Изобретение относится к радиолокационной технике и может использоваться для обеспечения безопасности полетов летательных аппаратов (ЛА) путем предупреждения их экипажей о возможности столкновений с другими ЛА и наземными препятствиями.
Актуальность данной задачи следует из постоянно возрастающего с увеличением плотности воздушного движения, числа авиационных катастроф. Существующие системы предупреждения столкновений (СПС) относятся к классу взаимодействующих и представляют собой классические радиолокационные системы с активным ответом и командные радиолинии наземного и космического базирования.
Известна система управления воздушным движением "Теркас", представляющая собой радиолокационную подсистему, включающую семь радиолокационных позиций и центр управления (см. Т.Г.Анодина и др. Автоматизация управления воздушным движением. М. : Транспорт, 1992, с. 213-218). Эта система в результате радиообмена информацией между конфликтующими самолетами вырабатывает команды по маневру ЛА, необходимому для предотвращения столкновения.
Известная система не является автономной, поскольку требует установки соответствующей аппаратуры на каждом ЛА, что не всегда возможно, особенно на малых самолетах деловой и спортивной авиации, из-за ограничений на массогабаритные характеристики оборудования этих ЛА и высокой стоимости аппаратуры СПС, при этом такая система требует наличия семи отдельных каналов связи, в том числе и спутниковых.
Известна также СПС "Эшелон", выбранная в качестве прототипа (см. Т.Г. Анодина и др. Автоматизация управления воздушным движением. М.: Транспорт, 1992, с. 145-147), которая предназначена для выявления угрозы столкновения и определения взаимнокоординированных маневров ЛА, необходимых для предотвращения столкновений в вертикальной плоскости. СПС "Эшелон" связана с системой воздушных сигналов ЛА, ответчиком системы вторичной радиолокации и самолетным переговорным устройством. От высотомеров системы воздушных сигналов в аппаратуру СПС поступает информация о высоте полета, через ответчики системы вторичной радиолокации передают в наземные пункты управления воздушным движением сообщения об обнаружении конфликтной ситуации, после обработки которых на запрашивающий ЛА передается команда, рекомендующая маневр. Звуковой прерывистый сигнал через самолетное переговорное устройство оповещает экипаж об угрозе столкновения.
Эта система также требует установки соответствующей аппаратуры на ЛА и наличия ответчиков на встречных ЛА и поэтому не позволяет предупреждать экипажи о наземных препятствиях и о ЛА, не оборудованных ответчиками. Кроме того, при использовании указанной известной СПС все маневры ЛА выполняются по командам диспетчера наземных средств управления воздушным движением. Однако только около 1/4 поверхности земного шара обеспечиваются средствами управления воздушным движением. Использование для предупреждения столкновений бортовых метеорадиолокаторов, например, РЛС "Гроза", не обеспечивает безопасность полета, так как эти радиолокаторы имеют антенные системы с широкой диаграммой направленности только в вертикальной плоскости.
Технической задачей данного изобретения является создание автономной системы предупреждения столкновений, обеспечивающей надежное обнаружение препятствий и предупреждение экипажа защищаемого ЛА о наличии другого ЛА или препятствия в зоне действия СПС независимо от наличия на конфликтующем ЛА соответствующей аппаратуры.
Поставленная задача решается в радиолокационной системе предупреждения столкновений летательных аппаратов с препятствиями, содержащей первый канал, включающий приемную и передающую антенны, соединенный с ними приемопередающий блок и блок индикации, которые размещены на борту летательного аппарата (ЛА), а также блок обработки, в которую согласно изобретению введены дополнительные каналы, идентичные первому каналу, а приемная и передающая антенны каждого канала выполнены в виде планарной микроэлектронной фазированной антенной решетки (ПМФАР), размещенной на соответствующем участке поверхности корпуса ЛА, заподлицо с его обшивкой, таким образом, что направление максимума диаграммы направленности ПМФАР в вертикальной плоскости совпадает с плоскостью полета ЛА, а направление максимума диаграммы направленности в горизонтальной плоскости обеспечивает просмотр передней полусферы, при этом блок обработки размещен на борту ЛА.
ПМФАР размещены соответственно на лобовой части корпуса, на боковых частях корпуса, на крыльях и хвостовом оперении ЛА.
