Изобретение относится к контрольно-измерительной технике и может использоваться для определения координат трассы (оси) и координат дефектов подземного трубопровода.
Известно устройство для определения местоположения дефектов в трубопроводе [1], включающее герметичный контейнер, подключенный к автономному прибору, пропускаемому совместно с ним, и содержит последовательно соединенные генератор частоты, формирователь временных интервалов, счетчик, регистры и модуль вывода информации, а также формирователь сигнала записи и регистры состояния выходов счетчика по сигналу регистрации дефекта. Выход генератора частоты подключен к входу формирователя временных интервалов, выход которого подключен к входу счетчика. Выходы счетчика подключены к входам регистров, а выходы регистров к входам модуля вывода информации. Вход формирователя сигналов записи подключен к обрабатывающему устройству автономного прибора средства диагностики, а выход - к регистрам. Автономный прибор средства технической диагностики вместе с устройством запускается из камеры пуска и продвигается вместе с потоком перекачиваемого продукта по трубопроводу. При регистрации дефекта в автономном приборе регистрируется время, прошедшее с начала выхода прибора из камеры пуска (или с момента включения автономного прибора) до момента обнаружения дефекта. После извлечения автономного прибора из камеры приема производится считывание результатов обследования. По полученным отметкам времени вычисляется расстояние от камеры пуска до дефектов, как произведение скорости потока на значение соответствующих этим дефектам отметок времени (скорость определяется по объему перекачанного за это время продукта).
Недостатком устройства является низкая точность определения местоположения дефекта при минимальной длине диагностируемого участка, а также отсутствие возможности определения координат трассы трубопровода и координат дефектов.
Известно устройство для определения и регистрации геометрических параметров трубопроводов [2], обеспечивающее возможность автоматического вычисления географических координат, направления и величины радиуса кривизны локальных участков и профиля поперечного сечения трубы путем пропуска внутри обследуемого трубопровода снаряда, содержащего герметичный контейнер, эластичные манжеты, жестко закрепленные в хвостовой и носовой частях герметичного контейнера, последовательно соединенные датчик пути, установленный на внешней поверхности контейнера, блок вычислений и управления и регистратор, размещенные внутри герметичного контейнера, ультразвуковой измеритель радиальных расстояний, состоящий из n ультразвуковых приемопередающих преобразователей, расположенных попарно и диаметрально противоположно на внешней поверхности герметичного контейнера, и расположенного внутри контейнера измерительного модуля, первая группа выходов которого подключена к шине ввода, а первая группа входов - к управляющей шине блока вычислений, вторая группа выходов к передатчикам, а вторая группа входов - к приемникам ультразвукового приемопередающего преобразователя, также устройство снабжено трехкомпонентным гироскопическим измерителем угловой скорости и трехкомпонентным гироскопическим измерителем кажущегося ускорения, подключенными к информационным входам блока вычисления, вторым и третьим ультразвуковыми измерителями радиальных расстояний, аналогичными первому, первые группы их выходов подключены к шине ввода, а первая группа входов - к управляющей шине блока вычислений, при этом ультразвуковые приемопередающие преобразователи одного измерителя радиальных расстояний расположены по окружности в носовой части контейнера, другого измерителя в средней части контейнера, а третьего в хвостовой части контейнера, а центр тяжести контейнера смещен к боковой стенке. Координаты поперечного сечения трубы вычисляются в блоке вычисления и управления по данным о компонентах угловой скорости и кажущегося ускорения, определенных трехкомпонентным гироскопическим измерителем угловой скорости и трехкомпонентным измерителем кажущегося ускорения соответственно.
Недостатком устройства является низкая точность определения координат трубопровода при минимальной длине диагностируемого участка из-за накапливающейся со временем ошибки, свойственной гироскопическим измерителям, отсутствует возможность определения координат дефектов, при этом весь объем навигационных вычислений происходит на борту снаряда, что приводит к усложнению бортового оборудования, увеличению объема данных для хранения, повышению его энергопотребления и как следствие этого - к уменьшению длины диагностируемого участка трубопровода из-за ограничения емкости аккумуляторов и запоминающих устройств.
