Изобретение относится к области диагностики текущего состояния трубопроводов и может быть использовано в системах, осуществляющих мониторинг состояния магистральных трубопроводов, транспортирующих жидкие продукты, например нефть и нефтепродукты, в процессе их эксплуатации.
Среди систем данного назначения известны системы, основанные на использовании диагностических устройств, перемещающихся внутри трубопроводов со скоростью транспортировки продукта, см., например, [1] - RU №2066418 (C1), F 17 D 5/02, F 16 L 55/26, 10.09.1996, [2] - RU №2084757 (C1), F 17 D 5/00, 20.07.1997, [3] - RU №2106569 (C1), F 17 D 5/00, 10.03.1998, [4] - RU №2139469 (C1), F 17 D 5/00, G 01 N 29/00, G 01 N 27/87, 10.10.1999, [5] - RU №2137024 (C1), F 17 D 5/00, 10.09.1999, [6] - RU №2111453 (C1), G 01 B 17/00, F 17 D 5/00, F 16 L 57/00, 20.05.1998. Конструктивно диагностические устройства таких систем содержат один (см. [1]-[4]) или несколько (см. [5]-[6]) связанных между собой карданной сцепкой несущих модулей, перемещающихся внутри трубопровода по типу поршня за счет давления, оказываемого транспортируемым продуктом на эластичные манжеты, перекрывающие сечение трубопровода. Эластичные манжеты являются опорными элементами несущего модуля, обеспечивающими наряду с перемещением также центрирование несущего модуля внутри трубопровода. Конструктивно эластичные манжеты выполняются таким образом, что обеспечивается возможность прохождения несущего модуля через неровности и сужения в трубопроводе. В ряде случаев в дополнение к эластичным манжетам несущие модули оснащаются подпружиненными опорными колесами (см., например, [5] и [6]). Наличие опорных элементов, одновременно обеспечивающих центрирование и перемещение несущего модуля, делает конструкции диагностических устройств, описанных в [1]-[6], пригодными для применения в различных средах (газ, нефть, нефтепродукты), при этом среда влияет, в основном, на выбор методов и средств диагностики.
Несущие модули диагностических устройств, описанных в [1]-[6], несут диагностическое, навигационное и энергетическое оборудование, а также средства первичной обработки и хранения информации. Состав диагностического оборудования определяется применяемыми методами диагностики. Например, в диагностических устройствах, описанных в [3] и [4], диагностическое оборудование включает в себя средства ультразвуковой дефектоскопии, а в диагностическом устройстве, описанном в [6], диагностическое оборудование включает в себя комплекс для магнитной и ультразвуковой дефектоскопии. Энергетическое оборудование во всех случаях содержит в качестве первичного источника электропитания аккумуляторную батарею, а в некоторых случаях также дополнительный генератор с механическим приводом от опорных колес, например, как в диагностических устройствах, описанных в [5] и [6]. Навигационное оборудование содержит средства для определения текущего положения диагностического устройства внутри трубопровода. Например, в диагностическом устройстве, описанном в [6], в состав навигационного оборудования входят одометры с механическим приводом от опорных колес, определяющие пройденный путь, и гироскопы, определяющие угловое положение осей несущего модуля в определенной системе координат. Средства первичной обработки и хранения информации реализуются в виде бортового компьютера. Эти средства обеспечивают синхронизированный прием информации от диагностических датчиков и навигационного оборудования, а также первичную обработку и накопление обработанной информации в определенной форме в памяти бортового компьютера.
Характерной особенностью диагностических устройств, описанных в [1]-[6], является то, что в них не предусмотрена возможность оперативного съема информации в процессе перемещения устройств внутри трубопровода. Съем накопленной информации и ее окончательная обработка осуществляются после прохождения исследуемого участка трассы после того, как диагностическое устройство будет вынуто из приемной камеры, например, как это описано в [2], [3], [6]. При этом диагностическое устройство подключается к внешнему блоку приема и обработки диагностической информации, реализованному, например, в виде специализированного компьютера.
Другой особенностью диагностических устройств, описанных в [1]-[6], является то, что они перемещаются внутри трубопровода со скоростью, определяемой скоростью транспортировки продукта. Однако в ряде случаев, эта скорость является чрезмерно большой, что затрудняет проведение диагностических исследований с высокой точностью и качеством.
В случаях, когда для проведения высокоточных и высококачественных диагностических исследований требуется пониженная скорость или пошаговый режим перемещения, применяются системы, основанные на использовании диагностических устройств, перемещающихся внутри трубопроводов со скоростью меньшей, чем скорость транспортировки продукта. Для этого их несущие модули дополнительно оснащаются перепускными каналами, направляющими часть транспортируемого продукта в обход несущих модулей, а также средствами для регулирования скорости перемещения, см., например, [7] - RU №2172954 (С2), G 01 N 29/04, F 17 D 5/00, 27.08.2001, [8] - RU №2194918 (C1), F 17 D 5/00, F 16 L 55/26, 20.12.2002, [9] - RU №2109206 (C1), F 17 D 5/00, В 08 В 9/04, 20.04.1998.