Приемопередающий блок каждого канала состоит из последовательно соединенных частотно-модулированного генератора, к модулирующему входу которого подсоединен генератор пилообразного напряжения направленный ответвитель, балансный смеситель, усилитель низкой частоты и амплитудный ограничитель, выход которого является первым выходом приемопередающего блока, при этом второй выход направленного ответвителя и второй вход балансного смесителя являются соответственно вторым выходом и входом приемопередающего блока, связанными соответственно с входом передающей антенны и выходом приемной антенной системы. Блок обработки выполнен в виде N фильтров и сумматора, при этом входы N фильтров объединены и являются входом блока обработки, выходы N фильтров являются соответственно N выходами блока обработки, входы сумматора соединены соответственно с выходами N-m фильтров, а его выход - является N+1 выходом блока обработки, причем выход первого фильтра является N+2 выходом блока обработки, блок индикации каждого канала состоит из N индикаторов дальности, и первого и второго звуковых сигнализаторов, входы N индикаторов дальности являются соответственно N входами блока индикации, а входы первого и второго звуковых сигнализаторов соединены соответственно с N+1 и N+2 выходами блока обработки.
Выполнение приемной и передающей антенн каждого канала в виде ПМФАР и размещение их указанным образом на поверхности ЛА обеспечивает обнаружение препятствия по отраженному от него сигналу в широком секторе, а также определение углового положения препятствия в горизонтальной плоскости и дальность до него, что позволяет экипажу ЛА своевременно выполнить необходимый маневр.
Изобретение поясняется чертежами. На фиг. 1 приведена структурная электрическая схема одного канала СПС; на фиг. 2 - показано размещение ПМФАР на поверхности ЛА; на фиг. 3 - диаграммы, поясняющие работу СПС; на фиг. 4 - конструктивное выполнение ПМФАР; на фиг. 5 показаны секторы обнаружения препятствий.
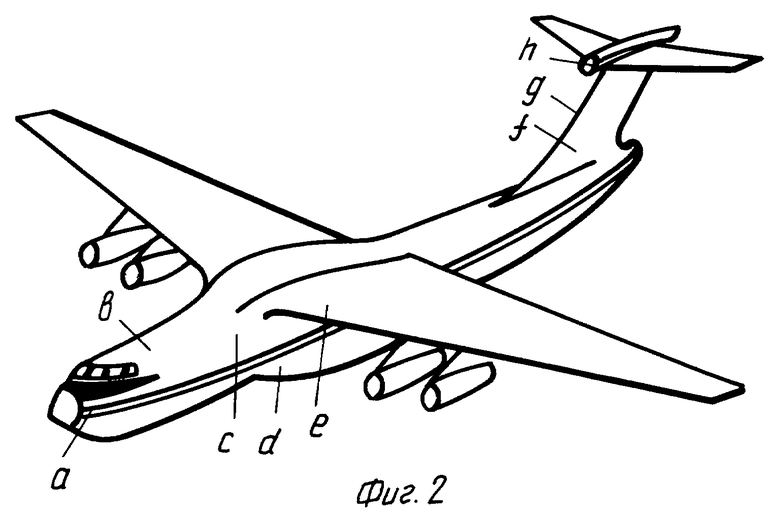
Каждый канал СПС (фиг. 1) содержит передающую и приемную антенны 1, 2, приемопередающий блок 3, блок обработки 4 и блок индикации 5.
Приемная и передающая антенны каждого канала конструктивно объединены и выполнены в виде планарной микроэлектронной фазированной антенной решетки (ПМФАР). ПМФАР соответственно размещены на соответствующих участках поверхности корпуса ЛА 6 заподлицо с его обшивкой, в частности, как показано на фиг. 4, симметрично на лобовой части корпуса a, b, симметрично на боковых частях корпуса b, с, d, симметрично на крыльях e, и хвостовом оперении ЛА f, g, h.
Каждая из ПМФАР имеет свою диаграмму направленности, обеспечивающую обзор определенного сектора обнаружения. На фиг. 5 показан суммарный 180-градусный сектор обнаружения, обеспечиваемый 15-тью ПМФАР (см. фиг. 2), где буквами обозначены сектора, создаваемые соответствующими ПМФАР, СПС имеет 15 каналов, каждый из которых работает на своей независимой частоте, что обеспечивает развязку каналов друг от друга.
