Изобретение относится к машиностроению, а именно к механизмам для преобразования возвратно-поступательного движения во вращательное и наоборот, и может быть использовано в двигателях внутреннего сгорания, а также в насосах и компрессорах объемного типа.
Известен механизм для преобразования возвратно-поступательного движения во вращательное и наоборот [1].
Данный механизм содержит корпус с направляющей, установленный в ней с возможностью осевого перемещения шток, два кривошипа и механизм синхронизации их вращения в противоположных направлениях с равными угловыми скоростями, снабженный закрепленной на штоке кулисой с двумя пазами, при пересечении продольной оси которой с осями вращения кривошипов шипы последних расположены на противоположных концах кулисы и установлены в соответствующих ее пазах с возможностью осевого перемещения, а плоскости вращения кривошипов взаимно параллельны.
Недостатком данного механизма является несовершенная кинематическая схема, т.к. при преобразовании вращательного движения в возвратно-поступательное и наоборот в механизмах с кривошипом, который совершает оборот на 360°, происходит недостаточно полный отбор мощности, т.е. меньший КПД.
Цель изобретения - повышение КПД.
Известен также «Преобразователь вращательного движения в возвратно-поступательное и наоборот» [2], который взят в качестве прототипа. Прототип содержит корпус 1 с зубчатыми колесами 2 и 3, выполняющими функцию механизма синхронизации вращения в противоположных направлениях с равными угловыми скоростями, посаженными на валах 4 заодно с колесами 5, на которых на выступах смонтированы рычаги с пружинами 6 и буферами 7. Валы 4 с колесами 5 упираются в двухрядный упорный подшипник 8 и радиально-упорные подшипники 9, которые смонтированы в муфте 10 с кольцевыми проточками, в которые вставлены рычаги-кривошипы 11, шарнирно связанные со штоками 12 и поршнями 13, движущимися в цилиндре 14, закрепленном на корпусе и преобразующем вращательное движение муфты 15 в возвратно-поступательное движение поршня 13 или наоборот за счет направляющей 16, прикрепленной к корпусу 1 и выполненной с пазами, изогнутыми в разные стороны.
При преобразовании вращательного движения в возвратно-поступательное крутящий момент от электродвигателя через муфту 15 передается на зубчатое колесо 2, которое вращает зубчатые колеса 3 в противоположных направлениях с равными угловыми скоростями. Колеса 3 вращаются вместе с колесами 5 и пружинами 6 с буферами 7, ударяющими по кривошипам 11, движущими возвратно-поступательно поршни и в тоже время движущимися по направляющим пазам в бронзовой направляющей 16. За один такт кривошип 11 проходит определенный угол (фиг.3) и отклоняется в сторону, где его двигает такой же рычаг в другую сторону, совершая следующий такт.
Недостатком прототипа является сложность конструкции и низкий КПД, связанный с изменением длины рычага в кривошипно-шатунном механизме.
Технической задачей данного изобретения является упрощение конструкции и повышения КПД преобразователя возвратно-поступательного движения во вращательное и наоборот.
Данная техническая задача решается следующим образом.
Преобразователь движения содержит четыре цилиндра, расположенные попарно, поршни взаимно противоположных цилиндров которых связаны друг с другом неподвижно, через первую и вторую пару неподвижно связанные параллельные зубчатые рейки. Данные рейки находятся в сцеплении с соответствующими сегментными зубчатыми колесами. Колеса при этом установлены неподвижно на одном выходном валу. На каждом зубчатом колесе зубья занимают менее половины его делительной окружности. Кроме того, процессы взаимодействия зубчатых реек с соответствующими сегментными звездами сдвинуты во времени по фазе, преимущественно на 90°.
Вал во втором варианте является ведущим, а первое и второе сегментные колеса, кинематически связанные с соответствующими парами зубчатых реек, установлены с возможностью относительного смещения по углу в пределах от 0 до ±180°, а возвратно-поступательное движение является выходным движением.
Данный преобразователь имеет упрощенную конструкцию, низкую себестоимость, а также увеличивается срок эксплуатации. КПД повышается вследствие того, что рычаг не меняется и равен радиусу сегментного колеса. Переключение моментов взаимодействия зубчатых реек 11-14 с соответствующими сегментными зубчатыми колесами 16, 19 происходит в момент, когда поршни 5-8 находятся в мертвых точках. КПД преобразователя повысится на 43%. При косинусоидальном изменении размера рычага в кривошипно-шатунном преобразователе среднее его значение равно 0,57 Lmax. Пропорционально длине рычага будет меняться мощность на валу преобразователя.
