Изобретение относится к измерительной технике и предназначено для измерения порогового значения ударного ускорения.
Известно устройство для измерения ударных ускорений, в котором ускорение воспринимается тремя инерционными элементами. При воздействии ускорения инерционные элементы развивают усилие, поворачиваются на дополнительных осях и вызывают срабатывание устройства, например, замыкание электрической цепи. Патент РФ №2257590, МПК G01P 15/04, 27.07.2005.
Для достижения необходимой точности срабатывания известное устройство должно иметь по крайней мере по три несбалансированных рычага по разные стороны оси, т.е. суммарно шесть рычагов и, соответственно, шесть дополнительных осей, что приводит к снижению точности срабатывания из-за повышения трения в опорах дополнительных осей. Кроме того, наличие дополнительных осей в таком количестве усложняет конструкцию и увеличивает габариты датчика.
Известно устройство для измерения ударных ускорений, в котором ускорение воспринимается тремя несбалансированными рычагами, представляющими собой инерционные элементы с центром массы. При воздействии ускорения несбалансированные рычаги развивают усилие, поворачиваются на дополнительных осях и вызывают срабатывание устройства, например, замыкание электрической цепи. Патент РФ №2364874, МПК G01P 15/04, 20.08.2009.
Недостатками известного устройства также являются дополнительные оси, что также приводит к снижению точности срабатывания из-за повышения трения в опорах дополнительных осей, хоть и в меньшей мере, и помимо этого имеет сложную конструкцию, что затрудняет процесс изготовления и настройки датчика.
Известен датчик ударных ускорений, содержащий закрепленные в корпусе два конических седла с размещенными в них инерционными элементами (шариками), расположенными на рычаге по разные стороны от центра вращения, концы рычага выполнены из магнитомягкого материала и размещены между магнитом и его полюсным наконечником. Магнитная система обеспечивает релейное срабатывание датчика при определенном значении ударного ускорения. Патент РФ №2164692, МПК G01P 15/04, 27.03.2001. Данное техническое решение принято в качестве прототипа.
Прототип работает следующим образом: рычаг расположен в корпусе с возможностью поворота в подшипниках на центральной оси, каждый конец рычага контактирует с инерционным элементом (шариком), причем каждый шарик размещен в конусе, закрепленном в корпусе симметрично центральной оси по разные стороны от рычага. Точки контактирования шарика и рычага расположены в одной главной плоскости, проходящей через центральную ось.
Угол конуса выбран таким, что при воздействии ускорения в любом направлении шарики создают на рычаге момент сил, пропорциональный величине ускорения, причем этот момент сил одинаков в пределах допустимой погрешности независимо от направления вектора ускорения.
Момент сил воздействия ускорения сравнивается с эталонным моментом сил от магнитной системы и при достижении заданного значения ускорения (уставки) происходит перемещение рычага из одного положения в другое и, соответственно, срабатывание исполнительного механизма.
Недостатками прототипа являются:
- высокая погрешность срабатывания;
- срабатывание датчика от ударных воздействий малой длительности;
- датчик одноразового действия (отсутствует возможность возвращения датчика в исходное состояние после срабатывания).
Предложенное изобретение направлено на решение задач повышения точности срабатывания датчика ударных ускорений, исключения срабатывания датчика от ударных воздействий малой длительности за счет введения демпфирования ударных ускорений малой длительности, а также обеспечения возможности приведения датчика в исходное состояние.
Техническим результатом является повышение точности датчика ударного; исключение воздействия ударов, обладающих низкой энергией, но имеющих амплитуду удара, соответствующую порогу срабатывания датчика; возвращение датчика в исходное состояние после срабатывания.
Технический результат достигается тем, что датчик ударных ускорений содержит размещенные в корпусе жестко не связанные между собой узел измерения, чувствительный к ударному ускорению, и узел эталонной силы; узел измерения представляет собой крестообразный рычаг, на котором симметрично центральной оси по разные стороны от рычага размещены четыре инерционных элемента (шарика), помещенных в конические седла с углом 80-83°; узел эталонной силы представляет собой поляризованное реле, определяющее порог срабатывания и позволяющее обеспечить возвращение датчика в исходное состояние в случае его срабатывания; при этом передача усилия от узла измерений к узлу эталонной силы осуществляется через механический фильтр низких частот, в который входит демпфирующий элемент, состоящий из двух плоских пружин, и зазора в цепи передачи усилия от узла измерения к узлу эталонной силы и обеспечивающий исключение влияния на срабатывание датчика ударных воздействий малой длительности.
