Изобретение относится к радиотехнике и может быть использовано в многоканальных моноимпульсных обнаружителях-пеленгаторах (ОП) систем радиомониторинга для определения местоположения источника радиоизлучения (ИРИ).
На практике широкое распространение получили многопозиционные измерительные комплексы, позволяющие реализовать классические методы пассивной радиолокации: угломерный (триангуляционный) и разностно-дальномерный методы. Использование разностно-дальномерных методов не получило широкого распространения ввиду необходимости наличия в системе радиоконтроля (РК) каналов связи с большой пропускной способностью для ретрансляции сигналов в аналоговом или цифровом видах с периферийных приемных пунктов на центральный пункт обработки. Кроме того, средства связи излучают относительно узкополосный сигнал, что не позволяет измерять координаты ИРИ с точностью более высокой, чем это делают пеленгационные комплексы [Дубровин А.В. Одноэтапные процедуры и пассивные системы определения координат источников радиоизлучений. Автореферат диссертации на соискание ученой степени доктора технических наук. Москва, 2007 год].
Классические решения задачи местоопределения представлены в [В.С. Черняк. Многопозиционная радиолокация, - М. Радио и связь, 1993], [В.С. Кондратьев, А.Ф. Котов, Л.Н. Марков. Многопозиционные радиотехнические системы. - М. Радио и связь, 1986. - 264 с.]. Триангуляционный способ определения координат основан на измерении пеленгов на источник радиоизлучения с нескольких ОП, размещенных в различных точках пространства. В частном случае, при пеленговании двумя устройствами оценкой координат является точка пересечения лучей.
Анализ данного способа определения координат позволяет сделать вывод, что способ основан на использовании допущения о возможности аппроксимации ошибок пеленгования гауссовским законом. В общем случае данное допущение предполагает игнорирование следующих основных положений:
- принимаемая обнаружителем-пеленгатором аддитивная смесь сигнала ИРИ и шума может быть аппроксимирована гауссовским законом; при этом оценка пеленга, будучи полученной в результате нелинейного преобразования принимаемых сигналов, не подчиняется гауссовскому закону;
- математическая корректность гауссовской аппроксимации пеленга ограничена тем, что пеленг на ИРИ определен на конечном интервале значений [0, 2π], а гауссовская величина определена на всей бесконечной оси;
- гауссовский закон полностью определяется первым начальным и вторым центральным моментами и не предполагает наличие аномальных ошибок пеленгования; вероятность последних при прочих равных параметрах зависит от отношения сигнал/шум, в результате - степень адекватности гауссовской аппроксимации зависит от уровней принимаемых сигналов.
Известен способ определения координат местоположения источников радиоизлучения [Ю.Г. Булычев, В.Ю. Булычев, В.Н. Вернигора, С.С. Ивакина, А.А. Мозоль, И.Г. Насенков, О.Н. Неплюев. Адаптивный способ пассивной радиолокации. Патент РФ № 2593149, G01S 3/46] используемый в двух- и многопозиционных измерительных комплексах. Способ заключается в измерении с приемных позиций двухпозиционного измерительного комплекса угловых координат и мощности излучения ИРИ, определении временной задержки прихода волнового фронта излучения ИРИ на позиции комплекса. Далее применяют параллельно триангуляционный, угломерно-разностно-дальномерный и угломерно-мощностной методы для определения координат местоопределения ИРИ. Для каждого из методов определяют значение дисперсии дальности до ИРИ, затем сравнивают эти значения и выбирают те значения координат местоположения ИРИ, которые соответствуют наименьшему значению дисперсии. При равных значениях дисперсии используют правило нахождения среднего арифметического для значений одноименных координат, получаемых двумя или тремя методами.
Известен способ обнаружения и определения местоположения наземных источников радиоизлучения [Уфаев В.А., Уфаев Д.В. Способ обнаружения и определения местоположения источника радиоизлучения. Патент РФ № 2263928, G01S 5/04] включающий прием радиоизлучения источника в  пространственно разнесенных пунктах, передачу информации на центральный пункт, определение расстояния
пространственно разнесенных пунктах, передачу информации на центральный пункт, определение расстояния  от каждой точки пространства
от каждой точки пространства  до каждого
до каждого  пункта приема измерение в них эффективных значений напряжения принятых радиосигналов
пункта приема измерение в них эффективных значений напряжения принятых радиосигналов  , передачу их на центральный пункт, где преобразуют их в функцию пространственной неопределенности
, передачу их на центральный пункт, где преобразуют их в функцию пространственной неопределенности  , по положению и значению максимума которой определяют наличие излучения и местоположения источника. Значение и положение максимума функции пространственной неопределённости оценивают в окрестности точки с координатами, равными средневзвешенными координатам пунктов приема с весами, равными измеренным эффективным значениям напряжения принятых радиосигналов в степени
, по положению и значению максимума которой определяют наличие излучения и местоположения источника. Значение и положение максимума функции пространственной неопределённости оценивают в окрестности точки с координатами, равными средневзвешенными координатам пунктов приема с весами, равными измеренным эффективным значениям напряжения принятых радиосигналов в степени  . Параметр p определяют исходя из зависимости от расстояния напряженности электрического поля, создаваемого источником радиоизлучения.
. Параметр p определяют исходя из зависимости от расстояния напряженности электрического поля, создаваемого источником радиоизлучения.
Известен способ определения местоположения радиосигналов [Уфаев В.А., Чубов Е.А., Козьмин В.А., Рембовский Ю.А. Способ определения местоположения радиопередатчика мобильной станцией радиоконтроля. Патент РФ № 2307372, G01S 5/02], включающий следующие операции:
1. Измерение в процессе движения, с помощью навигационной системы, курсового угла и собственных координат мобильной станции радиоконтроля  , где
, где  - номер периода измерений, N - общее число периодов измерений.
- номер периода измерений, N - общее число периодов измерений.
2. Прием радиосигналов с помощью антенн и приемных устройств пеленгатора.
3. Измерение пеленга  на источник радиосигнала по зависимости фазы принятого радиоизлучения от расстояния, как угла между опорным направлением
на источник радиосигнала по зависимости фазы принятого радиоизлучения от расстояния, как угла между опорным направлением  и направлением
и направлением  на радиопередатчик с учетом курсового угла и с привязкой к опорному направлению
на радиопередатчик с учетом курсового угла и с привязкой к опорному направлению
 .
.
4. Расчет пеленга  относительно места нахождения мобильной станции радиоконтроля на каждую точку пространства, задаваемую с шагом квантования возможных значений координат радиопередатчика, по формуле
относительно места нахождения мобильной станции радиоконтроля на каждую точку пространства, задаваемую с шагом квантования возможных значений координат радиопередатчика, по формуле
 ,
,
где - пеленг из места нахождения станции  на каждую точку пространства, после чего выполняют определение и накопление по совокупности всех периодов измерения для каждой точки пространства разности измеренных и расчетных значений пеленга, а также, после не менее двух периодов измерений, определение дисперсии разностей измеренных и расчетных значений пеленга для каждой точки пространства.
на каждую точку пространства, после чего выполняют определение и накопление по совокупности всех периодов измерения для каждой точки пространства разности измеренных и расчетных значений пеленга, а также, после не менее двух периодов измерений, определение дисперсии разностей измеренных и расчетных значений пеленга для каждой точки пространства.
5. Измерение амплитуды  (одновременно с измерением пеленга на радиопередатчик) принятого радиоизлучения радиопередатчика.
(одновременно с измерением пеленга на радиопередатчик) принятого радиоизлучения радиопередатчика.
6. Нормирование амплитуды принятого радиосигнала на квадрат расстояния от каждой точки пространства до места нахождения мобильной станции радиоконтроля и накопление по совокупности всех периодов измерений,


 - квадрат расстояния от мобильной станции радиоконтроля до точки пространства.
- квадрат расстояния от мобильной станции радиоконтроля до точки пространства.
7. Определение дисперсии нормированных значений амплитуды для каждой точки пространства и умножение на дисперсию разности измеренных и расчетных значений пеленга
 ,
,
 ,
,  - соответственно результаты накопления разности измеренных и расчетных значений пеленга на предшествующем (N-1) и текущем (N) периоде измерения для точки пространства с координатами (x,y).
- соответственно результаты накопления разности измеренных и расчетных значений пеленга на предшествующем (N-1) и текущем (N) периоде измерения для точки пространства с координатами (x,y).
8. Определение дисперсии разностей измеренных и расчетных значений пеленга
 .
.
9. Определение дисперсии нормированных значений амплитуды

10. Получение функции пространственной неопределенности вида
 .
.
