Изобретение относится к измерительной технике и предназначено для измерения ударного ускорения.
Известно устройство для измерения ударных ускорений (см., например, заявку Великобритании №1366916, кл. Н 01 Н 35/14, 1974), в котором ускорение воспринимается чувствительным инерционным элементом в виде шарика, расположенного в конусе. При воздействии ускорения шарик развивает усилие, перемещается и вызывает срабатывание устройства, например замыкание электрической цепи.
Известное устройство имеет ограниченные функциональные возможности, т.к. шарик, расположенный в конусе, реагирует на ускорение, направленное только со стороны конуса.
Известно устройство (см., например, заявку Франции №2620855, кл. Н 01 Н 35/14, 1989), позволяющее измерять ускорения, направленные в любой плоскости. Чувствительным элементом в нем также являются шарики, расположенные в конусах и взаимодействующие с пружиной, регулирующей ускорение, при котором устройство срабатывает. Расположение шарика в коническом седле позволяет производить с разной степенью точности измерение ударных ускорений, действующих в зоне, охватывающей полусферу.
Однако взаимодействие инерционной массы с пружиной контактной системы, обладающей массой и жесткостью, увеличивает время срабатывания устройства. Кроме того, в случае необходимости измерения ударных ускорений, действующих в любых направлениях, необходимо устанавливать, по крайней мере, два таких датчика.
За прототип выбран датчик ударных ускорений (патент РФ №2164692, кл. G 01 Р 15/04, 1998), содержащий закрепленные в корпусе два конических седла с размещенными в них инерционными элементами (шариками), расположенными на рычаге по разные стороны от центра вращения, концы рычага выполнены из магнитомягкого материала и размещены между магнитом и его полюсным наконечником. Магнитная система обеспечивает релейное срабатывание датчика при определенном значении ударного ускорения.
Преимущество прототипа заключается в том, что рычаг расположен в корпусе с возможностью поворота в подшипниках на центральной оси, каждый конец рычага контактирует с инерционным элементом (шариком), причем каждый шарик размещен в конусе, закрепленном в корпусе симметрично центральной оси по разные стороны от рычага. Точки контактирования шарика и рычага расположены в одной главной плоскости, проходящей через центральную ось.
Угол конуса выбран таким, что при воздействии ускорения в любом направлении шарики создают на рычаге момент сил, пропорциональный величине ускорения, причем этот момент сил одинаков в пределах допустимой погрешности независимо от направления вектора ускорения.
Момент сил от воздействия ускорения сравнивается с эталонным моментом сил от магнитной системы и при достижении заданного значения ускорения (уставки) происходит перемещение рычага из одного положения в другое и, соответственно, срабатывание исполнительного механизма.
Недостатком прототипа является то, что шарики при своем перемещении не всегда катятся, а иногда скользят по образующим конуса.
При этом возникающая сила трения создает момент сил на рычаге, что определяет значительную долю погрешности срабатывания датчика.
Значительного уменьшения плеча приложения силы трения (расстояния между точкой контактирования инерционного элемента с рычагом и центральной осью - подвеской рычага) нельзя достигнуть из конструктивных соображений, связанных с размерами шаров.
Погрешность от трения определяется работой сил трения на элементарном угловом перемещении рычага "Δα" и составляет:
Δтр=ma·f·l·dα,
где m - масса шарика,
α - ускорение,
f - трение скольжения,
l - плечо приложения силы "ma".
Как показывает расчет, проведенный при проектировании, дополнительная погрешность от сил трения в прототипе при коэффициенте трения f=0,15 может достигать значения 22,5% (S=1,5·f·100%).
Предложенное изобретение направлено на решение задачи уменьшения погрешности от сил трения.
Это достигается тем, что в датчике ударных ускорений, содержащем корпус, расположенный в нем с возможностью поворота на центральной оси и скрепленный с ней рычаг, размещенные симметрично центральной оси и по разные стороны от рычага инерционные элементы, точки контактирования которых с рычагом расположены в одной главной плоскости, проходящей через центральную ось, закрепленный в корпусе постоянный магнит с полюсами из магнитомягкого материала, якорь из того же материала, расположенный с возможностью перемещения из одного устойчивого положения в другое в полюсах постоянного магнита, и закрепленную на центральной оси тягу исполнительного механизма, каждый инерционный элемент выполнен в виде, по крайней мере, трех инерционных грузов, отстоящих на равных расстояниях друг от друга с возможностью поворота на дополнительной оси, диаметр которой на порядок меньше расстояния между точкой контактирования инерционного груза с рычагом и центральной осью, причем дополнительные оси расположены на главной плоскости, а центр массы инерционного груза - в плоскости, наклоненной к главной под углом 54-59°, при этом якорь закреплен симметрично на центральной оси.