Так, в диагностическом устройстве, описанном в [7], регулирование скорости перемещения осуществляется за счет поджатия к внутренней стенке трубопровода тормозных колодок, оснащенных гидроприводом. В диагностическом устройстве, описанном в [8], регулирование скорости перемещения осуществляется за счет регулирования гидравлического сопротивления перепускного канала. В диагностическом устройстве, описанном в [9], регулирование скорости перемещения осуществляется за счет поджатия к внутренней стенке трубопровода опорных элементов несущего модуля - упругих подушек или ласт, оснащенных гидроприводом.
Характерной особенностью диагностических устройств, перемещающихся внутри трубопровода со скоростью, меньшей, чем поток транспортируемого продукта, является возможность использования энергии этого потока для вращения бортовых электрических генераторов. Например, в диагностическом устройстве, описанном в [7], бортовой генератор приводится в движение турбиной, а в диагностическом устройстве, описанном в [9], - гидронасосом, приводимым в движение турбиной.
Как и в рассмотренных выше устройствах [1]-[6], применение в диагностических устройствах [7]-[9] опорных элементов, выполняющих одновременно функцию органов центрирования и органов перемещения, делает конструкции этих диагностических устройств пригодными для применения в различных средах (газ, нефть, нефтепродукты).
Характерной особенностью диагностических устройств [7]-[9], как и рассмотренных выше устройств [1]-[6], является то, что в них не предусмотрена возможность оперативного съема информации в процессе перемещения устройств внутри трубопровода. Съем накопленной информации и окончательная обработка осуществляются после прохождения исследуемого участка трассы после того, как устройство будет вынуто из приемной камеры. При этом диагностическое устройство подключается к внешнему блоку приема и обработки диагностической информации.
В качестве прототипа принята система внутритрубного обследования трубопроводов, известная из [10] - RU №2069288 (C1), F 17 D 5/02, 20.11.1996, в которой диагностическое устройство реализовано в виде моноблока - диагностического модуля, способного перемещаться по трубопроводу (нефтепроводу или газопроводу) под действием потока транспортируемого продукта со скоростью, меньшей, чем скорость транспортировки продукта.
Система-прототип содержит диагностический модуль, размещаемый внутри обследуемого трубопровода, транспортирующего жидкий или газообразный продукт, и внешний блок приема и обработки диагностической информации.
Внешний блок приема и обработки диагностической информации представляет собой специализированный компьютер, к которому подключается диагностический модуль после проведения диагностических исследований заданного участка трубопровода.
Диагностический модуль оснащен органами центрирования и перемещения, представляющими собой систему из упругой манжеты, расположенной в носовой части модуля и перекрывающей сечение трубопровода, и опорных колес. Перемещение осуществляется за счет давления, оказываемого транспортируемым продуктом на упругую манжету. Перемещение осуществляется со скоростью, более низкой, чем скорость транспортировки продукта, что обеспечивается байпасным патрубком, направляющим часть транспортируемого продукта в обход диагностического модуля.
Диагностический модуль несет бортовое оборудование, содержащее навигационный и диагностический блоки, блок первичной обработки и регистрации информации, а также блок управления скоростью перемещения. Входы блока первичной обработки и регистрации информации связаны с выходами навигационного и диагностического блоков. Вход блока управления скоростью перемещения связан с выходом навигационного блока, а выходы - с входами исполнительных устройств системы торможения. Бортовое оборудование содержит также источники бортового электропитания - аккумуляторную батарею и генератор с турбинным приводом.
Диагностический блок содержит оборудование, предназначенное для дефектоскопических исследований и формирования сигналов, несущих информацию о состоянии трубопровода, например о толщине стенки, наличии каверн и трещин. Конкретное выполнение диагностического блока определяется используемыми методами дефектоскопии.
Навигационный блок содержит оборудование, предназначенное для определения текущего местоположения устройства внутри трубопровода и формирования навигационных данных, позволяющих соотнести диагностическую информацию с конкретным участком трубопровода, тем самым определить координаты дефектов. В состав оборудования навигационного блока входят одометрический датчик пути и скорости, чувствительным элементом которого является подпружиненное мерное колесо, контактирующее с внутренней поверхностью трубопровода, и гироскопические датчики направления.
Блок первичной обработки и регистрации информации содержит оборудование, обеспечивающее синхронное накопление в бортовом хранителе диагностической и навигационной информации, что дает возможность в дальнейшем осуществить съем, идентификацию и взаимное соотнесение этой информации.
