Предлагаемое изобретение относится к рыбопромысловой технике и предназначено для использования на судах рыболовного и научно-исследовательского флота для поиска и обнаружения рыбы и других объектов лова.
Известны устройства для поиска и обнаружения рыбы, например судовые бортовые и буксируемые гидроакустические рыбопоисковые приборы-эхолоты, содержащие излучающе-приемную систему (систему излучения акустических локационных импульсов и приема отраженных сигналов), блок обработки принятых отраженных сигналов (эхосигналов) и блок отображения гидроакустической информации о рыбе со схемой запуска излучающе-приемной системы /см., например, 1, 2/.
Основным недостатком таких устройств являются весьма ограниченные возможности обнаружения придонных и донных рыб и других объектов промысла, находящихся вблизи дна /3, 4, 5/.
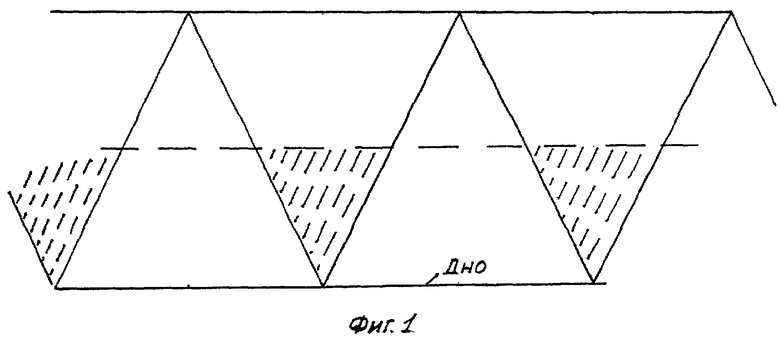
Наиболее близким к предлагаемому является устройство для поиска и обнаружения рыбы, содержащее n-е количество подводных эхолокационных датчиков вертикального зондирования с акустическими антеннами /6/. Оно характеризуется большей эффективностью обнаружения, однако, как можно видеть из фиг.1, остаются непросматриваемые зоны (заштрихованные), т.е. эффективность все-таки недостаточна. Соответственно, будет недостаточной и достоверность определения фактического количества рыбы в придонных слоях водной среды.
Целью предлагаемого устройства является повышение эффективности обнаружения рыб и других промысловых объектов в придонном слое и достоверности получаемой информации (данных) об их действительном количестве.
Поставленная цель достигается тем, что акустическая излучающе-приемная система из n-го количества эхолотных датчиков устройства для поиска и обнаружения рыбы выполнена с пересечением зон действия соседних (смежных) эхолотных датчиков (характеристик направленности их акустических антенн), акустические антенны каждого из эхолотных датчиков выполнены 2-х или 3-х секционными вдоль линии, проходящей через последовательность эхолотных датчиков, каждый из эхолотных датчиков снабжен двумя дополнительными каналами приема отраженных сигналов, а система обработки, хранения, представления и отображения получаемой информации снабжена блоком разделения принимаемых каждым из эхолотных датчиков эхосигналов от обнаруженных рыб, поступающих с левой и правой частей их зон обнаружения относительно вертикальных плоскостей, проходящих через общие оси акустических антенн каждого из эхолотных датчиков и перпендикулярных линии, проходящей через их (эхолотных датчиков) последовательность, и блоком выделения эхосигналов от одних и тех же рыб, принятых соседними (смежными) эхолотными датчиками, причем входы дополнительных каналов приема отраженных сигналов подключены к секциям акустических антенн, а выходы - к линии связи между эхолотными датчиками и системой обработки, генераторы и основные приемные каналы каждого из эхолотных датчиков подключены ко всей антенне, первый дополнительный приемный канал соединен с одной из секций антенны, второй - с второй (при трех секциях антенны каждый из дополнительных приемных каналов соединен с одной из крайних секций), один вход блока разделения эхосигналов соединен со схемой запуска эхолотных датчиков, которая также подключена к входам генераторов эхолокационных датчиков, блоку разделения эхосигналов, блоку выделения эхосигналов от одних и тех же рыб и блоку обработки, второй вход блока разделения - с выходом основного приемного канала, третий - с выходом первого дополнительного приемного канала, четвертый - с выходом второго дополнительного приемного канала, выходы блока разделения эхосигналов подключены к входу блока выделения эхо от одних и тех же рыб, а выход блока выделения соединен с блоком обработки, хранения, представления и отображения данных.
