Изобретение относится к механизации сельского хозяйства, а именно к погрузочным устройствам для прессованных тюков грубых кормов.
Известно грузозахватное устройство для погрузки и разгрузки тюков и рулонов грубых кормов Weiss Master [US PATENT NO. 5476356]. Устройство содержит раму, навеску, верхний и нижний захваты, сталкивающий механизм, гидроцилиндр привода, маслопровода с гидравлической арматурой. Нижний захват представляет собой неподвижный брус с девятью прямыми пальцами. Верхний захват шарнирно закреплен на раме и выполнен в виде захватной рамы с короткими пальцами.
Работа грузозахватного устройства заключается в следующем. Погрузчик подъезжает к боковой поверхности тюка, ориентирует грузозахватное устройство в горизонтальной и в вертикальной плоскостях и продолжает движение до полного вхождения пальцев нижнего захвата в прессованную массу. Затем посредством гидроцилиндра верхний захват опускается и его пальцы внедряются в верхнее основание тюка, предотвращая его сползание с пальцев нижнего захвата во время подъема и удержания. После погрузки с помощью гидроцилиндра отводится верхний захват и сталкивающий механизм сталкивает тюк с пальцев нижнего захвата.
Основными недостатками данного грузозахватного устройства являются:
1. Затрудненная ориентация грузозахватного устройства в вертикальной плоскости. Внедрение пальцев нижнего захвата осуществляется в движении и требует от оператора повышенного внимания, что приведет к увеличению времени погрузочного цикла и снижению производительности процесса. При неточном внедрении пальцев нижнего захвата существует риск ненадежного захвата тюка или повреждения обвязочного материала тюка, а при укладке и разборке штабеля риск повреждения соседних тюков.
2. Конструкция верхнего захвата, пальцы которого способны повредить обвязочный материал тюка, что может привести к его разрушению.
Прототипом предлагаемого грузозахватного устройства является устройство для погрузки, транспортировки и укладки в штабель крупногабаритных тюков и рулонов грубых кормов ПТ-Ф-500 [Сельскохозяйственная техника. Каталог в трех томах./ Под общ. ред. член-кор. ВАСХНИЛ В.И.Черноиванова. Том 1. Части I-II. - M.: Информагротех, 1991, - с.330].
Устройство содержит навеску, брус, верхний и нижний захваты с гидроцилиндрами, гидравлическую арматуру, маслопроводы. Основным рабочим органом являются захваты тюков, удерживающие их при погрузке и разгрузке. Они шарнирно закреплены на брусе и имеют четыре верхних и шесть нижних дугообразных пальцев, которые удерживают тюк или рулон благодаря усилию гидроцилиндров.
Устройство работает следующим образом. Погрузчик с грузозахватным устройством подъезжает к боковой поверхности тюка и производит ориентацию в горизонтальной и в вертикальной плоскостях. Штоки гидроцилиндров при этом находятся во втянутом положении. Затем подачей рабочей жидкости в подпоршневые полости гидроцилиндров верхний и нижний захваты приводятся в движение, а дугообразные пальцы начинают внедряться в материал груза. Нижний захват внедряется в боковую поверхность тюка, а верхний в верхнее основание тюка. После внедрения захватных органов тюк поднимается и транспортируется к месту разгрузки. Разгрузка осуществляется подачей рабочей жидкости в надпоршневые полости гидроцилиндров и выводом пальцев из прессованной массы.
К недостаткам прототипа можно отнести:
1. Отсутствие регулировок и, как следствие, неспособность данного грузозахватного устройства осуществлять погрузочные работы с тюками различных геометрических размеров.
2. При внедрении пальцев верхнего захвата в верхнее основание тюка существует риск повреждения обвязочного материала и потери тюком первоначальных свойств.