11. Определение местоположения радиопередатчика как положение минимума этого произведения дисперсий по совокупности всех точек пространства
 .
.
12. При поступлении данных очередного измерения указанные операции циклически повторяют, таким образом, в процессе движения мобильной станции радиоконтроля непрерывно уточняют местоположение радиопередатчика.
Наиболее близким по технической сущности к предлагаемому является способ определения местоположения источника радиоизлучения переносным обнаружителем-пеленгатором [В.А. Козьмин, Ю.А. Рембовский, В.А. Уфаев, Д.В. Уфаев, патент РФ № 2405166, G01S 5/02], принятый за прототип.
Способ-прототип включает следующие операции:
1. Формирование (предварительное) диаграммы направленности (ДН) антенной решетки (АР)  в рабочем диапазоне частот (
в рабочем диапазоне частот ( , M - количество обнаружителей-пеленгаторов).
, M - количество обнаружителей-пеленгаторов).
2. Прием сигналов во временной области (одновременно попадающих в текущую полосу приема и анализа) с выходов всех антенн АР в пространственных каналах обнаружителей-пеленгаторах, синхронный перенос на более низкую частоту, синхронное преобразование сигналов во временной области в цифровую форму, вычисление отсчетов быстрого преобразования Фурье каждой оцифрованной реализации в каждом пространственном канале ОП.
3. Определение пеленга для каждого возможного местоположения передатчика, определяемого допустимой линейной ошибкой местоопределения, с учетом курсового угла  пеленгатора и его координат
пеленгатора и его координат  , по формуле:
, по формуле:
 , (1)
, (1)
где  - собственные координаты переносного пеленгатора;
- собственные координаты переносного пеленгатора;
 - координаты возможного местоположения передатчика.
- координаты возможного местоположения передатчика.
4. Формирование решающей функции (пространственного спектра) способа определения координат передатчика переносным пеленгатором (далее по тексту - решающая функция определения координат способа-прототипа) по формуле:
 , (2)
, (2)
где  определяется путем перемножения значений принятых сигналов и значений диаграмм направленности антенн в направлении передатчика и имеет вид:
определяется путем перемножения значений принятых сигналов и значений диаграмм направленности антенн в направлении передатчика и имеет вид:  ,
,

 - расчетные набеги фаз принятых радиосигналов в местах расположения антенн,
- расчетные набеги фаз принятых радиосигналов в местах расположения антенн,
 - длина волны излучения,
- длина волны излучения,
 - координаты антенн в местной полярной системе координат, соответственно
- координаты антенн в местной полярной системе координат, соответственно  - удаление от центра антенного блока,
- удаление от центра антенного блока,  - угол относительного его оси. Накопление решающей функции определения координат способа-прототипа за все время движения переносного пеленгатора с весами, пропорциональными расчетному ослаблению радиосигналов передатчика при распространении их до переносного пеленгатора,
- угол относительного его оси. Накопление решающей функции определения координат способа-прототипа за все время движения переносного пеленгатора с весами, пропорциональными расчетному ослаблению радиосигналов передатчика при распространении их до переносного пеленгатора,
 , (3)
, (3)
где  - коэффициент ослабления в зоне прямой видимости, обратно пропорциональный квадрату расстояния между пеленгатором и передатчиком,
- коэффициент ослабления в зоне прямой видимости, обратно пропорциональный квадрату расстояния между пеленгатором и передатчиком,  .
.
5. Определение весовых коэффициентов
 (4)
(4)
и среднего квадратичного значения этих весовых коэффициентов
 (5)
(5)
6. Нормирование результатов накопления решающей функции определения координат способа-прототипа на среднее квадратичное значение весовых коэффициентов с получением усредненной решающей функции определения координат способа-прототипа
 . (6)
. (6)
7. Определение положения максимума усредненной решающей функции определения координат способа-прототипа (6) как оценка местоположения передатчика в N-й момент наблюдения.
8. При поступлении данных очередного измерения указанные операции циклически повторяют, таким образом, в процессе движения переносного пеленгатора непрерывно уточняют местоположения передатчика.
Следует отметить, что способ-прототип предполагает предварительное, до начала измерений, определение диаграммы направленности антенн пеленгатора для измерения распределения уровня радиоизлучения передатчика в пространстве; весовые коэффициенты определяют умножением соответствующих весов на значение диаграмм направленности антенн в направлении передатчика. Таким способом, авторы предполагают устранение аномальных погрешностей измерения координат передатчика. При реализации способа-прототипа в качестве обнаружителя-пеленгатора используется переносной пеленгатор с тремя антеннами типа скрещенные рамки и штырь.
Основными недостатками всех перечисленных способов являются:
1. Способы местоопределения, в части пеленгования, не учитывают наличие межканальной корреляции спектральных отсчетов временных реализаций, обусловленных наличием в реальных условиях приема радиосигналов внешних помех.
2. Способы не адаптивны в случае АР с произвольной структурой и характеристиками направленности антенных элементов. Это не позволяет использовать способы-аналоги в реальных условиях функционирования обнаружителей-пеленгаторов, когда имеют место взаимные влияния антенн друг на друга.
3. Координатный рельеф классического триангуляционного способа определения координат зависит от значения средней квадратической ошибки (СКО) в каждой точке пеленгования. Следует отметить, что значение СКО пеленгования, как правило, является интегральным показателем инструментальной точности пеленгования и не характеризует частотную, азимутальную и (или) угломестную зависимость точности пеленгования. При конечных отношениях сигнал/шум при уровнях принимаемых радиосигналов, сопоставимых с уровнем чувствительности ОП, будет иметь место дополнительная флуктуационная составляющая СКО пеленгования. Поэтому использование указанной в документации на ОП СКО пеленгования целесообразно лишь с целью определения первичной оценки координат ИРИ, используемой в дальнейшем в качестве точки начального приближения при уточнении координат ИРИ в пределах окрестности данной точки. Размеры окрестности определяются достижимой точностью определения координат ИРИ, исходя из взаимной конфигурации ОП и ИРИ, а также из требуемой вероятности попадания истинных координат ИРИ в пределы окрестности.
4. При размещении пеленгаторов на различных расстояниях от источника радиоизлучения имеют место различные коэффициенты затухания радиоволн на трассах распространения и коэффициенты усиления излучаемого сигнала в направлении на пеленгаторы. В связи с этим, ошибки пеленгования источника каждым из пеленгаторов будут различными, что не учитывается в способе-прототипе и аналогах.
5. При вычислении оценочных координат ИРИ известные способы не предполагают проведение оценки достоверности результатов местоопределения, что приводит к повышению вероятности принятия неправильного решения.
Задачей, на решение которой направлено предлагаемое техническое решение, является повышение точности и достоверности определения координат источников радиоизлучения по результатам их многопозиционного пеленгования в условиях априорной неопределенности относительно уровней сигналов, излучаемых в направлении на пеленгаторы, и величин ошибок пеленгования.