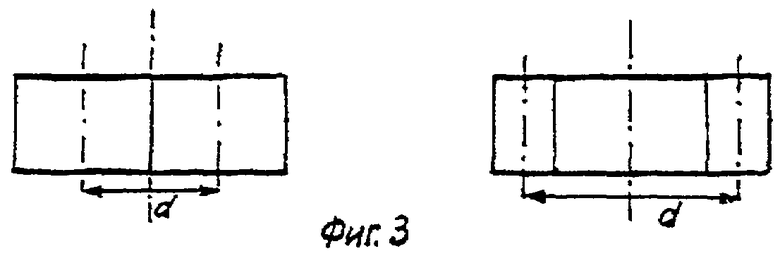
Исполнение устройства с пересечением характеристик направленности антенн (зон действия эхолотных датчиков) позволяет существенно сократить непросматриваемые зоны (фиг.2 - заштрихованная), т.е. повысить эффективность обнаружения рыб в придонном слое, однако достоверность получения информации о фактическом количестве рыбы не увеличивается, так как от одной и той же рыбы в этой зоне могут быть приняты эхосигналы двумя соседними (смежными) эхолотными датчиками, и число рыб будет больше, чем фактическое.
Введение блока разделения принимаемых эхосигналов от рыб, находящихся слева и справа относительно перпендикулярных плоскостей, проходящих через основную ось антенны каждого из эхолокационных датчиков, и блока выделения эхосигналов от одних и тех же рыб, принимаемых соседними эхолотными датчиками, обеспечивает повышение достоверности определения количества рыб в выбранном придонном слое.
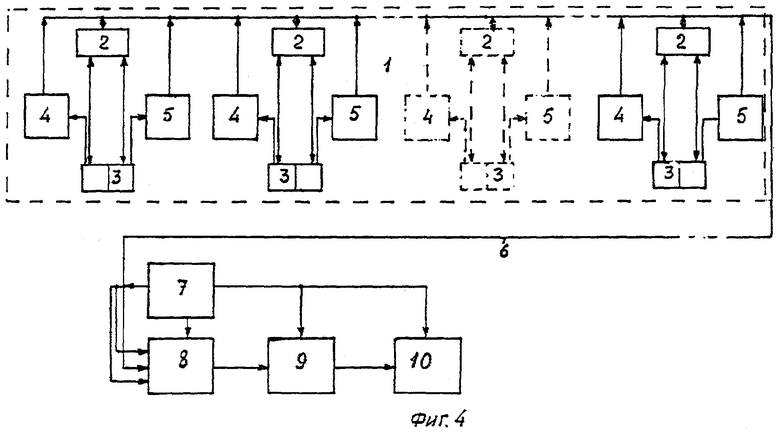
Трехсекционное исполнение акустических антенн целесообразно для ряда практических реализаций исходя из необходимой точности измерения разностей времени прихода эхосигналов ко всей антенне и к ее секциям, так как при одинаковом общем размере антенны база d (измерительная) между секциями увеличивается (фиг.3).
На чертеже (фиг.4) представлена функциональная схема, поясняющая построение и работу предлагаемого устройства. Оно включает n подводных эхолокационных датчиков 1, каждый из которых содержит излучающе-приемный тракт 2, двух- или трехсекционную акустическую антенну 3, первый дополнительный приемный канал 4 и второй дополнительный приемный канал 5, линию связи 6, надводную электронную компьютизированную систему обработки, хранения, представления и отображения информации, содержащую схему запуска 7 эхолотных датчиков, блок 8 разделения эхосигналов от рыб, находящихся слева и справа от перпендикулярных последовательности датчиков плоскостей, проходящих через ось каждого из эхолотных датчиков, блок 9 выделения эхосигналов от одних и тех же рыб, принимаемых смежными датчиками, и блок 10 обработки, хранения, представления и отображения данных.
Работа предлагаемого устройства для поиска и обнаружения рыбы осуществляется следующим образом. По сигналу со схемы 7 запускается первый эхолокационный датчик последовательности n датчиков 1. Указанный импульс также подается на блоки 8, 9, 10 для синхронизации их работы. С излучающе-приемного тракта 2 подается импульс на всю антенну 3 первого датчика, излучающую импульс акустических колебаний в направлении дна. Отраженные от рыбы и принятые всей антенной 3 и ее секциями сигналы через линию связи 6 передаются в надводную систему к блоку 8. Они передаются на разных несущих частотах для разделения приемных каналов. Всей антенной и трактом 2 определяется зона обнаружения (более узконаправленная характеристика I на фиг.2), тогда как ее секции и их приемные каналы используются для обеспечения разделения эхосигналов от рыб, находящихся в левой и правой частях зоны обнаружения I (см. фиг.2).