Изобретение поясняется чертежами, где:
1 - крестообразный рычаг;
2 - центральная ось;
3 - корпус (на фиг. 1, 3, 6 показаны элементы корпуса - упоры);
4 - инерционный элемент;
5 - втулка;
6 - постоянный магнит;
7 - электромагнит;
8 - магнитный полюс (полюсный наконечник);
9 - якорь;
10 - пластинчатая пружина;
11 - диск;
12 - зазор.
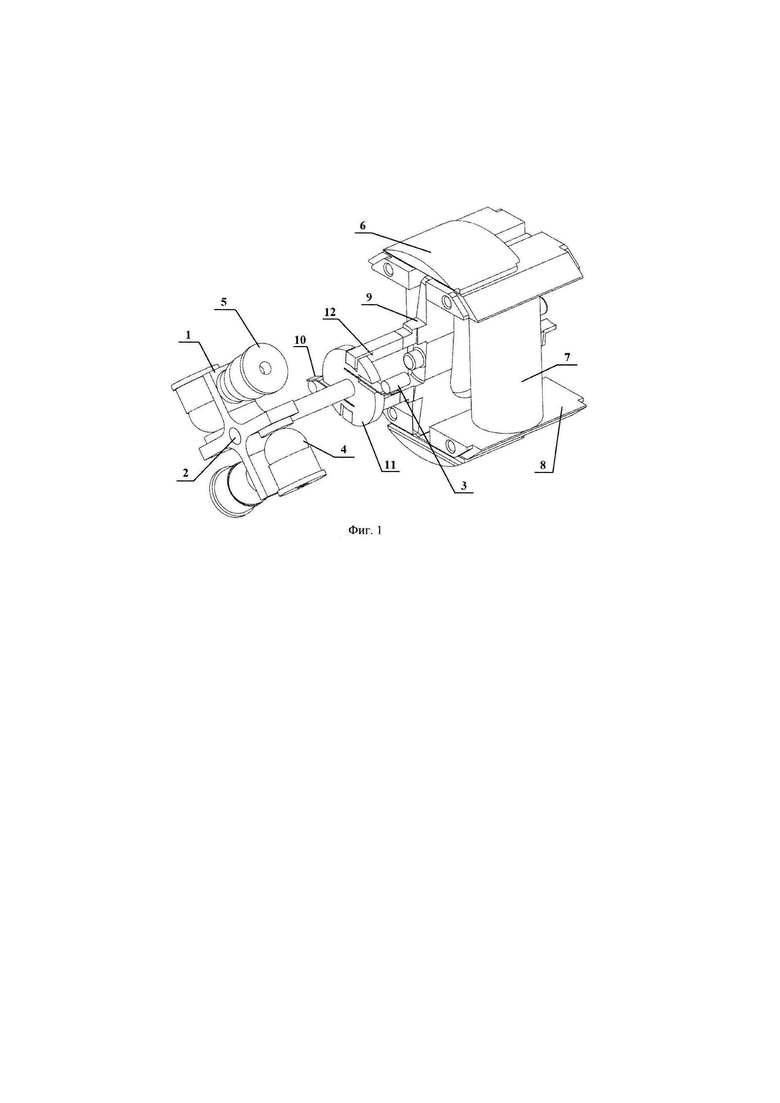
На фиг. 1 представлена схема датчика ударных ускорений.
