Изобретение относится к области радиотехники, а именно к системам радиопеленгации, и, в частности, может быть использовано для определения местоположения источников радиоизлучения (ИРИ) путем сопоставления в одной системе координат двух и более найденных направлений на обнаруженный ИРИ.
Заявленное техническое решение расширяет арсенал средств данного назначения.
Известен способ определения местоположения источника радиоизлучения (по патенту РФ №94037804 А1, МПК 6 G01S 5/04, опубл. 20.08.96 г.). Известный способ заключается в вычислении систематических ошибок измерения углов места на основе применения инвариантных во времени величин, характеризующих геометрию задачи ведения поиска, вычислении истинных углов места на объекты и затем определении их местоположения азимутально-угломестным способом.
Недостатком данного аналога является относительно невысокая точность определения местоположения ИРИ при использовании азимутально-угломестного способа.
Известен также способ определения местоположения источника радиоизлучения (по патенту РФ №94018214 А1, МПК 6 G01S 5/04, опубл. 27.01.96 г.). Известный способ заключается в вычислении систематических ошибок пеленгования на основе применения инвариантных во времени величин, характеризующих геометрию задачи определения местоположения источника радиоизлучения, вычислении истинных пеленгов на объекты и определении их местоположения триангуляционным методом. Методами оптимального оценивания выполняют оценку ошибок измерения пеленга и корректируют координаты местоположения ИРИ.
Недостатком данного аналога является относительно невысокая точность определения местоположения ИРИ, что обусловлено существенным снижением точности пеленгации при уменьшении отношения сигнал/шум, приводящего к ошибкам измерения.
Известен также способ определения местоположения источника радиоизлучения (по патенту РФ №2151406 С1, МПК 7 G01S 5/04, опубл. 20.06.2000 г.). Известный способ заключается в том, что синхронно со всех антенн от нескольких станций обнаружения - пеленгования (СОП) производят регистрацию радиосигналов. Преобразованием Фурье по времени восстанавливают комплексные спектры сигналов каждой антенны и спектр мощности сигнала опорной антенны, сравнением которого с порогом выбирают частоты, на которых вычисляют комплексные амплитуды обнаруженных сигналов. Используя комплексные амплитуды, с помощью двумерного пространственного преобразования Фурье восстанавливают двумерный комплексный угловой спектр обнаруженных сигналов, по модулю которого определяют азимутальные и угломестные пеленги. В центральном вычислителе, связанном со всеми СОП, используя двумерные пеленги, совпадающие по времени и частоте, вычисляют местоположения ИРИ в пространстве.
Недостатком данного аналога является относительно невысокая точность определения местоположения ИРИ. Это объясняется тем, что используемый в способе-аналоге алгоритм расчета местоположения ИРИ в пространстве не учитывает весовые коэффициенты точек пересечения лучей с найденными для каждой СОИ пеленгами, что снижает точность определения местоположения ИРИ.
Наиболее близким по своей технической сущности к заявленному является способ определения местоположения источника радиоизлучения (по патенту РФ №2258941, опубл. 20.08.2005 г.). Способ-прототип заключается в том, что принимаются обнаруженные сигналы от контролируемого источника радиоизлучения несколькими идентичными пунктами приема, снабженными антенными решетками с несколькими парами антенных элементов, и измеряют первичные пространственные параметры принятых сигналов. Предварительно задают пороговое и нормирующее значения разностей уровней сигнала и шума. На каждом пункте приема измеряют в течение времени контроля за источником радиоизлучения уровень шумов, а за определенный интервал времени - амплитуду и фазу обнаруженного и принятого сигнала источника радиоизлучения каждым антенным излучателем, для каждой пары антенных элементов вычисляют усредненное значение уровня сигнала и разности фаз. На пунктах приема формируют пакеты данных, содержащих информацию о частоте принятого сигнала, уровне шума, усредненном значении уровня сигнала, а также разности фаз для каждой пары антенных излучателей. Пакеты данных по каналам связи передают на центральный вычислитель, где по информации каждого пакета данных вычисляют разности уровней сигнала и шума и сравнивают их с пороговым значением. Из всей совокупности пакетов выделяют пакеты, для которых вычисленные разности уровней сигнала и шума превышают пороговое значение. Затем для каждого пункта приема последовательно с заданным шагом задают гипотетическое значение пеленга на обнаруженный источник радиоизлучения и для каждого такого пеленга вычисляют соответствующую ему разность фаз для всех пар антенных элементов и разность между рассчитанными и ранее измеренными разностями фаз для соответствующей пары антенных элементов. Вычисляют суммарную погрешность путем суммирования найденных разностей и запоминают ее. Из числа всех запомненных суммарных погрешностей выбирают максимальную, на которую нормируют все остальные. Из всех нормированных значений выбирается минимальное, а соответствующее ей значение гипотетического азимута принимается за искомое значение пеленга на источник радиоизлучения для конкретного пункта приема. Для вычисления местоположения источника радиоизлучения рассчитывают координаты точек пересечения лучей найденных пеленгов от каждого пункта приема и для каждой из них вычисляют весовой коэффициент, рассчитывают средневзвешенное значение координат местоположения источника радиоизлучения по всем точкам пересечения линий пеленгов, после чего рассчитанные координаты корректируют с помощью поисковой итерационной процедуры наискорейшего спуска.