Указанное разделение выполняется блоком 8 исходя из разности времени прихода эхосигнала от рыбы к всей антенне и к более удаленной от рыбы секции посредством стробирования. По переднему фронту импульса запуска первого датчика начинает работать формирователь стробов в блоке 8, на который поступают эхосигналы с более узконаправленного (I на фиг.2) приемного тракта обнаружения. По переднему фронту эхо формируется строб, который подается на две схемы совпадения в блоке 8, на второй вход которых поступают эхо с более широконаправленных (II на фиг.2) секций антенны 3 и соответствующих приемных каналов, на одну с левого канала 4 (см. фиг.2), на вторую - с правого 5. При нахождении рыбы в правой части зоны обнаружения (см. фиг.2) эхосигналы от нее будут приходить позднее к левой секции антенны 3 и вырабатывается сигнал на запоминание соответствующего эхосигнала в правой буферной схеме памяти блока 8 и т.д. В результате эхо от рыб, находящихся в правой части зоны обнаружения (относительно центральной оси антенны - см. фиг.2, 3), будут запомнены в правой буферной схеме памяти блока 8, находящихся в левой части - в левой. При нахождении рыбы на центральной оси антенны эхо к ее секциям поступят одновременно, отдельной схемой блока 8 фиксируется данная ситуация и соответствующий эхосигнал будет запомнен в одной из буферных схем памяти, к примеру, в левой. Эхосигналы с левой буферной схемы памяти блока 8 поступают в блок 9, где далее формируется последовательность эхосигналов от рыб, которые будут отнесены к первому эхолокационному датчику последовательности 1. Эхо из правой буферной схемы памяти также подаются в блок 9.
Следующим импульсом со схемы 7 запускается второй датчик последовательности 1. Блоком 8 производится разделение принятых вторым датчиком эхо по буферным схемам памяти тем же способом, как это выполнялось при работе первого датчика. Далее блоком 9 производится операция выделения эхосигналов от одних и тех же рыб, принятых первым и вторым датчиками с использованием компьютерных технологий и соответствующих алгоритмов. Для этого проводится анализ хранящихся в блоке 9 эхосигналов от рыб с правой части зоны обнаружения первого датчика и с левой части зоны обнаружения второго датчика (см. фиг.2). При этом используется следующий критерий. Для всех рыб, находящихся в правой части характеристики направленности антенны (зоны действия) первого датчика (см. фиг.2), до линии АВ имеется жесткая связь между разностью времени Δt прихода эхо от рыбы ко всей антенне и ее левой секции и расстоянием r от данной рыбы до антенны. Пусть, к примеру, рыба находится в точке А. Расстояние от точки А (и всех точек на линии АВ) до антенны (ОА) датчика известно исходя из известных дистанции между соседними датчиками и ширины характеристики направленности всей антенны. Если, например, по результатам измерения получили разность времени Δt' прихода эхо от рыбы в точке А, а расстояние от нее до антенны меньше или равно величине ОА, то рыбу можно считать учитываемой лишь первым эхолокационным датчиком. Если же оно превышает величину ОА, то - вторым. Таким образом, одновременно с измерением Δt производится измерение расстояния до рыбы и результаты сравниваются с введенными в устройство (в блок 9) данными о соответствующих расстояниях от антенны (точка О) до линии АВ. Если расстояние для измеренной Δt меньше соответствующей дистанции до линии АВ или равно ей, то эхосигнал будет отнесен к первому эхолотному датчику, если больше - к второму, т.е. будет обеспечено выделение одной и той же рыбы, фиксируемой соседними датчиками, и отнесение ее лишь к одному из датчиков.
Для обеспечения большей достоверности выделения эхосигналов от одних и тех же рыб, принятых соседними датчиками, в блоке 9 также предусмотрены схемные решения для реализации дополнительных критериев и соответствующих алгоритмов решения (с учетом предварительного селектирования эхо исходя из максимально возможных разностей Δrмакс расстояний от рыбы до всей антенны и ее секций или до антенн смежных датчиков). Они базируются на разностях амплитуд и длительностей эхо от рыбы. Наибольшая величина Δrмакс равна d (см. фиг.3) при ширине характеристики направленности антенны 180 градусов. Так как реальная ширина характеристики направленности существенно меньше, то и Δrмакс не может быть большой. Поэтому амплитуды и длительности эхосигналов от одних и тех же рыб в данном случае (при озвучивании сверху или наклонном), в основном, не могут значительно различаться (это может иметь место лишь при озвучивании рыб с хвоста или сбоку, т.е., как правило, при горизонтальном лоцировании). В результате, если разность оказывается существенной, это с большой вероятностью означает, что рыбы разные.