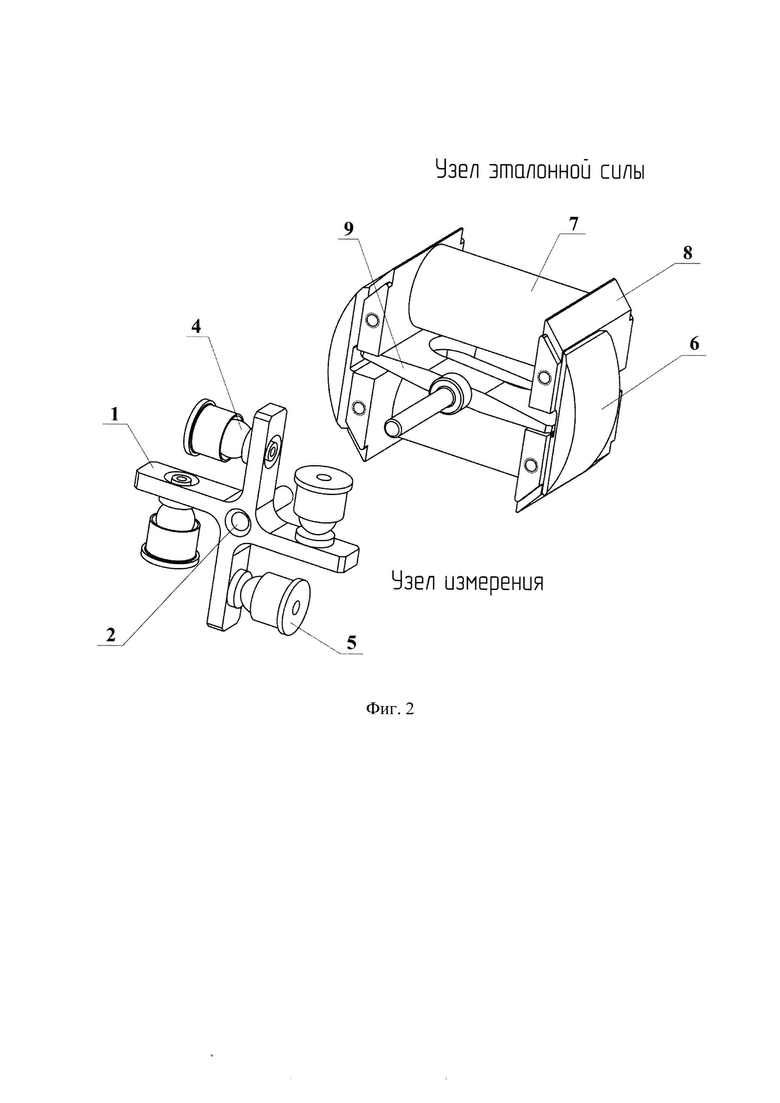
На фиг. 2 представлена конструкция измерительного узла и узла эталонной силы датчика ударных ускорений.
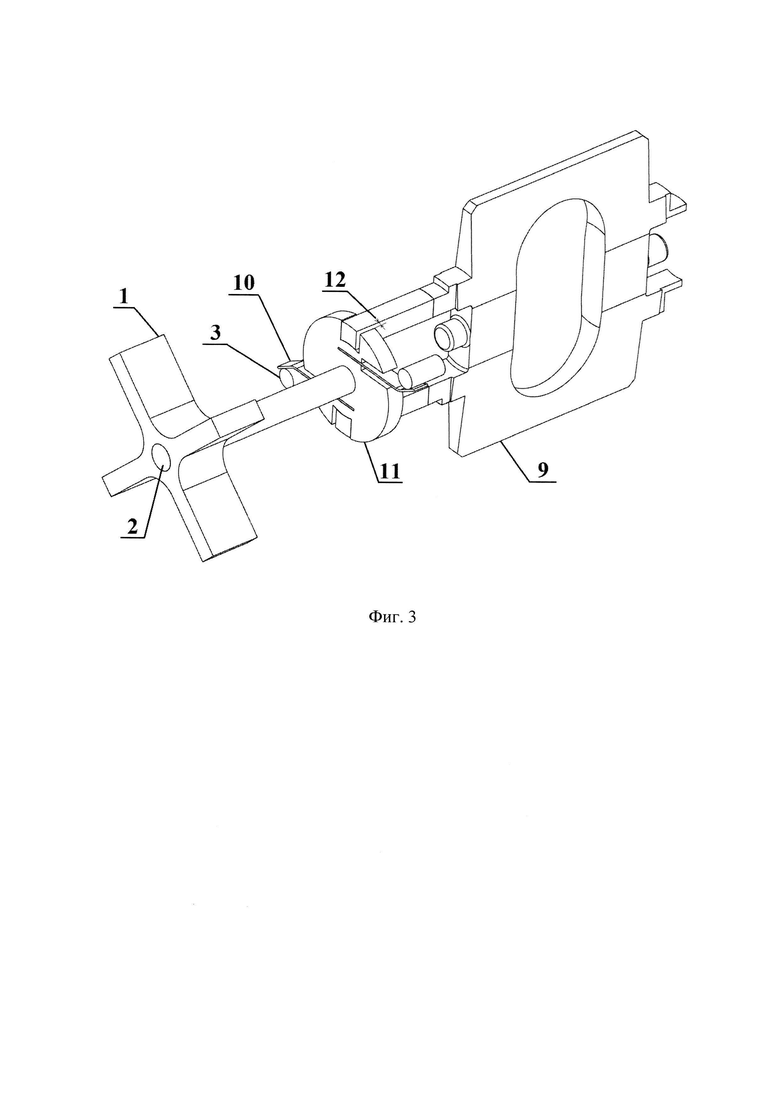
На фиг. 3 представлена конструкция демпфирующего элемента между узлом измерения и узлом эталонной силы.
