Изобретение относится к микроробототехнике и микросистемной технике и может быть использовано при создании манипуляторов микророботов или других микромеханизмов.
Известен привод микроманипулятора, содержащий основание, входное звено, соединенное с вибратором и выполненное в виде цилиндра с зубчатым венцом на его боковой поверхности, выходное звено, связанное со столом, снабженным направляющими, и электромагниты [авторское свидетельство СССР №1366386, кл. B 25 J 7/00, 1988].
Недостатком данного устройства является нелинейность и инерционность характеристик при определенных режимах работы. Кроме того, устройство имеет относительно большие габаритные и массовые характеристики, может вызывать электромагнитные наводки на объекты микросреды.
Известен также привод микроманипулятора, выполненный в виде пьезонасоса, состоящего из деформируемого и подвижного пьезоэлемента, регулируемого с помощью винта, и первого и второго деформируемых элементов конструкции, при этом в первом и втором каналах пьезонасоса расположены первый и второй клапаны, которые представляют собой первый и второй пьезокристаллы, установленные каждый, соответственно, в первом и во втором стаканах, и рабочей жидкостью, причем первый и второй каналы соединены с полостью цилиндра, к поршню которого прикреплен схват [патент РФ №2175601, кл. В 25 J 7/00, 2001].
Недостатками данного устройства являются низкое быстродействие и сложность регулирования усилий, создаваемых приводом. Кроме того, следует отметить определенную конструктивную сложность данного устройства.
Наиболее близким по технической сущности и достигаемому результату к заявленному является привод микроманипулятора, содержащий установленный в корпусе пьезопреобразователь, включающий, по крайней мере, две прямоугольные призмы, выполненные из пьезоматериала и расположенные вдоль штока с закрепленной на нем зубчатой рейкой. Шток установлен в корпусе на шариковых направляющих. Призмы соединены обращенными друг к другу основаниями с корпусом, а на одной из граней каждой из призм, обращенной к зубчатой рейке штока, установлена накладка с выступом по форме впадины между зубьями рейки. На каждой из двух других, расположенных противоположно гранях закреплены параллельно ребрам призмы два электрода, при этом призмы подпружинены к корпусу пружинами в направлении к штоку [авторское свидетельство СССР №1271738, кл. В 25 J 7/00, 1986].
Недостатками прототипа являются низкая нагрузочная способность, сложность регулирования усилий, создаваемых приводом, и ограниченные функциональные возможности.
Задачей, на решение которой направлено заявляемое изобретение, является улучшение эксплуатационных характеристик, связанное с повышением нагрузочной способности, линеаризацией выходных характеристик, снижением инерционности привода и обеспечением двухстороннего движения.
Решение поставленной задачи достигается тем, что в двухстороннем пьезоэлектромеханическом микроприводе, содержащем корпус с установленными в нем идентичными пьезоэлектрическими преобразователями и штоком с закрепленной на нем зубчатой рейкой прямого хода, в отличие от прототипа, дополнительно содержится второй шток с зубчатой рейкой обратного хода, причем пьезоэлектрические преобразователи образуют первую, вторую, третью и четвертую группы, при этом зубчатые рейки с внутренней поверхности кинематически связаны между собой зубчатым колесом, а с внешней зубчатая рейка прямого хода находится в зацеплении с первой и второй группами пьезоэлектрических преобразователей, а зубчатая рейка обратного хода - с третьей и четвертой группами, один конец каждого пьезоэлектрического преобразователя закреплен к корпусу с возможностью отклонения другого конца, покрытого износостойким материалом, перпендикулярно оси штока, причем зубчатые рейки установлены на фиксирующих ограничителях и направляющих, выполненных в корпусе, а внешняя поверхность зубчатых реек продольно по центру покрыта прямоугольными зубьями, профили которых в сечении, параллельном этой поверхности, представляют собой прямоугольные треугольники, разделенные пазами, причем углы наклона зубьев зубчатой рейки прямого и обратного хода имеют противоположенные направления, а высота зубьев равна величине отклонений концов идентичных пьезоэлектрических преобразователей.