3. При работе с крупногабаритными тюками сена и соломы затруднена ориентация грузозахватного устройства в вертикальной плоскости. При неточной ориентации и неправильном захвате тюк может выскользнуть, деформироваться или будет повреждена обвязка, что приведет к его полному или частичному разрушению. Для правильной ориентации устройства оператор должен точно манипулировать стрелой погрузчика, что приведет к увеличению времени цикла, повышению утомляемости оператора и, как следствие, снижению производительности процесса.
4. Наличие двух гидроцилиндров усложняет конструкцию грузозахватного устройства и увеличивает затраты на его производство и эксплуатацию.
Технической задачей предлагаемого изобретения является обеспечение простой и точной ориентации грузозахватного устройства в горизонтальной и вертикальной плоскостях, обеспечение надежного удержания тюков различных геометрических размеров без повреждения обвязочного материала и привода захватного органа с помощью одного гидроцилиндра.
Решение технической задачи достигается в грузозахватном устройстве, содержащем навеску, брус, верхний захват и нижний захват, шарнирно закрепленный на брусе и имеющий гидроцилиндр и дугообразные пальцы, где согласно изобретению верхний захват выполнен в виде прижимной ориентирующей рамы с перемычками и вертикальными стойками, имеющими сквозные регулировочные отверстия, при этом вертикальные стойки закреплены на брусе посредством кронштейнов-направляющих с возможностью перемещения и фиксации в них.
В отличие от прототипа верхний захват представляет собой прижимную ориентирующую раму, которая обеспечивает оптимальную и легкую ориентацию рабочего органа относительно тюка, а также прижимает тюк, ограничивая его перемещение во время удержания, без внедрения в него; наличие регулировочных отверстий на вертикальных стойках верхнего захвата позволяет одинаково эффективно работать с тюками различных