Блок управления скоростью перемещения содержит оборудование, предназначенное для поддержания заданной скорости перемещения диагностического модуля внутри трубопровода за счет воздействия на исполнительные механизмы своей тормозной системы. В состав этого оборудования входит устройство сравнения заданной и текущей скорости, связанное с задатчиком скорости и одометрическим датчиком пути и скорости, а также формирователи управляющих сигналов, связанные с исполнительными механизмами тормозной системы диагностического модуля.
Исполнительными механизмами тормозной системы диагностического модуля являются электромагниты электромагнитных тормозов и электропривод поворотной заслонки, перекрывающей байпасный патрубок.
Помимо рассмотренного оборудования диагностический модуль содержит также генератор сигналов обнаружения (маяк), выполненный в виде низкочастотного генератора, выходы которого через согласующий трансформатор и щеточные токопроводы взаимодействуют с двумя разнесенными по длине трубопровода участками его внутренней поверхности. При работе генератора между этими участками формируется электромагнитное поле, способное быть зафиксированным внешними приборами, осуществляющими контроль за местонахождением диагностического модуля в процессе проведения им диагностических исследований трубопровода.
Функционирует система-прототип следующим образом. Диагностический модуль вводится в обследуемый трубопровод через пусковую камеру со шлюзовым проходом. Перемещаясь далее самостоятельно по трубопроводу с определенной скоростью, заданной исходя из обеспечения необходимой точности и качества измерений, диагностический модуль инспектирует техническое состояние трубопровода и фиксирует внутри себя данные об этом состоянии. После обследования заданного участка трубопровода диагностический модуль направляется в приемную камеру со шлюзовым проходом, откуда извлекается. Затем диагностический модуль подключается к внешнему блоку приема и обработки диагностической информации. С помощью этого блока осуществляется съем и окончательная обработка полученной диагностической информации, позволяющая получить картину технического состояния трубопровода на исследованном участке, в частности определить наличие и местоположение дефектных участков с кавернами, трещинами, свищами и т.п.
Положительным свойством системы-прототипа является возможность задания для диагностического модуля нужной скорости перемещения, меньшей, чем скорость транспортируемого продукта, что создает предпосылки для осуществления диагностических исследований с высокой точностью и качеством. Положительным свойством является также обеспечение возможности внешнего контроля за местонахождением диагностического модуля в процессе проведения им диагностических исследований трубопровода.
Однако эти положительные свойства реализуются за счет оснащения диагностического модуля соответствующим бортовым оборудованием, которое требует определенного места для своего размещения и определенных энергетических затрат для своего функционирования.
Недостатком системы-прототипа является также отсутствие возможности оперативного съема информации в процессе перемещения диагностического модуля внутри трубопровода, что приводит к необходимости размещения на борту диагностического модуля соответствующего оборудования для систематизации и хранения больших объемов информации.
В условиях дефицита места на борту и ограниченных энергетических возможностей бортовой энергосистемы отмеченные факторы не позволяют наращивать диагностическое оборудование и/или увеличивать объем информации, получаемой с диагностического модуля.
В рамках применения стандартных средств, традиционно используемых в данной области техники, задача наращивания бортового диагностического оборудования диагностического модуля моноблочной конструкции и/или увеличения объема получаемой с него диагностической информации не имеет приемлемого решения. По этой причине в ряде систем переходят к многомодульным построениям, где отдельные модули, соединенные карданными сцепками, несут свою отдельную часть оборудования, как это описывается, например, в [7] и [9]. Однако такое многомодульное построение отличается от одномодульного решения громоздкостью, металлоемкостью, сложностью в изготовлении и эксплуатации, теряет в компактности и универсальности, проигрывает в стоимости.
Задачей, на решение которой направлено заявляемое изобретение, является создание системы внутритрубного обследования трубопроводов, транспортирующих жидкие продукты (например, нефть или нефтепродукты), использующей в качестве диагностического устройства диагностический модуль моноблочной конструкцию, способный перемещаться внутри трубопровода под воздействием транспортируемого продукта со скоростью, меньшей, чем скорость этого продукта, при этом не содержащий на своем борту средств управления скоростью перемещения и обладающий возможностью передачи данных диагностических исследований на внешний блок приема и обработки диагностической информации в режиме реального времени.