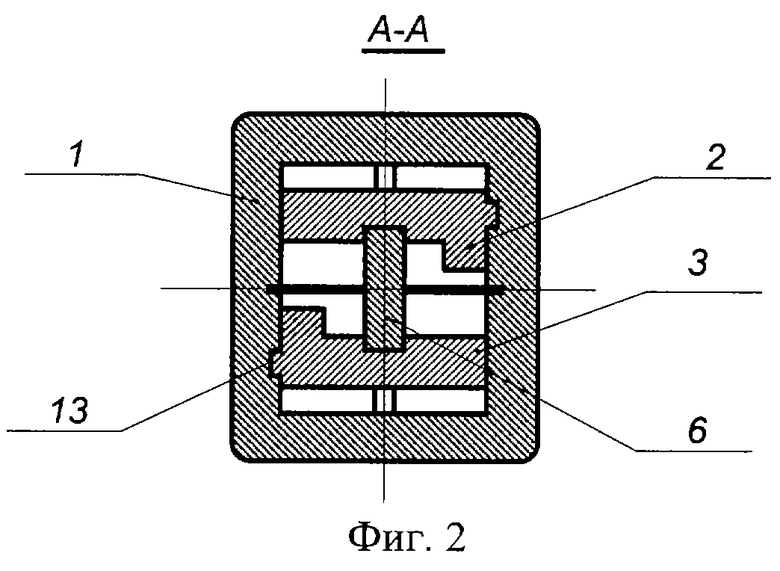
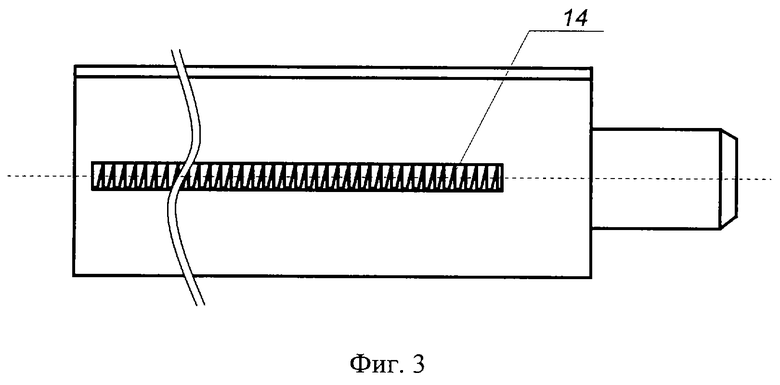
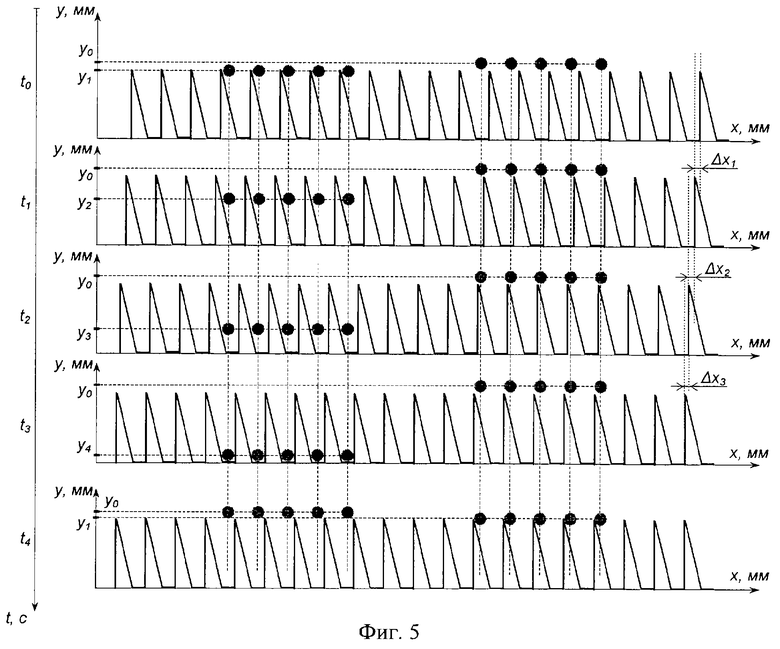
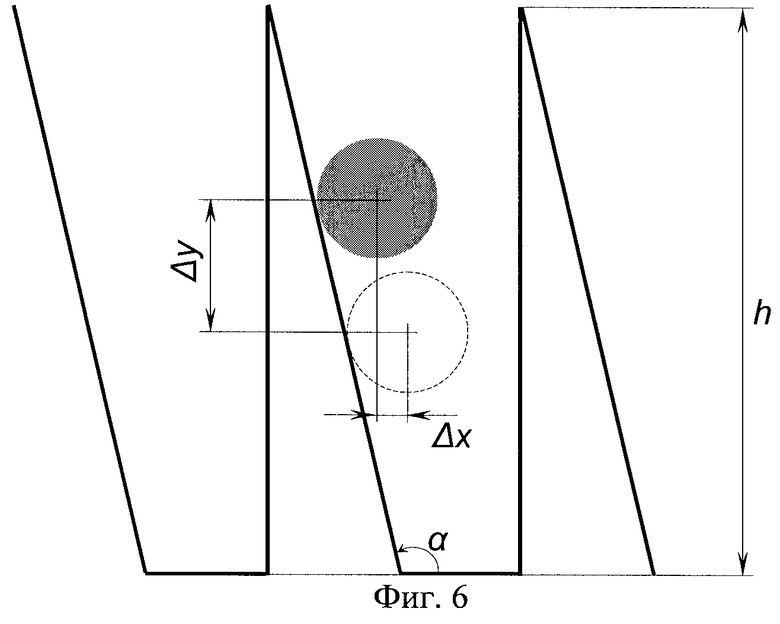
На фиг.1 представлена конструкция двухстороннего пьезоэлектромеханического микропривода; на фиг.2 - то же, поперечный разрез; на фиг.3 - зубчатая рейка прямого хода (вид сверху); на фиг.4 - временные диаграммы управляющих напряжений для пьезоэлектрических преобразователей; на фиг.5 - временные диаграммы скольжения концов пьезоэлектрических преобразователей по направляющим скосам прямоугольных зубьев зубчатых реек; на фиг.6 - профили зубьев зубчатых реек в поверхностном сечении.
Двухсторонний пьезоэлектромеханический микропривод (фиг.1) содержит корпус 1, в котором установлены зубчатые рейки прямого 2 и обратного 3 хода, соединенные соответственно со штоками 4 и 5. Зубчатые рейки с внутренней поверхности кинематически связаны между собой зубчатым колесом 6, а с внешней зубчатая рейка прямого хода 2 находится в зацеплении с первой 7 и второй 8 группами идентичных пьезоэлектрических преобразователей, а зубчатая рейка обратного 3 хода - с третьей 9 и четвертой 10 группами. Один конец каждого пьезоэлектрического преобразователя 11 закреплен к корпусу 1, а другой покрыт износостойким материалом и способен отклоняться перпендикулярно оси штока. Зубчатые рейки установлены на фиксирующих ограничителях 12 и направляющих 13 (фиг.2), выполненных в корпусе 1. Внешняя поверхность зубчатых реек продольно по центру покрыта прямоугольными зубьями 14 (фиг.3), профили которых в сечении, параллельном этой поверхности, представляют собой прямоугольные треугольники, разделенные пазами, причем углы наклона зубьев зубчатой рейки прямого 2 и обратного 3 хода имеют противоположенные направления, а высота зубьев равна величине отклонений концов идентичных пьезоэлектрических преобразователей 11.
Двухсторонний пьезоэлектромеханический микропривод работает следующим образом.
Основой реализации движений микропривода являются пьезоэлектрические преобразователи 11, которые под действием управляющих напряжений деформируются - изгибаются в двух направлениях, и входят в зацепление с расположенными на внешней поверхности зубчатых реек прямоугольными зубьями, тем самым реализуя прямой (выдвижение штоков) и обратный ход (втягивание штоков) микропривода.
