Изобретение относится к области радиотехники, а именно к системам радиопеленгации и, в частности, может быть использовано для определения местоположения источников радиоизлучения (ИРИ) путем сопоставления в одной системе координат двух и более найденных направлений на обнаруженный ИРИ.
Заявленное техническое решение расширяет арсенал средств данного назначения.
Известен способ определения местоположения источника радиоизлучения (по патенту РФ №94037804 А1, МПК 6 G 01 S 5/04, опубл. 20.08.96 г.). Известный способ заключается в вычислении систематических ошибок измерения углов места на основе применения инвариантных во времени величин, характеризующих геометрию задачи ведения поиска, вычислении истинных углов места на объекты и затем определении их местоположения азимутально-угломестным способом.
Недостатком данного аналога является относительно невысокая точность определения местоположения ИРИ при использовании азимутально-угломестного способа.
Известен также способ определения местоположения источника радиоизлучения (по патенту РФ №94018214 А1, МПК 6 G 01 S 5/04, опубл. 27.01.96 г.). Известный способ заключается в вычислении систематических ошибок пеленгования на основе применения инвариантных во времени величин, характеризующих геометрию задачи определения местоположения источника радиоизлучения, вычислении истинных пеленгов на объекты и определении их местоположения триангуляционным методом. Методами оптимального оценивания выполняют оценку ошибок измерения пеленга и корректируют координаты местоположения ИРИ.
Недостатком данного аналога является относительно невысокая точность определения местоположения ИРИ, что обусловлено существенным снижением точности пеленгации при уменьшении отношения сигнал/шум, приводящего к ошибкам измерения.
Наиболее близким по своей технической сущности к заявленному является способ определения структуры систем связи (по патенту РФ №2151406 С1, МПК 7 G 01 S 5/04, опубл. 20.06.2000 г.). Способ-прототип заключается в том, что синхронно со всех антенн от нескольких станций обнаружения - пеленгования (СОП) производят регистрацию радиосигналов. Преобразованием Фурье по времени восстанавливают комплексные спектры сигналов каждой антенны и спектр мощности сигнала опорной антенны, сравнением которого с порогом выбирают частоты, на которых вычисляют комплексные амплитуды обнаруженных сигналов. Используя комплексные амплитуды, с помощью двумерного пространственного преобразования Фурье восстанавливают двумерный комплексный угловой спектр обнаруженных сигналов, по модулю которого определяют азимутальные и угломестные пеленги. В центральном вычислителе, связанном со всеми СОП, используя двумерные пеленги, совпадающие по времени и частоте, вычисляют местоположения ИРИ в пространстве.
По сравнению с аналогами способ прототип может быть использован в более широкой области, когда необходимо одновременное определение местоположения нескольких ИРИ. Кроме того, за счет использования в расчетах пеленга при относительно низких отношениях сигнал/шум (сигнал/помеха) двумерного пространственного преобразования Фурье достигается некоторое повышение точности местоположения ИРИ по отношению к аналогам.
Недостатком прототипа является недостаточно высокая точность определения местоположения ИРИ. Это объясняется тем, что несмотря на повышение точности пеленгования радиосигналов при относительно низких отношениях сигнал/шум и ослабленном отрицательном влиянии взаимной связи ненаправленных антенн, используемый в способе-прототипе алгоритм расчета местоположения ИРИ в пространстве не учитывает весовые коэффициенты точек пересечения лучей с найденными для каждой СОП пеленгами, что снижает точность определения местоположения ИРИ.
Целью заявленного технического решения является разработка способа определения местоположения источника радиоизлучения, обеспечивающего повышение точности определения местоположения обнаруженного ИРИ за счет учета весовых коэффициентов для всех точек пересечения линий пеленгов и корректировки рассчитанных координат с помощью поисковой итерационной процедуры наискорейшего спуска.
