зонтальной гибки, причем механизм горизонтальной гибки включает ползун, два двуплечих рычага и два гибочных ролика, каждый из которых закреплён нТШбТШтст- вующем конце каждого рычага, гибочный шаблон, средства поджима гибочных роликов к шаблону, механизм вертикальной гибки включает ползун, два рычага, каждый из которых одним концом связан с ползуном, два гибочных элемента, каждый из которых закреплен на свободном конце каждого рычага и шаблона. Оно снабжено качающимся захватом, закрепленным на станине. Механизм горизонтальной гибки снабжШГдвумя подпружиненными фиксаторами, установленными на боковых поверхностях ползуна симметрично относительно его оси. При этом шаблон механизма горизонтальной гибки выполнен с пазом на передней части и закреплен на его ползуне. Двуплечие рычаги шарнирно закреплены на станине, а средство поджима гибочных роликов к шаблону выполнено в виде двух подп ружинен- ных упоров, закрепленных на свободных концах двуплечих рычагов. Шаблоны механизма вертикальной гибки установлены на подвижной плите между матрицами и цилиндрами двойного действия, а качающий- ся захват установлен с воШбжТТостью захода в паз шаблона механизма горизонтальной гибки.
Недостатком устройства является низкая производительность труда, обусловленная необходимостью проведения дополнительных операций, направленных на возврат боковых граней изделия отклонившихся вследствие пружиняЪдих свойств металла от требуемого положения после выполнения П-образного гиба и отгибки концов в плоскости, перпендикулярной П-образно изогнутому изделию
Цель изобретения - повышение производительности, расширение технологических возможностей и повышение качества изделий.
Это достигается тем, что в устройстве для пространственной гибки заготовок из проката, содержащем размещенные на станине механизмы П-образной гибки, включающий два двуплечих рычага с гибочными роликами, каждый из которых закреплен на соответствующем плече рычага, гибочный шаблон, средство поджима гибочных роликов к шаблону, сталкиватель готового изделия, силовой цилиндр и механизм отгибки концов заготовки, включающий шаблон, ги бочные ролики, силовой цилиндр для перемещения гибочных роликов, средство поджима гибочных роликов к шаблону механизма П-образной гибки выполнено в виде
подвижной траверсы, направляющих колонн, на которых смонтирована траверса, прижимной планки, установленной на траверсе, пружины для поджима планки к траверее, а двуплечие рычаги шарнирно закреплены на траверсе и свободными концами связаны с прижимной планкой, механизм отгибки концов заготовки снабжен дополнительным приводом в виде силового
0 цилиндра, Г-образными захватами заготовки, осью-водилом, установленным на штоке дополнительного силового цилиндра, двуплечими рычагами, шарнирно закрепленными на станине перед Г-образными
5 захватами, осями, одноплечими рычагами, смонтированными на станине посредством этих осей, пружинами кручения, осью, закрепленной на штоке силового цилиндра для перемещения гибочных роликов, на0 правляющими, выполненными в станине в виде фигурных пазов, размещенных в параллельных плоскостях, тягами, связанными с осью, закрепленной на штоке силового цилиндра с возможностью вертикального
5 перемещения. Причем эта ось установлена в фигурных пазах, а гибочные ролики - на этой оси, каждый Г-образный захват смонтирован на оси соответствующего одноплечего рычага и подпружинен относительно
0 последнего посредством пружины кручения, одно из плеч каждого двуплечего рычага и плечо каждого0 соответствующего одноплечего рычага насажены на ось-води- ло, а гибочный шаблон механизма отгибки
5 концов заготовки выполнен в виде обкатных роликов, каждый из которых смонтирован ни другом плече каждого двуплечего рычага, Сталкиватель готовых изделий выполнен в виде Г-образного рычага, смонтированного
0 на оси-водиле с возможностью поворота, пружинного фиксатора, для фиксации Г-образного рычага, штырей, установленных на станине с возможностью взаимодействия с Г-образным рычагом сталкивателя,
5 На боковых гранях гибочного шаблона механизма П-образной гцбки выполнены скосы.
Гибочные и обкатные ролики механизма отгибки концов заготовки выполнены с ко0 сыми ребордами и пазом.
