ориентированного в противоположном направлении, воспроизведения во второй точке пространства вектора индукции внешнего магнитного поля, измеренного также в первый момент времени, но ориентированного в противоположном направлении, привязки магнитных осей двух трехкомпонентных магнитометрических датчиков, размещенных соответственно в первой и второй точках пространства, и постоянства положения объекта и обоих датчиков в опорной, например, геомагнитной системе координат.
Предлагаемый способ определения параметров, характеризующих намагниченность объекта, заключается в измерении в выбранной опорной системе координат проекций вектора магнитной индукции внешнего магнитного поля и проекций результирующего вектора индукции магнитного поля объекта и внешнего магнитного поля, измерении в первый момент времени проекций результирующего вектора магнитной индукции внешнего магнитного поля и магнитного поля объекта в одной точке пространства и проекций вектора магнитной индукции внешнего магнитного поля во второй точке пространства, удаленной от объекта на расстояние R, для которого одновременно выполняются два условия R≥3L и R≥r, где L - максимальный линейный размер объекта, r - расстояние от первой точки пространства до любой точки объекта, воспроизведении в первой точке пространства вектора магнитной индукции, равного по величине и противоположного по направлению вектору магнитной индукции, измеренному в этой же точке пространства в первый момент времени, а во второй точке пространства воспроизведении вектора магнитной индукции, равного по величине и противоположного по направлению вектору магнитной индукции, измеренному в этой же точке пространства в первый момент времени, затем одновременном измерении проекций векторов магнитной индукции в первой и второй точках пространства, по крайней мере, для второго, третьего и четвертого моментов времени и по измеренным проекциям векторов магнитной индукции в первой и второй точках пространства определении параметров, характеризующих намагниченность объекта, из следующей системы уравнений:






где 





Bхт(i+1),1; Bут(i+1),1, Bzт(i+1),1 - проекции векторов магнитной индукции во второй точке пространства, для (i+1) моментов времени при направляющих косинусах  ;
;  ; i=1, 2, ...; a, b, c, d, e, f, g, h, k и Вxp, Вур, Вzp - параметры Пуассона и проекции вектора магнитной индукции от жесткой намагниченности объекта, характеризующие намагниченность объекта; Вx1 Вy1, Вz1 и Вхт1, Вут1, Вzт1 - проекции вектора магнитной индукции и вектора индукции внешнего магнитного поля, измеренные соответственно в первой и второй точках пространства в первый момент времени; Вx(i+1), By(i+1), Bz(i+1) - проекции векторов магнитной индукции, измеренные в первой точке пространства для (i+1) моментов времени; (l1, m1, n1), (l2, m2,n2), (l3, m3, n3) - направляющие косинусы осей, в направлениях которых измеряют составляющие векторов магнитной индукции в первой точке пространства в выбранной опорной системе координат во второй точке пространства, при этом измеряют все проекции векторов магнитной индукции в первой и второй точках пространства при постоянном положении объекта в упомянутой опорной системе координат.
; i=1, 2, ...; a, b, c, d, e, f, g, h, k и Вxp, Вур, Вzp - параметры Пуассона и проекции вектора магнитной индукции от жесткой намагниченности объекта, характеризующие намагниченность объекта; Вx1 Вy1, Вz1 и Вхт1, Вут1, Вzт1 - проекции вектора магнитной индукции и вектора индукции внешнего магнитного поля, измеренные соответственно в первой и второй точках пространства в первый момент времени; Вx(i+1), By(i+1), Bz(i+1) - проекции векторов магнитной индукции, измеренные в первой точке пространства для (i+1) моментов времени; (l1, m1, n1), (l2, m2,n2), (l3, m3, n3) - направляющие косинусы осей, в направлениях которых измеряют составляющие векторов магнитной индукции в первой точке пространства в выбранной опорной системе координат во второй точке пространства, при этом измеряют все проекции векторов магнитной индукции в первой и второй точках пространства при постоянном положении объекта в упомянутой опорной системе координат.