По сравнению с аналогами способ-прототип может быть использован для одновременного определения местоположения нескольких ИРИ. Кроме того, за счет учета весовых коэффициентов для всех точек пересечения линий пеленгов и корректировки рассчитанных координат с помощью поисковой итерационной процедуры наискорейшего спуска достигается некоторое повышение точности определения местоположения ИРИ по отношению к аналогам.
Недостатком прототипа все же является недостаточно высокая точность определения местоположения ИРИ. Это объясняется тем, что совокупность действий по определению местоположения ИРИ не учитывает систематические и случайные ошибки измерения параметров излучений ИРИ пунктами приема, вызванные особенностями радиоэлектронной обстановки в местах расположения пунктов приема, изменением характеристик антенных элементов и другими факторами.
Целью заявленного технического решения является разработка способа определения местоположения обнаруженного источника радиоизлучения, обеспечивающего повышение точности за счет учета систематических и случайных ошибок, связанных с изменением радиоэлектронной обстановки и характеристик антенных элементов при определении параметров сигналов контролируемого ИРИ путем анализа сигналов от эталонных источников радиоизлучения.
Поставленная цель достигается тем, что в известном способе определения местоположения контролируемого источника радиоизлучения предварительно задают пороговое (Uс-Uш)пор. и нормирующее (Uс-Uш)норм. значения разностей уровней сигнала Uс и шума Uш в месте установки каждого i-го пункта приема, где i=1,2..., N, N≥2 - общее число идентичных пунктов приема, каждый из которых снабжен антенной решеткой, состоящей из K≥2 пар антенных элементов. На каждом i-м пункте приема в течение времени контроля за источником радиоизлучения измеряют уровень шумов Uшi, а с интервалом времени Δt - амплитуду и фазу обнаруженного и принятого сигнала контролируемого источника радиоизлучения каждым антенным элементом и вычисляют усредненное значение уровня сигнала Uci и разность фаз Δϕik для каждой k-й пары антенных элементов i-го пункта приема. Частоту сигнала источника радиоизлучения запоминают, затем на каждом i-м пункте приема формируют пакеты данных, содержащие информацию о частоте принятого сигнала, уровне шума, усредненном значении уровня сигнала, а также разности фаз для каждой пары антенных элементов и передают пакеты данных по каналам связи на центральный вычислитель. На центральном вычислителе по информации каждого пакета данных вычисляют разности уровней сигнала и шума и сравнивают их с пороговым значением (Uc-Uш)пор. Затем вычисляют пеленги на контролируемые источники излучения, для чего из всей совокупности принятых на центральном вычислителе пакетов данных выделяют группу N* пакетов, для которых вычисленные разности уровней сигнала и шума превышают пороговое значение, после чего для j-го, где j=1,...,N*, пункта приема последовательно с предварительно заданным шагом Δα в интервале от 0 до 360°, задают гипотетическое значение пеленга αj на обнаруженный контролируемый источник радиоизлучения и для каждого αj вычисляют соответствующую ему разность фаз для всех пар антенных элементов и разность между рассчитанными  и ранее измеренными
и ранее измеренными  разностями фаз для соответствующей пары антенных элементов. После этого вычисляют суммарную погрешность Sj(αj) путем суммирования вычисленных погрешностей и запоминают ее, из всех запомненных Sj(αj) выбирают максимальную, на которую нормируют все запомненные суммарные погрешности. Из числа нормированных суммарных погрешностей Sj H выбирают минимальную Sj H min, а соответствующее ей значение гипотетического азимута αj принимают за искомое значение пеленга на контролируемый источник радиоизлучения для j-го пункта приема, затем вычисляют местоположение контролируемого источника радиоизлучения. Для вычисления местоположения ИРИ рассчитывают координаты точек пересечения лучей найденных пеленгов от каждого из N* пунктов приема, для каждой точки пересечения лучей вычисляют весовой коэффициент и рассчитывают средневзвешенное значение координат местоположения контролируемого источника радиоизлучения по всем точкам пересечения линий пеленгов. После этого корректируют рассчитанные координаты местоположения контролируемого источника радиоизлучения с помощью поисковой итерационной процедуры наискорейшего спуска. Кроме того, в зоне контроля в точках с известными координатами устанавливают дополнительно F≥2 эталонных источников радиоизлучения и для каждой k-й пары антенных элементов i-го пункта приема рассчитывают и запоминают величину эталонной разности фаз