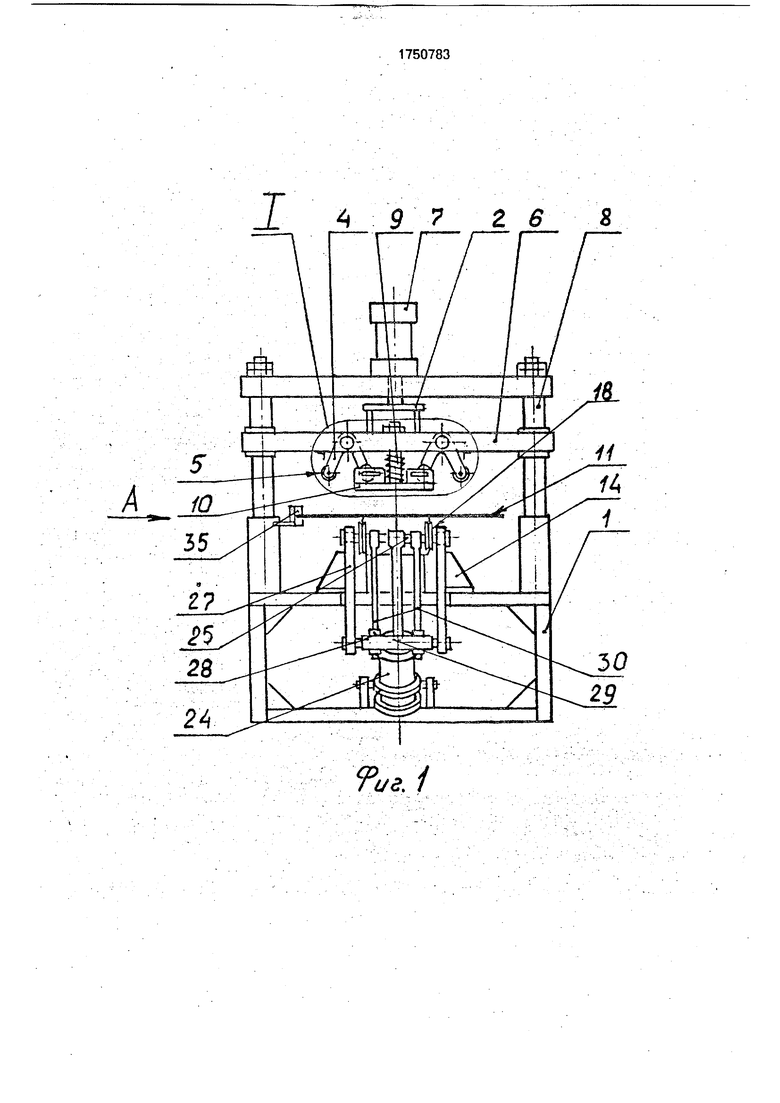
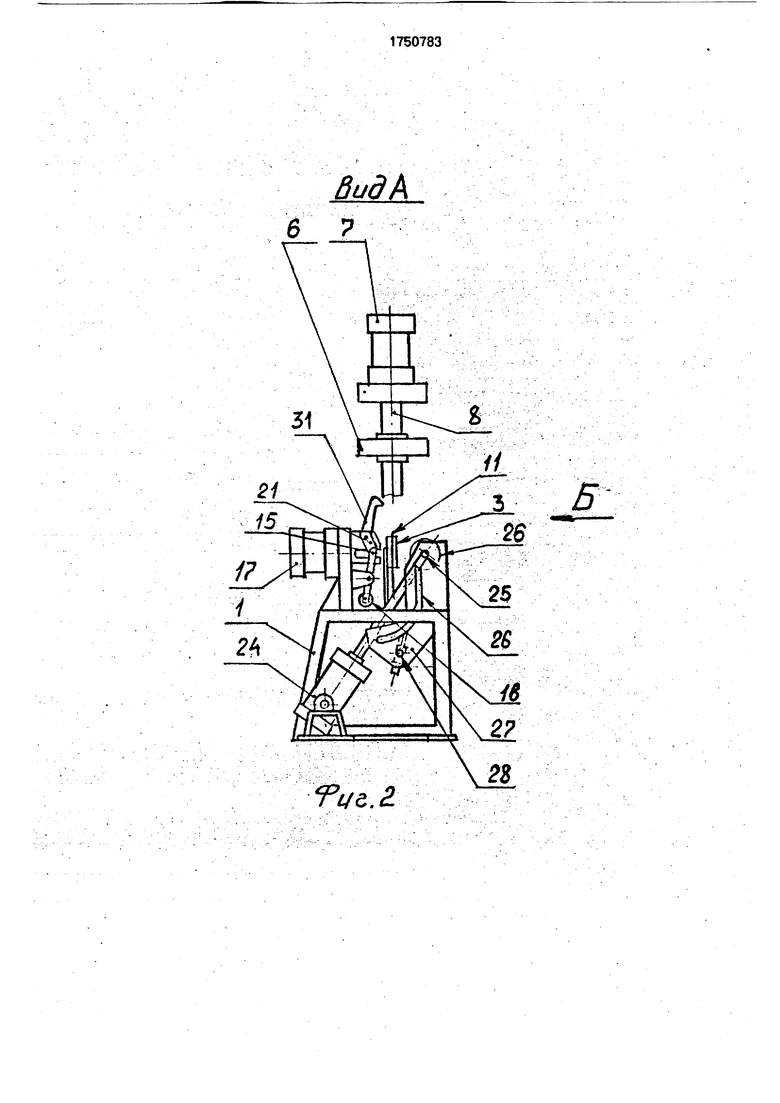
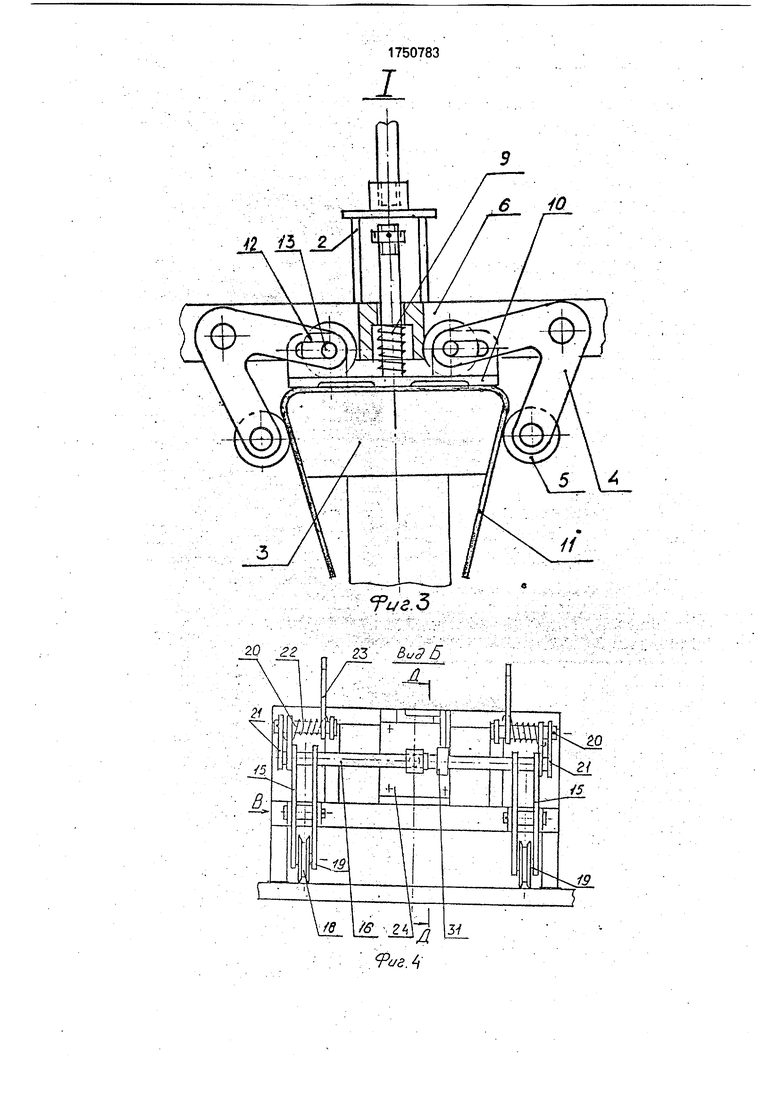
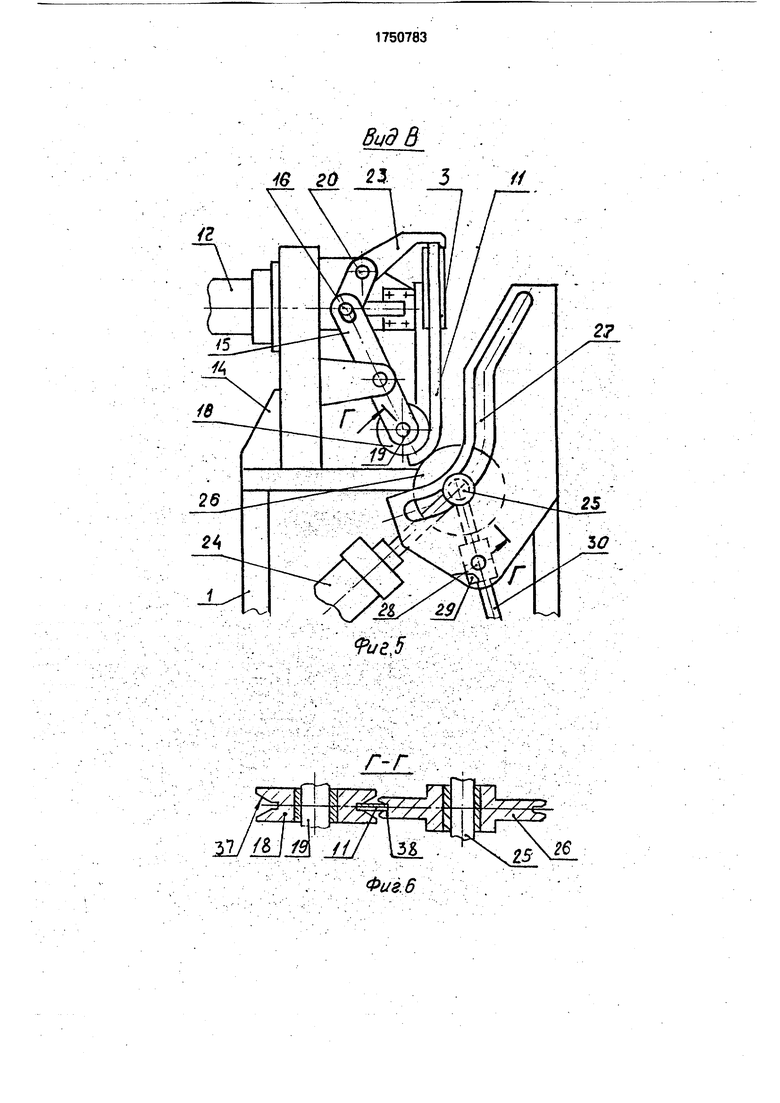
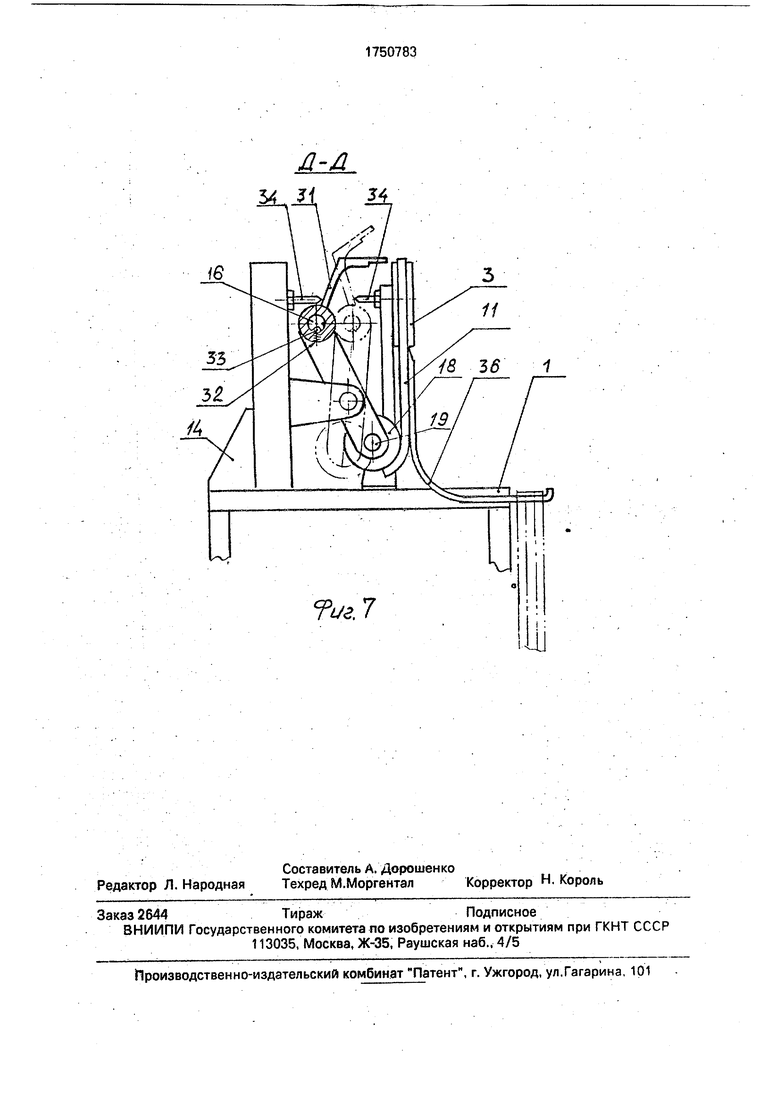
На фиг. 1 изображено устройство для пространственной гибки изделий из проката, общий вид; на,фиг. 2 - вид по стрелке А на фиг. 1; на фш. 3 - узел 1 на фиг. 1 (меха5 низм П-образной гибки изделий); на фиг. 4 - вид по стрелке Б на фиг; 2 (механизм отгибки концов изделий); на фиг. 5 - вид по стрелке В на фиг. 4; на фиг. б - разрез Г-Г на фиг, 6 (механизм сталкивания изделий); на фиг. 7 - разрез Д-Д на фиг. 4.