Сущность изобретения заключается в следующем. Система внутритрубного обследования трубопроводов содержит диагностический модуль, размещаемый внутри обследуемого трубопровода, транспортирующего жидкий продукт, и внешний блок приема и обработки диагностической информации. Диагностический модуль оснащен опорными элементами, обеспечивающими его центрирование внутри трубопровода в процессе перемещения под воздействием транспортируемого продукта со скоростью, меньшей, чем скорость транспортировки продукта. Бортовое оборудование диагностического модуля содержит навигационный блок, диагностический блок и блок первичной обработки информации, вход которого связан с выходом диагностического блока, а также источники бортового электропитания - аккумуляторную батарею и генератор с турбинным приводом. В отличие от прототипа диагностический модуль выполнен в виде плавучей капсулы, оснащен носовыми стабилизирующими рулями и связан с внешним блоком приема и обработки диагностической информации волоконно-оптическим кабелем, подключенным к первому информационному входу этого блока. В состав бортового оборудования диагностического модуля введен блок управления носовыми стабилизирующими рулями, вход которого связан с выходом навигационного блока, а выходы - с исполнительными механизмами носовых стабилизирующих рулей, а также блок передачи информации, вход которого связан с выходом блока первичной обработки информации, а выход подключен к волоконно-оптическому кабелю. Волоконно-оптический кабель со стороны диагностического модуля взаимодействует с размещенным в кормовой части диагностического модуля устройством крепления, обеспечивающим механическую связь диагностического модуля с волоконно-оптическим кабелем. Со стороны блока приема и обработки диагностической информации волоконно-оптический кабель взаимодействует с устройством подачи, осуществляющим подачу волоконно-оптического кабеля с натяжением, обеспечивающим притормаживание диагностического модуля в процессе его перемещения по трубопроводу. Управляющий вход устройства подачи связан через блок управления с выходом датчика длины кабеля и скорости его подачи. С выходом этого датчика также связан второй информационный вход блока приема и обработки диагностической информации.
В вариантах реализации, имеющих практическое значение, в качестве волоконно-оптического кабеля используется волоконно-оптический кабель, содержащий упрочняющие кевларовые нити и защитный чехол.
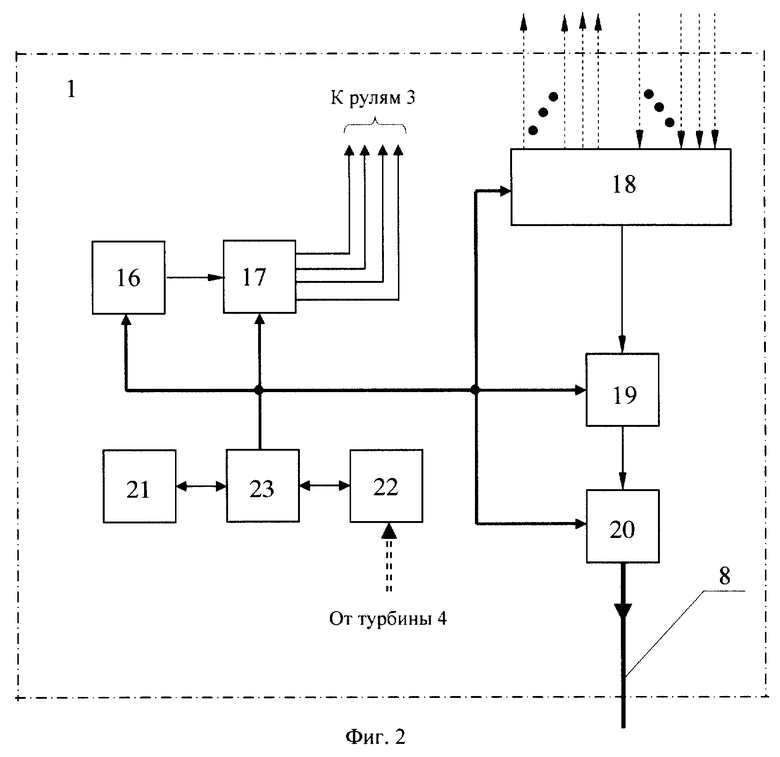
Сущность изобретения и возможность его осуществления поясняются чертежами, представленными на фиг.1 и 2, где на фиг.1 приведен пример конструктивной схемы заявляемой системы, а на фиг.2 - пример функциональной схемы бортового оборудования диагностического модуля.
Заявляемая система внутритрубного обследования трубопроводов в рассматриваемом примере (фиг.1, 2) содержит диагностического модуль 1, выполненный в виде капсулы с положительной плавучестью (плавучей капсулы). Диагностический модуль 1 оснащен опорными элементами 2, носовыми стабилизирующими рулями 3 (горизонтальными и вертикальными) и турбиной 4. В рабочем положении диагностический модуль 1 находится внутри обследуемого трубопровода 5, перемещаясь внутри потока транспортируемого жидкого продукта 6 под его воздействием со скоростью, меньшей скорости потока.
Опорные элементы 2 служат для центрирования диагностического модуля 1 внутри трубопровода 5. Опорные элементы 2 могут быть выполнены, например, в виде подпружиненных колес, контактирующих с внутренней поверхностью трубопровода 5.
Носовые стабилизирующие рули 3 служат для определенной ориентации диагностического модуля 1 внутри трубопровода 5, в том числе для предотвращения его вращения вокруг продольной оси. Поворот носовых стабилизирующих рулей 3 осуществляется соответствующими исполнительными механизмами - рулевыми машинками (на фиг.1 и 2 не показаны).