Известен также двигатель внутреннего сгорания (ДВС) [3], который содержит цилиндр двухстороннего действия и имеет объединенные рабочие полости, а поршни смежных цилиндров совершают движение в противоположном направлении.
В этом случае два цилиндра 1, 3 устанавливаются только с одной стороны от вала параллельно друг другу в одной полости (см. фиг.3). При этом отпадает необходимость в двух противоположно установленных цилиндрах 2, 4 и связанных с ними штоках 9, 10. Зубчатые пары реек 9, 10 и 11, 12 могут совершить возвратно-поступательное движение в специальных направляющих пазах в корпусе двигателя.
Применение ДВС совместно с предложенным преобразователем позволит создать компактный двигатель с высоким КПД и низкой себестоимостью.
На фиг.1 представлена конструкция преобразователя движения, где:
1, 2, 3, 4 - первый, второй, третий и четвертый цилиндры двигателя внутреннего сгорания (ДВС);
5, 6, 7, 8 - первый, второй, третий и четвертый поршни ДВС;
9, 10 - первая и вторая штанги;
11, 12 - первая пара зубчатых реек;
13, 14 - вторая пара зубчатых реек;
15 - планки;
16 - первая сегментная шестерня;
17 - уплотнительные кольца (не показаны);
18 - выходной вал.
На фиг.2 представлен вид Е по фиг.1, где элементы 4-18 те же, что на фиг.1;
19 - вторая сегментная шестерня.
20 - фиксирующий болт (не показан).
На фиг.3 представлен вид сверху на преобразователь при параллельной установке штанг, где:
21, 22 - первая и вторая обгонные муфты;
23 - маховик;
24 - ведущая шестерня;
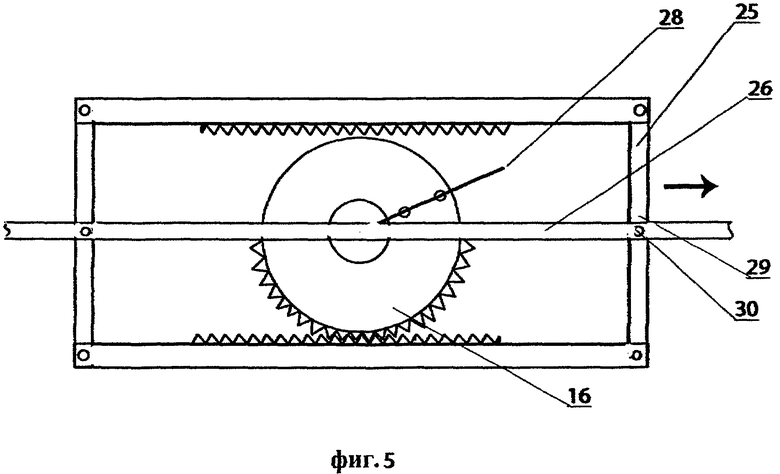
25 - поперечные планки;
26, 27 - первая и вторая штанги.
На фиг.4 представлен вид А по фиг.3, где:
28 - пружина;
29 - шарнирные соединения (не показаны).
На фиг.5 представлен вид В по фиг.3, где все позиции те же, что на фиг.3.