Устройство для пространственной гибки заготовок из проката содержит станину 1 с размещенными на ней механизмом П-об- разной гибки 2, состоящим из гибочного шаблона 3 двух двуплечих (V-образных) рычагов 4 с гибочными роликами 5, каждый из которых закреплен на соответствующем плече рычага, шарнирно закрепленного по траверсе 6, установленной с возможностью перемещения приводом 7 по направляю- щим колоннам 8. На подвижной траверсе 6 имеется подпружиненная пружиной 9 планка 10 для зажима изделий 11, имеющая пазы 12, в которых установлены с возможностью перемещения оси 13 с насаженными на них одним из плеч рычагами 4,
Механизм отгибки 14 концов изделия 11 содержит две пары двуплечих рычагов 15, шарнирно прикрепленных к станине 1 и одним концом подвешенных на оси-водиле 16, связанной с приводом 17, а на другом конце несущих обкатные ролики 18, насаженные на оси 19. Ось-водило 16 связано с осями 20 одноплечими рычагами 21, которые в свою очередь связаны пружиной кручения 22 с Г-образными прихватами 23 изделий 11.
На штоке привода 24 имеется ось 25 с роликами 26, концы которой установлены с возможностью перемещения в направляющих 27, выполненных в виде фигурных пазов, размещенных в параллельных плоскостях. Направляющие 27 связывают ось 25 с параллельно закрепленной ей осью 28, закрепленной с возможностью в ращения в направляющих 27 и снабженной втулкой 29, в которые с возможностью вертикального перемещения вставлены тяги 30, подвешенные свободным, концом на ось 25 и служащие для осуществления совместного перемещения оси 25 и оси 28 без перекосов.
На ось-водило 16с возможностью поворота насажен сталкиватель 31, выполненный в виде Г-образного рычага, для фиксации которого в одном из двух положений (исходное и откинутое для беспрепятст- венной установки на шаблон 3 следующей заготовки изделия 11) служит шариковый фиксатор 32, состоящий из подпружиненного шарика 33, при этом сталкиватель 31 установлен нарси-водиле 16с возможностью взаимодействия со штырями 34 (левым и правым см. фиг. 5).
Для установки заготовки 11 в рабочем положении служит упор 35, а для приема готового изделия 11 крюк 36. Обкатные ро- лики 18 и гибочные ролики 26 имеют косые реборды 37 и паз 38, а на боковых гранях гибочного шаблона механизма П-образной гибки выполнены скосы.
Устройство для пространственной гибки заготовок из проката работает следующим образом.
Заготовка изделия 11 укладывается на гибочный шаблон 3 до упора 35, включается привод 7 перемещения траверсы б по направляющим колонкам 8.
Подпружиненная планка 10 зажимает заготовку изделия 11, поджимая ролики 5 к гибочному шаблону 3.
При дальнейшем перемещении траверсы 6 пружина 9 сжимается, V-образные рычаги 4 поворачиваются вокруг своих осей и, обкатываясь по шаблону 3, производят П- обрэзную гибку изделия 11. Затем производится перемещение траверсы 6 вверх приводом 7, а изделие 11 остается на шаблоне 3.
Для отгибки концов изделия 11 в плоскости, перпендикулярной П-образному ги- бу, включается привод 17, шток которого перемещает ось-водило 16с закрепленными на ней Г-образными прихватами 23, зажимающими изделие 11 прежде, чем к нему будет подведен ролик f8.
Ролики 18 и 26 посредством имеющихся косых реборд 37 и паза 38 произведут возврат концов изделия в вертикальное положение и их фиксирование в случае, если после П-образного гиба произошло отклонение вследствие пружиненйя изделия, при этом конец изделия, направляемый косой ребордой 37 ролика 18, попадает в его паз 38 и при подводе ролика 26 займет вертикальное положение и зафиксируется в пазу 38 ролика 18 и ролика 26,
Предохранение прихватов 23 от поломки при дальнейшем перемещении оси-води- ла 16 (изделие 11 зажато прихватами 23) осуществляется за счет упругости пружины 22 кручения. Затем включается привод 24, шток которого перемещает ось 25 в направляющих 27. Ось 25 перемещается совместно с осью 28, поворачивающейся в направляющих 27, при этом ролики 26, проивзаимодей- ствовав с изделием, поджатым роликом 18, отгибают концы изделия и продолжают движение согласнотраекТории, задаваемой направляющими 27 для вывода из рабочей зоны, чтобы беспрепятственно снять готовое изделие. Привод 17 переключается на перемещение оси-водила 16 в обратном направлении, при котором производится отвод от изделия Г-образных прихватов 23, отвод роликов 18 в нерабочее положение и сброс готового изделия на приемный крюк 36 сталкивателем 31, который сбрасывает готовое изделие с гибочного шаблона 3 раньше, чем выбран полный ход штока привода 17 и перемещается осью-водилом 16 дальше до упора в штырь 34 (правый).
При этом сталкиватель 31, повернувшись на оси 16, откинется и зафиксируется пружинным фиксатором 32 при заходе шарика 33 в одну из двух лунок, выполненных на оси-водиле 1 б в местах фиксации (исходом или в положении откидывания). Таким образом, за один ход штока привода 17 производится сбрасывание изделия 11 и откидывание сталкивателя 31 для освобождения гибочного шаблона 3 под установку следующей заготовки изделия 11.
При обратном ходе штока привода 17 сталкиватель 31, соприкоснувшись со штырем 34 (левым), возвращается фиксатором 32 в исходное положение, а Г-образный прихват 23 зажимает следующую заготовку изделия.
Предлагаемое устройство позволяет повысить производительность за счет совмещения операции возврата боковых граней изделия после П-образного гиба в требуемое положение и фиксации их при отгибе концов изделия с помощью направляющих косых реборд и пазов на гибочных и обкатных роликах механизма отгиба концов изделия. 1 . - : .. .
Кроме того, устройство позволяет изготавливать П-образные заготовки из материала с пружинящими свойствами и отгибать концы изделия в плоскости, перпендикуляр- .ной П-образно изогнутому изделию, так как в устройстве предусмотрен гибочный шаблон со скосами, что позволяет боковые сто- роны П-образнб изогнутого изделия возвратить в требуемое положение, при котором стороны изделия параллельны друг другу и вследствие наличия у гибочных и обкатных роликов направляющих косых реборд и пазов отклонившиеся от вертикального положения бокЬвые стЬгронЙ изделия возвращаются в требуемое положение и фиксируются, что расширяет технологические возможности устройства и повышает качество изделий.