Измерение в предлагаемом техническом решении в первый момент времени проекций векторов магнитной индукции в двух точках пространства, выбранных на соответствующих расстояниях от объекта, воспроизведение в каждой из упомянутых точек пространства соответствующих векторов магнитной индукции, а затем одновременное измерение в каждой из двух точек пространства проекций векторов магнитной индукции, по крайней мере, для второго, третьего и четвертого моментов времени обеспечивают определение параметров, характеризующих намагниченность объекта, при отсутствии изменения положения объекта в опорной системе координат, что снижает погрешность определения параметров, характеризующих намагниченность объекта, от погрешностей измерения угловых положений объекта и вариаций геомагнитного поля. При этом в предлагаемом техническом решении вариации геомагнитного поля являются информативными сигналами в отличие от известных технических решений [1-4], где вариации геомагнитного поля являются магнитными помехами.
Предлагаемое устройство для определения параметров, характеризующих намагниченность объекта, включающее трехкомпонентный магнитометрический датчик, три усилительно-преобразовательных блока, первые входы которых подключены к соответствующим выходам трехкомпонентного датчика, генератор переменных напряжений, первый выход которого подключен к первому входу трехкомпонентного датчика, а второй выход - к вторым входам усилительно-преобразовательных блоков, регистрирующий блок, первые три входа которого подключены соответственно к первым выходам первого, второго и третьего усилительно-преобразовательных блоков, углоизмерительное устройство, подключенное к регистрирующему блоку, выполненному с возможностью синхронной регистрации сигналов, пропорциональных значениям проекций векторов магнитной индукции и углов крена, тангажа датчика, и устройство обработки информации, подключенное к выходу регистрирующего блока, снабжено регулировочным устройством, на котором размещен трехкомпонентный датчик, немагнитным основанием, на котором размещены углоизмерительное устройство и регулировочное устройство, выполненное с возможностью изменения углов крена и тангажа трехкомпонентного датчика относительно немагнитного основания, поворотным устройством, на котором установлено немагнитное основание, вторым трехкомпонентным магнитометрическим датчиком, четвертым, пятым и шестым усилительно-преобразовательными блоками, первые входы которых подключены к соответствующим выходам второго трехкомпонентного датчика, вторым генератором переменных напряжений, первые три выхода которого подключены соответственно к первому, второму и третьему входам второго трехкомпонентного датчика, а четвертый выход - к вторым входам четвертого, пятого и шестого усилительно-преобразовательных блоков, первые выходы которых подключены соответственно к четвертому, пятому и шестому входам регистрирующего блока, вторым углоизмерительным устройством, вторым немагнитным основанием, вторым регулировочным устройством, размещенным с вторым углоизмерительным устройством на втором немагнитном основании, вторым поворотным устройством, на котором установлено немагнитное основание, и стабилизатором токов, при этом второй трехкомпонентный датчик размещен на втором регулировочном устройстве, которое выполнено с возможностью изменения углов крена и тангажа второго трехкомпонентного датчика относительно второго немагнитного основания, третий и четвертый выходы первого генератора переменных напряжений подключены соответственно к второму и третьему входам первого трехкомпонентного датчика, вторые выходы первого, второго и третьего усилительно-преобразовательных блоков подключены соответственно к четвертому, пятому и шестому входам первого трехкомпонентного датчика, вторые выходы четвертого, пятого и шестого усилительно-преобразовательных блоков подключены соответственно к четвертому, пятому и шестому входам второго трехкомпонентного датчика, первые три выхода стабилизатора токов подключены соответственно к седьмому, восьмому и девятому входам первого трехкомпонентного датчика, а четвертый, пятый и шестой выходы стабилизатора токов подключены соответственно к седьмому, восьмому и девятому входам второго трехкомпонентного датчика.
Применение в предлагаемом техническом решении трехкомпонентного магнитометрического датчика, трех усилительно-преобразовательных блоков, генератора переменных напряжений, регистрирующего блока, углоизмерительного устройства, устройства обработки информации в совокупности с вторым углоизмерительным устройством, вторым трехкомпонентным магнитометрическим датчиком, вторым генератором переменных напряжений, четвертым, пятым и шестым усилительно-преобразовательными блоками, двумя регулировочными устройствами, двумя немагнитными основаниями, двумя поворотными устройствами и стабилизатором токов, размещенных и включенных между собой соответствующим образом, обеспечивает снижение погрешностей определения параметров, характеризующих намагниченность объекта, от вариаций геомагнитного поля, от погрешностей измерения угловых положений объекта и магнитометрических датчиков в выбранной опорной системе координат.