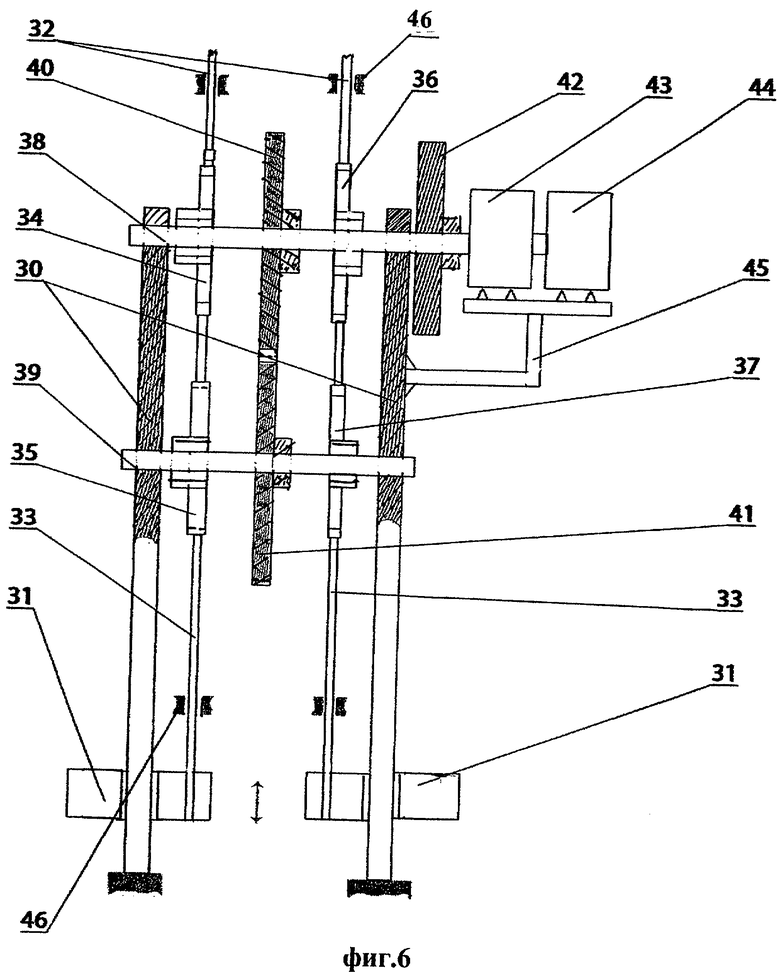
На фиг.6 представлен второй вариант преобразователя возвратно-поступательного движения во вращательное, где:
30 - стойки;
31 - понтоны;
32 - толкатели;
33 - цепи;
34, 35, 36, 37 - первая, вторая, третья и четвертая звезды, установленные на обгонных муфтах;
38, 39 - первый и второй валы;
40, 41 - первая и вторая шестерни;
42 - маховик;
43 - мультипликатор;
44 - генератор;
45 - подставка;
46 - направляющие для толкателей.
Принцип работы преобразователя движения, кинематическая схема которого представлена на фиг.1, заключается в следующем.
В первом варианте преобразователя движения четыре цилиндра четырехтактного двигателя внутреннего сгорания 1-4 устанавливаются крестообразно (см. фиг.1).
Штоки 9 двух поршней 5 и 6 (7 и 8) соединены с помощью двух параллельных планок 15 с соответствующими двумя параллельными зубчатыми рейками 11 и 12 (13 и 14).
Первая пара зубчатых реек 11 и 12 входит в сцепление с зубьями первой сегментной шестерни 16. Зубьями охвачена только одна половина сегментной шестерни. При вхождении одной из зубчатых реек 11 или 12 в сцепление с зубьями сегментной шестерни 16, другая рейка находится в нейтральном положении - вне зацепления.
Аналогичным образом вторая пара зубчатых реек 13 и 14, жестко связанная со второй парой поршней 7 и 8, совершающих возвратно-поступательное движение, по очереди входят в сцепление с зубьями второй сегментной шестерни 19.
Так как зубья на сегментных шестернях расположены менее чем на половине делительной окружности, то поочередное сцепление с шестерней зубьев двух параллельных зубчатых реек приводит к вращению сегментной шестерни в одном направлении. На фиг.1 такое взаимодействие реек с шестерней 16 приводит к его вращению и связанного с ним вала 18 против часовой стрелки.
На участках сегментных шестерен 16 и 19, где нет зубьев, их срезают на уровне ниже уровня впадин между зубьями. Рейка на этом участке не касается шестерни.
Для исключения «мертвой» точки, когда первая сегментная шестерня 16 находится в нейтральном положении, т.е. вне сцепления с обоими зубчатыми рейками первой пары, одна из реек 13 или 14 второй пары обязательно должна находиться в сцеплении со второй сегментной шестерней 19.
Так как первая 16 и вторая 19 сегментные шестерни на выходном валу 18 установлены неподвижно, то процесс вращения вала непрерывный.
Зубья на первой и второй сегментных шестернях сдвинуты на 180°, т.е. взаимно дополняют до полного круга. В этом случае рейки входят в сцепление с шестернями со сдвигом по фазе на 90°. Это соответствует тому, что когда середина первой вертикальной (левой) рейки 11 находится в сцеплении со средними зубьями первой сегментной шестерни 16, начало четвертой (верхней) рейки вступает в сцепление с началом зубчатой половины второй сегментной шестерни 19.