Поставленная цель достигается тем, что в известном способе определения местоположения ИРИ, заключающемся в том, что принимают обнаруженный сигнал источника радиоизлучения с помощью N, где N≥2, идентичных пунктов приема (ПП), снабженных антенными решетками, каждая из которых состоит из К, где К≥2, пар излучателей, измеряют первичные пространственные параметры принятых сигналов, вычисляют пеленги на ИРИ от каждого ПП, по данным которых вычисляют местоположение ИРИ, предварительно задают пороговое (Uc-Uш)пор и нормирующее (Uс-Uш)норм значения разностей уровней сигнала и шума. Затем на каждом i-ом, где i=1, ..., N, ПП измеряют в течение времени контроля за ИРИ уровень шумов Uшi, а с интервалом времени t - амплитуду и фазу обнаруженного и принятого сигнала ИРИ каждым антенным излучателем. После вычисления усредненного значения уровня сигнала Uшi и разности фаз Δϕik для каждой k-й пары излучателей i-го ПП запоминают частоту сигнала ИРИ, а затем на каждом i-ом ПП формируют пакеты данных, содержащие информацию о частоте принятого сигнала, уровне шума, усредненном значении уровня сигнала, а также разности фаз для каждой пары антенных излучателей. Затем передают пакеты данных (ПД) по каналам связи на центральный вычислитель, где по информации каждого ПД вычисляют разности уровней сигнала и шума и сравнивают их с пороговым значением (Uc-Uш)пор. Для вычисления пеленга на ИРИ из всей совокупности пакетов выделяют N* пакетов, для которых вычисленные разности уровней сигнала и шума превышают пороговое значение, затем для j-го, где j=1, ..., N*, ПП последовательно с предварительно заданным шагом Δα в интервале от 0 до 360°, соответствующего одному из выделенных групп пакетов. Далее задают гипотетическое значение пеленга αj на обнаруженный источник радиоизлучения и для каждого αj вычисляют соответствующую ему разность фаз для всех пар излучателей и разность между рассчитанными и ранее измеренными разностями фаз для соответствующей пары излучателей. Затем вычисляют суммарную погрешность Sj(αj), суммируя найденные разности, и запоминают ее. Из всех запомненных Sj(αj) выбирают максимальную, на которую нормируют все остальные, затем из всех нормированных значений суммарных погрешностей Sj H выбирают минимальное Sj H min, а соответствующее ей значение гипотетического азимута αj принимают за искомое значение пеленга на ИРИ для j-го ПП. Для вычисления местоположения ИРИ рассчитывают координаты точек пересечения лучей найденных N* пеленгов от каждого ПП и для каждой из них вычисляют весовой коэффициент. Затем рассчитывают средневзвешенное значение координат местоположения ИРИ по всем точкам пересечения линий пеленгов, после чего корректируют рассчитанные координаты с помощью поисковой итерационной процедуры наискорейшего спуска.
Для вычисления весового коэффициента Wjq точки Ojq пересечения j-го и q-го, где q=1, ..., N и j≠q, лучей вычисленных пеленгов рассчитывают дискретную функцию правдоподобия Тj(αj) по формуле:
Tj(αj)=1-Sj H min.
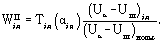
Затем нормируют разности уровней сигнала и шума, рассчитанные для j-го и q-го пунктов приема на (Uc-Uш)норм, и вычисляют вес j-го и q-го пеленгов  для рассматриваемой точки пересечения пеленгов по формуле:
для рассматриваемой точки пересечения пеленгов по формуле:
Далее рассчитывают среднее арифметическое весов j-го и q-го пеленгов  для точки пересечения Ojq и угол βjq между j-ым и q-ым пеленгами, а весовой коэффициент точки пересечения Wjq вычисляют по формуле:
для точки пересечения Ojq и угол βjq между j-ым и q-ым пеленгами, а весовой коэффициент точки пересечения Wjq вычисляют по формуле:

Для расчета средневзвешенного значения координат xири, уири местоположения ИРИ по всем точкам пересечения линий пеленгов предварительно для точки, лежащей на j-ом луче пеленга, вычисляют ее средневзвешенные координаты xj, yj и весовой коэффициент Wj относительно координат и весовых коэффициентов точек пересечения j-го луча пеленга лучами других пеленгов. После этого средневзвешенные значения координат местоположения источника радиоизлучения по всем точкам пересечения линий пеленгов вычисляют по формуле:

Для вычисления средневзвешенных координат xj, yj и весового коэффициента Wj точек пересечения j-го луча пеленга лучами других пеленгов используют рекуррентную процедуру.
Благодаря указанной новой совокупности существенных признаков в заявленном способе за счет учета ошибок пеленга, полученных при пеленгации ИРИ, путем применения весовой обработки и использования поисковой итерационной процедуры обеспечивается повышение точности определения местоположения ИРИ.