Таким образом, технический результат предлагаемого изобретения выражается в определении параметров, характеризующих намагниченность объекта, по измеренным проекциям магнитной индукции вариаций внешнего поля (геомагнитного поля), что обеспечивает исключение изменения углового положения объекта для решения поставленной задачи, а следовательно, и исключение погрешностей определения параметров, характеризующих намагниченность объекта от погрешностей измерения угловых положений объекта. В предлагаемом техническом решении вариации геомагнитного поля являются полезными (информативными) сигналами, а не как в известных технических решениях [1-4] - магнитными помехами, которые приводят к погрешностям определения параметров, характеризующих намагниченность объекта.
Сущность предлагаемого технического решения поясняется следующими графическими материалами.
На чертеже изображена структурная схема устройства, реализующего способ определения параметров, характеризующих намагниченность объекта.
Предлагаемое устройство, реализующее способ определения параметров, характеризующих намагниченность объекта, состоит из двух трехкомпонентных магнитометрических датчиков 1 и 2, шести усилительно-преобразовательных блоков 3-8, двух генераторов переменных напряжений 9 и 10, регистрирующего блока 11, устройства обработки информации 12, двух регулировочных устройств 13 и 14, двух немагнитных оснований 15 и 16, двух поворотных устройств 17 и 18, двух утлоизмерительных устройств 19 и 20, стабилизатора токов 21 и объекта 22, для которого определяют параметры Пуассона и проекции вектора магнитной индукции от жесткой намагниченности в месте размещения датчика 1, оси которого совпадают, например, с осями опорной системы координат OXYZ.
Первые входы блоков 3-5 подключены к соответствующим выходам датчика 1, первые входы блоков 6-8 подключены к соответствующим выходам датчика 2, три входа датчика 1 подключены к генератору 9, три входа датчика 2 подключены к генератору 10, вторые входы блоков 3-5 подключены к выходу генератора 9, вторые входы блоков 6-8 подключены к выходу генератора 10, блоки 3-8 и устройства 19 и 20 подключены к блоку 11, которое подключено к устройству 12. Датчик 1 размещен на устройстве 13, датчик 2 размещен на устройстве 14, на основании 15 размещены устройство 19 и устройство 13, выполненное с возможностью изменения углов крена и тангажа датчика 1 относительно основания 15, на основании 16 размещены устройство 20 и устройство 14, выполненное с возможностью изменения углов крена и тангажа датчика 2 относительно основания 16. Вторые выходы А1-А3 блоков 3-5 подключены к соответствующим входам датчика 1, вторые выходы Е1-Е3 блоков 6-8 подключены к соответствующим входам датчика 2. Выходы Т1-Т3 стабилизатора токов 21 подключены к соответствующим входам датчика 1, а выходы Т4-T6 стабилизатора токов 21 подключены к соответствующим входам датчика 2. Основание 15 установлено на поворотном устройстве 17, а основание 16 - на поворотном устройстве 18.
Предлагаемое устройство, реализующее способ определения параметров, характеризующих намагниченность объекта, работает следующим образом. Конструирование и изготовление датчика 1, в частности феррозондового датчика, и углоизмерительного устройства 19, которое может быть выполнено на основе трех однокомпонентных акселерометров, не обеспечивает ортогональность магнитных осей датчика 1 и ортогональность осей чувствительности устройства 19 [5, 6]. Поэтому предварительно приводят магнитные оси датчика 1 и оси чувствительности устройства 19 к ортогональным базисам [5, 7]. С помощью регулировочного устройства 13 осуществляют привязку ортогонального базиса датчика 1 к ортогональному базису осей чувствительности устройства 19. Аналогично с помощью устройств 14, 16, 20 осуществляют привязку ортогонального базиса датчика 2 к осям ортогонального базиса устройства 20 [7]. При отсутствии объекта 22 по измеренным проекциям векторов магнитной индукции датчиками 1 и 2 и углов крена, тангажа устройствами 19 и 20 определяют магнитные курсы датчиков 1 и 2 [3]. Поворотными устройствами 17 и 18 ориентируют датчики 1 и 2 по одному курсу. Таким образом, с помощью устройств 13, 15, 17, 19 и 14, 16, 18, 20 осуществляется привязка ортогональных базисов датчиков 1 и 2, что существенно снижает погрешность определения взаимного углового положения датчиков 1 и 2, а следовательно, повышает точность определения параметров, характеризующих намагниченность объекта.