разностями фаз для соответствующей пары антенных элементов. После этого вычисляют суммарную погрешность Sj(αj) путем суммирования вычисленных погрешностей и запоминают ее, из всех запомненных Sj(αj) выбирают максимальную, на которую нормируют все запомненные суммарные погрешности. Из числа нормированных суммарных погрешностей Sj H выбирают минимальную Sj H min, а соответствующее ей значение гипотетического азимута αj принимают за искомое значение пеленга на контролируемый источник радиоизлучения для j-го пункта приема, затем вычисляют местоположение контролируемого источника радиоизлучения. Для вычисления местоположения ИРИ рассчитывают координаты точек пересечения лучей найденных пеленгов от каждого из N* пунктов приема, для каждой точки пересечения лучей вычисляют весовой коэффициент и рассчитывают средневзвешенное значение координат местоположения контролируемого источника радиоизлучения по всем точкам пересечения линий пеленгов. После этого корректируют рассчитанные координаты местоположения контролируемого источника радиоизлучения с помощью поисковой итерационной процедуры наискорейшего спуска. Кроме того, в зоне контроля в точках с известными координатами устанавливают дополнительно F≥2 эталонных источников радиоизлучения и для каждой k-й пары антенных элементов i-го пункта приема рассчитывают и запоминают величину эталонной разности фаз  на f-й, где f=1,..F, эталонный источник радиоизлучения. На каждом i-м пункте приема от эталонных источников радиоизлучения в пределах заданного интервала времени Т Zmin раз принимают сигналы и затем выполняют над ними такие же действия, как и над сигналами, принятыми от контролируемого источника радиоизлучения, а в формируемые на пункте приема пакеты дополнительно включают данные об идентификационном признаке эталонного источника радиоизлучения, времени и частоте принятого от него сигнала, а также об усредненном значении уровня этого сигнала и разности фаз для каждой k-й пары антенных элементов кольцевой антенной решетки i-го пункта приема. После приема на центральном вычислителе сформированных на пунктах приема пакетов данных из них выделяют пакеты, содержащие данные о сигналах от эталонных источников радиоизлучения, выделяют идентификационный признак i-го пункта приема, передавшего этот пакет данных, данные о разностях фаз
на f-й, где f=1,..F, эталонный источник радиоизлучения. На каждом i-м пункте приема от эталонных источников радиоизлучения в пределах заданного интервала времени Т Zmin раз принимают сигналы и затем выполняют над ними такие же действия, как и над сигналами, принятыми от контролируемого источника радиоизлучения, а в формируемые на пункте приема пакеты дополнительно включают данные об идентификационном признаке эталонного источника радиоизлучения, времени и частоте принятого от него сигнала, а также об усредненном значении уровня этого сигнала и разности фаз для каждой k-й пары антенных элементов кольцевой антенной решетки i-го пункта приема. После приема на центральном вычислителе сформированных на пунктах приема пакетов данных из них выделяют пакеты, содержащие данные о сигналах от эталонных источников радиоизлучения, выделяют идентификационный признак i-го пункта приема, передавшего этот пакет данных, данные о разностях фаз  и времени их вычисления, Zmin раз принятые данные запоминают и затем для Zmin запомненных данных за последний интервал времени, в течение которого они были приняты, вычисляют коэффициент усредненной систематической ошибки Рki, величину отклонения
и времени их вычисления, Zmin раз принятые данные запоминают и затем для Zmin запомненных данных за последний интервал времени, в течение которого они были приняты, вычисляют коэффициент усредненной систематической ошибки Рki, величину отклонения  измеренной от f-го эталонного источника радиоизлучения разности фаз
измеренной от f-го эталонного источника радиоизлучения разности фаз  на k-й антенной паре j-го приемного пункта, от ранее вычисленной эталонной величины
на k-й антенной паре j-го приемного пункта, от ранее вычисленной эталонной величины  , значение функции достоверности текущего измерения разности фаз
, значение функции достоверности текущего измерения разности фаз  и коэффициент достоверности измерений Dki k-й антенной парой соответственно по формулам
и коэффициент достоверности измерений Dki k-й антенной парой соответственно по формулам

Каждый раз после приема очередного (Zmin+1)-го пакета, содержащего данные о сигналах от эталонного источника радиоизлучения, его запоминают в массиве данных, а ранее запомненный z=1-пакет исключают из массива, при этом значения 

 и Dki вычисляют для новой совокупности Zmin данных. Суммарную погрешность Sj(αj) вычисляют с учетом рассчитанных значений Рki и Dki по формулам
и Dki вычисляют для новой совокупности Zmin данных. Суммарную погрешность Sj(αj) вычисляют с учетом рассчитанных значений Рki и Dki по формулам

а координаты j-го контролируемого ИРИ рассчитывают с учетом уточненных значений Sj(αj) и 
Благодаря указанной новой совокупности существенных признаков в заявленном способе за счет учета систематических и случайных ошибок измерения разности фаз антенными элементами пунктов приема осуществляют путем анализа сигналов от эталонных источников радиоизлучения.