Приемопередающий блок 3 каждого из каналов состоит из последовательно соединенных частотно-модулированного генератора 7, модулирующий вход которого подключен к выходу генератора пилообразного напряжения 8, направленного ответвителя 9, балансного смесителя 10, усилителя низкой частоты 11 и амплитудного ограничителя 12; блок обработки 4 состоит из N-фильтров 13 (13-1, 13-2. . . .13-N) и сумматора 14, при этом входы фильтров 13 объединены и являются входом блока обработки 3, а выходы N фильтров 13 являются соответственно N выходами блока обработки 4. Входы сумматора 14 соединены соответственно с выходами N-m фильтров 13, а его выход - является N+1-выходом блока обработки 4, N+2-выходом которого является выход первого фильтра 13-1. Блок индикации 5 состоит из N индикаторов дальности 15 (15-1, 15-2,...,15-N, входы которых являются N входами блока индикации 5, соединенными соответственно с N выходами блока обработки 4, и первого и второго звуковых сигнализаторов 16, 17, входы которых соединены соответственно с N+1 и N+2 выходами блока обработки 4. Приемопередающий блок может быть выполнен также в виде микроэлектронной схемы, конструктивно выполненной на одной подложке с ПМФАР, образуя активный микрорадиолокатор.
При полете ЛА СПС осуществляет одновременный просмотр пространства вокруг ЛА с помощью активных микрорадиолокаторов, диаграммы направленности которых перекрывают требуемую область обнаружения. При наличии на пути ЛА препятствия сигнал, отраженный от него, поступает на вход соответствующего приемопередающего блока 3.
Зондирующий сигнал формируется в частотно-модулированном генераторе 7 и представляет собой сигнал с несущей частотой fo и несимметричным линейным пилообразным законом изменения частоты с девиацией Δfд и периодом модуляции Tм, (см. фиг. 3). Источником модулирующего сигнала является генератор пилообразного напряжения 8. Зондирующий сигнал через направленный ответвитель 9 поступает на ПМФАР 2.
Отраженный от препятствия сигнал принимается ПМФАР 2 и подается на балансный смеситель 10, в качестве гетеродинного сигнала в котором используется часть зондирующего сигнала с направленного ответвителя 9. Преобразованный в балансном смесителе 10 сигнал поступает на усилитель низких частот 11, в котором, кроме усиления сигнала, осуществляется его предварительная фильтрация. В результате фильтрации устраняется сигнал с частотой биений Fб *, соответствующих обратному ходу пилообразного сигнала генератора пилообразного напряжения 8 и все сигналы с частотами, лежащими вне рабочего диапазона частот биений F ( фиг. 3). Усиленный сигнал с частотой F ограничивается по амплитуде в амплитудном ограничителе 12, устраняющем паразитную амплитудную модуляцию, и направляется на блок обработки 4, являющийся спектроанализатором, и состоящий из N фильтров 13 и сумматора 14. Количество N фильтров определяется заданным значением разрешающей способности по дальности. Каждый из фильтров 13 выделяет сигнал с частотой, соответствующей определенному интервалу дальности. Выходы N фильтров 13 соединены с соответствующими входами блока индикации 5 и соответственно с входами индикаторов дальности 15, которые указывают расстояния до отражающего объекта - препятствия. С фильтра 13-1, выделяющего сигнал тревоги, соответствующий минимальному опасному расстоянию до препятствия, сигнал направляется на звуковой сигнализатор 17, срабатывание которого свидетельствует о необходимости выполнения маневра. Величина