На три входа датчика 1 и на три входа датчика 2 подаются с соответствующих генераторов 9 и 10 переменные напряжения, обеспечивающие перемагничивание магниточувствительных элементов по каждой компоненте датчиков 1 и 2, например феррозондовых датчиков. Перемагничивание магниточувствительных элементов по каждой компоненте датчиков 1 и 2 обеспечивает развязку цепей возбуждения датчиков, сопротивления которых по каждой компоненте изменяются нелинейно [5]. В результате перемагничивания магниточувствительных элементов датчиков 1 и 2 на трех выходах каждого из датчиков появляются три ЭДС второй гармоники, каждая из которых пропорциональна проекции вектора магнитной индукции на соответствующую магнитную ось датчиков 1 и 2. Выходные сигналы с датчиков 1 и 2 усиливаются и детектируются в соответствующих блоках 3-5 и 6-8. Для детектирования сигналов на вторые входы блоков 3-5 подается переменное напряжение с генератора 9, а на вторые входы блоков 6-8 подается переменное напряжение с генератора 10. С вторых выходов А1-А3 блоков 3-5 подаются продетектированные сигналы на соответствующие входы датчика 1, а с вторых выходов Е1-Е3 блоков 6-8 подаются продетектированные сигналы на соответствующие входы датчика 2, обеспечивающие отрицательную обратную связь по измеряемым сигналам [5]. На входы блока 11 поступают сигналы с выходов блоков 3-5 и 6-8, пропорциональные проекциям векторов магнитной индукции, постоянные выходные сигналы с устройств 19 и 20, пропорциональные углам крена, тангажа датчика 1 и углам крена, тангажа датчика 2. По измеренным магнитному курсу, углам крена и тангажа каждого из датчиков 1 и 2 приводят проекции векторов магнитной индукции, измеренные датчиком 2, к базовым осям датчика 1, которые соориентированы коллинеарно опорной геомагнитной системе координат OXYZ.
Датчик 2 удален от объекта 22 на расстояние, в несколько раз превышающее расстояние датчика 1 до объекта 22, поэтому магнитным полем объекта в месте размещения датчика 2 можно пренебречь. При наличии объекта 22 в первый момент времени осуществляют измерение проекций вектора магнитной индукции Bx1, Вy1, Вz1 датчиком 1 и проекции вектора магнитной индукции Вхт1, Вут1, Вzт1 датчиком 2. Каждое из значений Вx1, Вy1, Вz1 является суммой проекций индукции от индуктивной, жесткой намагниченности объекта 22 и геомагнитного поля, которое в зависимости от географической широты изменяется в пределах от 33000 нТл до 66000 нТл [8]. Проекции Вхт1, Вут1, Вzт1 являются проекциями индукции внешнего магнитного поля (геомагнитного поля) на оси датчика 2. Каждая из этих проекций является суммой индукции постоянного и переменного (вариационного) магнитного поля Земли. От стабилизатора токов 21 идут токи в обмотки компенсации датчика 1 [5], воспроизводящие в объеме магниточувствительного элемента датчика 1 составляющие вектора магнитной индукции Вх1, Ву1, Вz1 с обратной полярностью. От стабилизатора токов 21 идут токи в обмотки компенсации датчика 2, воспроизводящие в объеме магниточувствительного элемента датчика 2 составляющие вектора магнитной индукции Вхт1, Вут1, Вzт1 с обратной полярностью. Компенсация сильных магнитных полей в объемах магниточувствительных элементов датчиков 1 и 2 обеспечивает возможность измерения этими датчиками слабых магнитных полей, соответствующих вариациям геомагнитного поля с абсолютной погрешностью воспроизведения магнитных полей в объемах магниточувствительных элементов датчиков 1 и 2. Затем осуществляют одновременное измерение проекций векторов магнитной индукции датчиками 1 и 2, по крайней мере, для второго, третьего и четвертого моментов времени. Из измеренных проекций векторов магнитной индукции датчиками 1 и 2, начиная со второго момента времени, выбирают проекции векторов магнитной индукции для тех трех моментов времени, не считая первого, для которых векторы магнитной индукции, измеренные датчиком 2, будут независимы. По измеренным и выбранным проекциям векторов четырех магнитной индукции датчиками 1 и 2 для четырех моментов времени определяют параметры Пуассона и проекции векторов магнитной индукции от жесткой намагниченности объекта 22 из следующей системы уравнений:

Таким образом, в предлагаемом техническом решении определение параметров, характеризующих намагниченность объекта, осуществляется по измеренным проекциям векторов магнитной индукции вариаций геомагнитного поля, которые по сравнению с аналогом и прототипом являются не магнитными помехами, а полезными сигналами. Определение параметров, характеризующих намагниченность объекта, по вариациям геомагнитного поля обеспечивает решение поставленной задачи при отсутствии изменения и измерения углового положения как объекта, так и датчиков, что уменьшает погрешность определения параметров, характеризующих намагниченность объекта, от погрешностей измерений угловых положений объекта и датчиков.
