Изобретение относится к механизации сельского хозяйства, а именно к грузозахватным устройствам для погрузки и разгрузки тюков сена, соломы и сенажа, упакованных в полиэтиленовую пленку. Известно грузозахватное устройство для погрузки и разгрузки тюков и рулонов грубых кормов Weiss Master [US PATENT NO.5476356]. Устройство содержит раму, навеску, верхний и нижний захваты, сталкивающий механизм, гидроцилиндр привода, маслопровода с гидравлической арматурой. Нижний захват представляет собой неподвижный брус с девятью прямыми пальцами. Верхний захват шарнирно закреплен на раме и выполнен в виде захватной рамы с короткими пальцами.
Работа грузозахватного устройства заключается в следующем. Погрузчик подъезжает к боковой поверхности тюка, ориентирует грузозахватное устройство в горизонтальной и в вертикальной плоскостях и продолжает движение до полного вхождения пальцев нижнего захвата в прессованную массу. Затем посредством гидроцилиндра верхний захват опускается и его пальцы внедряются в верхнее основание тюка, предотвращая его сползание с пальцев нижнего захвата во время подъема и удержания. После погрузки с помощью гидроцилиндра отводится верхний захват и сталкивающий механизм сталкивает тюк с пальцев нижнего захвата.
Прототипом предлагаемого грузозахватного устройства является копновоз-погрузчик (а.с. №644417 А 01 D 87/12), состоящий из прижимной рамки, шарнирно соединенной с основанием для крепления грузозахватного органа, стоек для крепления шарнирных поперечных тяг, сталкивающего механизма, пальчатой платформы и привода, выполненного в виде гидроцилиндра.
Недостатком прототипа является невозможность погрузки тюков, упакованных в полиэтиленовую пленку, из-за наличия пальчатой платформы, которая может повредить упаковочный материал тюка во время погрузки.
Технической задачей предлагаемого изобретения является исключение повреждения упаковочного материала рабочими частями грузозахватного устройства.
Поставленная задача достигается в грузозахватном устройстве, содержащем прижимную раму, основание для его крепления к погрузчику и привод, выполненный в виде гидроцилиндров, где, согласно изобретению, прижимная рама имеет П-образную форму и выполнена телескопической и состоит из двух несущих частей, шарнирно закрепленных на основании, и подвижной части, свободно перемещающейся в несущих с помощью гидроцилиндров, корпуса которых закреплены на несущих частях посредством кронштейнов, а штоки гидроцилиндров сопряжены с подвижной частью рамы с возможностью регулировки ширины захвата, при этом прижимная рама для фиксации в исходном положении снабжена пружинами, соединенными посредством кронштейнов с основанием и несущими частями.
Оригинальность данного устройства выражается в том, что рама имеет П-образную форму, копирующую часть поверхности тюка, в исходном положении, позволяющую ориентировать устройство без дополнительных перемещений погрузчика. Рама выполнена телескопической и состоит из подвижной и несущих частей, причем несущие части выполнены полыми, а подвижная часть свободно перемещается в несущих под действием гидроцилиндров. Несущие части рамы шарнирно закреплены на основании, имеющем кронштейны для крепления грузозахватного устройства к стреле погрузчика. Пружины, одним своим концом закреплены на основании, а другим на несущих частях рамы, удерживают раму в исходном положении до начала цикла погрузки и возвращают ее в исходное положение по завершении цикла, и при отсутствии внедряемых в транспортируемый объект частей, такая конструкция позволяет перемещать тюки, упакованные в полиэтиленовую пленку.