Далее рассмотрим подробнее прямой ход микропривода (выдвижение штоков).
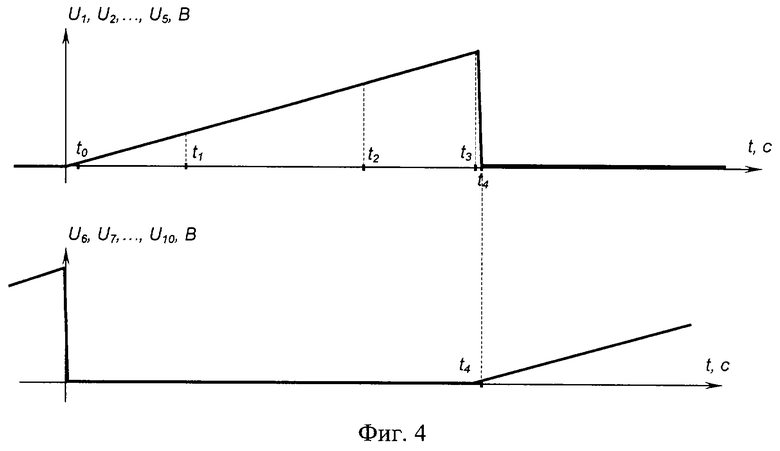
На фиг.4 представлены управляющие напряжения, подаваемые на первую 7 (U1, U2,...U5) и вторую 8 группы (U6, U7,...U10) идентичных пьезоэлектрических преобразователей. При отсутствии сигналов управления (Ui=0 В) пьезоэлектрические преобразователи 11 распрямлены, при подаче сигналов - деформируются, сгибаясь одновременно в одном направлении, на величину, пропорциональную приложенным напряжениям.
Для прямого хода микропривода на первую 7 группу идентичных пьезоэлектрических преобразователей подаются напряжения U1=U2=...=U5 (фиг.4), нарастающие по треугольной форме и вызывающие деформацию преобразователей. В момент времени t0 концы идентичных пьезоэлектрических преобразователей первой 7 группы перемещаются на величину (y0-y1) (фиг.5) и входят в зацепление с прямоугольными зубьями 14 зубчатой рейки прямого 2 хода. К моменту времени t1 концы идентичных преобразователей первой 7 группы перемещаются еще на величину Δy1=(y1-y2) и, скользя по направляющим скосам прямоугольных зубьев 14, перемещают зубчатую рейку прямого 2 хода на величину Δx1=Δy1·cos(α) sin(α), где α - угол наклона прямоугольных зубьев 14 (фиг.6), зубчатая рейка прямого 2 хода, в свою очередь, обеспечивает перемещение в том же направлении штоку 5, а посредством зубчатого колеса 6 - перемещение в противоположенном направлении также на величину Δx1 зубчатой рейке обратного 3 хода, которая обладает возможностью свободного перемещения по направляющим 13 до фиксирующих ограничителей 12, т.к. на третьей 9 и четвертой 10 группах идентичных пьезоэлектрических преобразователей управляющие напряжения отсутствуют. Кроме того, зубчатая рейка обратного 3 хода обеспечивает перемещение штоку 4. Причем, если угол наклона α прямоугольных зубьев удовлетворяет условию 0°<α<90° - штоки 4 и 5 выдвигаются, а если выполняется условие 90°<α<180° - штоки 4 и 5 втягиваются. К моменту времени t1 треугольные напряжения U1,U2,...U5 продолжают нарастать, тем самым еще больше сгибая идентичные пьезоэлектрические преобразователи первой 7 группы и перемещая их концы дополнительно на величину Δy2=(y2-y3), а зубчатые рейки на Δx2=Δy2·cos(α)sin(α), что, в свою очередь, приводит к выдвижению штоков 4, 5, т.к. угол наклона прямоугольных зубьев зубчатой рейки прямого 2 хода удовлетворяет условию 0°<α<90° (фиг.3). К моменту времени t3 напряжения U1,U2,...U5 достигают максимальных значений, результирующее отклонение концов идентичных пьезоэлектрических преобразователей первой 7 группы составляет величину h, где h - высота прямоугольных зубьев (фиг.6), т.е. их высота равна величине максимальных отклонений концов пьезоэлектрических преобразователей 11, результирующее выдвижение каждого из штоков 4 и 5 составляет h·cos(α)sin(α). В момент времени t3 прикладываемые напряжения U1,U2,...U5 скачкообразно падают, и одновременно с этим подаются напряжения U6,=U7=,...