Для решения поставленной задачи в способе одноэтапного адаптивного определения координат источников радиоизлучений (ИРИ) заключающемся в предварительном формировании диаграммы направленности антенной решетки в рабочем диапазоне частот каждого m-ого обнаружителя-пеленгатора (ОП), , M - количество обнаружителей-пеленгаторов, приеме сигналов во временной области (одновременно попадающих в текущую полосу приема и анализа) с выходов всех антенн антенной решетки (АР) в пространственных каналах ОП, синхронном переносе на более низкую частоту, синхронном преобразовании сигналов во временной области в цифровую форму, вычислении отсчетов быстрого преобразования Фурье каждой оцифрованной реализации в каждом пространственном канале ОП, определении пеленга для каждого возможного местоположения передатчика, определяемого допустимой линейной ошибкой местоопределения, с учетом курсового угла пеленгатора, формировании решающей функции способа определения координат ИРИ, определении положения максимума решающей функции способа определения координат ИРИ, циклическом повторении указанных операций при поступлении данных очередного измерения, согласно изобретению, формируют решающую функцию пеленгования  (пеленгационного рельефа) по всем возможным направлениям прихода радиоволны для каждого m-го ОП и для каждого i-го обнаруженного сигнала на частоте
(пеленгационного рельефа) по всем возможным направлениям прихода радиоволны для каждого m-го ОП и для каждого i-го обнаруженного сигнала на частоте  по формуле:
по формуле:

 - векторная комплексная диаграмма направленности антенной решетки m-го обнаружителя-пеленгатора,
- векторная комплексная диаграмма направленности антенной решетки m-го обнаружителя-пеленгатора,
 - матрица коэффициентов корреляции аддитивного шума i-го ИРИ,
- матрица коэффициентов корреляции аддитивного шума i-го ИРИ,
 - обратная матрица,
- обратная матрица,
 - матрица взаимных энергий сигналов, «накопленная» по серии из
- матрица взаимных энергий сигналов, «накопленная» по серии из  измерений,
измерений,
вычисляют максимальные значения  решающей функции пеленгования
решающей функции пеленгования  для каждого i-го обнаруженного сигнала на частоте по возможным азимутальным направлениям прихода радиоволны, вычисляют направления прихода радиоволны для каждого i-го обнаруженного сигнала на частоте по формуле
для каждого i-го обнаруженного сигнала на частоте по возможным азимутальным направлениям прихода радиоволны, вычисляют направления прихода радиоволны для каждого i-го обнаруженного сигнала на частоте по формуле  ,
,
формируют решающую функцию способа определения координат (координатный рельеф) для i-го ИРИ  на частоте с азимутальных направлений
на частоте с азимутальных направлений  по формуле
по формуле  , где
, где  - типовое значение средней квадратической ошибки пеленгования m-го ОП, оценивают координаты
- типовое значение средней квадратической ошибки пеленгования m-го ОП, оценивают координаты  i-го источника радиоизлучения по формуле
i-го источника радиоизлучения по формуле  , определяют эллипс ошибок координат местоположения ИРИ с центром в точке
, определяют эллипс ошибок координат местоположения ИРИ с центром в точке  оценочных координат ИРИ, с ориентацией и полуосями, определяемыми требуемой вероятностью
оценочных координат ИРИ, с ориентацией и полуосями, определяемыми требуемой вероятностью  попадания истинных координат ИРИ
попадания истинных координат ИРИ  в пределы эллипса по формуле
в пределы эллипса по формуле
 ,
,
где число k определяет размеры эллипсоида в соответствии с равенством:
 ,
,
 - матрица корреляции оценок координат ИРИ триангуляционным способом,
- матрица корреляции оценок координат ИРИ триангуляционным способом,
 - матрица производных измеренных пеленгов по координатам ИРИ x и y с элементами
- матрица производных измеренных пеленгов по координатам ИРИ x и y с элементами  ,
,  ,
,
 - оценочные координаты местоположения ИРИ,
- оценочные координаты местоположения ИРИ,
 - диагональная матрица корреляции оценок пеленгов на ИРИ,
- диагональная матрица корреляции оценок пеленгов на ИРИ,
 ,
,  - среднеквадратические ошибки измерения пеленгов в опорных точках,
- среднеквадратические ошибки измерения пеленгов в опорных точках,
 - дальность от m-го ОП до точки оценочных координат i-го ИРИ,
- дальность от m-го ОП до точки оценочных координат i-го ИРИ,
формируют решающую функцию способа адаптивного определения координат (координатного рельефа) для i-го ИРИ  на частоте в пределах эллипса ошибок по формуле
на частоте в пределах эллипса ошибок по формуле  , азимутальные направления
, азимутальные направления  на источник радиоизлучения, лежащие в пределах эллипса ошибок, определяют по формуле:
на источник радиоизлучения, лежащие в пределах эллипса ошибок, определяют по формуле:  , вычисляют уточненные координаты
, вычисляют уточненные координаты  i-го источника радиоизлучения на частоте по формуле
i-го источника радиоизлучения на частоте по формуле  , где
, где  , L - область значений координат внутри эллипса ошибок координат местоположения i-го ИРИ, оценивают достоверность результатов определения координат i-го ИРИ, полученных способом адаптивного определения координат, согласно неравенству:
, L - область значений координат внутри эллипса ошибок координат местоположения i-го ИРИ, оценивают достоверность результатов определения координат i-го ИРИ, полученных способом адаптивного определения координат, согласно неравенству:
где h - порог, выбираемый согласно критерию Неймана-Пирсона,  , в случае выполнения неравенства результат определения координат считается достоверным, в противном случае - результат отбраковывается и не используется в последующей обработке.
, в случае выполнения неравенства результат определения координат считается достоверным, в противном случае - результат отбраковывается и не используется в последующей обработке.
Для осуществления предлагаемого способа одноэтапного адаптивного определения координат источников радиоизлучений, обнаружители-пеленгаторы размещают на различных позициях на местности, определяют курсовой угол каждого m-го обнаружителя-пеленгатора,  - количество позиций пеленгования. Предварительно измеряют комплексные амплитуды напряжений на выходах всех антенных элементов (АЭ) антенной решетки (АР) и формируют векторную комплексную диаграмму направленности (ВКДН) АР каждого ОП. Далее каждый m-й обнаружитель-пеленгатор осуществляет синхронный прием сигналов и последующее преобразование их в цифровую форму. Формируется решающая функция пеленгования - пеленгационный рельеф
- количество позиций пеленгования. Предварительно измеряют комплексные амплитуды напряжений на выходах всех антенных элементов (АЭ) антенной решетки (АР) и формируют векторную комплексную диаграмму направленности (ВКДН) АР каждого ОП. Далее каждый m-й обнаружитель-пеленгатор осуществляет синхронный прием сигналов и последующее преобразование их в цифровую форму. Формируется решающая функция пеленгования - пеленгационный рельеф  для каждого m-го обнаружителя-пеленгатора, которая справедлива в случае АР с произвольной структурой и характеристиками направленности антенных элементов и учитывает наличие межканальной корреляции сигналов и взаимного влияния в АР.
для каждого m-го обнаружителя-пеленгатора, которая справедлива в случае АР с произвольной структурой и характеристиками направленности антенных элементов и учитывает наличие межканальной корреляции сигналов и взаимного влияния в АР.
Азимутальное направление  на источник радиоизлучения находят путем максимизации решающей функции пеленгования по всем возможным направлениям прихода радиоволны для каждого m-го ОП. Координаты
на источник радиоизлучения находят путем максимизации решающей функции пеленгования по всем возможным направлениям прихода радиоволны для каждого m-го ОП. Координаты  i-го источника радиоизлучения находят триангуляционным способом, как аргумент глобального минимума решающей функции триангуляционного способа определения координат - координатного рельефа
i-го источника радиоизлучения находят триангуляционным способом, как аргумент глобального минимума решающей функции триангуляционного способа определения координат - координатного рельефа  . Координатный рельеф
. Координатный рельеф  зависит от значения СКО пеленгования каждого m-го ОП, в качестве которого используется типовое значение СКО, заданное в документации на ОП. В этом случае предварительной оценки СКО пеленгования не требуется.
зависит от значения СКО пеленгования каждого m-го ОП, в качестве которого используется типовое значение СКО, заданное в документации на ОП. В этом случае предварительной оценки СКО пеленгования не требуется.
Для увеличения точности нахождения координат ИРИ, в виду того, что истинные значения СКО пеленгования не известны, координаты ИРИ подлежат дополнительному уточнению. В заявляемом способе предлагается определить эллипс ошибок координат местоположения i-го ИРИ с центром в точке  найденных триангуляционным способом оценок координат, с ориентацией и полуосями, которые определяются матрицей
найденных триангуляционным способом оценок координат, с ориентацией и полуосями, которые определяются матрицей  корреляции оценок координат ИРИ и требуемой вероятностью
корреляции оценок координат ИРИ и требуемой вероятностью  попадания истинных координат ИРИ
попадания истинных координат ИРИ  в пределы эллипса. Уточненные координаты
в пределы эллипса. Уточненные координаты  ИРИ находятся путем максимизации решающей функции способа адаптивного определения координат - координатного рельефа на частоте в пределах эллипса ошибок. Для поиска минимума функции n действительных переменных можно использовать любой из широко известных методов, например, изложенный в [Банди Б. М. Методы оптимизации. Вводный курс: Пер. с англ. - М.: Радио и связь, 1998. - 128 с.]
ИРИ находятся путем максимизации решающей функции способа адаптивного определения координат - координатного рельефа на частоте в пределах эллипса ошибок. Для поиска минимума функции n действительных переменных можно использовать любой из широко известных методов, например, изложенный в [Банди Б. М. Методы оптимизации. Вводный курс: Пер. с англ. - М.: Радио и связь, 1998. - 128 с.]
Полученные результаты местоопределения ИРИ подвергаются проверке на «достоверность», что обеспечивает повышение точности и достоверности местоопределения ИРИ в реальных условиях за счет соответствующей селекции результатов местоопределения.
Предлагаемый способ одноэтапного адаптивного определения координат источников радиоизлучений включает выполнение следующих процедур:
1. Формирование (предварительное) ВКДН АР с произвольными структурой и характеристиками направленности антенных элементов  каждого m-го обнаружителя-пеленгатора в рабочем диапазоне частот (, M - количество обнаружителей-пеленгаторов).