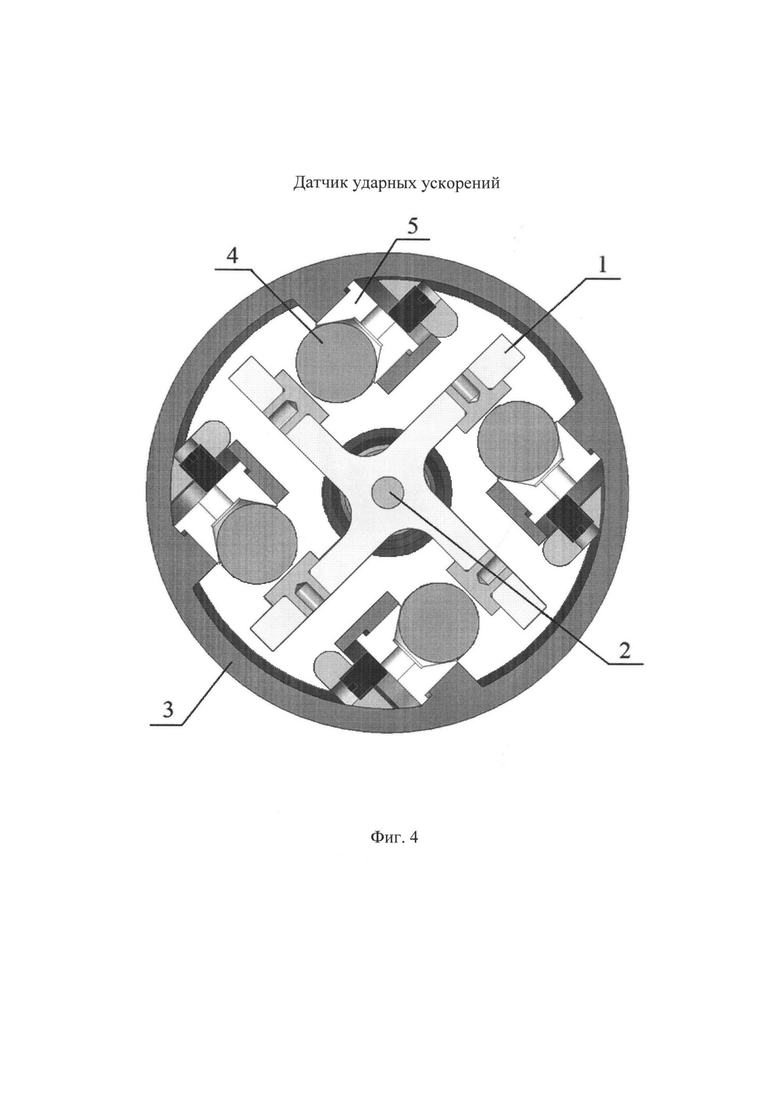
На фиг. 4 представлена конструкция измерительного узла датчика ударных ускорений.