На фиг.2 приведен вид Е по фиг.1.
На общем валу 18 установлены неподвижно первая 16 и вторая 19 сегментные шестерни. Так как четыре цилиндра четырехтактного двигателя установлены крестообразно, со сдвигом 90° относительно друг друга, наиболее оптимален сдвиг по фазе 90° между процессами взаимодействия зубчатых реек 11 и 12 (13 и 14) с зубчатыми шестернями 16 (19).
Сегментные зубчатые шестерни установлены на обоймах обгонных муфт 21, 22, ступицы которых закреплены на выходном валу преобразователя 18. При необходимости может быть установлено храповое колесо с собачкой, исключающее поворот вала 18 в обратном направлении. Для достижения равномерного вращения электрогенератора на валу может быть установлен массивный маховик 23. Такой преобразователь движения может быть установлен для преобразования энергии волн в электрическую. На выходном валу преобразователя неподвижно установлена ведущая шестерня 24, вращение от которой передается через мультипликатор на электрогенератор.
Возможен любой другой сдвиг по фазе между указанными процессами и расположением цилиндров. Угол между осями цилиндров и возвратно-поступательными направлениями движения зубчатых реек может меняться в пределах от 0 до 360° дискретно с шагом  где m - модуль зубца сегментного колеса 16 (19), a R - радиус делительной окружности сегментного колеса. Наиболее оптимальным является сдвиг по фазе 90°.
где m - модуль зубца сегментного колеса 16 (19), a R - радиус делительной окружности сегментного колеса. Наиболее оптимальным является сдвиг по фазе 90°.
Преобразователь движения, конструкция которого представлена на фиг.3-фиг.5, отличается тем, что все четыре цилиндра 1-4 установлены в одной плоскости, и штоки 9 и 10, соединяющие противоположные пары поршней 5-6 и 7-8, параллельны друг другу и находятся в плоскости, проходившей через ось выходного вала 18.
В таблице №1 приведена последовательность смены тактов для четырехтактного ДВС при работе четырех цилиндров I-IV, где Т/4, Т/2, 3/4 Т и Т - последовательность четвертьпериодов работы цилиндров. В каждый момент времени один из цилиндров находится в рабочей фазе, что обеспечивает равномерность вращения выходного вала преобразователя движения.
В фронтальной плоскости угол ϑ между штоками 9 и 10 может меняться от 0 до 180°. На фиг.1 ϑ=0°, а на фиг.3 ϑ=+90°. Сдвиг фазы между моментами взаимодействия зубчатых реечных пар 11-14 с соответствующими зубчатыми сегментными шестернями 16 и 19 равен 90° независимо от величины и знака угла ϑ (см. фиг.1 и фиг.3).
При применении предложенного механизма для преобразования вращательного движения в возвратно-поступательное в случае необходимости угол ϑ может меняться дискретно от 0 до 360°. Минимальный угол равен 
Для этого необходимо менять угловое положение одного из сегментных колес относительно другого, например второго колеса 19, открутив фиксирующий болт 20 (см. фиг.2).
В момент изменения углового положения шестерня 19 должна находиться в сцеплении с одной из зубчатых реек 13 или 14. Вместе с шестерней 19 должны быть повернуты одновременно все кинематически связанные с ним элементы - зубчатые рейки 13, 14; штоки 10, поршни 7, 8 и цилиндры 3, 4. Для этого все эти элементы должны быть установлены на специальной поворотной платформе с фиксатором его углового положения относительно корпуса. После поворота платформы угловое положение сегментной шестерни 19 снова фиксируется болтом 20.
Преобразователь движения, представленный на фиг.1-фиг.3, может быть использован и для выполнения обратной операции - для преобразования вращательного движения вала во возвратно-поступательное движение зубчатых реек. Необходимость в таком преобразователе возникает, например, для создания строгальных, шлифовальных, пилорамочных станков и т.д.
При вращении вала 18 и неподвижно связанных с ним сегментных шестерен 16 и 19 зубчатые пары реек 11-12 и 13-14 и связанные с ними штоки 9 и 10 совершают возвратно-поступательное движение.