Турбина 4 служит для отбора части энергии у потока, обтекающего диагностический модуль 1, в целях последующего преобразования ее в электрическую энергию, используемую для питания бортового оборудования диагностического модуля 1 в процессе его перемещения внутри трубопровода 5.
Диагностический модуль 1 связан с внешним блоком 7 приема и обработки диагностической информации волоконно-оптическим кабелем 8, подключенным к его первому информационному входу. Блок 7 приема и обработки диагностической информации расположен в сухом отсеке 9 пусковой камеры, связанном с трубопроводом 5 шлюзовым отсеком 10, при этом волоконно-оптический кабель 8 проходит из отсека 10 в отсек 9, например, через манжетное уплотнение (сальник) 11.
В качестве волоконно-оптического кабеля 8 используется волоконно-оптический кабель, содержащий упрочняющие нити, например кевларовые, и защитный чехол. Сечение волоконно-оптического кабеля 8 составляет 4-8 мм2, реализуемая дальность передачи данных без дополнительного усилителя - до 10000 м.
Волоконно-оптический кабель 8 со стороны диагностического модуля 1 взаимодействует с размещенным в его кормовой части устройством крепления 12, обеспечивающим механическую связь несущего модуля 1 с волоконно-оптическим кабелем 8.
Со стороны блока 7 приема и обработки диагностической информации волоконно-оптический кабель 8 взаимодействует с устройством подачи 13, расположенным в отсеке 9 пусковой камеры и осуществляющим подачу волоконно-оптического кабеля 8 с натяжением, обеспечивающим притормаживание диагностического модуля 1 в процессе его перемещения по трубопроводу 5. Управляющий вход устройства подачи 13 связан через блок 14 управления с выходом датчика 15 - датчика длины кабеля и скорости его подачи. С выходом датчика 15 также связан второй информационный вход блока 7 приема и обработки диагностической информации.
В простейшем случае датчик 15 представляет собой электромеханическое устройство типа одометра-спидометра с чувствительным элементом в виде мерного колеса, взаимодействующего с подаваемым волоконно-оптическим кабелем 8, с электрическим выходом, образованным выходами спидометра и одометра.
В простейшем случае устройство подачи 13 представляет собой катушку с намотанным на нее волоконно-оптическим кабелем 8, приводимую в движение электроприводом, например шаговым двигателем, по сигналам, поступающим с блока 14 управления.
Блок 14 управления является «интеллектуальным» звеном в схеме автоматического управления приводом устройства подачи 13. В его функции входят: отслеживание текущей скорости подачи волоконно-оптического кабеля 8 и его длины, сравнение этих текущих данных с данными, заложенными в программе его работы, а также формирование на основе этого сравнения сигналов для управления приводом устройства подачи 13. Блок 14 управления снабжен органами управления, позволяющими оператору вводить исходные данные для управления устройством подачи 13 для получения нужной скорости перемещения диагностического модуля 1 в трубопроводе 5.
Бортовое оборудование диагностического модуля 1 содержит (фиг.2) навигационный блок 16, блок 17 управления носовыми стабилизирующими рулями, диагностический блок 18, блок 19 первичной обработки информации и блок 20 передачи информации. Вход блока 17 управления носовыми стабилизирующими рулями связан с выходом навигационного блока 16, а выходы - с исполнительными механизмами носовых стабилизирующих рулей 3. Вход блока 19 первичной обработки информации связан с выходом диагностического блока 18, а выход - с входом блока 20 передачи информации. Выход блока 20 передачи информации подключен к волоконно-оптическому кабелю 8.
Бортовое оборудование диагностического блока 1 содержит также источники бортового электропитания - аккумуляторную батарею 21 и генератор 22 с приводом от турбины 4. Совместная работа аккумуляторной батареи 21 и генератора 22 осуществляется с помощью контроллера 23. В его функции входят: заряд аккумуляторной батареи 21 от генератора 22 и формирование бортового напряжения питания - либо из выходного напряжения генератора 22, либо из напряжения аккумуляторной батареи 21 (в случае, когда генератор 22 не работает или его выходное напряжение не соответствует норме).
Навигационный блок 16 содержит оборудование, предназначенное для определения текущего положения осей несущего модуля 1 и формирования сигналов отклонения их от заданного положения, например оборудование на основе гироскопических датчиков направления.
Блок 17 управления стабилизирующими рулями содержит оборудование, предназначенное для формирования из выходных сигналов навигационного блока 16 управляющих сигналов, под действием которых с помощью соответствующих исполнительных механизмов (рулевых машинок) осуществляется поворот носовых стабилизирующих рулей 3 и ориентация диагностического модуля 1 в определенном положении. Ориентация диагностического модуля 1 в определенном положении дает возможность осуществлять диагностические исследования с высокой точностью. Кроме этого, такая ориентация исключает вращение диагностического модуля 1 вокруг продольной оси, что исключает возможность перекручивания и обрыва волоконно-оптического кабеля 8.