Проведенный анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют, что указывает на соответствие заявленного способа условию патентоспособности «новизна».
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками, показали, что они не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень».
Заявленный способ поясняется чертежами, на которых показаны:
фиг.1 - общая структура системы определения местоположения ИРИ;
фиг.2 - общая структура пункта измерения первичных пространственных параметров;
фиг.3 - иллюстрация формирования массивов результатов измерений разностей фаз;
фиг.4 - вариант графика функции достоверности измерения разности фаз;
фиг.5 - варианты зависимости нормированных значений суммарных погрешностей на j-м ПП от гипотетического значения пеленга на источник ИРИ, определяемые без (а) и с учетом (б) погрешностей измерения фаз антенных пар ПП.
В общем случае система определения местоположения источников радиоизлучения представляет собой совокупность разнесенных в пространстве пунктов приема, снабженных аппаратурой измерения параметров сигналов. Необходимым условием выполнения системой определения местоположения ИРИ своего предназначения является доступность в широком смысле (частотная, пространственная и энергетическая) ИРИ одновременно для нескольких пунктов приема. Выполнение данного условия накладывает ряд требований при проектировании и эксплуатации систем местоопределения, особенно в УКВ диапазоне. Точность определения местоположения ИРИ в настоящее время продолжает оставаться низкой, что обуславливается рядом факторов. Одним из направлений повышения точности местоположения является прогнозирование условий приема в пунктах измерений для их последующего учета в ходе обработки результатов измерений.
Существенное влияние на процесс местоопределения оказывают условия приема радиосигнала в местах установки пунктов приема, к числу которых необходимо отнести наличие радиопомех, особенности электромагнитной обстановки в местах расположения пунктов приема, а также состояние приемного оборудования пунктов приема, в первую очередь антенных элементов. Такие ошибки снижают точность определения координатно-информативных параметров сигналов, а в конечном итоге координат ИРИ.
Таким образом, местоположение пеленгуемых объектов следует определять по всей совокупности измеренных пеленгов с учетом геометрического и энергетического факторов, путем применения весовой обработки. Это задача решается в заявленном способе.
Заявленный способ реализуют следующим образом. Рассмотрим общую структуру системы определения местоположения ИРИ, состоящую из источника радиоизлучения (1), координаты местоположения которого необходимо определить, и F≥2 эталонных (стационарных) источников радиоизлучения (ЭИРИ) 41-4F, местоположения которых известны, идентичных пунктов приема (ПП) 21-2N и центрального вычислителя (ЦВ) 3 (см. фиг.1).
В общем виде каждый i-й ПП 2i включает кольцевую антенную решетку (КАР) 2.1, состоящую из K≥2 пар антенных элементов 2.2 (фиг.2).
Каждую пару антенных элементов при измерении параметров радиосигнала от ИРИ подключают с помощью коммутатора 2.3 ко входу двухканального приемника 2.4. Принятые сигналы обрабатывают устройством цифровой обработки сигнала 2.5 и установленным на каждом ПП 2i вычислителем 2.6. Для вычисления координат ИРИ предварительно задают пороговое (Uc-Uш)пор. и нормирующее (Uc-Uш)норм. значения разностей уровней сигнала и шума.
Для вычисления весовых коэффициентов предварительно для каждой k-й, где k=1,2,...,K, антенной пары i-го пункта приема, где i=1,2,...,N, рассчитывают величину разности фаз  на f-й, где f=1,2,...,F, ЭИРИ 4f.
на f-й, где f=1,2,...,F, ЭИРИ 4f.
В течение времени контроля за ИРИ и ЭИРИ на каждом i-м ПП 2i непрерывно измеряют уровень шумов Um, а с интервалом времени Δt - амплитуду и фазу обнаруженного и принятого сигнала ИРИ (сигнала ЭИРИ) каждым антенным элементом 2.2, вычисляют усредненное значение уровня сигнала Uci и разность фаз Δϕki для каждой k-й пары излучателей i-го ПП 2i, кроме того, запоминают частоту сигнала ИРИ.
После проведения требуемого числа измерений на каждом i-м ПП 2i формируют пакет данных о радиосигнале конкретного ИРИ, содержащий информацию о частоте принятого сигнала, времени обнаружения сигнала, уровне шума, усредненном значении уровня сигнала, а также разности фаз для каждой пары антенных излучателей 2.2, который по каналам связи передают на ЦВ 3. На ЦВ по информации каждого пакета данных вычисляют разности уровней сигнала и шума и сравнивают их с пороговым значением (Uc-Uн)пор.. Из всей совокупности пакетов выделяют группу N* пакетов, для которых вычисленные разности уровней сигнала и шума превышают пороговое значение.
Принятая на ЦВ 3 совокупность пакетов идентифицируется по значению частоты, на основании которой определяется обнаруженный источник излучения (ИРИ, ЭИРИ). При получении пакетов с данными от эталонных источников излучения выполняется расчет весовых коэффициентов, используемых при определении пеленгов на контролируемые источники радиоизлучения.
С этой целью из принятых пакетов по зафиксированному эталонному источнику излучения определяют пункты приема, его зафиксировавшие, и измеренные разности фаз на парах антенных излучателей, запоминают значения измеренных значений разности фаз для каждой пары антенных излучателей и время их измерения в массивах данных. Массивы данных формируют по каждой антенной паре каждого пункта приема. Формирование массива данных для произвольной антенной пары показано на фиг.3.
В массиве данных накапливают сведения о последних зафиксированных значениях разности фаз k-й парой антенных элементов i-го пункта приема за определенное (заданное) время наблюдения Т. Для проведения расчетов требуется накопления данных по определенному числу реализации Zmin. По мере поступления пакетов выполняют пополнение массивов данных очередными данными по измеренным разностям фаз. После накопления данных из Zmin пакетов выполняют расчет значений искомых коэффициентов для k-й пары антенных элементов i-го ПП, а именно коэффициента усредненной систематической ошибки Рki и коэффициента достоверности измерения разности фаз антенными элементами пунктов приема Dki, используемых при расчете пеленгов источников ИРИ.
Далее каждый раз после приема очередного (Zmin+1)-го пакета, содержащего данные о сигналах от эталонного источника радиоизлучения, его запоминают в массиве данных, а ранее запомненный z=1-пакет исключают из массива, а значения Pki, Δδki и Dki вычисляют для новой совокупности z=1,2,...Zmin данных, предварительно определяя порядковые номера Zt элементов массива, где t=1,2,..., в порядке возрастания времени (в пределах заданного значения Т) их фиксации от 1 до Zmin.
Порядок расчета поправочных коэффициентов следующий. Для каждого элемента массива данных вычисляют погрешности измерения разности фаз k-й антенной парой i-го пункта приема  как разность между измеренной и расчетной величинами разности фаз
как разность между измеренной и расчетной величинами разности фаз  для направления на f-й эталонный ИРИ, на основании которых рассчитывают значение усредненной систематической погрешности Рki измерения разности фаз для данной антенной пары по формуле
для направления на f-й эталонный ИРИ, на основании которых рассчитывают значение усредненной систематической погрешности Рki измерения разности фаз для данной антенной пары по формуле
После определения усредненной систематической погрешности измерения разности фаз антенными парами пунктов приема выполняют вычисление коэффициента достоверности измерения разности фаз. Для этого вычисляют величины отклонений  измеренных значений разности фаз на k-й антенной паре
измеренных значений разности фаз на k-й антенной паре  от эталонного значения разности фаз
от эталонного значения разности фаз  по формуле
по формуле

на основании которых определяют значение функции достоверности текущего измерения разности фаз
Вариант графика функции достоверности измерения разности фаз приведен на фиг.4.
Затем определяют текущий коэффициент достоверности Dki измерения k-й антенной парой на массиве данных по формуле
Вычисленные значения коэффициентов усредненной систематической погрешности Рki и достоверности Dki измерения разности фаз используют при решении задач определения местоположения источников радиоизлучения в течение очередного заданного периода времени Т до поступления новых пакетов с данными о зафиксированных сигналах эталонных источников излучения, после чего процедуру пересчета значений Рki и Dki повторяют в порядке, описанном выше.
Для определения местоположения конкретного зафиксированного ИРИ последовательно выделяют пакеты с данными по очередному l-му источнику радиоизлучения, местоположение которого неизвестно, из которых определяют пункты приема, их зафиксировавшие, и измеренные разности фаз на парах антенных излучателей.