=U10, нарастающие по треугольной форме. К моменту времени t4 идентичные пьезоэлектрические преобразователи первой 7 группы распрямляются, а преобразователи второй 8 группы входят в зацепление с прямоугольными зубьями 14 зубчатой рейки прямого 2 хода, этим достигается фиксация штоков 4 и 5 в статическом положении. Таким образом, с момента времени t4 зубчатая рейка прямого 2 хода входит в очередное зацепление уже со второй 8 группой идентичных пьезоэлектрических преобразователей, и аналогично зацеплению с первой 7 группой штоки 4 и 5 выдвигаются еще на h·cos(α)sin(α). При результирующем выдвижении штоков 4 и 5 на величину 2·h·cos(α)sin(α) первый цикл прямого хода микропривода завершается. Подобным образом реализуются второй, третий, четвертый и т.д. циклы прямого хода микропривода.
Обратный ход микропривода (втягивание штоков) осуществляется так же, как прямой ход, за исключением того, что в поочередное зацепление входит зубчатая рейка обратного 3 хода с третьей 9 и четвертой 10 группой идентичных пьезоэлектрических преобразователей. Причем углы наклона зубьев зубчатой рейки прямого 2 и обратного 3 хода имеют противоположенные направления, т.е. угол наклона α зубьев зубчатой рейки обратного 3 хода удовлетворяет условию 90°<α<180°, что приводит не к выдвижению, а к втягиванию штоков 4 и 5 при скольжении концов пьезоэлектрических преобразователей 11 по направляющим скосам прямоугольных зубьев 14 зубчатой рейки обратного 3 хода.
Увеличивая или уменьшая число управляемых пьезоэлектрических преобразователей 11 в первой, второй, третьей и четвертой группах, можно легко регулировать величину усилия, создаваемого микроприводом, и существенно повысить нагрузочную способность. Кроме того, треугольная форма управляющих напряжений позволяет получить линейные выходные характеристики, а низкая инерционность обеспечивается использованием быстродействующих пьезоэлектрических преобразователей с низким временем отклика.
Итак, заявляемое изобретение позволяет провести улучшение эксплуатационных характеристик, связанное с повышением нагрузочной способности, линеаризацией выходных характеристик, снижением инерционности привода и обеспечением двухстороннего движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ДВИЖЕНИЯ АЛИЕВЫХ | 2007 |
|
RU2349814C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2266808C1 |
| ПРЕОБРАЗОВАТЕЛЬ ДВИЖЕНИЯ | 2005 |
|
RU2308603C2 |
| Гидродвигатель вращательного действия | 1977 |
|
SU735821A1 |
| ПЛАВУЧАЯ ПРИБРЕЖНАЯ ГИДРОВОЛНОВАЯ ЭЛЕКТРОСТАНЦИЯ (ВАРИАНТЫ) | 2012 |
|
RU2702828C2 |
| ТЕРМОКАПИЛЛЯРНЫЙ ПОРШНЕВОЙ МИКРОПРИВОД | 2004 |
|
RU2266809C1 |
| АВТОМАТИЧЕСКИЙ МЕХАНИЧЕСКИЙ ФИКСАТОР ШТОКА ТОРМОЗНОГО ЦИЛИНДРА ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА РЕЕЧНОГО ТИПА С КЛИНОВЫМ ЗАЖИМОМ | 2005 |
|
RU2286896C1 |
| Устройство для преобразования возвратно-поступательного движения в прерывистое вращательное | 1985 |
|
SU1303774A1 |
| ШИБЕРНЫЙ МЕХАНИЗМ РАЗГРУЗКИ ВАГОНА-ХОППЕРА | 2015 |