геометрических размеров; дугообразные пальцы расположены только на нижнем захвате; профиль пальцев соответствует дуге окружности с центром на оси вращения нижнего захвата, а их длина равна четверти этой окружности, такие параметры позволяют свести к минимуму повреждение прессованной массы и обвязочного материала; надежное удержание тюка при горизонтальном положении грузозахватного устройства обеспечивается наличием одного гидроцилиндра, который работает по схеме, где рабочий ход штока совершается за счет подачи рабочей жидкости в подпоршневую полость.
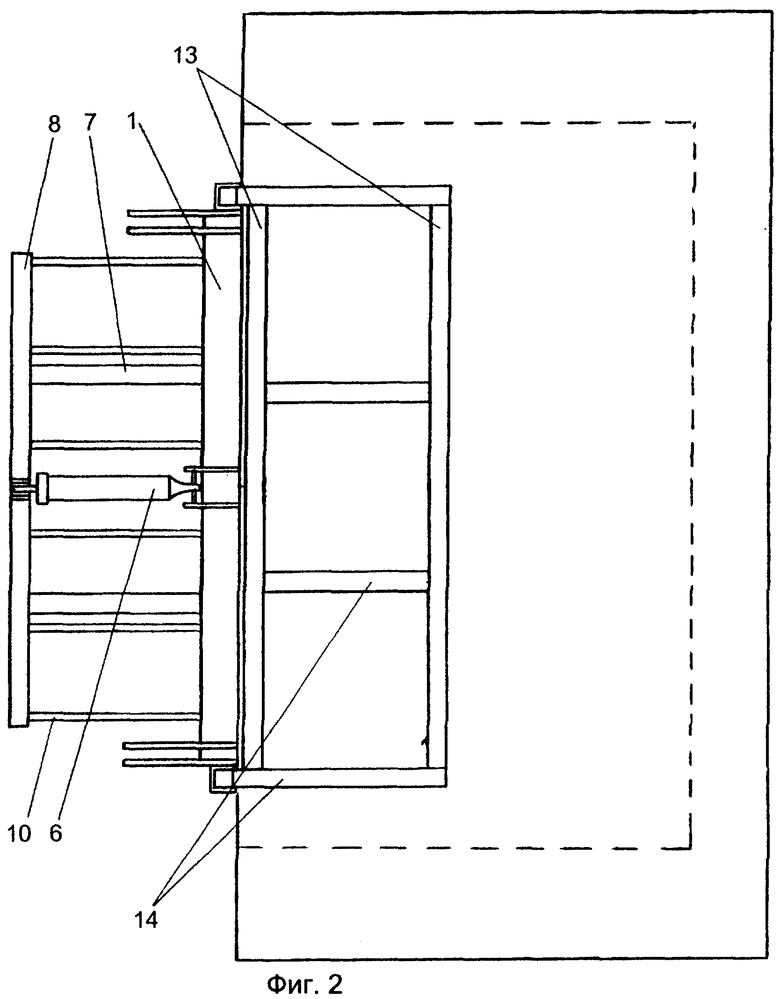
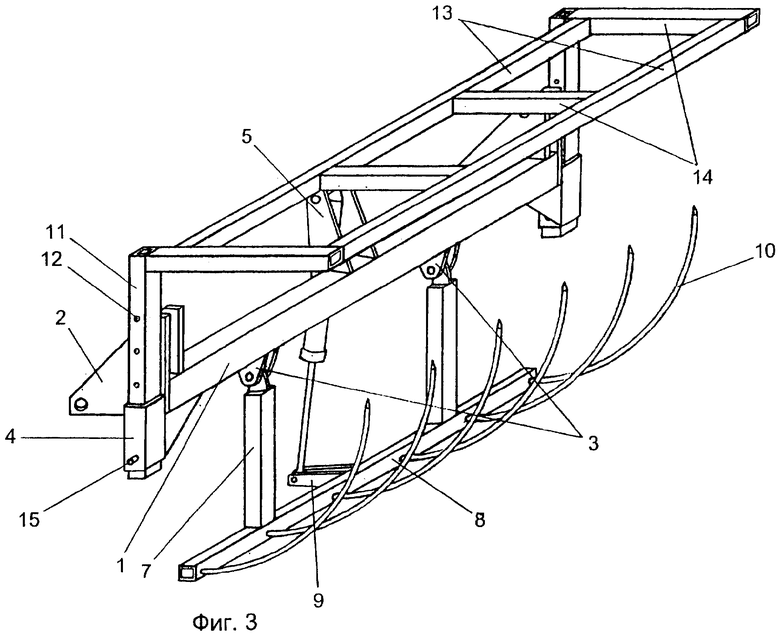
На фиг.1 и фиг.2 изображены схемы грузозахватного устройства в прямоугольных проекциях; на фиг.3 - схема грузозахватного устройства в аксонометрической проекции.
Грузозахватное устройство содержит брус 1 (фиг.2, фиг.3) с навеской 2 (фиг.1, фиг.3), кронштейны для крепления нижнего захвата 3 (фиг.3), кронштейны-направляющие для крепления верхнего захвата 4 (фиг.1, фиг.3) и кронштейны 5 (фиг.1, фиг.3) для крепления гидроцилиндра привода 6 (фиг.1, фиг.2). Нижний захват состоит из двух стоек 7 (фиг.1, фиг.2, фиг.3), с помощью которых он крепится к кронштейнам 3; перемычки 8 (фиг.2, фиг.3) с кронштейнами 9 (фиг.1, фиг.3) для крепления штока гидроцилиндра 6 и шестью дугообразными пальцами 10 (фиг.1, фиг.2, фиг.3), длина которых соответствует сектору окружности, равному четверти всей окружности. Верхний захват представляет собой прижимную ориентирующую раму, которая состоит двух вертикальных стоек 11 (фиг.1, фиг.3) со сквозными регулировочными отверстиями 12 (фиг.1, фиг.3), двух поперечных 13 и четырех продольных 14 перемычек (фиг.2, фиг.3). Верхний захват способен перемещаться в кронштейнах-направляющих 4 и фиксироваться в нужном положении при помощи пальцев 15 (фиг.3). Также грузозахватное устройство содержит маслопроводы и гидравлическую арматуру (не показано).