Для j-го, где j=1,...,N*l, ПП последовательно с предварительно заданным шагом Δα в интервале от 0 до 360° задают гипотетическое значение пеленга αj на обнаруженный источник радиоизлучения.
Далее для каждого гипотетического значения пеленга αj вычисляют суммарную погрешность измерения разности фаз по К антенным парам Sj(αj) с учетом коэффициентов достоверности Dki соответствующей пары антенных элементов:
где  - погрешность измерения разности фаз на k-й антенной паре j-го ПП для гипотетического значения пеленга αj.
- погрешность измерения разности фаз на k-й антенной паре j-го ПП для гипотетического значения пеленга αj.
Расчет значения  производят по формуле с учетом определенной систематической погрешности данной антенной пары:
производят по формуле с учетом определенной систематической погрешности данной антенной пары:

где Δϕkj - измеренная разность фаз,  - рассчитанная разность фаз.
- рассчитанная разность фаз.
Максимальное значение суммарной погрешности измерений по всем гипотезам Smax j определяют следующим образом:
На полученное значение Smax j нормируют все остальные, затем из всех нормированных значений суммарных погрешностей Sj H выбирают минимальное Sj H min, а соответствующее ей значение гипотетического азимута αj принимают за искомое значение пеленга на ИРИ для j-го ПП (см. фиг.5, где, например, для ПП1 (см. фиг.4): S1 H min=0,076 и α1=197°).
Таким образом, заявленный способ обеспечивает повышение точности местоположения ПРИ за счет учета погрешностей измерения антенными элементами пунктов приема параметров сигналов контролируемых источников радиоизлучения и корректировки погрешности измерения разности фаз антенными парами при расчете пеленгов ИРИ. Этим достигается сформулированная цель - разработка способа определения местоположения источника радиоизлучения, обеспечивающего повышение точности местоположения обнаруженного ИРИ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2258941C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2011 |
|
RU2476900C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2296341C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2008 |
|
RU2370824C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2283505C1 |
| МУЛЬТИПЛИКАТИВНЫЙ РАЗНОСТНО-ОТНОСИТЕЛЬНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ИМПУЛЬСНОГО РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2558640C2 |
| ДИХОТОМИЧЕСКИЙ МУЛЬТИПЛИКАТИВНЫЙ РАЗНОСТНО-ОТНОСИТЕЛЬНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ИМПУЛЬСНОГО РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2562613C2 |
| МУЛЬТИПЛИКАТИВНЫЙ РАЗНОСТНО-ОТНОСИТЕЛЬНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ИМПУЛЬСНОГО РАДИОИЗЛУЧЕНИЯ | 2017 |
|
RU2647495C1 |
| Способ одноэтапного адаптивного определения координат источников радиоизлучений | 2021 |
|
RU2768011C1 |
| ОДНОПОЗИЦИОННЫЙ КОРРЕЛЯЦИОННЫЙ МУЛЬТИПЛИКАТИВНЫЙ РАЗНОСТНО-ОТНОСИТЕЛЬНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2017 |
|
RU2651796C1 |
Изобретение относится к области радиотехники - к системам радиопеленгации и может быть использовано для определения местоположения источников радиоизлучения (ИРИ) путем сопоставления в одной системе координат двух и более найденных направлений на обнаруженный источник радиоизлучения. Достигаемым техническим результатом изобретения является повышение точности определения местоположения обнаруженного ИРИ за счет использования при вычислениях поправочных коэффициентов усредненной систематической погрешности и коэффициентов достоверности измерения разностей фаз антенными парами пунктов приема, определяемых по результатам анализа сигналов от эталонных источников радиоизлучения на пунктах приема. Сущность изобретения заключается в том, что для каждого пункта приема, принявшего радиосигнал с заданным качеством, по рассчитанным минимальным нормированным значениям суммарных погрешностей разности фаз вычисляют пеленги на источник радиоизлучения и рассчитывают средневзвешенное значение координат местоположения источника радиоизлучения по всем точкам пересечения линий пеленгов с учетом рассчитанных поправочных коэффициентов. 5 ил.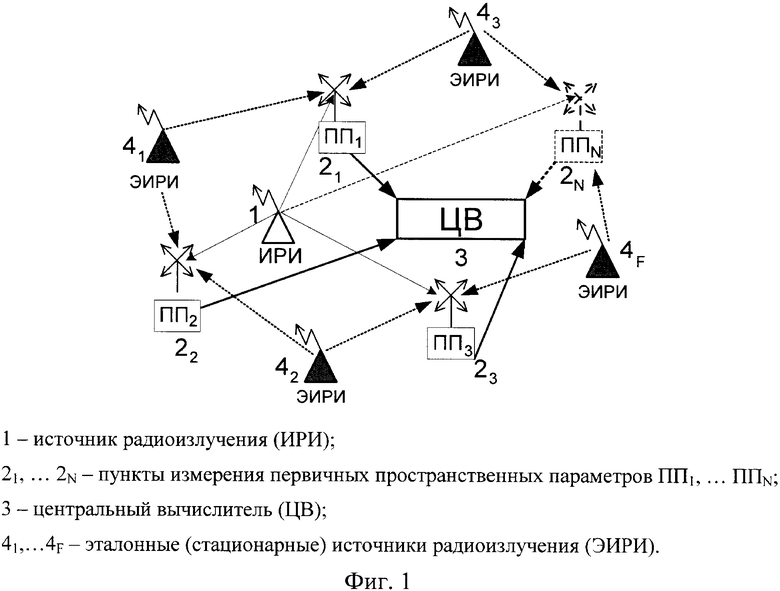