|
RU2600179C1 |
| Реечный механизм | 1989 |
|
SU1739144A1 |
Изобретение относится к микроробототехнике и микросистемной технике. Микропривод содержит корпус с установленными в нем идентичными пьезоэлектрическими преобразователями и штоки с закрепленными на них зубчатыми рейками прямого и обратного хода. Зубчатые рейки с внутренней поверхности кинематически связаны между собой зубчатым колесом, а с внешней зубчатая рейка прямого хода находится в зацеплении с первой и второй группами пьезоэлектрических преобразователей, а зубчатая рейка обратного хода - с третьей и четвертой группами. Один конец каждого пьезоэлектрического преобразователя закреплен к корпусу с возможностью отклонения другого конца, покрытого износостойким материалом, перпендикулярно оси штока. Зубчатые рейки установлены на фиксирующих ограничителях и направляющих, выполненных в корпусе. Внешняя поверхность зубчатых реек продольно по центру покрыта прямоугольными зубьями, профили которых в сечении, параллельном этой поверхности, представляют собой прямоугольные треугольники, разделенные пазами. Углы наклона зубьев зубчатой рейки прямого и обратного хода имеют противоположные направления, а высота зубьев равна величине отклонений концов идентичных пьезоэлектрических преобразователей. Изобретение позволит повысить нагрузочную способность, снизить инерционность привода. 6 ил.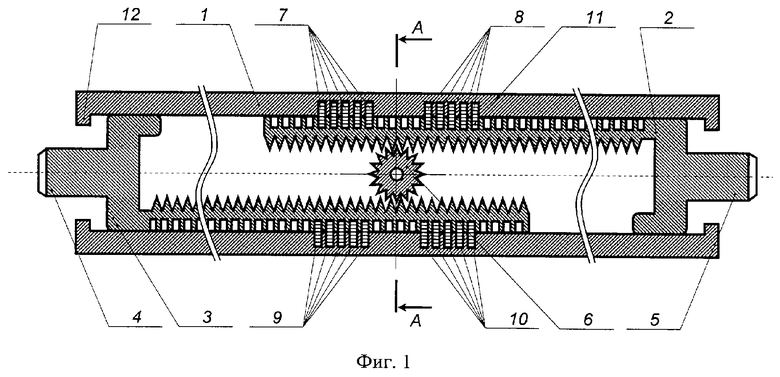
Двухсторонний пьезоэлектромеханический микропривод, содержащий корпус с установленными в нем идентичными пьезоэлектрическими преобразователями и шток с закрепленной на нем зубчатой рейкой прямого хода, отличающийся тем, что дополнительно содержит второй шток с зубчатой рейкой обратного хода, причем пьезоэлектрические преобразователи образуют первую, вторую, третью и четвертую группы, при этом зубчатые рейки с внутренней поверхности кинематически связаны между собой зубчатым колесом, а с внешней зубчатая рейка прямого хода находится в зацеплении с первой и второй группами пьезоэлектрических преобразователей, а зубчатая рейка обратного хода - с третьей и четвертой группами, один конец каждого пьезоэлектрического преобразователя закреплен к корпусу с возможностью отклонения другого конца, покрытого износостойким материалом, перпендикулярно оси штока, причем зубчатые рейки установлены на фиксирующих ограничителях и направляющих, выполненных в корпусе, а внешняя поверхность зубчатых реек продольно по центру покрыта прямоугольными зубьями, профили которых в сечении, параллельном этой поверхности, представляют собой прямоугольные треугольники, разделенные пазами, причем углы наклона зубьев зубчатой рейки прямого и обратного хода имеют противоположные направления, а высота зубьев равна величине отклонений концов идентичных пьезоэлектрических преобразователей.
| Привод микроманипулятора | 1985 |
|
SU1271738A1 |
| ПРИВОД МИКРОМАНИПУЛЯТОРА | 2000 |
|
RU2175601C2 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |