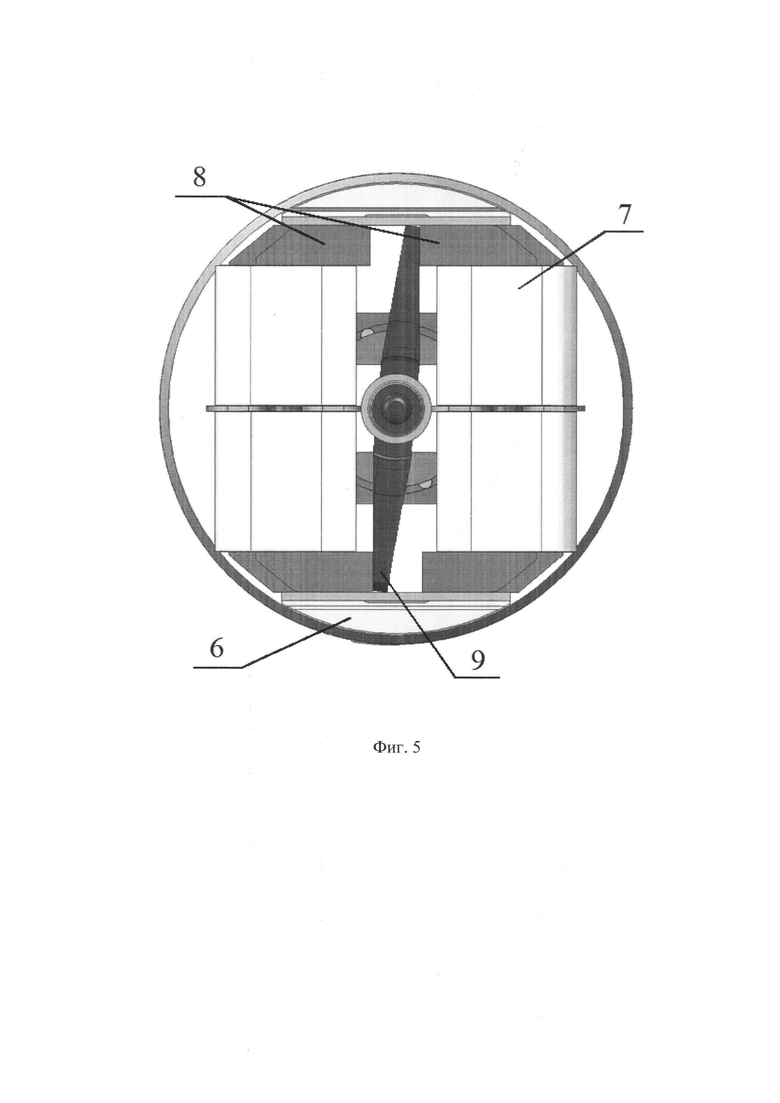
На фиг. 5 представлена конструкция узла эталонной силы датчика ударных ускорений.
На фиг. 6 представлена конструкция демпфирующего элемента датчика ударных ускорений.
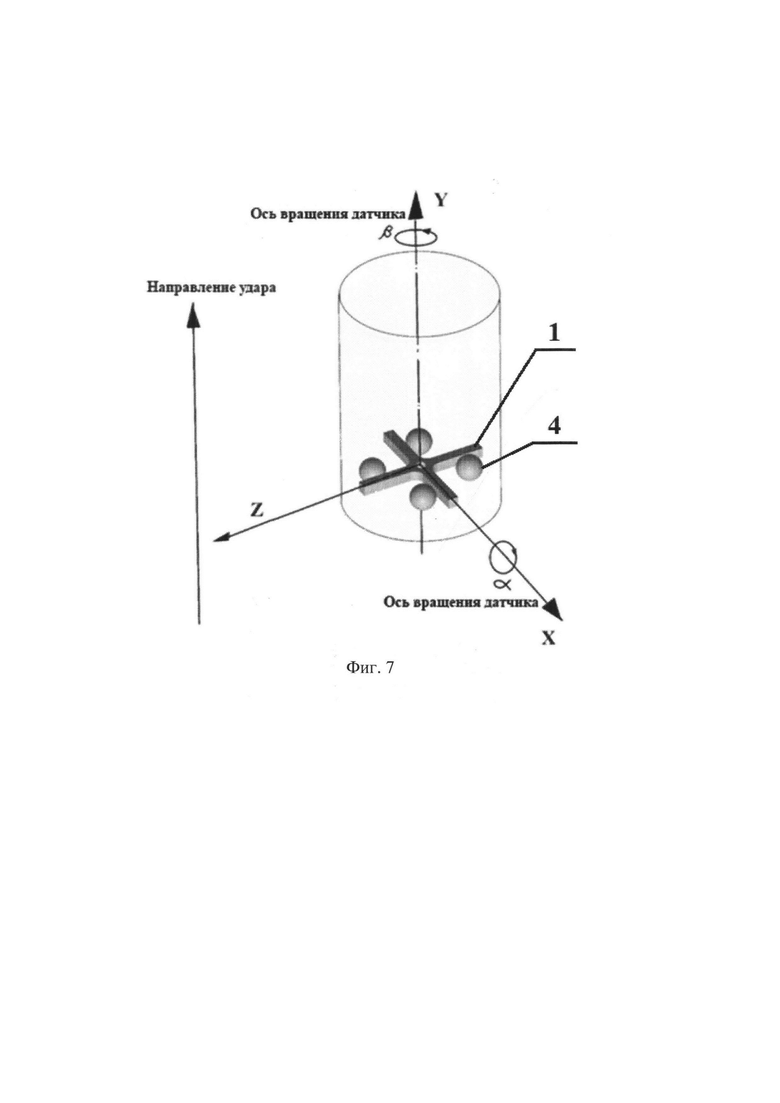
На фиг. 7 представлено направление воздействия инерционной силы при испытаниях датчика.
Ударный датчик (фиг. 1) содержит размещенные в корпусе 3 узел измерения, узел эталонной силы и демпфирующий элемент.
Узел измерения (фиг. 2, 4) содержит крестообразный рычаг 1, установленный на центральной оси 2, соединенной жестко с диском 11, внутри которого установлены демпфирующие элементы в виде двух пластинчатых пружин 10, второй конец которых соединен с корпусом 3. На одинаковом расстоянии от оси вращения рычага размещены четыре инерционных элемента 4, выполненные в виде шариков и выполняющих роль чувствительных элементов, предназначенных для преобразования ударного ускорения, действующего на датчик, в силу, поворачивающую крестообразный рычаг 1. Каждый шарик расположен во втулке 5, имеющей форму конуса с углом в пределах 80-83°; указанный угол обеспечивает минимальное отклонение срабатывания датчика при изменении направления удара, т.е. минимальное отклонение диаграммы направленности от круговой, таким образом, ударное ускорение, воздействующее на шарики, создает относительно центральной оси 2 крестообразного рычага 1 одинаковый момент сил независимо от направления инерционной силы. Соседние втулки располагаются под углом 90° по отношению друг к другу и равноудалены от оси вращения крестообразного рычага 1.
Узел эталонной силы (фиг. 3, 5) представляет собой поляризованное реле и содержит магнитную систему из постоянного магнита (SmCo) 6, электромагнита 7, магнитных полюсов (полюсных наконечников) 8 и якоря 9, вращающегося соосно центральной оси 2.
Между узлом измерения и узлом эталонной силы установлен фильтр нижних частот (фиг. 6), в состав которого входит демпфирующий элемент из двух пластинчатых пружин 10; один конец каждой пружины соединен с корпусом 3, а второй - с диском 11, жестко закрепленным на крестообразном рычаге 1 через центральную ось 2. Между диском 11 и якорем 9 узла эталонной силы выставлен зазор 12.
Работает датчик ударных ускорений следующим образом.
При действии ударного ускорения инерционные элементы 4, входящие в узел измерения, развивают усилие, воздействующее на крестообразный рычаг 1, который в свою очередь вызывает вращение центральной оси 2 и связанного с ней диска 11. При повороте диска 11 момент силы от узла измерения передается к узлу эталонной силы.
Построение измерительного узла на основе крестообразного рычага 1 и четырех инерционных элементах 4 позволяет значительно уменьшить погрешность срабатывания при изменении направления удара по сравнению с прототипом, в котором измерительный узел построен на рычаге и двух инерционных элементах. Для датчика-прототипа на основе рычага с двумя инерционными массами диаграмма направленности для порога срабатывания представляет правильный шестиугольник. При крестообразном рычаге 1 диаграмма направленности для порога срабатывания получается путем наложения двух диаграмм для горизонтального и вертикального рычагов и имеет форму двенадцатиугольника. Полученный в результате суперпозиции двенадцатиугольник показывает, что крестообразная конструкция рычага 1 обеспечивает минимальное отклонение диаграммы от круговой и, следовательно, позволяет более чем в четыре раза уменьшать погрешности срабатывания при изменении направления вектора удара и тем самым повысить точность датчика ударных ускорений.
Узел эталонной силы, представляющий собой поляризованное реле, определяющее порог срабатывания, обеспечивает два устойчивых положения якоря, соответствующие исходному и сработанному состоянию ударного датчика, и позволяет сделать возможным возвращение датчика в исходное состояние в случае его срабатывания. Моменту силы от измерительного узла противодействуют сила притяжением якоря 9 к полюсам постоянных магнитов 6. Изменение порога срабатывания происходит путем изменения величины намагниченности магнитов 6 (при изготовлении датчика). При воздействии на датчик ударного ускорения в узле измерения возникает момент сил от воздействия шариков на рычаг, который преодолевает момент сил, создаваемый магнитной системой относительно оси.
В том случае, когда амплитуда ускорения превышает порог срабатывания ударного датчика, происходит поворот якоря 9 к диаметрально противоположным полюсам постоянных магнитов 6 и датчик переходит в сработанное состояние. Для возвращения датчика в исходное состояние в случае его срабатывания достаточно подать соответствующие напряжение на обмотку электромагнита 7.
Между измерительным узлом и узлом эталонной силы установлен механический фильтр нижних частот (фиг. 3, 6), включающий:
- зазор 12, препятствующий передаче усилия от узла измерения к узлу эталонной силы;
- демпфирующий элемент, жестко закрепленный на центральной оси 2 узла измерения и включающий диск 11 с закрепленными на нем двумя плоскими пружинами 10; жесткость пружин подобрана так, чтобы энергия внешнего воздействия переходила в энергию сжатия пружины, и если энергии внешнего воздействия достаточно для перехода в жесткую связь внутреннего диска 7 с якорем 9, то воздействие крестового рычага 1 через инерционные элементы 4 узла измерения начинает уже напрямую вращать якорь 9 узла эталонной силы, преодолевая заданное изначально эталонное магнитное усилие.
С помощью зазора 12 исключается влияние ударных воздействий малой длительности: передача перемещения якоря 9 начинается после того, как крестообразный рычаг 1 начнет смещение внутреннего диска 7 и будет преодолен зазор 12 величиной в 1,55 мм (фиг. 3).
С помощью демпфирующего элемента регулируется частота среза фильтра и степени ослабления усилия, передаваемого к узлу эталонной силы.
Также с помощью демпфирующего элемента фильтруются удары, обладающие низкой энергией, но имеющие амплитуду удара, соответствующую порогу срабатывания датчика ударного ускорения. Как было указано выше, жесткость пружин подобрана так, чтобы энергия внешнего воздействия переходила в энергию сжатия пружины. Таким способом отфильтровываются ударные воздействия, при которых датчик ударных ускорений не должен переходить в сработанное состояние, что значительно повышает точность и надежность прибора.
Были проведены испытания ударного датчика, настроенного на срабатывание при 40g, с целью определения:
- погрешности срабатывания датчика при изменении направления вектора удара;
- определения значения ускорения срабатывания датчика при изменении длительности ударных ускорений.
Результаты исследования ударных датчиков на срабатывание в зависимости от изменения направления воздействия инерционной силы в соответствии с фиг. 6, приведены в таблицах 1 и 2, где:
α, β - угол между направлением воздействия инерционной силы и осью ударного датчика, вокруг которой поворачивается рычаг;
Ai - значение порога срабатывания при изменении направления ускорения (угла α, β), воздействующего на прибор;
δi - погрешность срабатывания в зависимости от направления воздействия инерционной силы, вычисленная по формуле


Как видно из данных, приведенных в таблицах 1 и 2, погрешность срабатывания датчика при изменении вектора удара не превышает 5%.
Результаты испытаний при изменении при изменении длительности ударного воздействия приведены в таблице 3, где:
Axi - значение порога срабатывания при изменении длительности ударного воздействия, воздействующего на прибор;
τ - длительности ударного воздействия.