Для компенсации возможных флюктуаций линии АВ (вправо или влево) из-за "нежесткости" границ зон действия эхолотных датчиков в блоке 9 дополнительно производится измерение дистанций от рыб вблизи линии АВ до смежных датчиков (предварительно отселектированных с помощью формирователей стробов). Если получаемая разность находится в выбранных пределах, считается, что это одна и та же рыба, и она учитывается лишь в одном из датчиков.
В результате после срабатывания первого и второго эхолотных датчиков в общую формируемую в блоке 9 последовательность эхосигналов первого датчика будут занесены все эхо от рыб, принятых с левой части его зоны обнаружения, часть эхо с правой части его зоны обнаружения и часть эхо от одних и тех же рыб, принятых из общей зоны обнаружения обоих смежных датчиков. Она передается в блок 10. Затем запускается третий датчик, блоком 8 производится их разделение, блоком 9 выделение эхо от одних и тех же рыб, находящихся в правой части зоны обнаружения второго датчика и в левой - третьего и т.д.
Таким образом, с помощью предлагаемого устройства обеспечивается как существенное повышение эффективности обнаружения рыб в придонных слоях водной среды, так и достоверности в оценке их количества в указанной зоне.
Источники информации
1. Тикунов А.И. Рыбопоисковые и электрорадионавигационные приборы. Изд-во "Агропромиздат", 1985 г., с.98-107.
2. Придонная индикация устройством с импульсом запуска. Патент ФРГ №1516639, опубл. 19.03.1970.
3. Юданов К.И. Гидроакустическая разведка рыбы. С.Петербург, изд-во "Судостроение", 1992 г., с.186.
4. Усовершенствование аппаратуры подводного наблюдения. Патент Великобритании №998489, опубл. 04.07.1965.
5. Заферман М.Л. Погрешности инструментальной оценки запасов рыб.// Рыб. хоз-во, 1994, №3, с.30-32.
6. Устройство для поиска рыбы. Патент РФ №2229226, опубл. 27.05.2004.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ ПАРАМЕТРОВ ТРАЛА | 2010 |
|
RU2447458C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА РЫБЫ | 2002 |
|
RU2229226C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ РАЗМЕРОВ РЫБ В ПРОЦЕССЕ ИХ ПОИСКА | 2008 |
|
RU2367151C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОИСКА И ПОДСЧЁТА РЫБЫ | 2010 |
|
RU2421755C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЛУБИН И ЭХОЛОТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2614854C2 |
| Устройство для регистрации сигналов траловых зондов | 1977 |
|
SU662948A2 |
| Устройство для регистрации сигналов траловых зондов | 1976 |
|
SU641470A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАЗМЕРНО-КОЛИЧЕСТВЕННЫХ ХАРАКТЕРИСТИК ВЗВЕШЕННЫХ В ВОДЕ ЧАСТИЦ | 2012 |
|
RU2524560C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УЛОВИСТОСТИ ТРАЛА | 2007 |
|
RU2346432C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА И ПОДСЧЁТА РЫБЫ | 2014 |
|
RU2558003C1 |
Изобретение относится к рыбопромысловой технике и предназначено для использования на судах рыболовного и научно-исследовательского флота для поиска и обнаружения рыбы и других объектов лова. Технический результат заключается в повышении эффективности обнаружения рыб и других объектов промысла. Устройство содержит подводную акустическую излучающе-приемную систему и надводную электронную систему обработки, хранения, представления и отображения принятой акустической информации, причем подводная акустическая излучающе-приемная система состоит из n-го количества эхолокационных датчиков вертикального зондирования, акустические антенны каждого из упомянутых датчиков выполнены двух- или трехсекционными, каждый из эхолокационных датчиков вертикального зондирования снабжен помимо основного двумя дополнительными каналами приема отраженных сигналов, упомянутая надводная электронная система содержит схему запуска, блок разделения эхосигналов от рыб, блок выделения эхосигналов от одних и тех же рыб и блок обработки, хранения, представления и отображения данных. 4 ил.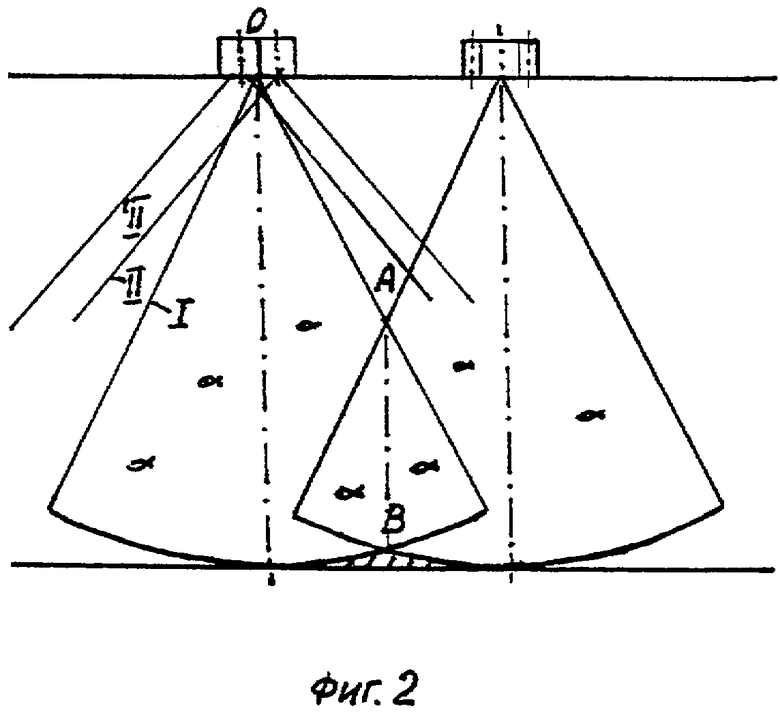