Способ определения местоположения контролируемого источника радиоизлучения, заключающийся в том, что предварительно задают пороговое (Uс-Uш)пор и нормирующее (Uс-Uш)норм значения разностей уровней сигнала Uc и шума Uш в месте установки каждого i-го пункта приема, где i=1,2...,N, N≥2 - общее число идентичных пунктов приема, каждый из которых снабжен антенной решеткой, состоящей из К≥2 пар антенных элементов, измеряют на каждом i-м пункте приема в течение времени контроля за источником радиоизлучения уровень шумов Uшi, а в интервале времени Δt - амплитуду и фазу обнаруженного и принятого сигнала контролируемого источника радиоизлучения каждым антенным элементом, вычисляют усредненное значение уровня сигнала Uci и разность фаз Δϕik для каждой k-й пары антенных элементов i-го пункта приема, запоминают частоту сигнала источника радиоизлучения, затем на каждом i-м пункте приема формируют пакеты данных, содержащие информацию о частоте принятого сигнала, уровне шума, усредненном значении уровня сигнала, а также разности фаз для каждой пары антенных элементов и передают пакеты данных по каналам связи на центральный вычислитель, где вычисляют по информации каждого пакета данных разности уровней сигнала и шума и сравнивают их с пороговым значением (Uс-Uш)пор, затем вычисляют пеленги на контролируемый источник излучения, для чего из всей совокупности принятых на центральном вычислителе пакетов данных выделяют N* пакетов, для которых вычисленные разности уровней сигнала и шума превышают пороговое значение, после чего для j-го, где j=1,...,N*, пункта приема последовательно с предварительно заданным шагом Δα в интервале от 0 до 360°, задают гипотетическое значение пеленга αj на обнаруженный контролируемый источник радиоизлучения и для каждого αj вычисляют соответствующую ему разность фаз для всех пар антенных элементов и разность между рассчитанными  и ранее измеренными
и ранее измеренными  разностями фаз для соответствующей пары антенных элементов, после чего вычисляют суммарную погрешность Sj(αj) путем суммирования вычисленных разностей и запоминают ее, из всех запомненных Sj(αj) выбирают максимальную, на которую нормируют все запомненные суммарные погрешности, из числа нормированных суммарных погрешностей Sj H выбирают минимальную Sj H min, а соответствующее ей значение гипотетического азимута αj принимают за искомое значение пеленга на контролируемый источник радиоизлучения для j-го пункта приема, затем вычисляют местоположение контролируемого источника радиоизлучения, для чего рассчитывают координаты точек пересечения лучей найденных N* пеленгов от каждого пункта приема и для каждой точки пересечения лучей вычисляют весовой коэффициент, рассчитывают средневзвешенное значение координат местоположения контролируемого источника радиоизлучения по всем точкам пересечения линий пеленгов, после чего корректируют рассчитанные координаты местоположения контролируемого источника радиоизлучения с помощью поисковой итерационной процедуры наискорейшего спуска, отличающийся тем, что в зоне контроля в точках с известными координатами устанавливают дополнительно F≥2 эталонных источников радиоизлучения, излучающих в том же диапазоне частот, что и контролируемый источник радиоизлучения, для каждой k-й пары антенных элементов i-го пункта приема рассчитывают и запоминают величину эталонной разности фаз
разностями фаз для соответствующей пары антенных элементов, после чего вычисляют суммарную погрешность Sj(αj) путем суммирования вычисленных разностей и запоминают ее, из всех запомненных Sj(αj) выбирают максимальную, на которую нормируют все запомненные суммарные погрешности, из числа нормированных суммарных погрешностей Sj H выбирают минимальную Sj H min, а соответствующее ей значение гипотетического азимута αj принимают за искомое значение пеленга на контролируемый источник радиоизлучения для j-го пункта приема, затем вычисляют местоположение контролируемого источника радиоизлучения, для чего рассчитывают координаты точек пересечения лучей найденных N* пеленгов от каждого пункта приема и для каждой точки пересечения лучей вычисляют весовой коэффициент, рассчитывают средневзвешенное значение координат местоположения контролируемого источника радиоизлучения по всем точкам пересечения линий пеленгов, после чего корректируют рассчитанные координаты местоположения контролируемого источника радиоизлучения с помощью поисковой итерационной процедуры наискорейшего спуска, отличающийся тем, что в зоне контроля в точках с известными