В предлагаемом техническом решении датчики 1 и 2, блоки 3-8, генераторы 9 и 10 и стабилизатор токов 21 могут быть выполнены как и в устройстве для измерения параметров магнитного поля [5]. Углоизмерительными устройствами 19 и 20 могут быть акселерометры типа ADXL202E. В качестве регистрирующего блока 11 и устройства обработки информации 12 можно использовать преобразователь измерительный многоканальный ПИМ-1 (сертификат №15660, Госстандарт России). Каждое из регулировочных устройств 13 и 14 может быть выполнено аналогично, как и у теодолита, например, Т2 в виде треножника и трех подъемных винтов, а каждым из поворотных устройств 17 и 18 может быть установка, аналогичная установке для поверки инклинометров УПИ-2 [9].
Литература
1. Лысенко А.П. Теория и методы компенсации магнитных помех // Геофизическое приборостроение. Л.: Изд-во Мингеологии и охраны недр СССР. ОКБ. 1960. Вып.7. С.44-58.
2. Резник Э.Е., Канторович В.Д. Некоторые вопросы компенсации магнитных полей самолета // Геофизическое приборостроение. Л.: "Недра". 1964. Вып.10. С.26-38.
3. Смирнов Б.М. Определение индукции геомагнитного поля на фоне магнитных помех подвижного объекта // М.: Измерительная техника. 2003. №11. С.52-58.
4. Пат. РФ №2096818, G 05 D 1/08. Способ определения коэффициентов Пуассона подвижного объекта и устройство для его осуществления // Б.М.Смирнов. Открытия. Изобретения. 1997. БИ №32.
5. Афанасьев Ю.B. Феррозондовые приборы. Л.: "Энергоатомиздат". 1986. 188 с.
6. Миловзоров Г.В. Моделирование и исследование инструментальных погрешностей трехкомпонентного акселерометрического преобразователя наклона // М.: Измерительная техника. 1996. №10. С.22-26.
7. Смирнов Б.М. Привязка осей трехкомпонентного магнитометрического датчика к осям навигационной системы ферромагнитного подвижного объекта // М.: Метрология. 2003. №12. С.22-34.
8. Логачев А.А., Захаров В.П. Магниторазведка. Л.: "Недра". 1979. 351 с.
9. Алимбеков Р.И., Баймуратов Ю.Г., Зайко А.И., Сорокин А.А. Установка для поверки инклинометров УПИ-2 // М.: Измерительная техника. 2002. №11. С.23.