Формула изобретени я 1. Устройство для пространственной гибки заготовок из проката, содержащее размещенные на станине механизм П-образной гибки, включающий два двуплечих рычага с гибочными роликами, каждый из которых закреплен на соответствующем плече рычага, гибочный шаблон,, средство поджима гибочных роликов к шаблону, сталкиватель готового изделия, силовой цилиндр и механизм отгибки концов заготовки, включающий шаблон, гибочные ролики, силовой цилиндр для перемещения
гибочных роликов, отличающееся тем, что, с целью повышения производительности, средство поджима гибочных роликов к шаблону механизма П-образной гибки
выполнено в виде подвижной траверсы, направляющих колонн, на которых смонтирована траверса, прижимной планки, установленной на траверсе, пружины для поджима планки к траверсе, а двуплечие
0 рычаги шарнирно закреплены на траверсе и своими свободными концами связаны с прижимной планкой, механизм отгибки концов заготовки снабжен дополнительным приводом в виде силового цилиндра, Г-образными
5 захватами заготовки, осью-водилом, установленным на штоке дополнительного силового цилиндра, двуплечими рычагами, шарнирно закрепленными на станине перед Г-образными захватами, осями, одно0 плечими рычагами, смонтированными на станине посредством этих осей, пружинами кручения, осью, закрепленной на штоке силового цилиндра для перемещения гибочных роликов, направляющими, выполнен5 ными в станине в виде фигурных пазов, размещенных в параллельных плоскостях, тягами, связанными с осью, закрепленной на штоке силового цилиндра с возможностью вертикального перемещения, причем
0 эта ось установлена в фигурных пгазах, а гибочные ролики - .на этой оси, каждый Г-образный захват смонтирован на оси соответствующего одноплечего рычага и под- пружимей относительно последнего
5 посредством пружины кручения, одно из плеч каждого двуплечего рычага и плечо каждого соответствующего одноплечего рычага насажены на ось-водило, а гибочный шаблон механизма отгибки концов заготов0 ки выполнен в виде обкатных роликов, каждый из которых смонтирован на другом . пле че каждого двуплечего рычага, сталкива- тёль готовых изделий выполнен в виде Г-об- разного рычага, смонтированного на
5 оси-водиле с возможностью поворота, пружинного фиксатора для фиксации Г-образ- ного рычага, штырей, установленных на станине с возможностью взаимодействия с Г-образным рычагом сталкивателя.
0 2. Устройство по п. 1, о т л и ч а ю щ е е- с я тем, что, с целью расширения технологических возможностей и повышения качества изделий, на боковых гранях гибочного шаблона механизма П-образной гибки вы5 полнены скосы.
3. Устройство по п. 1,отличающееся тем, что, с целью повышения качества изделий, гибочные и обкатные ролики механизма отгибки концов заготовки выполнены с косыми ребордами и пазом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для пространственной гибки изделий из трубной заготовки | 1986 |
|
SU1338925A1 |
| Устройство для пространственной гибки | 1988 |
|
SU1538952A1 |
| Устройство для гибки профильного проката | 1986 |
|
SU1333438A1 |
| Автомат для изготовления двухспиральных пружин с отогнутыми концами | 1985 |
|
SU1294442A1 |
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| Машина для гибки труб | 1975 |
|
SU564044A1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ ЗАГОТОВОК | 1993 |
|
RU2043178C1 |
| Станок для изготовления деталей с двумя отогнутыми концами, преимущественно рулей велосипедов | 1988 |
|
SU1530287A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ СЛОЖНОЙ ФОРМЫ ИЗ ДЛИННОМЕРНЫХ ТРУБНЫХ ПЛЕТЕЙ И ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2038886C1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ИЗОГНУТЫХ ТРУБ | 2016 |
|
RU2622197C1 |
Риг.1
Тчй.г.
Б
. „& . &«дБ
7Vc.3
Фиг.Ь
MA
4В гО 23 5
а
11
2
25
iM.ii 30
Фиг,5
Г-Г
/ /
-/i
ПТрЗт-г
/, ч / / /
/г&
25
26
д-д
Ti/e.7