При таком выполнении датчика уменьшение погрешности от сил трения достигается тем, что под воздействием ударного ускорения α на каждый инерционный элемент воздействует сила Fa=mа. Эта сила определяет момент сил относительно дополнительной оси, вокруг которой поворачивается инерционный элемент. Диаметр дополнительной оси конструктивно может быть минимален, а погрешность от трения будет на порядок меньше, чем в прототипе. Это объясняется тем, что сила трения в обоих случаях примерно одинакова, т.к. определяется силой давления на трущуюся поверхность (суммарно равна mа), умноженной на коэффициент трения f. Однако работа силы трения в предложенном датчике меньше, т.к. перемещение трущихся поверхностей в предложенном датчике меньше на порядок.
При одинаковом угле поворота рычага сила трения в предложенном датчике приложена к поверхности дополнительной оси, а в прототипе - к поверхности конуса.
При этом перемещение при одинаковом угле будет меньше в  раз,
раз,
где d - диаметр дополнительной оси,
l - расстояние между точкой контактирования инерционного груза и центральной осью.
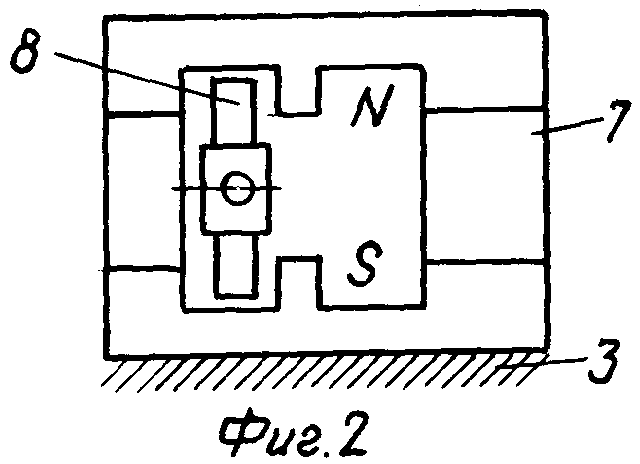
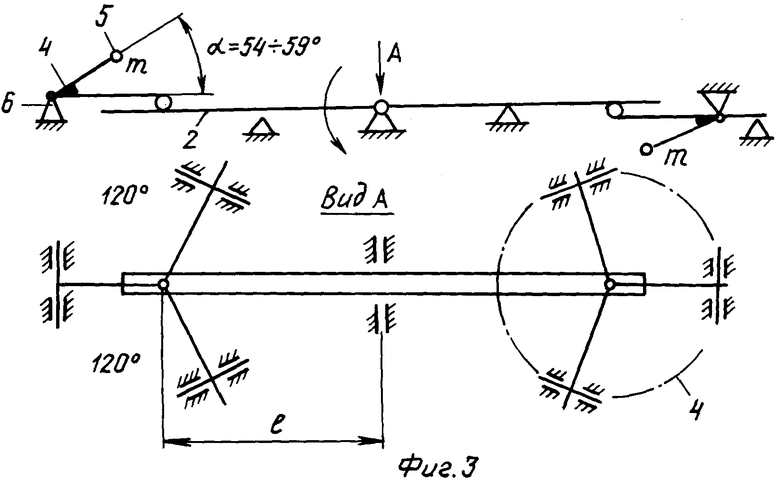
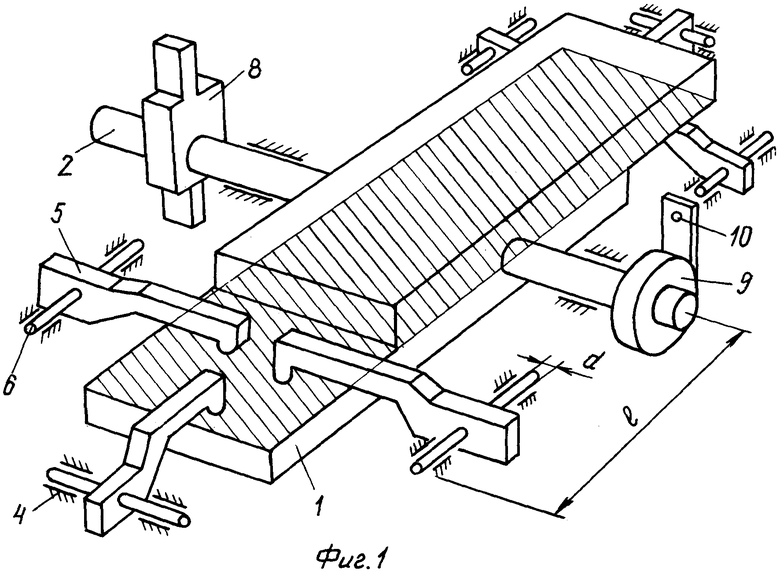
Изобретение поясняется чертежом, где на фиг.1 представлена конструкция датчика ударных ускорений, на фиг.2 - конструкция магнитной системы, а на фиг.3 - кинематическая схема датчика ударных ускорений.