Изобретение относится к измерительной технике и может быть использовано в магниторазведке, магнитной навигации и т.п. Способ заключается в измерении проекций векторов магнитной индукции в двух точках пространства, выбранных на соответствующих расстояниях от объекта, в различные моменты времени. Способ включает воспроизведение в каждой из упомянутых точек пространства векторов магнитной индукции, равных по величине и противоположно направленных первоначально измеренным. По результатам измерений определяют параметры, характеризующие намагниченность объекта. Устройство содержит два трехкомпонентных магнитометрических датчика, шесть усилительно-преобразовательных блоков, два генератора переменных напряжений, регистрирующий блок, устройство обработки информации, два углоизмерительных устройства, два регулировочных устройства, два немагнитных основания, два поворотных устройства, стабилизатор токов. Такое техническое решение позволяет повысить точность измерений благодаря использованию вариаций геомагнитного поля, считавшихся ранее помехами, в качестве информативных сигналов. 2 н.п. ф-лы, 1 ил.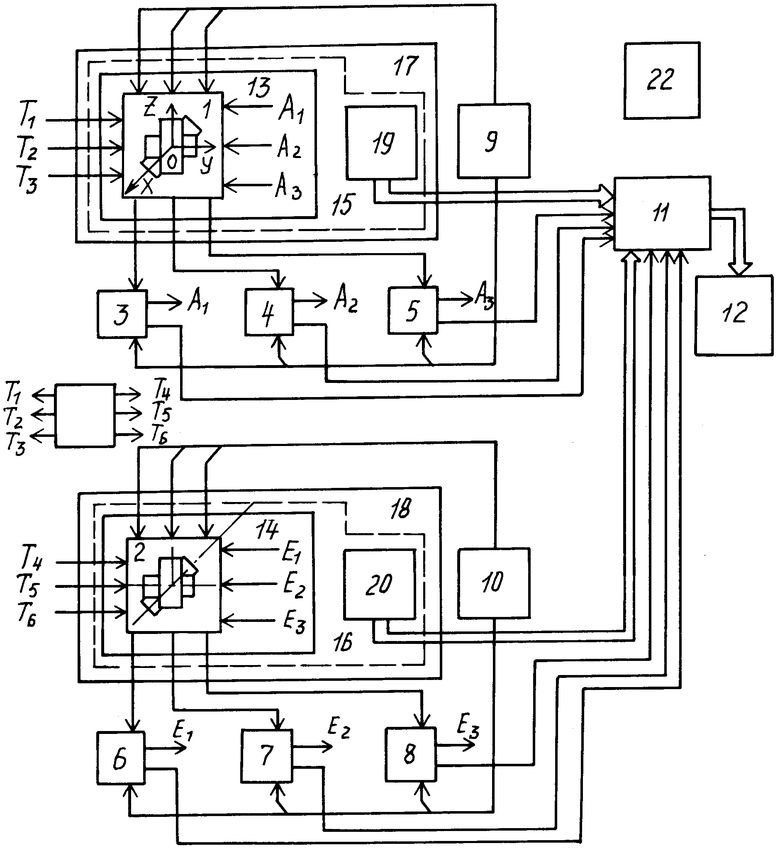






где






Bхт(i+1),1, Bут(i+1),1, Bzт(i+1),1 - проекции векторов магнитной индукции во второй точке пространства для (i+1) моментов времени при направляющих косинусах 
 i=1, 2, ...;
i=1, 2, ...;
a, b, c, d, e, f g, h, k и Вxp, Вур, Вzp - параметры Пуассона и проекции вектора магнитной индукции от жесткой намагниченности объекта, характеризующие намагниченность объекта;
Вx1 Вy1, Вz1 и Вхт1, Вут1, Вzт1 - проекции вектора магнитной индукции и вектора индукции внешнего магнитного поля, измеренные соответственно в первой и второй точках пространства в первый момент времени;
Вx(i+1), By(i+1), Bz(i+1) - проекции векторов магнитной индукции, измеренные в первой точке пространства для (i+1) моментов времени;
(l1, m1, n1), (l2, m2,n2), (l3, m3, n3) - направляющие косинусы осей, в направлениях которых измеряют составляющие векторов магнитной индукции в первой точке пространства в выбранной опорной системе координат во второй точке пространства,
при этом измеряют все проекции векторов магнитной индукции в первой и второй точках пространства при постоянном положении объекта в упомянутой опорной системе координат.
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ПУАССОНА ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2096818C1 |
| Способ измерения проекций вектора магнитной индукции с подвижной платформы и устройство для его осуществления | 1989 |
|
SU1670637A1 |
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| Способ определения магнитного момента дипольного источника поля и координат точки приложения этого момента | 1982 |
|
SU1064251A1 |
| Градиентометр | 1978 |
|
SU789949A1 |
| СМИРНОВ Б.М | |||
| Привязка осей трехкомпонентного магнитометрического датчика к осям навигационной системы ферромагнитного подвижного объекта | |||
| Метрология | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| ЛОГАЧЕВ А.А | |||
| и др | |||
| Магниторазведка | |||
| - Л.: Недра, 1979, с.85-94. | |||