каждого m-го обнаружителя-пеленгатора в рабочем диапазоне частот (, M - количество обнаружителей-пеленгаторов).
2. Для каждого m-го обнаружителя-пеленгатора многократный последовательный во времени синхронный прием сигналов во временной области (одновременно попадающих в текущую полосу приема и анализа) с выходов всех антенн АР в пространственных каналах ОП, синхронный перенос на более низкую частоту, синхронное преобразование сигналов во временной области в цифровую форму, вычисление отсчетов быстрого преобразования Фурье каждой оцифрованной реализации в каждом пространственном канале ОП.
3. По каждому спектральному отсчету вычисление канальных и взаимных (межканальных) энергий быстрого преобразования Фурье и накопление энергий путем суммирования их значений, вычисленных по каждому принятому сигналу i-го ИРИ, и формирование нормированной матрицы  взаимных энергий, равной произведению
взаимных энергий, равной произведению  накопленной матрицы
накопленной матрицы  взаимных энергий и матрицы
взаимных энергий и матрицы  , обратной к матрице коэффициентов корреляции
, обратной к матрице коэффициентов корреляции  аддитивного шума.
аддитивного шума.
- матрица взаимных энергий сигналов, «накопленная» по серии из измерений:
 , (7)
, (7)
где  - вектор комплексных отсчетов (с порядковым номером
- вектор комплексных отсчетов (с порядковым номером  ,
, ) быстрого преобразования Фурье i-го радиосигнала, измеренного в к-й временной реализации:
) быстрого преобразования Фурье i-го радиосигнала, измеренного в к-й временной реализации:
 ,
,
где  - комплексная амплитуда напряженности электрического поля i-го радиосигнала;
- комплексная амплитуда напряженности электрического поля i-го радиосигнала;
- векторная комплексная диаграмма направленности антенной решетки m-го обнаружителя-пеленгатора,
 - азимут направления на источник излучения;
- азимут направления на источник излучения;
 - вектор аддитивного шума;
- вектор аддитивного шума;
k=1…К - порядковый номер принятого сигнала во временной области;
4. Формирование решающей функции пеленгования (пеленгационного рельефа) по всем возможным направлениям прихода радиоволны каждого m-го ОП для каждого i-го обнаруженного сигнала на частоте с учетом межканальной корреляции спектральных отсчетов сигнала и курсового угла обнаружителя-пеленгатора по формуле:
(8)
5. Вычисление максимального значения решающей функции пеленгования для каждого i-го обнаруженного сигнала на частоте по возможным азимутальным направлениям прихода радиоволны
 . (9)
. (9)
6. Оценивание направления прихода радиоволны для каждого i-го обнаруженного сигнала на частоте по формуле
 . (10)
. (10)
7. Формирование решающей функции триангуляционного способа определения координат (координатного рельефа) для i-го ИРИ на частоте с азимутальных направлений по формуле:
(11)
8. Оценка координат i-го источника радиоизлучения триангуляционным способом определения координат по формуле:
(12)
где - типовое значение СКО пеленгования m-го ОП, ,
,
M - количество ОП. Типовое значение СКО определяется из документации на ОП.
9. Определение эллипса ошибок координат местоположения i-го ИРИ с центром в точке  оценочных координат, с ориентацией и полуосями, которые определяются матрицей корреляции оценок координат ИРИ и требуемой вероятностью попадания истинных координат ИРИ
оценочных координат, с ориентацией и полуосями, которые определяются матрицей корреляции оценок координат ИРИ и требуемой вероятностью попадания истинных координат ИРИ  в пределы эллипса.
в пределы эллипса.
Вероятность попадания истинных координат ИРИ  в пределы эллипса определяется формулой:
в пределы эллипса определяется формулой:
 (13)
(13)
где число k определяет размеры эллипсоида в соответствии с равенством:
,
- матрица корреляции оценок координат i-го ИРИ триангуляционным способом:
(14)
- матрица производных измеренных пеленгов по координатам i-го ИРИ с элементами
 ,
,  ;
;
 - порядковый номер ОП;
- порядковый номер ОП;
- оценочные координаты местоположения ИРИ;
- диагональная матрица корреляции оценок пеленгов на ИРИ;
- дальность от m-го ОП до точки оценочных координат i-го ИРИ.
10. Формирование решающей функции способа адаптивного определения координат (координатного рельефа) для i-го ИРИ на частоте в пределах эллипса ошибок по формуле
 (15)
(15)
 - азимутальные направления на ИРИ, находящиеся в пределах эллипса ошибок,
- азимутальные направления на ИРИ, находящиеся в пределах эллипса ошибок,
где .
11. Уточнение координат i-го источника радиоизлучения на частоте по формуле:
, (16)
, L - область значений координат внутри эллипса ошибок координат местоположения i-го ИРИ.
12 Оценка достоверности результатов определения координат i-го ИРИ, согласно неравенству:
(17)
где h - порог, выбираемый согласно критерию Неймана-Пирсона, . В случае выполнения неравенства результат определения координат считается достоверным, в противном случае - результат отбраковывается и не используется в последующей обработке.
Предлагаемый способ одноэтапного адаптивного определения координат источников радиоизлучений лишен перечисленных выше недостатков существующих аналогов и прототипа, а именно:
1. Предлагаемый способ позволяет преодолеть априорную неопределенность относительно интенсивности шума и текущих ошибок пеленгования. Решающая статистика способа учитывает различия в уровнях принимаемых сигналов от ИРИ каждым обнаружителем-пеленгатором, интенсивность аддитивного шума, частотную и пространственную зависимость характеристик направленности антенной системы обнаружителя-пеленгатора.
2. Заявляемый способ учитывает наличие межканальной корреляции, обусловленных наличием в реальных условиях внешних помех, что позволяет при разработке обнаружителей-пеленгаторов проводить анализ достижимых показателей эффективности пеленгования сигналов ИРИ в условиях насыщенной электромагнитной обстановки.
3. Выполняемая в предлагаемом способе оценка «достоверности» результатов местоопределения ИРИ обеспечивает необходимую селекцию результатов по показателю достоверности, в результате чего повышается точность и достоверность местоопределения ИРИ в реальных условиях.
4. Предлагаемый способ справедлив в случае АР с произвольной структурой и характеристиками направленности антенных элементов. Это позволяет использовать способ в реальных условиях функционирования обнаружителей-пеленгаторов, когда имеют место взаимные влияния антенн друг на друга.
5. Предлагаемый способ позволяет оптимизировать поиск максимума координатного рельефа с целью снижения вычислительных затрат и повышения быстродействия подсистемы радиомониторинга.
Так же следует отметить, что классический триангуляционный способ определения координат является частным случаем предлагаемого способа и справедлив при следующих предположениях:
- интенсивности шума радиоприемных трактов ОП известны;
- отношение сигнал/шум достаточно велико, что ошибки пеленгования можно считать сосредоточенными в окрестности функции неопределенности, в которой справедлива ее квадратичная аппроксимация.