Проведенный анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют, что указывает на соответствие заявленного способа условию патентоспособности «новизна».
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками, показали, что они не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень».
Заявленный способ поясняется чертежами, на которых показаны:
фиг.1 - общая структура системы определения местоположения ИРИ;
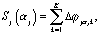
фиг.2 - общая структура пункта измерения первичных пространственных параметров;
фиг.3 - структура пакета данных;
фиг.4 - иллюстрация подхода к формированию гипотетических значений пеленга на источник ИРИ каждого ПП;
фиг.5 - вариант зависимости нормированных значений суммарных погрешностей на j-ом ПП от гипотетического значения пеленга на источник ИРИ;
фиг.6 - схема, поясняющая определение точек пересечения лучей с найденными для каждого ПП пеленгами;
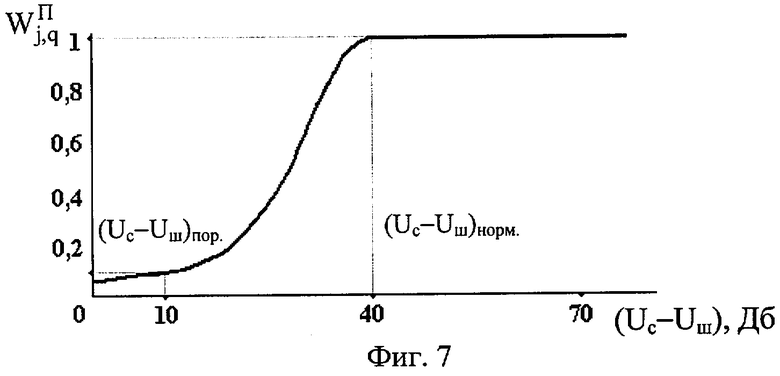
фиг.7 - график нормировки разности уровней сигнала и шума;
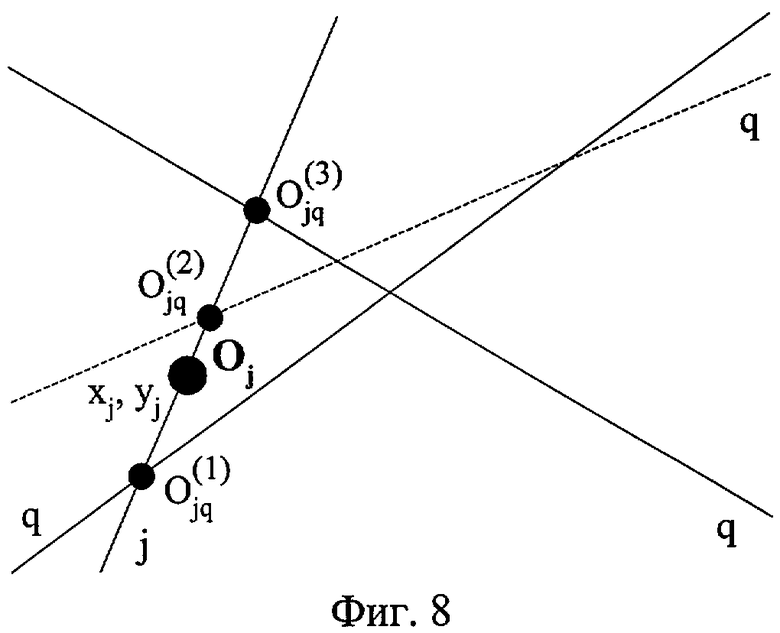
фиг.8 - иллюстрация выполнения рекуррентной процедуры;
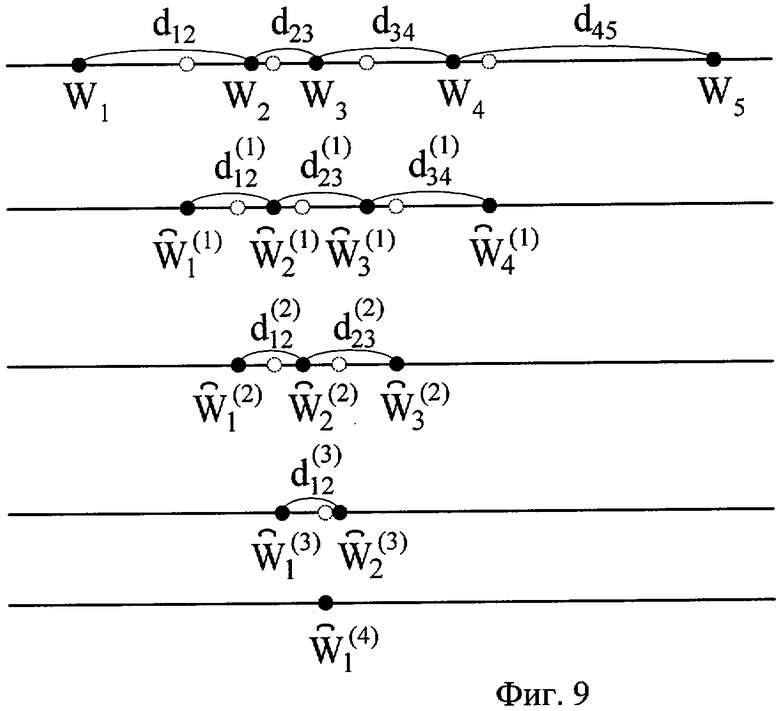
фиг.9 - вариант определения средневзвешенных координат хj, yj для точки, лежащей на j-ом луче пеленга, относительно точек пересечения j-го луча пеленга лучами других пеленгов;
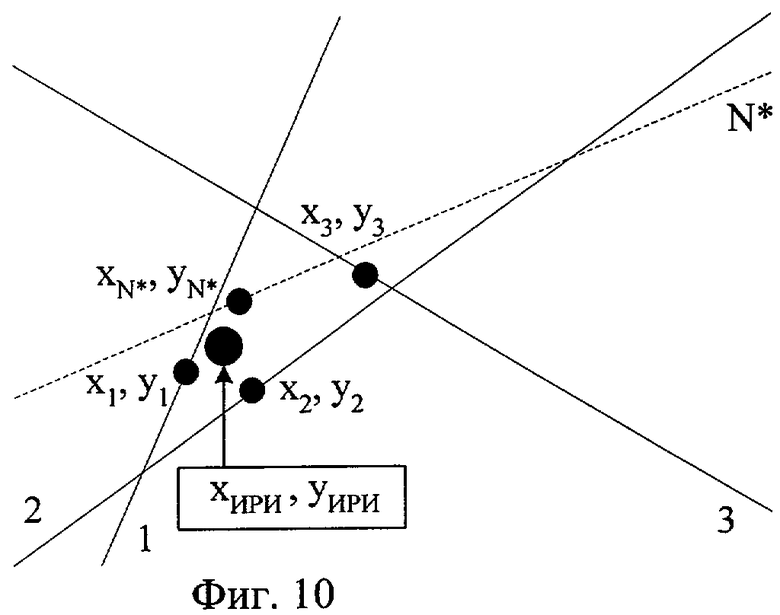
фиг.10 - вариант определения средневзвешенного значения координат хИРИ, уИРИ местоположения ИРИ по всем точкам пересечения линий пеленгов.
В общем случае система определения местоположения ИРИ - это совокупность измерителей координатно-информативных параметров сигналов, разнесенных в пространстве.