Известна система определения координат трассы подземного трубопровода [3], выбранная в качестве прототипа, содержащая маркеры (далее в материалах заявки - маркеры трассы), внутритрубный инспектирующий снаряд, включающий герметичный контейнер, эластичные манжеты, жестко закрепленные в носовой и хвостовой частях контейнера, последовательно соединенные датчик пути, установленный на внешней поверхности контейнера, блок вычислений и управления и регистратор, трехкомпонентный гироскопический измеритель угловой скорости (далее в материалах заявки - трехкомпонентный измеритель угловой скорости) и трехкомпонентный акселерометр, размещенные внутри контейнера, три ряда расположенных по окружностям ультразвуковых приемопередающих преобразователей, расположенных попарно и диаметрально противоположно на внешней поверхности по n в каждом ряду в носовой, хвостовой и средней частях контейнера, подключенные к информационным входам блока вычислений и управления, акселерометр широкого диапазона измерения по продольной оси контейнера (далее в материалах заявки - продольный акселерометр), три усилителя, соединенные своими входами с выходами трехкомпонентного измерителя угловой скорости, датчики сигналов маркеров с аналого-цифровым преобразователем, контроллером и датчик температуры, которые расположены внутри контейнера и соединены через первую системную шину с регистратором, регистратор выполнен в виде переносного долговременного запоминающего устройства, а блок вычислений и управления - в виде бортового процессора с аналого-цифровым преобразователем и наземной подсистемы, состоящей из блока ввода данных маркерных точек, блока переключения диапазонов гироскопических измерителей угловой скорости и переключения продольных акселерометров (далее в материалах заявки - блок переключения диапазонов), блока вычисления сигналов коррекции по углам тангажа и крена (далее в материалах заявки - блок вычисления сигналов коррекции), блока вычисления оценок параметров ориентации (далее в материалах заявки - блок вычисления оценок), блока идентификации смещения нулей гироскопических измерителей угловой скорости и акселерометров (далее в материалах заявки - блок идентификации смещения), а также устройства согласования, сумматора, вычислителя декартовых координат (далее в материалах заявки - вычислитель координат снаряда), фильтра нижних частот, детектора уровня вибрации и устройства сравнения, причем выходы переносного долговременного запоминающего устройства по каналам измерения угловых скоростей и линейных ускорений соединены через вторую системную шину с блоком переключения диапазонов, первая группа выходов которого соединена с первой группой входов блока идентификации смещения и через сумматор с первыми группами входов блока вычисления оценок, вторая группа входов которого соединена со второй группой выходов блока переключения диапазонов, а два выхода соединены с соответствующими входами блока вычисления оценок, третий вход которого соединен через вторую системную шину и устройство согласования с одним из выходов блока ввода данных маркерных точек, остальные выходы которого через устройство согласования и вторую системную шину связаны со второй группой входов блока идентификации смещения, третья группа выходов переносного долговременного запоминающего устройства, через вторую системную шину соединена с соответствующими входами блоков вычисления сигналов коррекции, идентификации смещения, а также вычислителя координат снаряда, блока вычисления оценок, выходы которого соединены с четвертой группой входов блока идентификации смещения и второй группой входов вычислителя координат снаряда, выходы которого соединены с пятой группой входов блока идентификации смещения, группа выходов которого соединена с второй группой входов сумматора, а два одиночных выхода соединены с соответствующими входами блоков вычисления оценок и вычисления сигналов коррекции, выход переносного долговременного запоминающего устройства по каналу измерения температуры через вторую системную шину соединен с соответствующим входом блока идентификации смещения, кроме того, ультразвуковые приемопередающие преобразователи соединены через вторую системную шину, фильтр нижних частот и детектор уровня вибрации с выходами устройства сравнения.
Недостатком системы является низкая точность определения координат трассы трубопровода и отсутствие возможности определения координат дефектов.
В основу изобретения положена задача повышения точности определения координат трассы (оси) подземных трубопроводов и определения координат дефектов подземных трубопроводов.