Устройство для поиска и обнаружения рыбы, включающее подводную акустическую излучающе-приемную систему из n-го количества эхолокационных датчиков вертикального зондирования, надводную электронную систему обработки, хранения, представления и отображения принятой акустической информации, содержащую схему запуска, отличающееся тем, что подводная акустическая излучающе-приемная система из n-го количества эхолокационных датчиков вертикального зондирования выполнена с пересечением зон действия соседних эхолокационных датчиков вертикального зондирования, акустические антенны каждого из эхолокационных датчиков вертикального зондирования выполнены двух- или трехсекционными вдоль линии, проходящей через последовательность эхолокационных датчиков вертикального зондирования, каждый из эхолокационных датчиков вертикального зондирования снабжен двумя дополнительными каналами приема отраженных сигналов, а надводная электронная система обработки, хранения, представления и отображения принятой акустической информации снабжена блоком разделения эхосигналов от рыб, которые принимаются каждым из эхолокационных датчиков и которые поступают с левой и правой частей их зон действия относительно вертикальных плоскостей, проходящих через общие оси акустических антенн каждого из эхолокационных датчиков вертикального зондирования и перпендикулярной линии, проходящей через их последовательность, блоком выделения эхосигналов от одних и тех же рыб, принятых соседними эхолокационными датчиками вертикального зондирования, и блоком обработки, хранения, представления и отображения данных, причем в случае двух секционных упомянутых акустических антенн вход первого из упомянутых дополнительных каналов соединен с одной секцией, а второй - со второй секцией, а в случае трехсекционных упомянутых акустических антенн вход каждого из упомянутых дополнительных каналов соединен с одной из крайних секций, выходы упомянутых дополнительных каналов - с линией связи между эхолокационными датчиками вертикального зондирования и системой обработки, хранения, представления и отображения принятой акустической информации, генераторы эхолокационных датчиков вертикального зондирования и основной приемный канал каждого из эхолокационных датчиков вертикального зондирования подключены ко всем секциям антенны каждого эхолокационного датчика вертикального зондирования, один вход блока разделения эхосигналов от рыб соединен со схемой запуска, которая также подключена линией связи к входам генераторов эхолокационных датчиков вертикального зондирования, блоку выделения эхосигналов от одних и тех же рыб и блоку обработки, хранения, представления и отображения данных, второй вход блока разделения эхосигналов от рыб подключен линией связи к выходу основного приемного канала, третий - линией связи к выходу первого дополнительного канала приема отраженных сигналов, четвертый - линией связи к выходу второго дополнительного канала приема отраженных сигналов, выход блока разделения эхосигналов от рыб подключен к входу блока выделения эхосигналов от одних и тех же рыб, а выход блока выделения эхосигналов от одних и тех же рыб соединен с блоком обработки, хранения, представления и отображения данных.
| УСТРОЙСТВО ДЛЯ ПОИСКА РЫБЫ | 2002 |
|
RU2229226C1 |
| US 6421299 B1, 16.07.2002 | |||
| JP 2003270329, 25.09.2003 | |||
| УСТРОЙСТВО КРАНА | 2006 |
|
RU2387907C2 |
| JP 2001161242, 19.06.2001. | |||