Диагностический блок 18 содержит оборудование, предназначенное для диагностических (дефектоскопических) исследований и формирования сигналов, несущих информацию о состоянии трубопровода, например аппаратуру ультразвуковой дефектоскопии. В случае применения ультразвуковой дефектоскопии может использоваться, например, высокочастотный (5-10 МГц) эхо-метод с иммерсионным способом введения звуковых импульсов от датчиков-излучателей. Точность измерений при таком методе составляет 0,2-0,4 мм при толщинах стенки 3-10 мм. Примерами промышленно изготавливаемой аппаратуры ультразвуковой дефектоскопии, обеспечивающей такие характеристики, являются ультразвуковые толщиномеры фирмы Брэнсон (США) типа «Калипер-104М», отечественные ультразвуковые толщиномеры типа «УТ-93П» и им аналогичные. Наибольший диагностический эффект обеспечивается в том случае, когда ультразвуковые датчики-излучатели располагаются по окружности в плоскости, совпадающей с плоскостью поперечного сечения трубопровода, что позволяет получать панораму кольца измерений. При осуществлении панорамных исследований оборудование диагностического блока 18 управляет последовательностью включения датчиков-излучателей и осуществляет маркировку их выходных информационных сигналов в соответствии с номером датчика-излучателя, что обеспечивает возможность их идентификации при последующей обработке в блоке 7.
Блок 19 первичной обработки информации содержит оборудование, предназначенное для предварительной фильтрации сигналов, несущих диагностическую информацию, и преобразования их к цифровому кодированному виду в соответствии с согласованным с блоком 7 протоколом передачи информации.
Блок 20 передачи информации содержит оборудование на основе электронно-оптических преобразователей, предназначенное для преобразования электрических сигналов, поступающих с блока 19 первичной обработки информации, в световые сигналы, передаваемые далее по волоконно-оптическому кабелю 8.
Блок 7 приема и обработки диагностической информации содержит оборудование на основе оптоэлектронных преобразователей, предназначенное для преобразования оптических сигналов в электрические. Это оборудование состыковано в блоке 7 с оборудованием на основе специализированного компьютера, обеспечивающим декодирование сигналов, их обработку и формирование текущей диагностической картины. При этом, в частности, информация о длине поданного волоконно-оптического кабеля 8, поступающая с датчика 15 и характеризующая удаление диагностического модуля 1 от блока 7, позволяет соотносить текущую диагностическую информацию с конкретным участком трубопровода 5. Обработанная диагностическая информация, характеризующая техническое состояние на исследуемом участке трубопровода 5, фиксируется в блоке 7 на определенном носителе и визуально отображается на экране его монитора в режиме реального времени.
Функционирование заявляемой системы осуществляется следующим образом.
В отсеке 9 пусковой камеры располагаются блок 7 приема и обработки диагностической информации, устройство подачи 13 с намотанным волоконно-оптическим кабелем 8, блок 14 управления и датчик 15.
Один конец волоконно-оптического кабеля 8 подключается к первому информационному входу блока 7. Другой конец волоконно-оптического кабеля 8 пропускается через манжетное уплотнение 11 и соединяется с помощью устройства крепления 12 с диагностическим модулем 1, располагающимся на исходной позиции в шлюзовом отсеке 10.
Бортовое оборудование диагностического модуля 1 приводится в рабочее состояние, в частности устанавливаются в номинальное положение гироскопические датчики навигационного блока 16. На этом этапе работа бортового оборудования диагностического модуля 1 осуществляется от аккумуляторной батареи 21.
Затем диагностический модуль 1 вводится в обследуемый трубопровод 5 через шлюзовой отсек 10.
Увлекаемый потоком транспортируемого продукта 6 диагностический модуль 1 перемещается внутри этого потока с определенной скоростью, меньшей, чем скорость потока, что обеспечивается определенным натяжением волоконно-оптического кабеля 8, создаваемым устройством подачи 13, управляемым блоком 14 управления. На этом этапе работа бортового оборудования диагностического модуля 1 осуществляется от генератора 22, вращаемого турбиной 4.
В процессе перемещения диагностического модуля 1 в трубопроводе 5 поддерживается его определенная ориентация, что обеспечивается совместным действием опорных элементов 2 (пассивная стабилизация) и носовых стабилизирующих рулей 3, управляемых блоками 16 и 17 (активная стабилизация).
В процессе перемещения диагностического модуля 1 с помощью блока 18 осуществляются диагностические исследования, например ультразвуковые измерения толщины стенки трубопровода 5 и выявление дефектов - каверн, трещин, свищей и т.п.