Устройство работает следующим образом. Перед началом погрузочных работ для оптимальной работы грузозахватного устройства его необходимо отрегулировать для данного размера тюка. Регулировка предполагает перемещение верхнего захвата в кронштейнах-направляющих 4 (фиг.1, фиг.3) и его фиксацию с помощью пальцев 15 (фиг.3). Такая конструкция позволяет легко ориентировать грузозахватное устройство в вертикальной плоскости и обеспечивает надежный захват тюков различных геометрических размеров.
При выходе из прессовальной камеры пресс-подборщика тюк располагается на поверхности поля на основании. Трактор с фронтальным погрузчиком ПФ-0,5; ПКУ-0,8 и грузозахватным устройством подъезжает к тюку, ориентирует его в горизонтальной плоскости и продолжает движение до касания брусом 1 (фиг.2, фиг.3) и вертикальными стойками 11 (фиг.1, фиг.3) боковой поверхности тюка. Затем оператор опускает стрелу погрузчика с грузозахватным устройством до касания поперечными 13 и продольными 14 перемычками верхнего захвата (фиг.2, фиг.3) верхнего основания тюка, таким образом происходит ориентация грузозахватного устройства в вертикальной плоскости. После этого включением соответствующего золотника гидрораспределителя рабочая жидкость подается в подпоршневую полость гидроцилиндра привода 6 (фиг.1, фиг.2). Шток гидроцилиндра начинает выдвигаться и поворачивать нижний захват в кронштейнах 3 (фиг.3). Пальцы 10 (фиг.1, фиг.2, фиг.3) нижнего захвата внедряются в свободную от обвязки боковую поверхность тюка по траектории, соответствующей дуге окружности, что позволяет оказать минимальное негативное воздействие на материал тюка. Подачу рабочей жидкости в подпоршневую полость гидроцилиндра 6 следует прекратить при полном внедрении пальцев 10 в боковую поверхность тюка. После захвата тюк поднимается стрелой погрузчика на необходимую высоту и транспортируется к месту разгрузки. Освобождение тюка производится путем подачи рабочей жидкости в надпоршневую полость гидроцилиндра привода, при этом нижний захват, двигаясь в обратном направлении, освобождает тюк от пальцев 10.
Устройство позволяет производить укладку тюков в транспортные средства и в штабель на хранение вплотную друг к другу, так как захват производится за верхнее основание и боковую поверхность тюка, не контактирующие с тюками, ранее уложенными в штабель.
Устройство позволяет использовать максимальную высоту подъема погрузчика, так как рабочие части устройства выводятся из груза собственным гидроцилиндром, а не стрелой погрузчика.