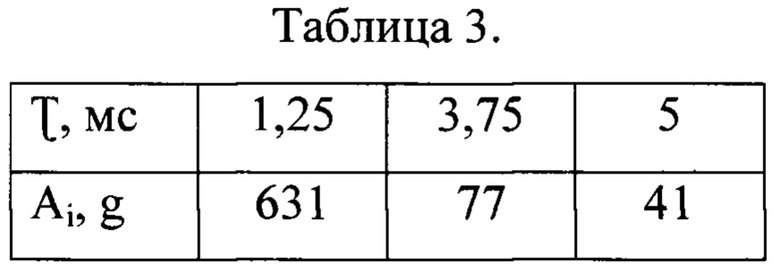
Как видно из данных, приведенных в таблице 3, при воздействии ударов малой длительности срабатывание датчика происходит при ускорениях, значительно превышающих значение, на которое настроен датчик (40g), что обеспечивает исключение срабатывания датчика при воздействии коротких ударов с малой энергией.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК УДАРНЫХ УСКОРЕНИЙ | 2003 |
|
RU2257590C1 |
| ДАТЧИК УДАРНЫХ УСКОРЕНИЙ | 2008 |
|
RU2364874C1 |
| ДАТЧИК УДАРНЫХ УСКОРЕНИЙ | 1998 |
|
RU2164692C2 |
| ДАТЧИК ПРЕДЕЛЬНЫХ УСКОРЕНИЙ | 2014 |
|
RU2580902C1 |
| Электромеханический молоток с центробежным ударным механизмом | 1976 |
|
SU614937A1 |
| ДАТЧИК ЗАЩИТНОГО УСТРОЙСТВА СИСТЕМЫ ПАССИВНОЙ БЕЗОПАСНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2043224C1 |
| ДАТЧИК СОУДАРЕНИЯ | 2003 |
|
RU2248577C1 |
| ИНЕРЦИОННЫЙ ВКЛЮЧАТЕЛЬ | 2013 |
|
RU2562057C2 |
| Твердотельный датчик линейных ускорений | 2020 |
|
RU2746112C1 |
| Датчик предельных ускорений | 2024 |
|
RU2834197C1 |

Изобретение относится к измерительной технике. Датчик содержит два узла, жестко не связанных между собой, - узел измерения, чувствительный к ударному ускорению и представляющий собой крестообразный рычаг, на котором симметрично центральной оси по разные стороны от рычага размещены четыре инерционных элемента в виде шариков, помещенных в конические седла с углом 80-83°, и узел эталонной силы, который представляет собой поляризованное реле, определяющее порог срабатывания и позволяющее обеспечить возвращение датчика в исходное состояние в случае его срабатывания. Передача усилия от узла измерений к узлу эталонной силы осуществляется через механический фильтр низких частот, в который входит демпфирующий элемент, обеспечивающий исключение влияния на срабатывание датчика ударных воздействий малой длительности. Технический результат – повышение точности датчика ударного, исключение воздействия ударов, обладающих низкой энергией, возвращение датчика в исходное состояние после срабатывания. 7 ил., 3 табл.
Датчик ударных ускорений, содержащий узел измерения, чувствительный к ударному ускорению, на основе рычага, на который воздействуют два инерционных элемента, выполненных в виде шариков, размещенных в конических седлах, и узел эталонной силы, определяющий порог срабатывания и представляющий собой расположенные на конце рычага вставки из магнитомягкого материала, размещенные между магнитом и его полюсным наконечником, отличающийся тем, что узел измерения представляет собой крестообразный рычаг, на котором симметрично центральной оси по разные стороны от рычага размещены четыре инерционных элемента, выполненных в виде шариков, помещенных в конические седла с углом 80-83°; узел эталонной силы представляет собой поляризованное реле, определяющее порог срабатывания и позволяющее обеспечить возвращение датчика в исходное состояние в случае его срабатывания; передача усилия от узла измерений к узлу эталонной силы осуществляется через механический фильтр низких частот, обеспечивающий исключение влияния на срабатывание датчика ударных воздействий малой длительности, в который входит демпфирующий элемент, состоящий из двух плоских пружин, и зазор в цепи передачи усилия от узла измерения к узлу эталонной силы.
| ДАТЧИК УДАРНЫХ УСКОРЕНИЙ | 1998 |
|
RU2164692C2 |
| ДАТЧИК ПОРОГОВЫХ УСКОРЕНИЙ | 2001 |
|
RU2180123C1 |
| Способ получения карбида бора | 1941 |
|
SU72330A1 |
| JP 2005147899 A, 09.06.2005 | |||
| JP 2000146999 A, 26.05.2000. | |||