Поставленная задача решается тем, что в систему для определения координат трассы и координат дефектов подземного трубопровода, содержащую маркеры трассы, внутритрубный инспектирующий снаряд, включающий герметичный контейнер, эластичные манжеты, жестко закрепленные в носовой и хвостовой частях контейнера, последовательно соединенные датчик пути, установленный на внешней поверхности контейнера, блок вычислений и управления и регистратор, трехкомпонентный измеритель угловой скорости и трехкомпонентный акселерометр, размещенные внутри контейнера, подключенные к информационным входам блока вычислений и управления, продольный акселерометр, три усилителя, соединенные своими входами с выходами трехкомпонентного измерителя угловой скорости, датчик температуры, которые расположены внутри контейнера и соединены через первую системную шину с регистратором, блок вычислений и управления выполнен в виде бортового процессора с аналого-цифровым преобразователем, наземную подсистему, состоящую из блока переключения диапазонов, блока вычисления сигналов коррекции, блока вычисления оценок, блока идентификации смещения, а также сумматора, вычислителя координат снаряда, причем первый и второй выходы регистратора соединены через вторую системную шину соответственно с первым и вторым входами блока переключения диапазонов, первая группа выходов которого соединена с первой группой входов блока идентификации смещения и через сумматор с первыми группами входов блока вычисления оценок и блока вычисления сигналов коррекции, вторая группа входов которого соединена со второй группой выходов блока переключения диапазонов, а первый и второй выходы соединены соответственно со вторым и третьим входами блока вычисления оценок, третий выход регистратора через вторую системную шину соединен с третьим входом блока вычисления сигналов коррекции, первым входом вычислителя координат снаряда, четвертым входом блока вычисления оценок, выход которого соединен со вторым входом вычислителя координат снаряда, группа выходов блока идентификации смещения соединена со второй группой входов сумматора, четвертый выход регистратора через вторую системную шину соединен со вторым входом блока идентификации смещения, вводится n навигационных спутников, маркер камеры пуска, состоящий из последовательно соединенных приемной антенны, навигационного приемника, блока обработки и сопряжения, накопителя данных, маркер камеры приема, состоящий из маркерного приемника, последовательно соединенных приемной антенны, навигационного приемника, блока обработки и сопряжения, накопителя данных, причем выход маркерного приемника соединен со вторым входом блока обработки и сопряжения, в каждый из маркеров трассы вводится маркерный приемник, последовательно соединенные приемная антенна, навигационный приемник, блок обработки и сопряжения, накопитель данных, причем выход маркерного приемника соединен со вторым входом блока обработки и сопряжения, во внутритрубный инспектирующий снаряд вводится модуль дефектоскопии, синхронизируемый опорный генератор и маркерный передатчик, модуль дефектоскопии соединен через первую системную шину с бортовым процессором и регистратором, маркерный передатчик соединен через первую системную шину с бортовым процессором, выход синхронизируемого опорного генератора соединен с входом управления бортового процессора, причем на этапе пуска внутритрубного инспектирующего снаряда вход управления синхронизируемого опорного генератора соединяется со вторым выходом навигационного приемника маркера камеры пуска, в наземную подсистему вводится блок ввода эталонных координат, блок вывода информации, последовательно соединенные вычислитель параметра, вычислитель поправок, вычислитель координат маркеров, вычислитель поправок маркеров, вычислитель координат трубопровода, вычислитель координат дефектов, блок памяти, блок обработки и отображения, причем через вторую системную шину первый выход блока ввода эталонных координат соединен с входом вычислителя параметра и вторым входом вычислителя поправок маркеров, а второй выход через вторую системную шину соединен с пятым входом блока вычисления оценок, выход накопителя данных маркера камеры пуска и первый выход накопителя данных маркера камеры приема соединены со второй группой входов вычислителя поправок, первая группа выходов накопителей данных маркеров трассы соединена со второй группой входов вычислителя координат маркеров, второй выход накопителя данных маркера камеры приема и вторая группа выходов накопителей данных маркеров трассы соединены с третьей группой входов вычислителя поправок маркеров, третьей группой входов вычислителя координат снаряда, шестой группой входов блока вычисления оценок, четвертой группой входов блока вычисления сигналов коррекции, четвертый вход вычислителя поправок маркеров соединен с первым выходом вычислителя координат снаряда, второй выход которого соединен со вторым входом вычислителя координат трубопровода, второй выход которого соединен со вторым входом блока памяти, пятый выход регистратора через вторую системную шину соединен с входом блока вывода информации, выход которого соединен со вторым входом вычислителя координат дефектов.