Объективно необходимым условием выполнения системой местоположения ИРИ своего предназначения является доступность в широком смысле (частотная, пространственная и энергетическая) ИРИ одновременно для нескольких измерителей. Выполнение данного условия традиционно накладывало существенные ограничения при проектировании и эксплуатации систем местоопределения, особенно в УКВ диапазоне. В настоящее время продолжает оставаться низкой точность определения местоположения ИРИ. Одним из направлений повышения точности местоположения является прогнозирование условий приема в пунктах измерений для их последующего учета в ходе обработки результатов измерений.
Существенное влияние на процесс местоопределения оказывают радиопомехи. Кроме шумов и помех на процесс местоопределения влияют и всевозможные ошибки как при непосредственных, так и при косвенных измерениях, как бы тщательно они не производились. Такие ошибки снижают точность определения координатно-информативных параметров сигналов, а в конечном итоге координат ИРИ.
Таким образом, местоположение пеленгуемых объектов следует определять по всей совокупности измеренных пеленгов с учетом геометрического и энергетического факторов, путем применения весовой обработки. Это задача решается в заявленном способе.
Заявленный способ реализуют следующим образом. Рассмотрим общую структуру системы определения местоположения ИРИ, состоящую из источника радиоизлучения 1, N, где N≥2, идентичных пунктов измерения первичных пространственных параметров 2 (пунктов приема) и центрального вычислителя 3 (ЦВ) (см. фиг.1).