координатами устанавливают дополнительно F≥2 эталонных источников радиоизлучения, излучающих в том же диапазоне частот, что и контролируемый источник радиоизлучения, для каждой k-й пары антенных элементов i-го пункта приема рассчитывают и запоминают величину эталонной разности фаз  на f-й, где f=1,...F, эталонный источник радиоизлучения, дополнительно на каждом i-м пункте приема от эталонных источников радиоизлучения в пределах заданного интервала времени Т zmin раз принимают сигналы и затем выполняют над ними такие же действия, как и над сигналами, принятыми от контролируемого источника радиоизлучения, а в формируемые на каждом пункте приема пакеты дополнительно включают данные об идентификационном признаке эталонного источника радиоизлучения, об усредненном значении уровня принятого сигнала и разности фаз
на f-й, где f=1,...F, эталонный источник радиоизлучения, дополнительно на каждом i-м пункте приема от эталонных источников радиоизлучения в пределах заданного интервала времени Т zmin раз принимают сигналы и затем выполняют над ними такие же действия, как и над сигналами, принятыми от контролируемого источника радиоизлучения, а в формируемые на каждом пункте приема пакеты дополнительно включают данные об идентификационном признаке эталонного источника радиоизлучения, об усредненном значении уровня принятого сигнала и разности фаз  для каждой k-й пары антенных элементов антенной решетки i-го пункта приема, причем после приема на центральном вычислителе сформированных на пунктах приема пакетов данных из них выделяют пакеты, содержащие данные о сигналах от эталонных источников радиоизлучения, выделяют идентификационный признак i-го пункта приема, передавшего этот пакет данных, данные о разностях фаз
для каждой k-й пары антенных элементов антенной решетки i-го пункта приема, причем после приема на центральном вычислителе сформированных на пунктах приема пакетов данных из них выделяют пакеты, содержащие данные о сигналах от эталонных источников радиоизлучения, выделяют идентификационный признак i-го пункта приема, передавшего этот пакет данных, данные о разностях фаз  и времени их вычисления, zmin раз принятые данные запоминают и затем для zmin запомненных данных за последний интервал времени, в течение которого они были приняты, вычисляют коэффициент усредненной систематической ошибки Рki, а также для z=1,2,...zmin величины отклонения
и времени их вычисления, zmin раз принятые данные запоминают и затем для zmin запомненных данных за последний интервал времени, в течение которого они были приняты, вычисляют коэффициент усредненной систематической ошибки Рki, а также для z=1,2,...zmin величины отклонения  измеренной от f-го эталонного источника радиоизлучения разности фаз
измеренной от f-го эталонного источника радиоизлучения разности фаз  на k-й антенной паре i-го приемного пункта, от ранее вычисленной эталонной величины
на k-й антенной паре i-го приемного пункта, от ранее вычисленной эталонной величины  значение функции достоверности текущего измерения разности фаз
значение функции достоверности текущего измерения разности фаз  и коэффициент достоверности измерений Dki k-й антенной парой соответственно по формулам
и коэффициент достоверности измерений Dki k-й антенной парой соответственно по формулам

причем каждый раз после приема (zmin+1)-го пакета, содержащего данные о сигналах от эталонного источника радиоизлучения, его запоминают в массиве данных, а ранее запомненный пакет z=1- пакет исключают из массива, при этом значения 

 и Dki, вычисляют для новой совокупности Z=1,2,...,zmin данных, причем суммарную погрешность Sj(αj) вычисляют с учетом рассчитанных значений Рki и Dki по формулам:
и Dki, вычисляют для новой совокупности Z=1,2,...,zmin данных, причем суммарную погрешность Sj(αj) вычисляют с учетом рассчитанных значений Рki и Dki по формулам:

а координаты контролируемого источника радиоизлучения для j-го приемного пункта рассчитывают с учетом уточненных значений Sj(αj) и 
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2258941C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2283505C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2263328C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2263928C1 |
| US 6163297 А, 19.12.2000 | |||
| US 2005105600 А1, 19.05.2005 | |||
| ЕР 1601989 А0, 07.12.2005. | |||