Получаемая на борту диагностического модуля 1 диагностическая информация с помощью блоков 19 и 20 кодируется, преобразуется и передается в режиме реального времени через волоконно-оптический кабель 8 на первый информационный вход блока 7. На второй информационный вход блока 7 поступает информация от датчика 15 о длине поданного кабеля 8. Блок 7 обрабатывает эту информацию и формирует текущую диагностическую картину исследуемого участка трубопровода 5 в режиме реального времени.
После прохождения исследуемого участка трубопровода 5 диагностический модуль 1 направляется в приемную камеру со шлюзовым проходом (на фиг.1 и 2 не показано), откуда извлекается. При этом также извлекается волоконно-оптический кабель 8.
При исследовании следующих участков трассы трубопровода 5 все рассмотренные операции повторяются.
Таким образом, в заявляемой системе в отличие от системы-прототипа осуществляется передача диагностической информации в режиме реального времени, причем волоконно-оптический кабель, по которому осуществляется передача текущей диагностической информации, одновременно является тем средством, с помощью которого осуществляется притормаживание диагностического модуля в процессе его перемещения внутри трубопровода.
Такое техническое решение освобождает диагностический модуль от необходимости хранения на борту больших объемов информации, от необходимости формирования на борту сигналов для управления скоростью перемещения, от необходимости формирования сигналов, сигнализирующих о местонахождении диагностического модуля внутри трубопровода. В результате появляется дополнительное место на борту и резерв электрической мощности, что дает возможность, например, для наращивания бортового диагностического оборудования и/или увеличения объема получаемой с него диагностической информации. При этом организация канала передачи информации с применением волоконно-оптического кабеля позволяет передавать сверхбольшие объемы информации без помех и искажений.
Другим полезным свойством заявляемой системы, отличающей ее от рассмотренных аналогов и прототипа, является возможность проведения диагностических исследований на неочищенных участках трубопроводов, имеющих внутренние наросты и сужения. Обусловлено это иным принципом перемещения диагностического модуля - не по принципу толкаемого поршня, а по принципу плавучей капсулы, перемещающейся внутри потока и подтормаживаемой с кормы за счет натяжения кабеля.
Таким образом, из рассмотренного следует, что заявляемое изобретение осуществимо и решает поставленную задачу по созданию системы внутритрубного обследования трубопроводов, транспортирующих жидкие продукты (например, нефть или нефтепродукты), использующей в качестве диагностического устройства диагностический модуль моноблочной конструкции, способный перемещаться внутри трубопровода под воздействием транспортируемого продукта со скоростью, меньшей, чем скорость этого продукта, при этом не содержащий на борту средств управления скоростью перемещения и обладающий возможностью передачи большого объема данных диагностических исследований на внешний блок приема и обработки диагностической информации в режиме реального времени.