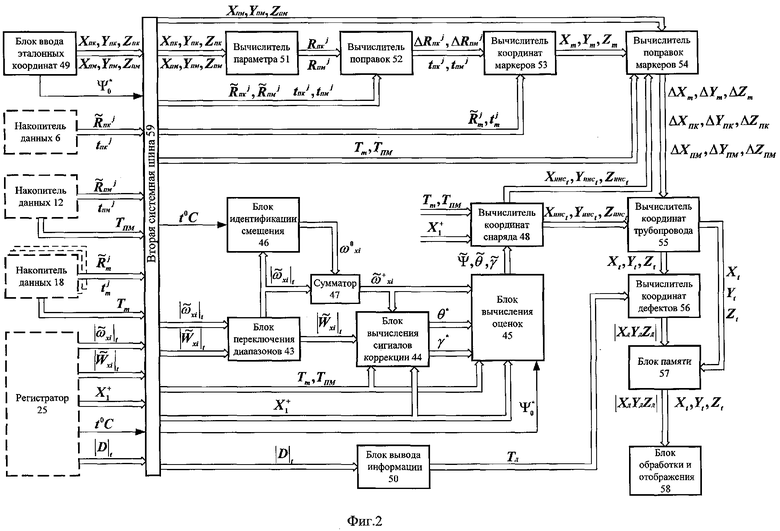
Изобретение поясняется прилагаемыми чертежами, на которых: на фиг.1 изображена структурная схема системы для определения координат трассы и координат дефектов подземного трубопровода; на фиг.2 - структурная схема наземной подсистемы системы для определения координат трассы и координат дефектов подземного трубопровода; на фиг.3 - структурная схема бортового процессора внутритрубного инспектирующего снаряда; на фиг.4 - алгоритм работы микропроцессорного модуля бортового процессора.
Система для определения координат трассы и координат дефектов подземного трубопровода содержит n навигационных спутников 11...1n, маркер камеры пуска 2, состоящий из последовательно соединенных приемной антенны 3, навигационного приемника 4, блока обработки и сопряжения 5, накопителя данных 6, маркер камеры приема 7, содержащий маркерный приемник 8, последовательно соединенные приемную антенну 9, навигационный приемник 10, блок обработки и сопряжения 11, накопитель данных 12, причем выход маркерного приемника 8 соединен со вторым входом блока обработки и сопряжения 11, маркеры трассы 131...13k, каждый из которых содержит маркерный приемник 14, последовательно соединенные приемную антенну 15, навигационный приемник 16, блок обработки и сопряжения 17, накопитель данных 18, причем выход маркерного приемника 14 соединен со вторым входом блока обработки и сопряжения 17, внутритрубный инспектирующий снаряд 19, содержащий модуль дефектоскопии 20, синхронизируемый опорный генератор 21, маркерный передатчик 22, последовательно соединенные датчик пути 23, установленный на внешней поверхности контейнера, блок вычислений и управления 24 и регистратор 25, трехкомпонентный измеритель угловой скорости 26, состоящий из трех измерителей угловой скорости 27, 28, 29, трехкомпонентный акселерометр 30, состоящий из трех акселерометров 31, 32, 33, продольный акселерометр 34, три усилителя 35, 36, 37, соединенные своими входами с выходами трехкомпонентного измерителя угловой скорости 26, датчик температуры 38, блок вычислений и управления 24 выполнен в виде бортового процессора 39 с аналого-цифровым преобразователем 40, выходы измерителей угловой скорости 27, 28, 29, усилителей 35, 36, 37, акселерометров 31, 32, 33, продольного акселерометра 34, датчика пути 23, датчика температуры 38. Соединены с соответствующими входами аналого-цифрового преобразователя 40, группа выходов которого соединена с первой системной шиной 41, с которой соединены также бортовой процессор 39 и регистратор 25, модуль дефектоскопии 20 соединен через первую системную шину 41 с бортовым процессором 39 и регистратором 25, маркерный передатчик 22 соединен через первую системную шину 41 с бортовым процессором 39, выход синхронизируемого опорного генератора 21 соединен с входом управления бортового процессора 39, причем на этапе пуска внутритрубного инспектирующего снаряда 19 вход управления синхронизируемого опорного генератора 21 соединяется со вторым выходом навигационного приемника 4 маркера камеры пуска 2, наземную подсистему 42, которая содержит блок переключения диапазонов 43, блок вычисления сигналов