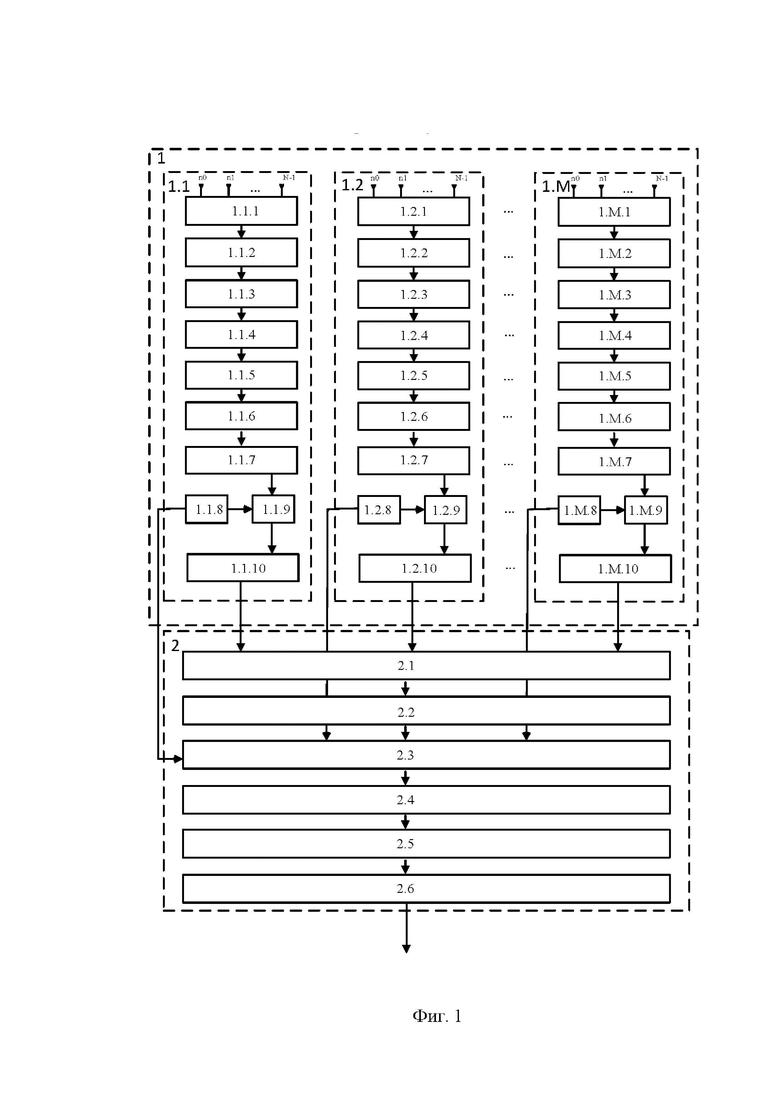
Схема устройства для реализации предлагаемого способа одноэтапного адаптивного определения координат источников радиоизлучений представлена на фиг. 1, где обозначено:
1 - система из M обнаружителей-пеленгаторов (ОП);
1.1, 1.2,…1.M - обнаружители-пеленгаторы;
1.1.1…1.M.1 - блок многократного многоканального приема временных реализаций и переноса на более низкую частоту;
1.1.2…1.M.2 - блок оцифровки временных реализаций;
1.1.3…1.M.3 - блок вычисления преобразования Фурье временных реализаций;
1.1.4…1.M.4 - блок вычисления канальных и взаимных спектров;
1.1.5…1.M.5 - блок накопления матриц взаимных энергий;
1.1.6…1.M.6 - блок обнаружения спектральных компонент сигналов ИРИ;
1.1.7…1.M.7 - блок отождествления спектральных компонент по принадлежности к сигналу одного источника радиоизлучения;
1.1.8…1.M.8 - блок предварительного формирования ВКДН АР ОП;
1.1.9…1.M.9 - блок формирования значений решающей функции пеленгования;
1.1.10…1.M.10 - блок оценки азимутального направления ИРИ;
2 - блок совместной обработки данных и измерения координат ИРИ;
2.1 - блок формирования решающей функции триангуляционного способа определения координат;
2.2 - блок оценки координат источника радиоизлучения, полученных триангуляционным способом;
2.3 - блок построения эллипса ошибок определения координат ИРИ;
2.4 - блок формирования решающей функции адаптивного способа определения координат в пределах эллипса ошибок определения координат ИРИ;
2.5 - блок оценки координат источника радиоизлучения в пределах эллипса ошибок;
2.6 - блок оценки достоверности результатов определения координат ИРИ.
Устройство содержит последовательно соединенные систему из M обнаружителей-пеленгаторов 1 и блока совместной обработки данных и измерения координат ИРИ 2. Обнаружители-пеленгаторы 1.1…1.М идентичны, каждый из которых состоит из последовательно соединенных блока многократного многоканального приема временных реализаций и переноса на более низкую частоту 1.1.1, блок оцифровки временных реализаций 1.1.2, блок вычисления преобразования Фурье временных реализаций 1.1.3, блок вычисления канальных и взаимных спектров 1.1.4, блок накопления матриц взаимных энергий 1.1.5, блок обнаружения спектральных компонент сигналов ИРИ 1.1.6, блок отождествления спектральных компонент по принадлежности к сигналу одного источника радиоизлучения 1.1.7, блок формирования решающей функции пеленгования 1.1.9 и блок оценки азимутального направления ИРИ 1.1.10. выход которого является выходом обнаружителя-пеленгатора 1.1. Входы обнаружителей-пеленгаторов 1.1.1…1.М.1 подключены к соответствующим антенным элементам антенной решетки. Выходы блоков 1.1.10…1.М.10 являются выходами системы 1 и соединены с соответствующими входами блока совместной обработки данных и измерения координат ИРИ 2.
Блок 2 содержит последовательно соединенные блок формирования решающей функции триангуляционного способа определения координат 2.1, блок оценки координат источника радиоизлучения 2.2, блок построения эллипса ошибок определения координат ИРИ 2.3, блок формирования решающей функции адаптивного способа определения координат в пределах эллипса ошибок определения координат ИРИ 2.4, блок оценки координат источника радиоизлучения в пределах эллипса ошибок 2.5 блок оценки достоверности результатов определения координат ИРИ 2.6, выход которого является выходом устройства. Кроме того, первый выход блока предварительного формирования ВКДН АР ОП 1.1.8 соединен со вторым входом блока 1.1.9. Вторые выходы блоков предварительного формирования ВКДН АР ОП 1.1.8…1.1.М соединены с соответствующими входами со второго по М-й блока построения эллипса ошибок определения координат ИРИ 2.3.
Устройство для реализации заявляемого способа работает следующим образом.
Система 1 осуществляет обнаружение-пеленгование ИРИ и содержит М обнаружителей-пеленгаторов (, M - количество обнаружителей-пеленгаторов). Каждый m-й ОП выполняет одинаковую последовательность действий. Блок 1.1.1 осуществляет многократный, последовательный во времени синхронный (когерентный) прием временных реализаций с выходов всех антенн АР в пространственных каналах обнаружителя-пеленгатора и когерентный перенос на более низкую частоту. Затем блок 1.1.2 синхронно преобразует принятые временные реализации в цифровую форму. В блоке 1.1.3 для каждой оцифрованной реализации в каждом пространственном канале обнаружителя-пеленгатора происходит вычисление отсчетов преобразования Фурье  . По каждому из анализируемой пары спектральных отчетов преобразования Фурье с помощью блока 1.1.4 выполняется вычисление действительных канальных
. По каждому из анализируемой пары спектральных отчетов преобразования Фурье с помощью блока 1.1.4 выполняется вычисление действительных канальных  и комплексных взаимных энергий
и комплексных взаимных энергий  .
.
По результатам вычисления блока 1.1.4 в блоке 1.1.5 происходит накопление для каждой пары спектральных отчетов по каждой из принятых временных реализаций канальных и взаимных энергий спектральных компонент путем суммирования их значений, вычисленных по каждой из принятых временных реализаций  .
.
В блоке 1.1.6 адаптивного пространственно-многоканального обнаружения спектральных компонент сигналов формируется нормированная матрица взаимных энергий, по результатам которой одновременно вычисляются суммы диагональных элементов квадрата нормированной матрицы и квадрат суммы диагональных элементов нормированной матрицы, результаты вычислений подставляются в формулу решающей статистики [Артемов М.Л., Афанасьев О.В., Абрамова Е.Л. Сличенко М.П. Способ адаптивного пространственно-многоканального обнаружения спектральных компонент сигналов источников радиоизлучения. Патент РФ № 2696022 G01S 5/04] и далее сравнивают решающую статистику с порогом, выбираемым по критерию Неймана-Пирсона. В случае превышения порога в блоке 1.1.7 спектральные компоненты отождествляются по принадлежности к сигналу одного источника радиоизлучения путем формирования нормированной матрицы взаимных энергий, по результатам которой одновременно вычисляются суммы диагональных элементов и произведения сумм диагональных элементов, результаты которых подставляются в решающую статистику, которая сравнивается с порогом, выбираемым по критерию Неймана-Пирсона [Артемов М.Л., Афанасьев О.В., Абрамова Е.Л. Коненков Е.А., Сличенко М.П. Способ адаптивного отождествления спектральных компонент по принадлежности к сигналу одного источника радиоизлучения. Патент РФ № 2696093 G01S 5/04].
В блоке 1.1.8 предварительно формируется ВКДН АР  для каждого обнаруженного сигнала в рабочем диапазоне частот. По результатам вычислений в блоке 1.1.9 формируются значения решающей функции пеленгования для каждого обнаруженного сигнала на частоте с различных азимутальных направлений, с учетом межканальной корреляции спектральных отсчетов временных реализаций по формуле (8).
для каждого обнаруженного сигнала в рабочем диапазоне частот. По результатам вычислений в блоке 1.1.9 формируются значения решающей функции пеленгования для каждого обнаруженного сигнала на частоте с различных азимутальных направлений, с учетом межканальной корреляции спектральных отсчетов временных реализаций по формуле (8).
 (8)
(8)
В блоке 1.1.10 вычисляют максимальное значения решающей функции пеленгования  каждого обнаруженного сигнала на частоте по возможным направлениям прихода радиоволны по формуле (10).