Принцип работы второго варианта преобразователя движения, представленного на фиг.6, заключается в следующем.
В море устанавливаются неподвижно две вертикальные стойки 30. С двух сторон каждой стойки устанавливаются понтоны обтекаемой формы. В качестве понтонов могут быть использованы катамараны - водные велосипеды. Вес понтона должен быть таким, чтоб он был равен весу вытесненной катамараном воды при его полном погружении. В этом случае моменты вращения на валу, создаваемые при подъеме и опускании понтонов, будут равны.
Понтоны устанавливаются так, чтобы под воздействием волн они могли совершать колебания только вертикально, вдоль направления стоек 30. Для уменьшения давления в горизонтальном направлении катамараны устанавливаются навстречу направления волн.
С понтонами неподвижно связаны вертикальные толкатели 32, которые с помощью толкателей 46 совершают только возвратно-поступательное движение в вертикальном направлении.
При этом первая и третья звезда с обгонными муфтами 34 и 36 установлены на первом валу. Эти звезды передают вращение на вал, когда толкатели 32 поднимают цепи 33 вверх. Вторая 35 и четвертая 37 звезды вращают через обгонные муфты второй вал 39. Это происходит при опускании толкателей 32 и связанных с ними цепей 33, когда обгонные муфты и связанные с ними звезды 35, 37, установленные на втором валу, создают вращающий момент на валу 39, верхние звезды свободно крутятся на первом валу 38.
Таким образом, при подъеме цепей 33 вращается первый вал, а при их опускании - второй вал.
Возвратно-поступательное движение толкателей 32 и связанных с ними цепей 33 осуществляется с помощью понтонов 31. Понтоны имеют положительную плавучесть. Вес понтонов должен быть таким, чтобы обеспечить полное их погружение. При этом моменты вращения, создаваемые при подъеме и опускании понтонов, становятся одинаковыми. Форма понтонов должна быть обтекаемая, типа подводной лодки. В качестве понтонов можно использовать катамораны - водные велосипеды. Для исключения вращения понтонов вокруг стоек 30 используются неподвижные направляющие 46, на первом 38 и на втором 39 валах установлены неподвижная первая 40 и вторая 41 шестерни. Эти шестерни одинаковые и входят в сцепление друг с другом. Развязка между вращением шестерен и вращением звезд 34-37 осуществляется при помощи обгонных муфт. Вращение шестерен происходит в одном и том же направлении. На первом - выходном валу 38 установлен маховик 42. Маховик повышает равномерность вращения выходного вала. Вращение выходного вала через мультипликатор 43 передается на электрогенератор 44. Мультипликатор служит для повышения скорости вращения вала и согласования его со скоростью вращения ротора электрогенератора. Для установки мультипликатора и генератора служит неподвижная подставка 45. Предложенный преобразователь энергии волн в электрическую энергию позволит решить проблему берегозащиты морей.
Предложенный преобразователь движения может быть использован для создания бесшатунно-кривошипного четырехтактного двигателя внутреннего сгорания.
Источники информации
1. Механизм для преобразования возвратно-поступательного движения во вращательное и наоборот. Патент по заявке 5008186/28, 30.09.94, Бюл. №18.
2. Пономарев А.В. Преобразователь вращательного движения в возвратно-поступательное и наоборот. RU 2002106181/11, 7 F16Н 21/22, Пат. №2215919, Бюл. №31, 2003.