Устройство оказывает минимальное негативное воздействие на прессованную массу за счет внедрения пальцев в свободные от обвязки поверхности тюков по траектории, соответствующей дуге окружности.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2004 |
|
RU2265986C2 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2002 |
|
RU2217899C2 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2000 |
|
RU2173040C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1998 |
|
RU2137347C1 |
| ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ УПОРЯДОЧЕННОЙ УКЛАДКИ КРУПНОГАБАРИТНЫХ ПРЯМОУГОЛЬНЫХ ТЮКОВ РАСТИТЕЛЬНЫХ МАТЕРИАЛОВ | 2007 |
|
RU2354103C1 |
| РАЗРЕЗАЮЩЕЕ УСТРОЙСТВО ДЛЯ ПРЕССОВАННЫХ КОРМОВ | 2006 |
|
RU2318366C1 |
| РАЗРЕЗАЮЩЕЕ УСТРОЙСТВО ДЛЯ КРУПНОГАБАРИТНЫХ РУЛОНОВ | 2013 |
|
RU2552071C2 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2002 |
|
RU2225690C2 |
| ПОГРУЗЧИК ФРОНТАЛЬНЫЙ БЫСТРОМОНТИРУЕМЫЙ | 2005 |
|
RU2295850C1 |
| Погрузчик тюков сена и соломы Бруславцева В.Е. | 2019 |
|
RU2726425C1 |
Изобретение относится к сельскохозяйственному машиностроению и может быть использовано в погрузочных устройствах для прессованных тюков грубых кормов. Устройство содержит брус с навеской и кронштейны для крепления нижнего захвата. На брусе закреплены кронштейны-направляющие для крепления верхнего захвата и кронштейны для крепления гидроцилиндра привода нижнего захвата. Нижний захват имеет две стойки и перемычку с шестью дугообразными пальцами и кронштейнами для крепления штока гидроцилиндра привода. Верхний захват представляет собой прижимную ориентирующую раму из двух вертикальных стоек со сквозными регулировочными отверстиями и продольными и поперечными перемычками. Вертикальные стойки верхнего захвата закреплены на брусе посредством кронштейнов-направляющих с возможностью перемещения и фиксации в них посредством пальцев. Выполнение пальцев по дуге окружности с центром на оси вращения нижнего захвата сводит к минимуму повреждение прессованной массы и обвязочного материала. 3 ил.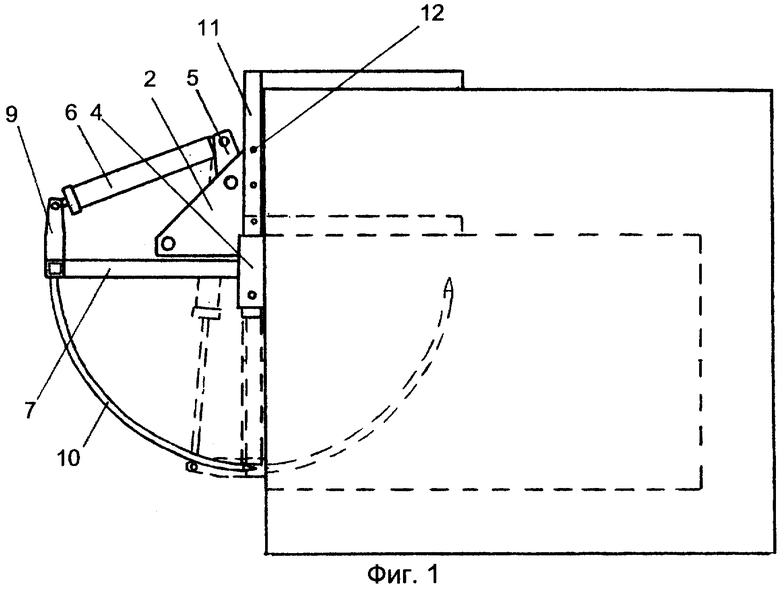
Грузозахватное устройство, содержащее навеску, брус, верхний захват и нижний захват, шарнирно закрепленный на брусе и имеющий гидроцилиндр и дугообразные пальцы, отличающееся тем, что верхний захват выполнен в виде прижимной ориентирующей рамы с перемычками и вертикальными стойками, имеющими сквозные регулировочные отверстия, при этом вертикальные стойки закреплены на брусе посредством кронштейнов-направляющих с возможностью перемещения и фиксации в них.
| Погрузчик для тюков из сеносоломистых материалов | 1985 |
|
SU1303073A1 |
| Погрузчик | 1977 |
|
SU640699A1 |
| СТОГОМЕТАТЕЛЬ-ПОГРУЗЧИК | 0 |
|
SU353677A1 |
| КОПНОВОЗ-ПОГРУЗЧИК | 0 |
|
SU246950A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1998 |
|
RU2137347C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2000 |
|
RU2173040C1 |
| US 4257725 А, 24.03.1981. | |||