этого минимального расстояния до препятствия определяется способностью к маневрированию ЛА. Сигнал на выходе сумматора 14 появляется при поступлении на его входы сигналов с выходов нескольких (m) фильтров, где m-количество фильтров, определяющих заданную дальность предупреждения об опасности. Этот сигнал подается на вход звукового сигнализатора 16, выдающего сигнал предупреждения о наличии препятствия. Получив указанные сигналы и информацию о дальности до препятствия и его углового положения, экипаж ЛА может принять решение о совершении маневра с целью избежания столкновения с препятствием.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННАЯ СИСТЕМА БЛИЖНЕГО ДЕЙСТВИЯ ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ С ПРЕПЯТСТВИЯМИ МАНЕВРИРУЮЩИХ НА АЭРОДРОМЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2001 |
|
RU2192653C1 |
| УСТРОЙСТВО ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 1999 |
|
RU2176400C2 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2559196C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
| ИНДИКАТОР АВТОНОМНОЙ СИСТЕМЫ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2318244C1 |
| УСТРОЙСТВО ИНДИКАЦИИ ОПАСНОСТИ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1997 |
|
RU2131622C1 |
| ПОЛИЭРГАТИЧЕСКИЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2524508C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 1998 |
|
RU2156985C2 |
| МАЛОГАБАРИТНЫЙ РАДИОЛОКАТОР ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2117964C1 |
| РАДИОЛОКАЦИОННЫЙ ПРИБОР ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ДЛЯ СЛАБОВИДЯЩИХ И СЛЕПЫХ ЛЮДЕЙ | 2018 |
|
RU2679924C1 |



Изобретение относится к радиолокационной технике и может использоваться в качестве автономной радиолокационной системы предупреждения столкновений (СПС), обеспечивающей безопасность полетов летательных аппаратов (ЛА). Технический результат - обнаружение препятствий и предупреждение экипажа защищенного ЛА о наличии другого ЛА или препятствия в зоне действия СПС независимо от наличия на конфликтующем ЛА соответствующей аппаратуры. Радиолокационная СПС содержит микрорадиолокаторы, приемные и передающие антенны которых выполнены в виде планарных микроэлектронных фазированных антенных решеток (ПМФАР), размещенных на соответствующих участках поверхности корпуса ЛА, заподлицо с его обшивкой, таким образом, что направление максимума диаграммы направленности каждой ПМФАР в вертикальной плоскости совпадает с плоскостью полета ЛА, а направление максимума диаграммы направленности в горизонтальной плоскости обеспечивает просмотр передней полусферы. СПС снабжена блоком обработки, индикаторами дальности и звуковыми сигнализаторами, выдающими сигналы тревоги и сигналы предупреждения о наличии препятствия. 2 з.п. ф-лы, 5 ил.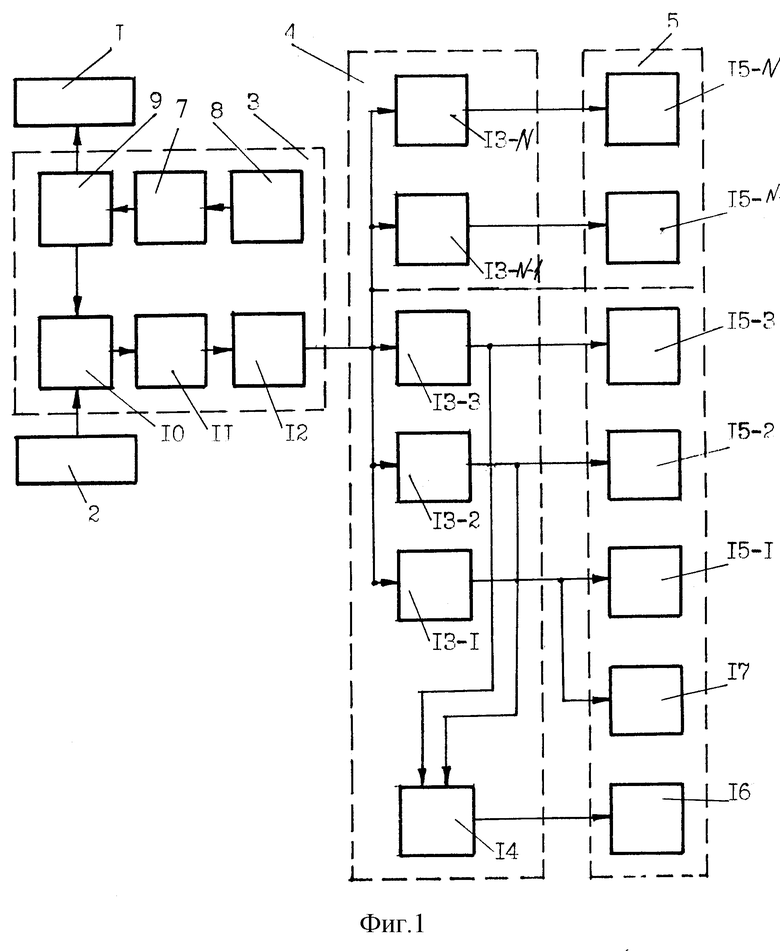
| Т.Г.АНОДИНА и др | |||
| Автоматизация управления воздушным движением | |||
| - М.: Транспорт, 1992, с.145 - 147 | |||
| US 3714654 A, 30.01.1973 | |||
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1989 |
|
RU2111505C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ | 1993 |
|
RU2124760C1 |
| DE 1917140 B2, 31.08.1972 | |||
| Устройство для передачи и контроля сигналов | 1985 |
|
SU1300531A1 |
| Пожарный двухцилиндровый насос | 0 |
|
SU90A1 |
| EP 0707220 A2, 14.04.1996 | |||
| Т.Г.АНОДИНА и др | |||
| Автоматизация управления воздушным движением | |||
| - М.: Транспорт, 1992, с.213 - 218. | |||