каждого обнаруженного сигнала на частоте по возможным направлениям прихода радиоволны по формуле (10).
. (10)
В блоке 2.1 по результатам вычислений блока 1.1.10 формируется решающая функция триангуляционного способа определения координат для i-го ИРИ  на частоте по формуле (11)
на частоте по формуле (11)
 , (11)
, (11)
после чего в блоке 2.2 оцениваются координаты  i-го источника радиоизлучения по формуле (12)
i-го источника радиоизлучения по формуле (12)
 . (12)
. (12)
Далее в блоке 2.3 вычисляются параметры и границы эллипса ошибок координат местоположения i-го ИРИ по формулам (13), (14).
В блоке 2.4 формируют решающую функцию способа адаптивного определения координат для i-го ИРИ на частоте пределах эллипса ошибок по формуле (15):
 . (15)
. (15)
В блоке 2.5 определяют координаты  i-го источника радиоизлучения на частоте по формуле (16):
i-го источника радиоизлучения на частоте по формуле (16):
 , (16)
, (16)
По результатам вычислений в блоке 2.6 проводят оценку достоверности результатов определения координат i-го ИРИ, включающую проверку выполнение неравенства
 (17)
(17)
Результаты моделирования предлагаемого способа. В среде Mathcad 15.0 проводилось математическое моделирование классического триангуляционного способа определения координат, способа-прототипа определения координат и предлагаемого адаптивного одноэтапного способа определения координат источников радиоизлучений.
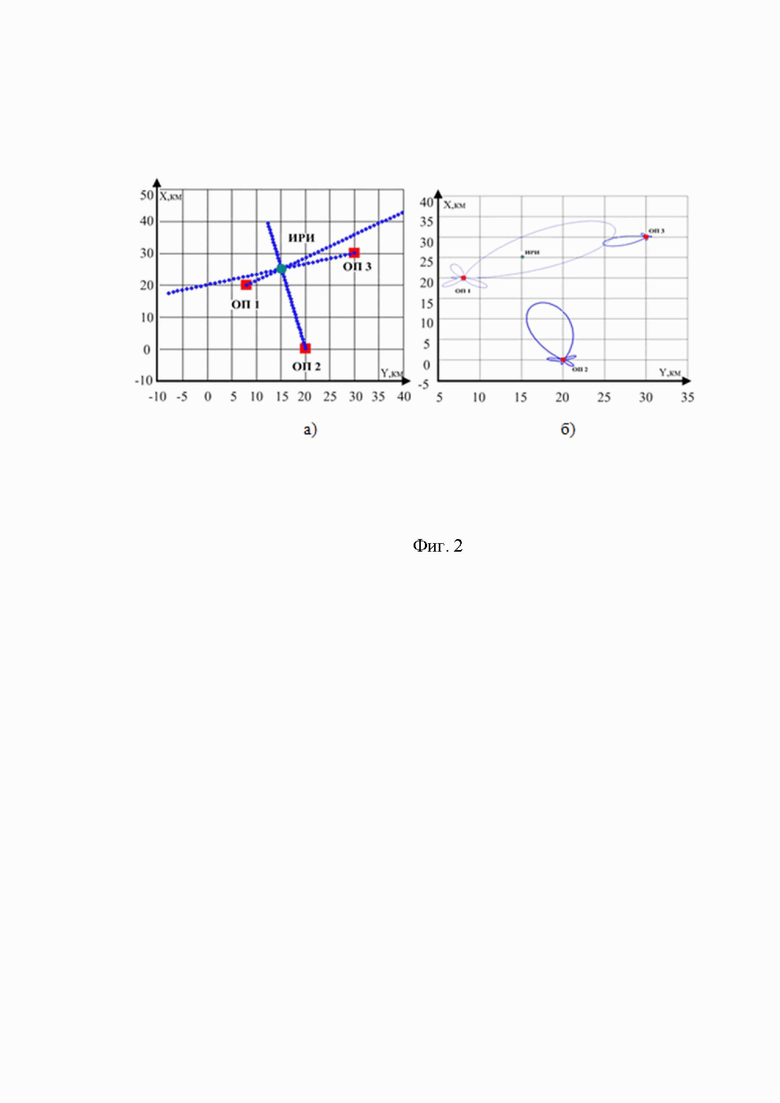
На фиг. 2 приведена иллюстрация принципов триангуляционного и предлагаемого способов в случае трех обнаружителей-пеленгаторов. Антенные системы пеленгаторов предполагались одинаковыми невзаимодействующими семиэлементными эквидистантными кольцевыми решетками; отношение радиуса решетки к длине радиоволны ИРИ составляло 1. Координаты пеленгаторов, км: (20, 8), (0, 20) и (30, 30); ИРИ, км - (25, 15). Фиг. 2 а соответствует классическому триангуляционному способу определения координат источника по результатам пеленгования; фиг. 2б - предлагаемому способу, учитывающему пеленгационный рельеф для каждого пеленгатора.
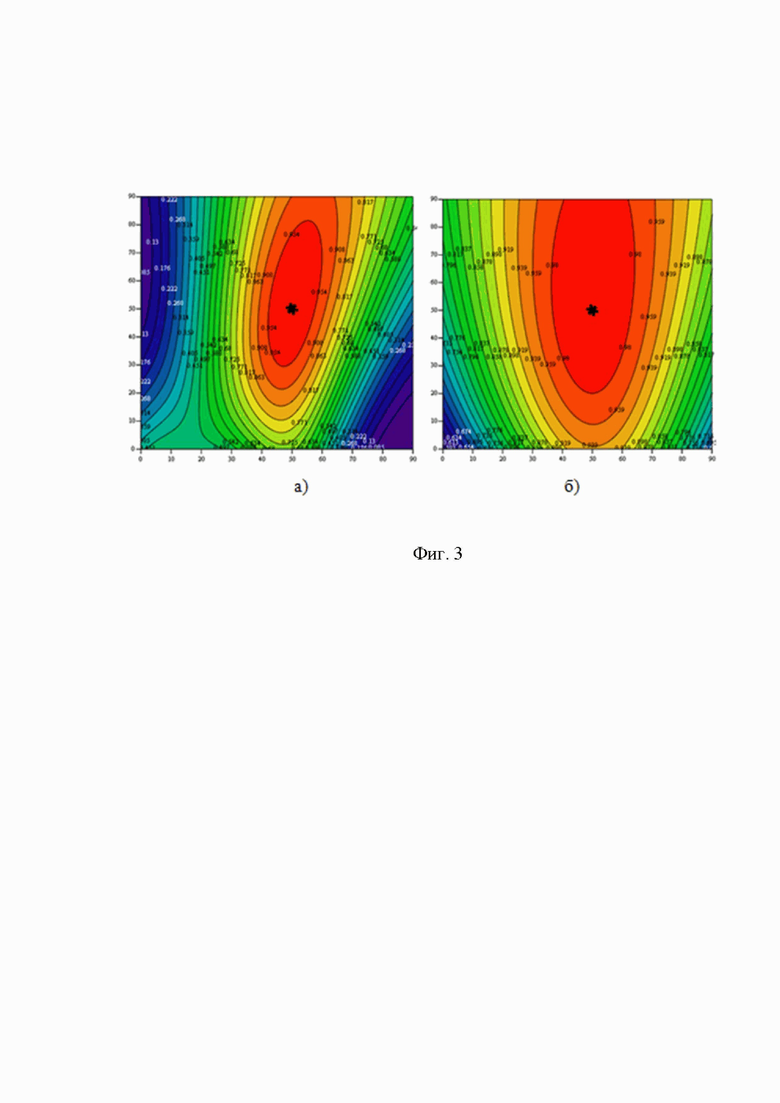
На фиг. 3 в качестве примера приведены линии постоянного уровня решающей функции триангуляционного и предлагаемого способов определения координат.