коррекции 44, блок вычисления оценок 45, блок идентификации смещения 46, а также сумматор 47, вычислитель координат снаряда 48, блок ввода эталонных координат 49, блок вывода информации 50, последовательно соединенные вычислитель параметра 51, вычислитель поправок 52, вычислитель координат маркеров 53, вычислитель поправок маркеров 54, вычислитель координат трубопровода 55, вычислитель координат дефектов 56, блок памяти 57, блок обработки и отображения 58, причем первый и второй выходы регистратора 25 соединены через вторую системную шину 59, соответственно, с первым и вторым входами блока переключения диапазонов 43, первая группа выходов которого соединена с первой группой входов блока идентификации смещения 46 и через сумматор 47 с первыми группами входов блока вычисления оценок 45 и блока вычисления сигналов коррекции 44, вторая группа входов которого соединена со второй группой выходов блока переключения диапазонов 43, а первый и второй выходы соединены соответственно со вторым и третьим входами блока вычисления оценок 45, третий выход регистратора 25 через вторую системную шину 59 соединен с третьим входом блока вычисления сигналов коррекции 44, первым входом вычислителя координат снаряда 48, четвертым входом блока вычисления оценок 45, выход которого соединен со вторым входом вычислителя координат снаряда 48, группа выходов блока идентификации смещения 46 соединена со второй группой входов сумматора 47, четвертый выход регистратора 25 через вторую системную шину 59 соединен со вторым входом блока идентификации смещения 46, первый выход блока ввода эталонных координат 49 через вторую системную шину 59 соединен с входом вычислителя параметра 51 и вторым входом вычислителя поправок маркеров 54, а второй выход соединен с пятым входом блока вычисления оценок 45, выход накопителя данных 6 маркера камеры пуска 2 и первый выход накопителя данных 12 маркера камеры приема 7 соединены со второй группой входов вычислителя поправок 52, первая группа выходов накопителей данных 18 маркеров трассы 131...13k соединена со второй группой входов вычислителя координат маркеров 53, второй выход накопителя данных 12 маркера камеры приема 7 и вторая группа выходов накопителей данных 18 маркеров трассы 131...13k соединены с третьей группой входов вычислителя поправок маркеров 54, третьей группой входов вычислителя координат снаряда 48, шестой группой входов блока вычисления оценок 45, четвертой группой входов блока вычисления сигналов коррекции 44, четвертый вход вычислителя поправок маркеров 54 соединен с первым выходом вычислителя координат снаряда 48, второй выход которого соединен со вторым входом вычислителя координат трубопровода 55, второй выход которого соединен со вторым входом блока памяти 57, пятый выход регистратора 25 через вторую системную шину 59 соединен с входом блока вывода информации 50, выход которого соединен со вторым входом вычислителя координат дефектов 56.
В предлагаемом изобретении, по сравнению с прототипом, за счет введенных блоков и связей повышается точность определения координат трубопровода и обеспечивается возможность определения координат дефектов трубопровода.