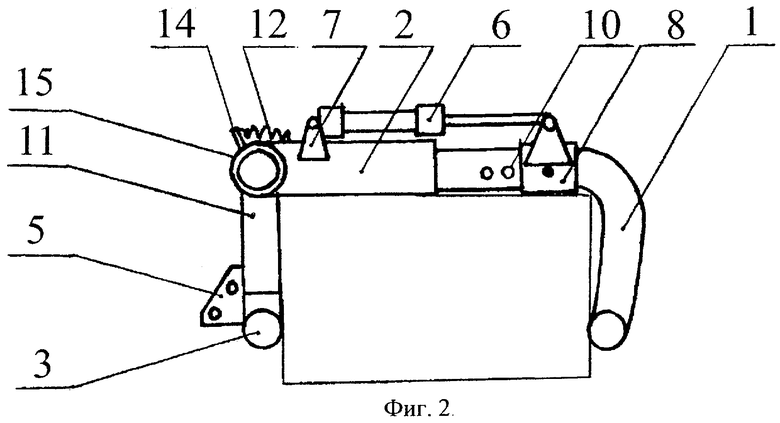
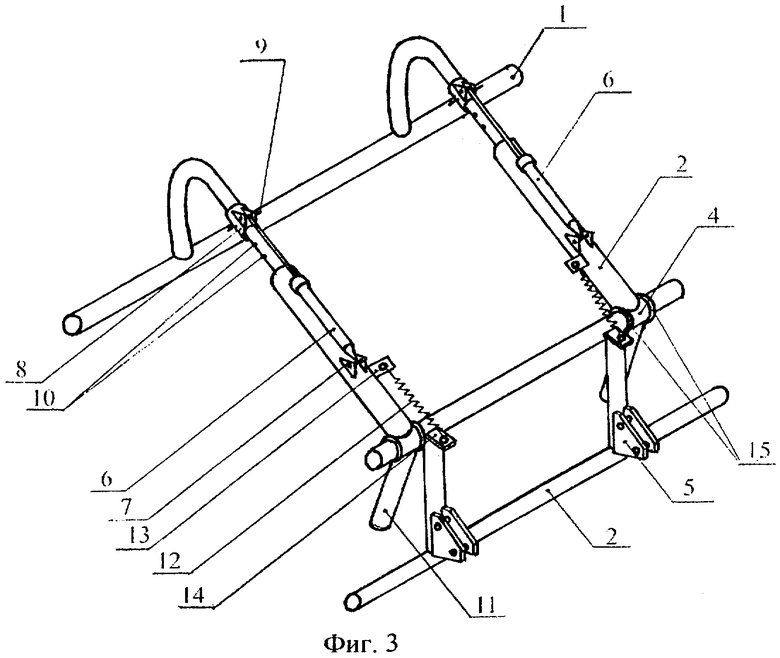
На фиг.1 изображена схема грузозахватного устройства - вид сбоку - исходное положение; на фиг.2 - схема грузозахватного устройства - вид сбоку после захвата тюка; на фиг.3 - схема грузозахватного устройства в аксонометрической проекции.
Грузозахватное устройство содержит П-образную прижимную раму, состоящую из подвижной части 1 (фиг.3) и несущих частей 2. Несущие части 2 закреплены на основании 3 с помощью шарниров 4. На основании 3 находятся кронштейны 5 (фиг.1) крепления грузозахватного устройства к стреле погрузчика. Привод грузозахватного устройства выполнен в виде двух гидроцилиндров 6, корпуса которых закреплены на несущих частях 2 прижимной рамы посредством кронштейнов 7, а штоки гидроцилиндров 6 закреплены на подвижной части 1 рамы с помощью регулировочных скоб 8, крепежных пальцев 9 (фиг.3) и отверстий 10 (фиг.2) в подвижной части 1 рамы. Такое крепление обеспечивает возможность регулировки грузозахватного устройства по ширине захвата. На шарнирах 4 (фиг.3) под углом 90° к несущим частям 2 жестко закреплены зубья 11, необходимые для обеспечения поворота прижимной рамы и захлопывания ее на тюке. Пружины 12, удерживающие прижимную раму в исходном положении, закреплены на кронштейнах 13 и 14, находящихся соответственно на несущих частях 2 рамы и основании устройства 3. Так же на основании устройства 3 находятся стопорные кольца 15 для исключения осевого перемещения прижимной рамы по основанию устройства 3.
Устройство работает следующим образом.
До начала работы осуществляется регулировка по ширине образуемого пресс-подборщиком тюка перестановкой крепежных пальцев 9 (фиг.3) в отверстиях 10 (фиг.2) на подвижной части рамы (фиг.3).
Погрузчик с грузозахватным устройством подъезжает к тюку с его длинной стороны, двигаясь поперек направлению движения пресс-подборщика.
При подъезде к тюку грузозахватное устройство удерживается в исходном положении пружинами 12, упирается в торцевую поверхность тюка зубьями 11, и при дальнейшем движении погрузчика П-образная прижимная рама начинает поворачиваться на шарнирах 4 относительно основания 3, захлопываясь на тюке и растягивая пружины 12. После касания тюка основанием 3 рабочая жидкость подается в надпоршневые полости гидроцилиндров 6 и посредством входа их штоков приводится в движение подвижная часть 1 рамы, которая прижимает тюк к основанию 3, что обеспечивает надежное удержание тюка при его перемещении и исключает повреждение упаковочного материала. После подъема тюк перемещается к месту погрузки (либо грузится в тележку, либо укладывается в штабель на краю поля). Далее подачей рабочей жидкости в подпоршневые полости гидроцилиндров тюк освобождается от захвата, и грузозахватное устройство приподнимается над тюком. Затем под действием пружин 12 прижимная рама возвращается в исходное положение, а тюк остается на месте без изменения.