Датчик ударных ускорений (см. фиг.1) содержит рычаг 1, установленный на центральной оси 2, закрепленной в корпусе 3, у концов рычага 1 по разные стороны от него симметрично центральной оси размещены инерционные элементы 4, точки контактирования которых с рычагом 1 расположены в одной главной плоскости (на чертеже заштрихована), проходящей через центральную ось. Каждый инерционный элемент 4 выполнен в виде нескольких инерционных грузов 5, установленных с возможностью поворота на дополнительной оси 6, расположенной в главной плоскости, инерционные грузы 5 отстоят друг от друга на равных расстояниях; закрепленный в корпусе 3 постоянный магнит 7 (на фиг.1 не обозначен), с полюсами из магнитомягкого материала, установленный на центральной оси 2 якорь 8 из того же материала, жестко закрепленную на центральной оси 2 тягу 9 исполнительного механизма 10, например, в виде индикатора или контактов электрической цепи.
Постоянный магнит 7 (см. фиг.2) закреплен в корпусе 3, в пазах магнитных полюсов из магнитомягкого материала магнита 7 размещен якорь 8 из того же материала с возможностью перемещения в них из одного устойчивого положения в другое.
Инерционные грузы 5 (см. фиг.3) взаимодействуют с поверхностью рычага 1 и установлены на соответствующих осях 6, центр массы m инерционного груза расположен в плоскости, наклоненной к главной плоскости под углом 54-59°.
Работает датчик ударных ускорений следующим образом.
Под воздействием ударного ускорения инерционные грузы 5 развивают силы, воздействующие через точки контактирования на главную плоскость рычага 1, которая проходит по длине рычага 1 через центральную ось 2.
Инерционным силам противодействуют силы, развиваемые притяжением якоря 8 к магнитным полюсам постоянного магнита 7. При этом момент сил от воздействия ускорения сравнивается с эталонным моментом сил от магнитной системы.
После того, как инерционные силы преодолевают силы магнитного притяжения якоря 8 (эталонный момент сил) к магнитным полюсам, инерционные грузы 5 поворачиваются на дополнительных осях 6, рычаг 1 поворачивается, разворачивая главную ось 2 и тягу 9, перемещение которой приводит к срабатыванию исполнительного механизма 10. Исполнительный механизм замыкает электрическую цепь либо вызывает отклонение стрелки индикатора.
Как следует из расчета, проведенного при проектировании, расположение центра масс инерционных грузов в плоскости, наклоненной к главной плоскости под углом 54-59°, обеспечивает минимальную методическую и суммарную погрешность датчика ударных ускорений, т.е. момент сил от воздействующих ускорений одинаков в пределах допустимой погрешности независимо от направления вектора ускорения.
Расчеты показывают, что в предложенном датчике дополнительная погрешность от уменьшения сил трения снижена на 7%, при этом суммарная относительная погрешность с учетом методической погрешности уменьшается примерно на 2% при воздействии ускорений, действующих в любом направлении.
Дополнительным преимуществом предложенного датчика является уменьшение погрешности от симметричного расположения якоря на центральной оси.