Работает система следующим образом. На маркере камеры пуска 2 (фиг.1) приемная антенна 3 принимает сигналы от навигационных спутников 11...1n, спутниковой радионавигационной системы, например, ГЛОНАСС, которые обрабатываются в навигационном приемнике 4, с выхода навигационного приемника 4 данные, содержащие информацию о времени измерения  (j=1,...,n - порядковый номер спутника) радионавигационных параметров, измеренных дальностях
(j=1,...,n - порядковый номер спутника) радионавигационных параметров, измеренных дальностях  до соответствующих спутников 11...1n и номера j этих спутников, поступают на вход блока обработки и сопряжения 5, где формируются в массив и сохраняются в накопителе данных 6, а также в навигационном приемнике 4 формируется высокостабильная эталонная последовательность прямоугольных импульсов, синхронизированная по принимаемым от навигационных спутников 11...1n сигналам, с единой шкалой времени спутниковой радионавигационной системы. Перед пуском снаряда 19 происходит синхронизация шкалы времени внутритрубного инспектирующего снаряда 19 со шкалой времени спутниковой радионавигационной системы, для этого второй выход навигационного приемника 4 соединяется с входом управления синхронизируемого опорного генератора 21, эталонная последовательность прямоугольных импульсов со второго выхода навигационного приемника 4 поступает на вход управления синхронизируемого опорного генератора 21, по результатам синхронизации на выходе синхронизируемого опорного генератора 21 формируется эталонный сигнал, синхронизированный с эталонной последовательностью навигационного приемника 4. Принцип синхронизации шкалы времени внутритрубного инспектирующего снаряда 19 со шкалой времени спутниковой радионавигационной системы по сигналам навигационных спутников 11...1n, аналогичен методам синхронизации, описанным, например, на с.255-257 [4]. По окончании синхронизации внутритрубный инспектирующий снаряд 19 помещают в камеру пуска, после этого его выдерживают в неподвижном состоянии в течение двух-трех минут для обеспечения начальной выставки системы при обработке данных. По окончании начальной выставки маркерный передатчик 22 включается управляющим сигналом с бортового процессора 39 и непрерывно излучает маркерный сигнал, внутритрубный инспектирующий снаряд 19 перемещается по трубопроводу давлением перекачиваемого продукта, при движении под управлением бортового процессора 39 происходит запись в регистратор 25 текущих значений системного времени t, вырабатываемых в бортовом процессоре 39 из эталонного сигнала синхронизируемого опорного генератора 21, значений кажущихся ускорений
до соответствующих спутников 11...1n и номера j этих спутников, поступают на вход блока обработки и сопряжения 5, где формируются в массив и сохраняются в накопителе данных 6, а также в навигационном приемнике 4 формируется высокостабильная эталонная последовательность прямоугольных импульсов, синхронизированная по принимаемым от навигационных спутников 11...1n сигналам, с единой шкалой времени спутниковой радионавигационной системы. Перед пуском снаряда 19 происходит синхронизация шкалы времени внутритрубного инспектирующего снаряда 19 со шкалой времени спутниковой радионавигационной системы, для этого второй выход навигационного приемника 4 соединяется с входом управления синхронизируемого опорного генератора 21, эталонная последовательность прямоугольных импульсов со второго выхода навигационного приемника 4 поступает на вход управления синхронизируемого опорного генератора 21, по результатам синхронизации на выходе синхронизируемого опорного генератора 21 формируется эталонный сигнал, синхронизированный с эталонной последовательностью навигационного приемника 4. Принцип синхронизации шкалы времени внутритрубного инспектирующего снаряда 19 со шкалой времени спутниковой радионавигационной системы по сигналам навигационных спутников 11...1n, аналогичен методам синхронизации, описанным, например, на с.255-257 [4]. По окончании синхронизации внутритрубный инспектирующий снаряд 19 помещают в камеру пуска, после этого его выдерживают в неподвижном состоянии в течение двух-трех минут для обеспечения начальной выставки системы при обработке данных. По окончании начальной выставки маркерный передатчик 22 включается управляющим сигналом с бортового процессора 39 и непрерывно излучает маркерный сигнал, внутритрубный инспектирующий снаряд 19 перемещается по трубопроводу давлением перекачиваемого продукта, при движении под управлением бортового процессора 39 происходит запись в регистратор 25 текущих значений системного времени t, вырабатываемых в бортовом процессоре 39 из эталонного сигнала синхронизируемого опорного генератора 21, значений кажущихся ускорений  , измеряемых акселерометрами 31, 32, 33, 34, угловых скоростей
, измеряемых акселерометрами 31, 32, 33, 34, угловых скоростей  , измеряемых измерителями угловых скоростей 27, 28, 29, пройденного расстояния