3. Чоповский Б.П., Козулин В.Б. Двигатель внутреннего сгорания. RU 2002126052/06, 7 F02B 33/00, 30.09.2002.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ДВИЖЕНИЯ АЛИЕВЫХ | 2007 |
|
RU2349814C1 |
| ПРЕОБРАЗОВАТЕЛЬ ДВИЖЕНИЯ | 2009 |
|
RU2386066C1 |
| ШАГАЮЩИЙ ВЕЗДЕХОД | 2007 |
|
RU2356775C2 |
| ШАГАЮЩАЯ ИНВАЛИДНАЯ КОЛЯСКА | 2009 |
|
RU2404900C1 |
| ВОЛНОВОЕ ЭНЕРГЕТИЧЕСКОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2008 |
|
RU2373424C1 |
| КОСИЛКА | 2009 |
|
RU2406287C1 |
| ДОРОЖНОЕ ЭНЕРГЕТИЧЕСКОЕ УСТРОЙСТВО | 2007 |
|
RU2379550C2 |
| ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ ВОЛН | 2005 |
|
RU2300663C1 |
| ВОЛНОВОЙ ДВИГАТЕЛЬ (ВАРИАНТЫ) | 2006 |
|
RU2329396C2 |
| ВЕЛОСИПЕД (ВАРИАНТЫ) | 2009 |
|
RU2404901C2 |

Изобретение относится к машиностроению, а именно к механизмам для преобразования возвратно-поступательного движения во вращательное и наоборот, и может быть использовано в двигателях внутреннего сгорания, а также в насосах и компрессорах объемного типа. Преобразователь движения содержит четыре цилиндра, расположенные попарно. Поршни взаимно противоположных цилиндров связаны друг с другом неподвижно штангой. Преобразователь содержит первую и вторую пару неподвижно связанных параллельных зубчатых реек, находящихся в зацеплении с соответствующими сегментными шестернями, установленными неподвижно на одном выходном валу. В каждой сегментной шестерне зубья занимают менее половины делительной окружности на 180°. Сегментные шестерни, взаимодействующие с соответствующими зубчатыми рейками, сдвинуты относительно друг друга на определенный угол, преимущественно на 90°. Достигается увеличение КПД. 2 з.п. ф-лы, 6 ил., 1 табл.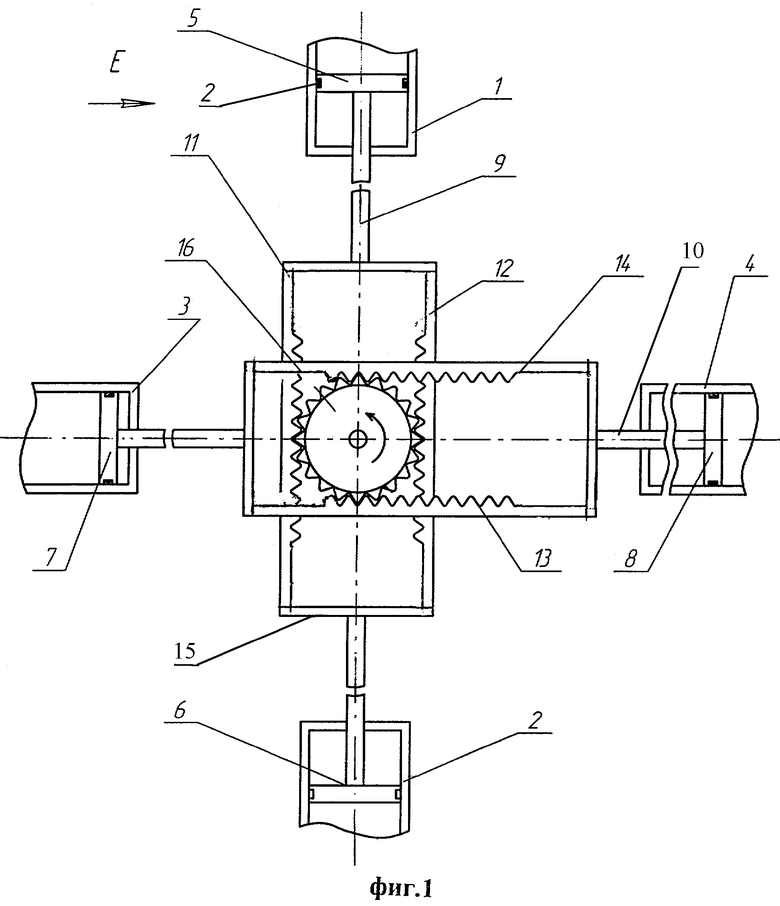
| RU 2002126052 A, 10.02.2004 | |||
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ ПОРШНЕВОГО ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1993 |
|
RU2103532C1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| СПОСОБ ПОЛУЧЕНИЯ МОДИФИЦИРОВАННЫХ СВЯЗУЮЩИХ И ПРОПИТОЧНЫХ ПЕКОВ | 2023 |
|
RU2824121C1 |
| СПОСОБ СТОПОРЕНИЯ РЕЗЬБОВОГО СОЕДИНЕНИЯ ДЕТАЛЕЙ ИЗ УГЛЕРОДНЫХ МАТЕРИАЛОВ | 2015 |
|
RU2608711C1 |