На каждом пункте приема (ПП) устанавливают кольцевую антенную решетку 2.1 с М элементами 2.2, каждый из которых имеет номер m=1, ..., М (см. фиг.2). Из состава антенной решетки назначают К, где К≥2, пар антенных элементов, каждая из которых имеет номер k=1, ..., К. Каждую пару антенных элементов при измерении параметров радиосигнала от ИРИ подключают с помощью коммутатора 2.3 ко входу двухканального приемника 2.4. Принятый сигнал обрабатывают устройством цифрой обработки сигнала 2.5 и установленным на каждом ПП 2i вычислителе 2.6. Для вычисления координат ИРИ предварительно задают пороговое (Uc-Uш)пор и нормирующее (Uc-Uш)норм значения разностей уровней сигнала и шума.
В течение времени контроля за ИРИ на каждом i-ом, где i=1, ..., N, ПП2i, измеряют уровень шумов Uшi, а с интервалом времени t - амплитуду и фазу обнаруженного и принятого сигнала ИРИ каждым антенным излучателем 2.2, вычисляют усредненное значение уровня сигнала Uшi и разность фаз Δϕik для каждой k-й пары излучателей i-го ПП2i, запоминают частоту сигнала ИРИ.
После проведения К измерений на каждом i-ом ПП2i формируют пакет данных о радиосигнале (см. фиг.3), содержащий информацию о частоте принятого сигнала, уровне шума, усредненном значении уровня сигнала, а также разности фаз для каждой пары антенных излучателей 2.2, который по каналам связи передают на ЦВ 3. На ЦВ 3 по информации каждого пакета данных вычисляют разности уровней сигнала и шума и сравнивают их с пороговым значением (Uc-Uш)nop.. Из всей совокупности пакетов выделяют N* пакетов, для которых вычисленные разности уровней сигнала и шума превышают пороговое значение.
Для j-го, где j=1, ..., N*, ПП последовательно с предварительно заданным шагом Δα в интервале от 0 до 360°, задают гипотетическое значение пеленга αj на обнаруженный источник радиоизлучения (см. фиг.4).
Далее для каждого гипотетического значения пеленга αj вычисляют суммарную погрешность измерения разности фаз по К антенным парам Sj(αj):
где  - погрешность измерения разности фаз на k-й антенной паре j-го ПП для гипотетическое значение пеленга αj.
- погрешность измерения разности фаз на k-й антенной паре j-го ПП для гипотетическое значение пеленга αj.
Расчет производят по формуле:

где R - радиус антенной решетки; λ - длина волны излучаемого сигнала; m1kj, m2kj - номера первого и второго антенных элементов антенной решетки k-й пары j-го ПП.
Максимальное значение суммарной погрешности измерений по всем гипотезам Smaxj определяют следующим образом:
На полученное значение Smaxj нормируют все остальные, затем из всех нормированных значений суммарных погрешностей Sj H выбирают минимальное Sj H min, а соответствующее ей значение гипотетического азимута αj принимают за искомое значение пеленга на ИРИ для j-го ПП (см. фиг.5, где, например, для ПП (см. фиг.4): S1 H min=0,076 и α1=197°).
Повторяя расчет Sj H min, определяют пеленг на ИРИ для каждого j-го ПП (см. фиг.6). Для определения местоположения ИРИ предварительно известным методом (см., например, Гусак А.А. Аналитическая геометрия и линейная алгебра: Справочное пособие к решению задач. - Минск: Издательство «ТетраСистемс», 2001. - 287 с.) рассчитывают координаты точек пересечения лучей найденных N пеленгов от каждого ПП и для каждой из них вычисляют весовой коэффициент.
Для вычисления весового коэффициента Wjq точки Ojq пересечения j-го и q-го, где q=1, ..., N* и j≠q, лучей вычисленных пеленгов рассчитывают дискретную функцию правдоподобия Tj(αj) по формуле:

Далее, используя нормировочный график (см. фиг.7), нормируют разности уровней сигнала и шума, рассчитанные для j-го и q-го ПП, на предварительно заданное значение (Uc-Uш)норм.. Затем вычисляют вес j-го и q-го пеленгов для рассматриваемой точки пересечения пеленгов Ojq по формуле:
Весовой коэффициент Wjq точки пересечения Ojq вычисляют по формуле:

где  - среднее арифметическое весов j-го Wq П и q-го Wq П пеленгов для точки пересечения Ojq; βjq - угол между j-ым и q-ым пеленгами.