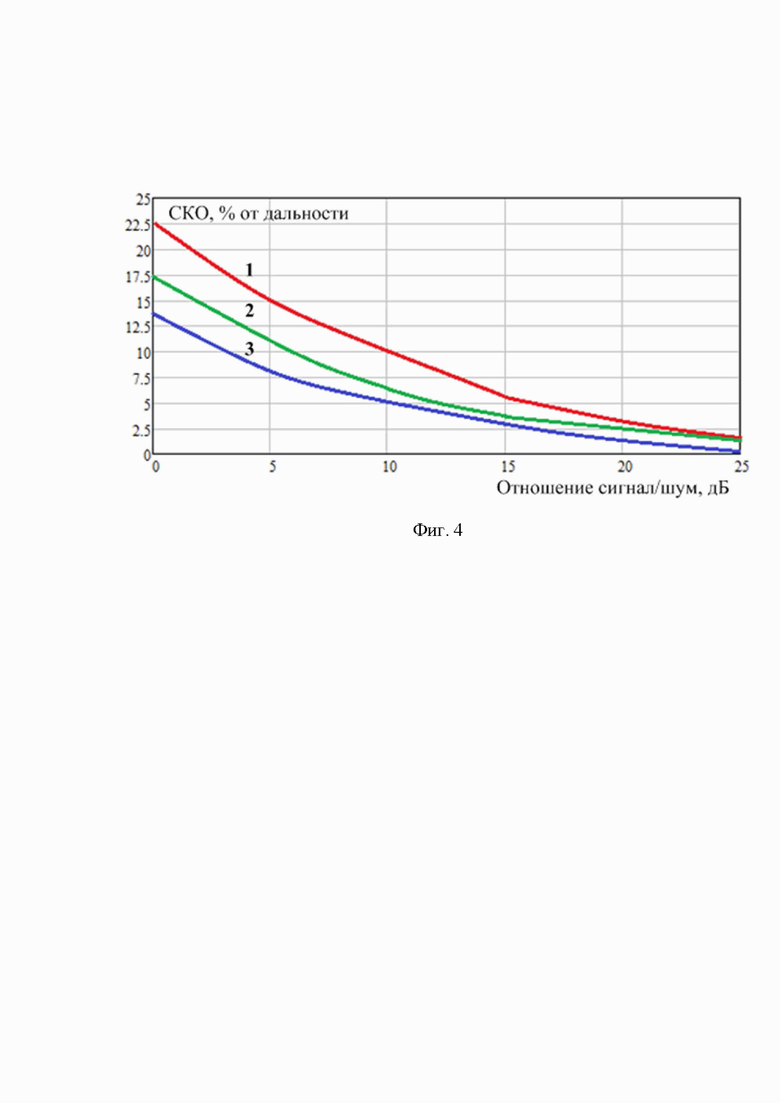
На фиг. 4 приведена относительная СКО определения координат ИРИ триангуляционным (кривая 1), способом-прототипом (кривая 2) и предлагаемым (кривая 3) способами для приведенной на фиг. 2 системы из трех пеленгаторов. По горизонтальной оси отложены значения отношения сигнал/шум, пересчитанные на вход радиоприёмного устройства наиболее дальнего до ИРИ второго пеленгатора. При моделировании уровни принимаемых сигналов первым и третьим пеленгатором превышали уровень сигнала, принимаемого третьим, на 20 и 13 дБ соответственно. Относительная ошибка рассчитывалась как СКО деленное на минимальную дальность от ИРИ до пеленгаторов (равную 8,7 км). Видно, что с ростом отношения сигнал/шум (ОСШ) отличие в точностях определения координат уменьшается; в пределе с ростом ОСШ характеристики способов совпадают. Адаптивный способ определения координат наземных ИРИ обеспечивает снижение СКО в 2…1,5 раза при отношении сигнал/шум 10..15 дБ.
В отличие от триангуляционного и способа-прототипа, предлагаемый способ основан на учете зависимости пеленгационных рельефов - откликов многоканальной антенной системы пеленгатора от местоположения источника. Ввиду того, что решающая функция пеленгования - пеленгационный рельеф, зависит от матрицы взаимных энергий принимаемых сигналов, то решающей функции адаптивного способа определения координат обеспечивает адаптивный к уровню принимаемых сигналов учет откликов пеленгаторов. Чем дальше расположен пеленгатор от источника, тем (при прочих равных условиях) меньше уровень принимаемого сигнала. Следовательно, пеленгование выполняется с большей ошибкой теми пеленгаторами, которые расположены дальше от источника. В таком случае целесообразно, чтобы вклад принятых пеленгаторами сигналов в решающую функцию способа определения координат был пропорционален уровню сигналов, что реализуется в предлагаемом способе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения и азимутального пеленгования наземных источников радиоизлучения с летно-подъемного средства | 2020 |
|
RU2732505C1 |
| Способ определения географических координат источников радиоизлучения в многоцелевой обстановке | 2021 |
|
RU2773307C1 |
| Способ пространственного отождествления пеленгов с наземными источниками радиоизлучения | 2020 |
|
RU2731682C1 |
| Способ комплексирования пеленга и координат источника радиоизлучения | 2022 |
|
RU2799498C1 |
| Способ повышения точности пеленгования источников радиоизлучения обнаружителем-пеленгатором с многошкальной антенной системой | 2019 |
|
RU2713235C1 |
| Угломерно-корреляционный способ определения местоположения наземных источников радиоизлучения | 2021 |
|
RU2764149C1 |
| Способ адаптивного пространственно-многоканального обнаружения и пеленгования двух частотно-неразделимых источников радиоизлучения | 2020 |
|
RU2732504C1 |
| Способ повышения точности и достоверности пеленгования при накоплении спектральных компонент сигналов источников радиоизлучения | 2019 |
|
RU2696094C1 |
| Способ двухмерного моноимпульсного пеленгования источников радиоизлучений | 2019 |
|
RU2696095C1 |
| ВРЕМЕННОЙ СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО СКАНИРУЮЩЕГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ БЕЗ ИЗМЕРЕНИЯ ПЕЛЕНГА | 2018 |
|
RU2704029C1 |
Изобретение относится к радиотехнике и может быть использовано в многоканальных моноимпульсных обнаружителях-пеленгаторах систем радиомониторинга для определения координат наземных и воздушных источников радиоизлучения (ИРИ), в том числе размещенных на беспилотных летательных аппаратах. Технический результат - повышение точности и достоверности определения координат источников радиоизлучения по результатам их многопозиционного пеленгования в условиях априорной неопределенности относительно величин ошибок пеленгования. Заявленный способ основан на определении глобального максимума решающей функции способа адаптивного определения координат - координатного рельефа, в пределах эллиптической доверительной области, содержащей истинные координаты ИРИ. Способ адаптивен к уровням принимаемых сигналов, параметрам взаимного расположения обнаружителей-пеленгаторов и ИРИ, ориентации антенной системы пеленгаторов в пространстве, а также априорно неизвестных в реальных условиях ошибок измерения пеленгов на ИРИ и интенсивности аддитивного гауссовского шума. Способ позволяет преодолеть априорную неопределенность, обеспечить повышение точности определения координат ИРИ и достоверности выявления приоритетных объектов радиоподавления в условиях насыщенной электромагнитной обстановки. 4 ил.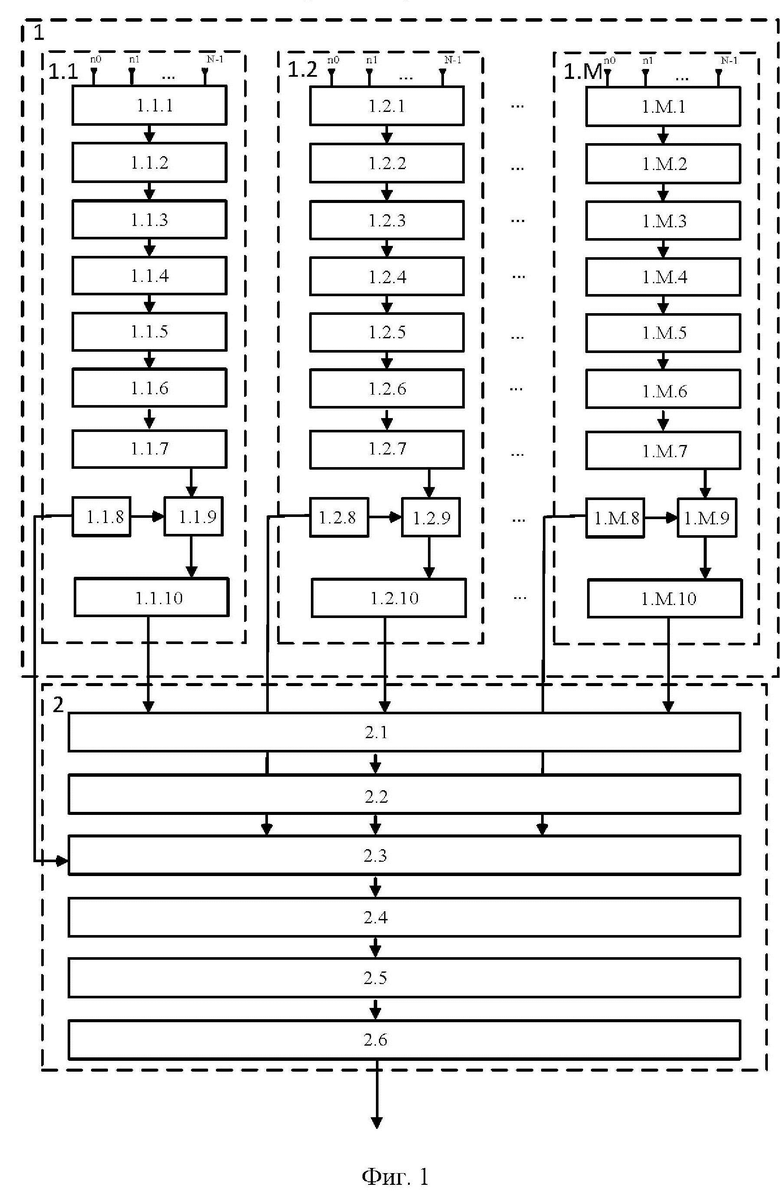
Способ одноэтапного адаптивного определения координат источников радиоизлучений (ИРИ) заключающийся в предварительном формировании диаграммы направленности антенной решетки  в рабочем диапазоне частот каждого m-ого обнаружителя-пеленгатора (ОП),
в рабочем диапазоне частот каждого m-ого обнаружителя-пеленгатора (ОП),  , M – количество обнаружителей-пеленгаторов, приеме сигналов во временной области (одновременно попадающих в текущую полосу приема и анализа) с выходов всех антенн антенной решетки (АР) в пространственных каналах ОП, синхронном переносе на более низкую частоту, синхронном преобразовании сигналов во временной области в цифровую форму, вычислении отсчетов быстрого преобразования Фурье каждой оцифрованной реализации в каждом пространственном канале ОП, определении пеленга для каждого возможного местоположения передатчика, определяемого допустимой линейной ошибкой местоопределения, с учетом курсового угла
, M – количество обнаружителей-пеленгаторов, приеме сигналов во временной области (одновременно попадающих в текущую полосу приема и анализа) с выходов всех антенн антенной решетки (АР) в пространственных каналах ОП, синхронном переносе на более низкую частоту, синхронном преобразовании сигналов во временной области в цифровую форму, вычислении отсчетов быстрого преобразования Фурье каждой оцифрованной реализации в каждом пространственном канале ОП, определении пеленга для каждого возможного местоположения передатчика, определяемого допустимой линейной ошибкой местоопределения, с учетом курсового угла  пеленгатора, формировании решающей функции способа определения координат ИРИ, определении положения максимума решающей функции способа определения координат ИРИ, циклическом повторении указанных операций при поступлении данных очередного измерения, отличающийся тем, что