Так, если в прототипе при смещениях центральной оси в подшипниках из-за радиальных зазоров (≈10 мкм) возникает изменение магнитных зазоров между якорем и полюсами, что приводит к нестабильности эталонного момента (≈10%), то в предложенной конструкции эталонный момент не изменяется, т.к. увеличение магнитного зазора с одной стороны якоря компенсируется равным ему уменьшением зазора с другой стороны якоря. Практически это приводит к уменьшению силы притяжения с одной стороны якоря, что компенсируется увеличением силы притяжения с другой стороны, т.е. эталонная сила (или момент сил) остается постоянной, и точность срабатывания датчика увеличивается.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК УДАРНЫХ УСКОРЕНИЙ | 2008 |
|
RU2364874C1 |
| ДАТЧИК УДАРНЫХ УСКОРЕНИЙ | 2023 |
|
RU2806247C1 |
| ДАТЧИК УСКОРЕНИЯ | 1999 |
|
RU2192645C2 |
| ДАТЧИК УДАРНЫХ УСКОРЕНИЙ | 1998 |
|
RU2164692C2 |
| ИНЕРЦИОННЫЙ ВКЛЮЧАТЕЛЬ | 2013 |
|
RU2562057C2 |
| ИНЕРЦИОННЫЙ ВКЛЮЧАТЕЛЬ | 2018 |
|
RU2700169C2 |
| ДАТЧИК ОТРЫВА | 1995 |
|
RU2091892C1 |
| ИНЕРЦИОННЫЙ ВКЛЮЧАТЕЛЬ | 2000 |
|
RU2192683C2 |
| ГРАВИТАЦИОННЫЙ ВАРИОМЕТР | 2010 |
|
RU2438151C1 |
| ИНЕРЦИОННЫЙ ВКЛЮЧАТЕЛЬ | 2000 |
|
RU2193800C2 |
Изобретение относится к измерительной технике и предназначено для измерения ударного ускорения. Датчик ударных ускорений содержит корпус 3, расположенный в нем с возможностью поворота на центральной оси 2 и скрепленный с ней рычаг 1, размещенные симметрично центральной оси и по разные стороны от рычага инерционные элементы 4, точки контактирования которых с рычагом 1 расположены в одной главной плоскости, проходящей через центральную ось 2. Постоянный магнит с полюсами из магнитомягкого материала закреплен в корпусе 3. Якорь 8 из того же материала расположен с возможностью перемещения из одного устойчивого положения в другое в полюсах постоянного магнита. Тяга 9 исполнительного механизма закреплена на центральной оси 2. Каждый инерционный элемент 4 выполнен в виде, по крайней мере, трех инерционных грузов 5, отстоящих на равных расстояниях друг от друга с возможностью поворота на дополнительной оси 6, диаметр которой на порядок меньше расстояния между точкой контактирования инерционного груза 5 с рычагом 1 и центральной осью 2, причем дополнительные оси 6 расположены на главной плоскости, а центр массы инерционного груза - в плоскости, наклоненной к главной под углом 54-59°, при этом якорь закреплен симметрично на центральной оси. Техническим результатом является уменьшение погрешности, обусловленной силами трения. 3 ил.
Датчик ударных ускорений, содержащий корпус, расположенный в нем с возможностью поворота на центральной оси и скрепленный с ней рычаг, размещенные симметрично центральной оси и по разные стороны от рычага инерционные элементы, точки контактирования которых с рычагом расположены в одной главной плоскости, проходящей через центральную ось, закрепленный в корпусе постоянный магнит с полюсами из магнитомягкого материала, якорь из того же материала, расположенный с возможностью перемещения из одного устойчивого положения в другое в полюсах постоянного магнита, и закрепленную на центральной оси тягу исполнительного механизма, отличающийся тем, что в нем каждый инерционный элемент выполнен в виде, по крайней мере, трех инерционных грузов, отстоящих на равных расстояниях друг от друга, каждый с возможностью поворота на соответствующей дополнительной оси, диаметр которой на порядок меньше расстояния между точкой контактирования инерционного груза с рычагом и центральной осью, причем дополнительные оси расположены в главной плоскости, а центр массы инерционного груза - в плоскости, наклоненной к главной под углом 54-59°, при этом якорь закреплен симметрично на центральной оси.
| ДАТЧИК УДАРНЫХ УСКОРЕНИЙ | 1998 |
|
RU2164692C2 |
| Фармацевтическая композиция для профилактики и лечения нарушений сна | 2016 |
|
RU2620855C1 |
| Устройство для испытания материалов на износ при циклическом изменении напряженного состояния | 1986 |
|
SU1366916A2 |
| ДАТЧИК ПЕРЕГРУЗОК | 1996 |
|
RU2117299C1 |
| Устройство для регистрации порогового ускорения | 1980 |
|
SU964548A1 |
| US 4378475 А, 29.03.1983 | |||
| УСТРОЙСТВО ДЛЯ ВЫДАЧИ КАРТ | 0 |
|
SU391582A1 |