Источники информации
1. RU №2066418 (C1), F 17 D 5/02, F 16 L 55/26, опубл. 10.09.1996.
2. RU №2084757 (C1), F 17 D 5/00, опубл. 20.07.1997.
3. RU №2106569 (C1), F 17 D 5/00, опубл. 10.03.1998.
4. RU №2139469 (C1), F 17 D 5/00, G 01 N 29/00, G 01 N 27/87, опубл. 10.10.1999.
5. RU №2137024 (C1), F 17 D 5/00, опубл. 10.09.1999.
6. RU №2111453 (C1), G 01 B 17/00, F 17 D 5/00, F 16 L 57/00, опубл. 20.05.1998.
7. RU №2172954 (С2), G 01 N 29/04, F 17 D 5/00, опубл. 27.08.2001.
8. RU №2194918 (C1), F 17 D 5/00, F 16 L 55/26, опубл. 20.12.2002.
9. RU №2109206 (C1), F 17 D 5/00, В 08 В 9/04, опубл. 20.04.1998.
10. RU №2069288 (C1), F 17 D 5/02, опубл. 20.11.1996.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВНУТРИТРУБНЫЙ МНОГОКАНАЛЬНЫЙ ПРОФИЛЕМЕР | 2012 |
|
RU2529820C2 |
| СИСТЕМА ОПЕРАТИВНОЙ ДИАГНОСТИКИ БИОЛОГИЧЕСКОГО ЗАГРЯЗНЕНИЯ ВОЗДУХА В ВЕНТИЛЯЦИОННЫХ КАНАЛАХ ЗДАНИЙ И СООРУЖЕНИЙ | 2002 |
|
RU2222803C2 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| Оптико-электронная система преобразования данных изображения в элементы вектора состояния судна | 2023 |
|
RU2808873C1 |
| АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, С ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ СИСТЕМОЙ НАВЕДЕНИЯ | 2006 |
|
RU2339905C2 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ И КООРДИНАТ ДЕФЕКТОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2004 |
|
RU2261424C1 |
Изобретение относится к области диагностики текущего состояния трубопроводов и может быть использовано в системах, осуществляющих мониторинг состояния магистральных трубопроводов, транспортирующих жидкие продукты, например нефть, в процессе их эксплуатации. Достигаемый технический результат заключается в возможности передачи диагностической информации в режиме реального времени по волоконно-оптическому кабелю, используемому одновременно как средство торможения диагностического модуля в процессе его перемещения внутри трубопровода. В системе внутритрубного обследования трубопроводов, содержащей диагностический модуль с бортовым оборудованием, содержащим навигационный блок, диагностический блок и блок первичной обработки информации, размещаемый внутри обследуемого трубопровода, транспортирующего жидкий продукт, и внешний блок приема и обработки диагностической информации, диагностический модуль выполнен в виде плавучей капсулы, оснащен носовыми стабилизирующими рулями и связан с указанным блоком приема и обработки диагностической информации волоконно-оптическим кабелем, подключенным к первому информационному входу этого блока, при этом в состав бортового оборудования диагностического модуля введен блок управления носовыми стабилизирующими рулями, вход которого связан с выходом навигационного блока, а выходы - с исполнительными механизмами носовых стабилизирующих рулей, а также блок передачи информации, вход которого связан с выходом блока первичной обработки информации, а выход подключен к волоконно-оптическому кабелю, волоконно-оптический кабель со стороны диагностического модуля взаимодействует с размещенным в кормовой части диагностического модуля устройством крепления, обеспечивающим механическую связь диагностического модуля с волоконно-оптическим кабелем, а со стороны блока приема и обработки диагностической информации волоконно-оптический кабель взаимодействует с устройством подачи, осуществляющим подачу волоконно-оптического кабеля с натяжением, обеспечивающим притормаживание диагностического модуля в процессе его перемещения по трубопроводу, при этом управляющий вход устройства подачи связан через блок управления с выходом датчика длины кабеля и скорости его подачи, связанным также с вторым информационным входом блока приема и обработки диагностической информации. 1 з.п. ф-лы, 2 ил.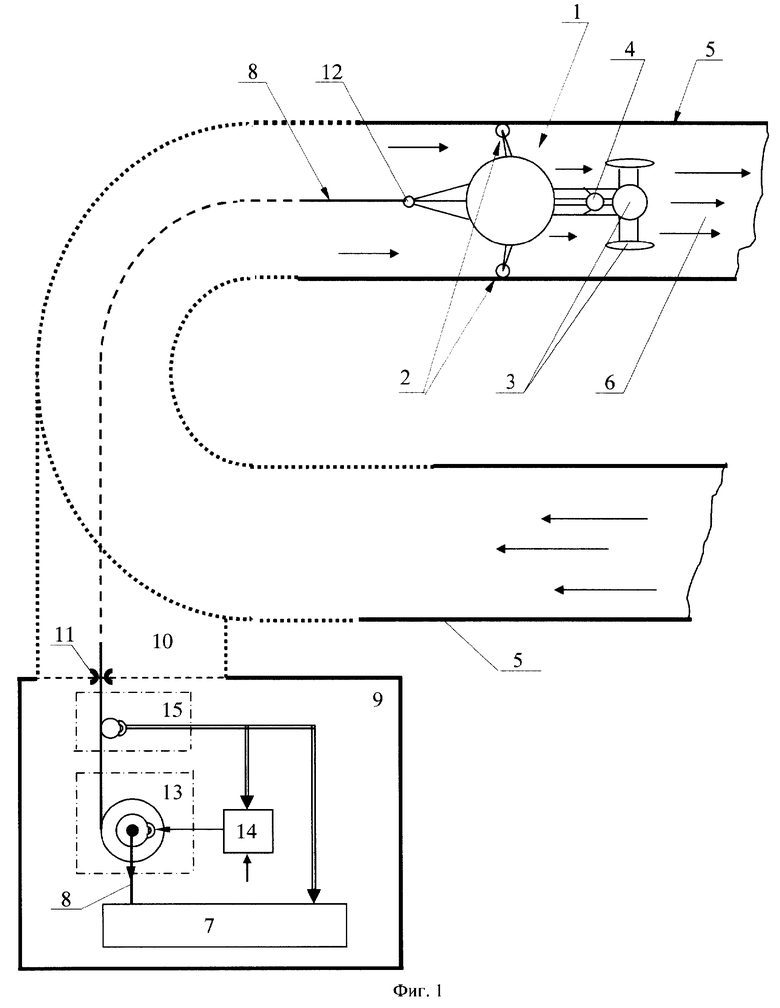
| ДЕФЕКТОСКОП-СНАРЯД ДЛЯ ВНУТРИТРУБНОГО ОБСЛЕДОВАНИЯ ТРУБОПРОВОДОВ | 1993 |
|
RU2069288C1 |