пеленгатора, формировании решающей функции способа определения координат ИРИ, определении положения максимума решающей функции способа определения координат ИРИ, циклическом повторении указанных операций при поступлении данных очередного измерения, отличающийся тем, что
формируют решающую функцию пеленгования  (пеленгационного рельефа) по всем возможным направлениям прихода радиоволны для каждого m-го ОП и для каждого i-го обнаруженного сигнала на частоте
(пеленгационного рельефа) по всем возможным направлениям прихода радиоволны для каждого m-го ОП и для каждого i-го обнаруженного сигнала на частоте  по формуле:
по формуле:
 ,
,
 – векторная комплексная диаграмма направленности антенной решетки m-го обнаружителя-пеленгатора,
– векторная комплексная диаграмма направленности антенной решетки m-го обнаружителя-пеленгатора,
 – матрица коэффициентов корреляции аддитивного шума i-го ИРИ,
– матрица коэффициентов корреляции аддитивного шума i-го ИРИ,
 – обратная матрица,
– обратная матрица,
 – матрица взаимных энергий сигналов, «накопленная» по серии из
– матрица взаимных энергий сигналов, «накопленная» по серии из  измерений,
измерений,
вычисляют максимальные значения  решающей функции пеленгования
решающей функции пеленгования  для каждого i-го обнаруженного сигнала на частоте по возможным азимутальным направлениям прихода радиоволны, вычисляют направления прихода радиоволны для каждого i-го обнаруженного сигнала на частоте по формуле
для каждого i-го обнаруженного сигнала на частоте по возможным азимутальным направлениям прихода радиоволны, вычисляют направления прихода радиоволны для каждого i-го обнаруженного сигнала на частоте по формуле  ,
,
формируют решающую функцию способа определения координат (координатный рельеф) для i-го ИРИ  на частоте с азимутальных направлений
на частоте с азимутальных направлений  по формуле
по формуле  , где
, где  – типовое значение средней квадратической ошибки (СКО) пеленгования m-го ОП, оценивают координаты
– типовое значение средней квадратической ошибки (СКО) пеленгования m-го ОП, оценивают координаты  i-го источника радиоизлучения по формуле
i-го источника радиоизлучения по формуле  , определяют эллипс ошибок координат местоположения ИРИ с центром в точке
, определяют эллипс ошибок координат местоположения ИРИ с центром в точке  оценочных координат ИРИ, с ориентацией и полуосями, определяемыми требуемой вероятностью
оценочных координат ИРИ, с ориентацией и полуосями, определяемыми требуемой вероятностью  попадания истинных координат ИРИ
попадания истинных координат ИРИ  в пределы эллипса по формуле
в пределы эллипса по формуле
 ,
,
где число k определяет размеры эллипсоида в соответствии с равенством:
 ,
,
 – матрица корреляции оценок координат ИРИ триангуляционным способом,
– матрица корреляции оценок координат ИРИ триангуляционным способом,
 – матрица производных измеренных пеленгов по координатам ИРИ x и y с элементами
– матрица производных измеренных пеленгов по координатам ИРИ x и y с элементами  ,
,  ,
,
 – оценочные координаты местоположения ИРИ,
– оценочные координаты местоположения ИРИ,
 – диагональная матрица корреляции оценок пеленгов на ИРИ,
– диагональная матрица корреляции оценок пеленгов на ИРИ,
 ,
,  – среднеквадратические ошибки измерения пеленгов в опорных точках,
– среднеквадратические ошибки измерения пеленгов в опорных точках,
 – дальность от m-го ОП до точки оценочных координат i-го ИРИ,
– дальность от m-го ОП до точки оценочных координат i-го ИРИ,
формируют решающую функцию способа адаптивного определения координат (координатного рельефа) для i-го ИРИ  на частоте в пределах эллипса ошибок по формуле
на частоте в пределах эллипса ошибок по формуле  , азимутальные направления
, азимутальные направления  на источник радиоизлучения, лежащие в пределах эллипса ошибок, определяют по формуле:
на источник радиоизлучения, лежащие в пределах эллипса ошибок, определяют по формуле:  , вычисляют уточненные координаты
, вычисляют уточненные координаты  i-го источника радиоизлучения на частоте по формуле
i-го источника радиоизлучения на частоте по формуле  , где
, где  , L – область значений координат внутри эллипса ошибок координат местоположения i-го ИРИ, оценивают достоверность результатов определения координат i-го ИРИ, полученных способом адаптивного определения координат, согласно неравенству:
, L – область значений координат внутри эллипса ошибок координат местоположения i-го ИРИ, оценивают достоверность результатов определения координат i-го ИРИ, полученных способом адаптивного определения координат, согласно неравенству:
где h – порог, выбираемый согласно критерию Неймана-Пирсона,  , в случае выполнения неравенства результат определения координат считается достоверным, в противном случае – результат отбраковывается и не используется в последующей обработке.
, в случае выполнения неравенства результат определения координат считается достоверным, в противном случае – результат отбраковывается и не используется в последующей обработке.
| Способ обнаружения и азимутального пеленгования наземных источников радиоизлучения с летно-подъемного средства | 2020 |
|
RU2732505C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПЕРЕДАТЧИКА ПЕРЕНОСНЫМ ПЕЛЕНГАТОРОМ | 2009 |
|
RU2405166C2 |
| ОДНОЭТАПНЫЙ МЕТОД ПЕЛЕНГОВАНИЯ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ В ДКМВ ДИАПАЗОНЕ С ПРИМЕНЕНИЕМ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ, СОСТОЯЩЕЙ ИЗ ВЗАИМНО ОРТОГОНАЛЬНЫХ СИММЕТРИЧНЫХ ГОРИЗОНТАЛЬНЫХ ВИБРАТОРОВ | 2016 |
|
RU2614035C1 |
| АДАПТИВНЫЙ СПОСОБ ПАССИВНОЙ РАДИОЛОКАЦИИ | 2015 |
|
RU2593149C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2263928C1 |
| ГРЕШИЛОВ А.А | |||
| Способ определения интервальных оценок пеленгов и координат источника радиоизлучения // Инженерный журнал: наука и инновации | |||
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| URL: | |||