- среднее арифметическое весов j-го Wq П и q-го Wq П пеленгов для точки пересечения Ojq; βjq - угол между j-ым и q-ым пеленгами.
Повторив процедуру расчета весовых коэффициентов по всем точкам пересечения линий пеленгов, лежащим на j-ом луче пеленга, вычисляют средневзвешенные координаты xj, yj и весовой коэффициент Wj точки Оj (на фиг.8 точка Oj) относительно координат и весовых коэффициентов точек пересечения j-го луча пеленга q лучами других пеленгов (точки  на фиг.8).
на фиг.8).
Для вычисления средневзвешенных координат xj, yj и весового коэффициента Wj точек пересечения j-го луча пеленга q лучами других пеленгов используют рекуррентную процедуру (см., например, Олейник В.Л. Рекуррентные соотношения и разностные уравнения // Соровский образовательный журнал. 2001. №3. С.114-120). Эти вычисления необходимы для учета удаленности точек пересечения друг от друга. На фиг.9 показано выполнение рекуррентной процедуры для 5 точек пересечения j-го луча пеленга q лучами других пеленгов. В качестве функционалов рекуррентной процедуры используют значения координат и весового коэффициента точек пересечения. При использовании рекуррентной процедуры предварительно задают нормирующее расстояние dH между двумя точками пересечения на луче пеленга, рассчитывают h раз, где h=1, ..., N*, действительные расстояния d12, d23, ..., d(N*-h)(N*-h+1) между точками пересечения Ha j-ом луче пеленга, на каждом h-ом шаге для каждого интервала d12, d23 ..., d(N*-h)(N*-h+1) средневзвешенные координаты  и весовой коэффициент
и весовой коэффициент  вычисляют по формуле:
вычисляют по формуле:

где u, v - индексы начала и конца соответствующего интервала; duv - длина интервала; Wu,v, xu,v, уu,v - весовые коэффициенты и координаты точек пересечения, соответствующих началу и концу каждого интервала.
Таким образом, полученные в результате рекуррентной процедуры координаты и вес последней точки (на фиг.9 - точка с весом  ) являются средневзвешенными координатами xj, yj и весовым коэффициента Wj точек пересечения j-го луча пеленга q лучами других пеленгов.
) являются средневзвешенными координатами xj, yj и весовым коэффициента Wj точек пересечения j-го луча пеленга q лучами других пеленгов.
Определив средневзвешенные координаты xj, yj и весовые коэффициенты для всех лучей пеленга, повторив для этого их вычисление q раз, рассчитывают средневзвешенное значение координат местоположения ИРИ.
Средневзвешенные значения координат xИРИ, уИРИ местоположения ИРИ по всем точкам пересечения линий пеленгов (см. фиг.10) вычисляют по формуле:
Рассчитанные координаты Хири, Уири корректируют одним из поисковых методов нелинейного программирования, например с помощью поисковой итерационной процедуры наискорейшего спуска (см., например, Фролькис В.А. Введение в теорию и методы оптимизации для экономистов. - СПб: Издательство «Питер», 2002. - 320 с.).
Для корректировки рассчитанных координат с помощью поисковой итерационной процедуры наискорейшего спуска для каждой точки Оху на плоскости, выбираемой в процессе процедуры, вычисляют приближенное значение функции правдоподобия  гипотетического пеленга αj на j-ом ПП. Расчет приближенного значения функции правдоподобия гипотетического пеленга αj на j-ом пункте приема выполняют с помощью интерполяционной процедуры Лагранжа по четырем точкам (см., например, Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся. - М.: Наука, 1981. - 720 с.). При вычислении интерполяционной процедуры Лагранжа по четырем точкам используют рассчитанные значения дискретной функции правдоподобия Тj(αj) на четырех ближайших к точке Оху лучах с началом в координатах j-го ПП и направлениями, соответствующими азимутам четырех гипотетических значений пеленга αj. Далее рассчитывают вес Wxy точки Оху по формуле:
гипотетического пеленга αj на j-ом ПП. Расчет приближенного значения функции правдоподобия гипотетического пеленга αj на j-ом пункте приема выполняют с помощью интерполяционной процедуры Лагранжа по четырем точкам (см., например, Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся. - М.: Наука, 1981. - 720 с.). При вычислении интерполяционной процедуры Лагранжа по четырем точкам используют рассчитанные значения дискретной функции правдоподобия Тj(αj) на четырех ближайших к точке Оху лучах с началом в координатах j-го ПП и направлениями, соответствующими азимутам четырех гипотетических значений пеленга αj. Далее рассчитывают вес Wxy точки Оху по формуле:

В результате выполнения поисковой итерационной процедуры наискорейшего спуска выбирают точку, имеющую максимальное значение веса Wxy, координаты которой принимают за искомые координаты местоположения ИРИ.
Таким образом, заявленный способ обеспечивает повышение точности местоположения ИРИ за счет учета весовых коэффициентов для всех точек пересечения линий пеленгов и корректировки рассчитанных координат с помощью поисковой итерационной процедуры наискорейшего спуска. Этим достигается сформулированная цель - разработка способа определения местоположения источника радиоизлучения, обеспечивающего повышение точности местоположения обнаруженного ИРИ.
Изобретение относится к области радиотехники, а именно к системам радиопеленгации и, в частности, может быть использовано для определения местоположения источников радиоизлучения (ИРИ) путем сопоставления в одной системе координат двух и более найденных направлений на обнаруженный ИРИ. Технический результат заключается в повышении точности определения местоположения обнаруженного ИРИ. Способ заключается в том, что предварительно для каждого пункта приема, принявшего радиосигнал с заданным качеством, по рассчитанным минимальным нормированным значениям суммарных погрешностей разности фаз всех пар излучателей по всем гипотетическим в интервале от 0 до 360° направлениям вычисляют пеленги на ИРИ, далее рассчитывают средневзвешенное значение координат местоположения источника радиоизлучения по всем точкам пересечения линий пеленгов, после чего корректируют рассчитанные координаты с помощью поисковой итерационной процедуры наискорейшего спуска. 3 з.п. ф-лы, 10 ил.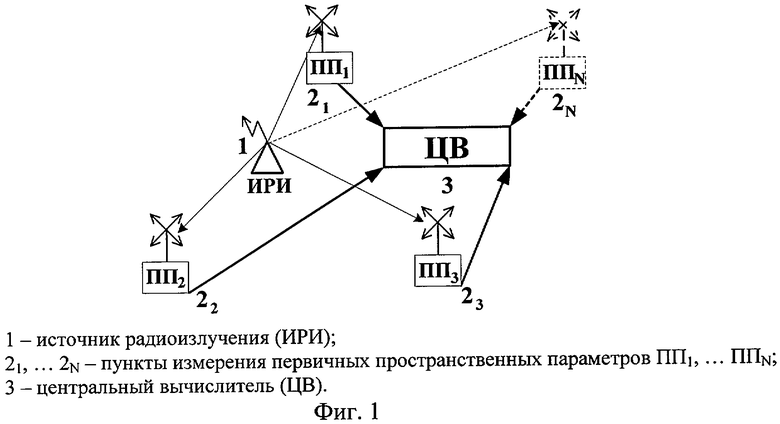
Tj(αj)=1-Sj H min,
нормируют разности уровней сигнала и шума, рассчитанные для j-го и q-го пунктов приема на (Uc-Uш)норм., вычисляют вес j-го и q-го пеленгов  для рассматриваемой точки пересечения пеленгов по формуле
для рассматриваемой точки пересечения пеленгов по формуле
рассчитывают среднее арифметическое весов j-го и q-го пеленгов  для точки пересечения Оjq и угол βjq между j-м и q-м пеленгами, а весовой коэффициент точки пересечения Wjq вычисляют по формуле
для точки пересечения Оjq и угол βjq между j-м и q-м пеленгами, а весовой коэффициент точки пересечения Wjq вычисляют по формуле


| СПОСОБ ОПРЕДЕЛЕНИЯ СТРУКТУРЫ СИСТЕМ СВЯЗИ | 1999 |
|
RU2151406C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И РЕАЛИЗУЮЩЕЕ ЕГО УСТРОЙСТВО | 2000 |
|
RU2204145C2 |
| US 5512909 А, 30.04.1996 | |||
| US 5389936 А, 14.02.1995 | |||
| US 6239746 B1, 29.05.2001 | |||
| WO 2004011955 Al, 05.02.2004. | |||