По сравнению с существующими устройствами для захвата тюков предлагаемое устройство способно производить захват тюков, упакованных в полиэтиленовую пленку, без ее повреждения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2003 |
|
RU2259035C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2002 |
|
RU2217899C2 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2000 |
|
RU2173040C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1998 |
|
RU2137347C1 |
| Погрузчик тюков сена и соломы Бруславцева В.Е. | 2019 |
|
RU2726425C1 |
| РАЗРЕЗАЮЩЕЕ УСТРОЙСТВО ДЛЯ ПРЕССОВАННЫХ КОРМОВ | 2006 |
|
RU2318366C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2002 |
|
RU2225690C2 |
| ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ УПОРЯДОЧЕННОЙ УКЛАДКИ КРУПНОГАБАРИТНЫХ ПРЯМОУГОЛЬНЫХ ТЮКОВ РАСТИТЕЛЬНЫХ МАТЕРИАЛОВ | 2007 |
|
RU2354103C1 |
| РАЗРЕЗАЮЩЕЕ УСТРОЙСТВО ДЛЯ КРУПНОГАБАРИТНЫХ РУЛОНОВ | 2013 |
|
RU2552071C2 |
| Погрузчик для плодов | 1981 |
|
SU1024416A2 |
Изобретение относится к сельскохозяйственному машиностроению и может быть использовано в устройствах для погрузки и разгрузки упакованных в полиэтиленовую пленку тюков сена и другой сельскохозяйственной продукции. Грузозахватное устройство закрепляется к основанию для его крепления к погрузчику и содержит прижимную П-образную телескопическую раму и привод. Прижимная рама состоит из подвижной части и двух несущих частей. На основании расположены кронштейны крепления грузозахватного устройства к стреле погрузчика. Привод устройства выполнен в виде двух гидроцилиндров. Корпуса гидроцилиндров закреплены на несущих частях прижимной рамы посредством кронштейнов. Штоки гидроцилиндров прижимной рамы закреплены на подвижной части прижимной рамы с помощью регулировочных скоб и отверстий с крепежными пальцами. Несущие части прижимной рамы шарнирно закреплены к основанию устройства. На несущих частях рамы и на основании устройства расположены кронштейны для закрепления пружин. Погрузчик подъезжает к тюку и после касания его основанием подвижная часть рамы под действием гидроцилиндров прижимает тюк к основанию. Тюк перемещается к месту погрузки и освобождается от захвата. Грузозахватное устройство исключает повреждение упаковочного материала тюка при осуществлении погрузочно-разгрузочных работ. 3 ил.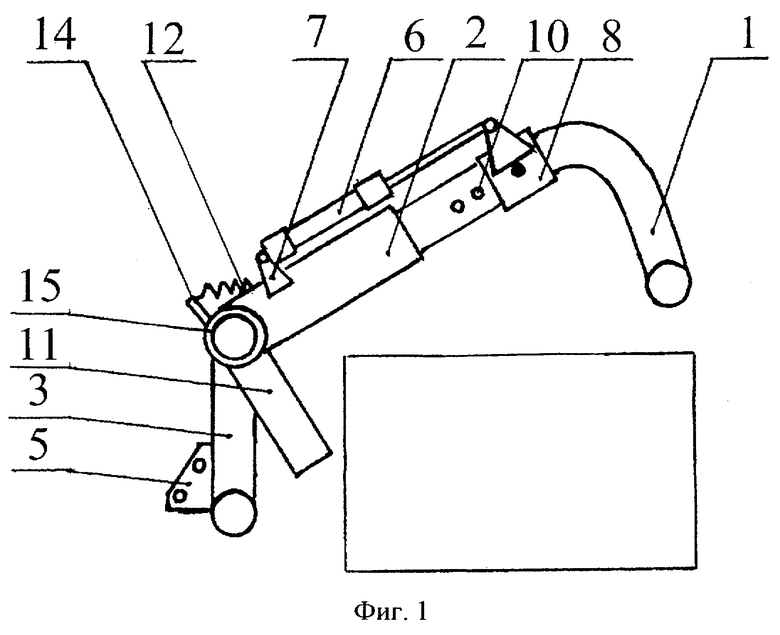
Грузозахватное устройство, содержащее прижимную раму, основание для его крепления к погрузчику и привод, выполненный в виде гидроцилиндров, отличающееся тем, что прижимная рама имеет П-образную форму, выполнена телескопической и состоит из двух несущих частей, шарнирно закрепленных на основании, и подвижной части, свободно перемещающейся в несущих с помощью гидроцилиндров, корпуса которых закреплены на несущих частях посредством кронштейнов, а штоки гидроцилиндров сопряжены с подвижной частью рамы с возможностью регулировки ширины захвата, при этом прижимная рама для фиксации в исходном положении снабжена пружинами, соединенными посредством кронштейнов с основанием и несущими частями рамы.
| Копновоз-погрузчик | 1976 |
|
SU644417A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2002 |
|
RU2217899C2 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1998 |
|
RU2137347C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2000 |
|
RU2173040C1 |
| Подборщик тюков | 1987 |
|
SU1537177A1 |
| Погрузчик для тюков из сеносоломистых материалов | 1985 |
|
SU1303073A1 |
| US 4722651 А, 02.02.1988. | |||