, измеряемых измерителями угловых скоростей 27, 28, 29, пройденного расстояния  , измеряемого датчиком пути 23, температуры t°C внутри блоков 26, 30, 34, измеряемой датчиком температуры 38, а также данных дефектоскопии |D|t с модуля дефектоскопии 20, в котором происходит диагностика состояния трубопровода при помощи датчиков и преобразование показаний датчиков в цифровой вид. При движении внутритрубного инспектирующего снаряда 19 по трубопроводу в каждом m-том (m=1,...,k - порядковый номер маркера) маркере трассы 131...13k, приемная антенна 15 принимает сигналы от навигационных спутников 11...1n, которые обрабатываются в навигационном приемнике 16. С выхода навигационного приемника 16 через блок обработки и сопряжения 17 в накопитель данных 18 поступают данные о времени приема навигационных сигналов
, измеряемого датчиком пути 23, температуры t°C внутри блоков 26, 30, 34, измеряемой датчиком температуры 38, а также данных дефектоскопии |D|t с модуля дефектоскопии 20, в котором происходит диагностика состояния трубопровода при помощи датчиков и преобразование показаний датчиков в цифровой вид. При движении внутритрубного инспектирующего снаряда 19 по трубопроводу в каждом m-том (m=1,...,k - порядковый номер маркера) маркере трассы 131...13k, приемная антенна 15 принимает сигналы от навигационных спутников 11...1n, которые обрабатываются в навигационном приемнике 16. С выхода навигационного приемника 16 через блок обработки и сопряжения 17 в накопитель данных 18 поступают данные о времени приема навигационных сигналов  (j=1,...,n - порядковый номер спутника), измеренных дальностях
(j=1,...,n - порядковый номер спутника), измеренных дальностях  до соответствующих спутников 11...1n и номера j этих спутников. Маркерный приемник 14 фиксирует максимум сигнала, излучаемого маркерным передатчиком 22 проходящего внутритрубного инспектирующего снаряда 19 и подает сигнал в блок обработки и сопряжения 17 на запись в накопитель 18 текущего времени, определяемого в навигационном приемнике 16 по сигналам от навигационных спутников 11...1n. Таким образом фиксируется время Тm прохождения внутритрубным инспектирующим снарядом 19 m-го маркера трассы 131...13k.
до соответствующих спутников 11...1n и номера j этих спутников. Маркерный приемник 14 фиксирует максимум сигнала, излучаемого маркерным передатчиком 22 проходящего внутритрубного инспектирующего снаряда 19 и подает сигнал в блок обработки и сопряжения 17 на запись в накопитель 18 текущего времени, определяемого в навигационном приемнике 16 по сигналам от навигационных спутников 11...1n. Таким образом фиксируется время Тm прохождения внутритрубным инспектирующим снарядом 19 m-го маркера трассы 131...13k.
На маркере камеры приема 7 приемная антенна 9 принимает сигналы от навигационных спутников 11...1n, которые обрабатываются в навигационном приемнике 10, с выхода навигационного приемника 10 данные, содержащие информацию о времени измерения радионавигационных параметров  (j=1,...,n - порядковый номер спутника), измеренных дальностях
(j=1,...,n - порядковый номер спутника), измеренных дальностях  до соответствующих спутников 11...1n и номера j этих спутников, поступают на вход блока обработки и сопряжения 11, где формируются в массив и сохраняются в накопителе данных 12. Маркерный приемник 8 фиксирует максимум сигнала, излучаемого маркерным передатчиком 22, внутритрубного инспектирующего снаряда 19 и подает сигнал в блок обработки и сопряжения 11 на запись в накопитель 12 текущего системного времени, определяемого в навигационном приемнике 10 по сигналам от навигационных спутников 11...1n. Таким образом фиксируется время Тпм прихода внутритрубного инспектирующего снаряда 19 в камеру приема. После прихода в камеру приема внутритрубный инспектирующий снаряд 19 извлекается из нее, далее регистратор 25 отсоединяют от бортовой аппаратуры внутритрубного инспектирующего снаряда 19 и присоединяют через вторую системную шину 59 (фиг.2) к наземной подсистеме 42. Также к наземной подсистеме 42 через вторую системную шину 59 присоединяют накопители данных 6, 12 маркера камеры пуска 2 и маркера камеры приема 7 соответственно, а также накопители данных 18 маркеров трассы 131...13k. Через блок ввода эталонных координат 49 в наземную подсистему 42 вводится информация по углу азимута ψ0 * камеры пуска, которая через вторую системную шину 59 поступает на пятый вход блока вычисления оценок 45. Информация о времени Тm прохождения снарядом 19 маркера трассы 131...13k с номером m и информация о времени Тпм прихода внутритрубного инспектирующего снаряда 19 в камеру приема с накопителей данных 18 маркеров трассы 131...13k и накопителя данных 12 маркера камеры пуска 7 соответственно, поступает в вычислитель координат снаряда 48, в блок вычисления сигналов коррекции 44 и в блок вычисления оценок 45. Далее, при работе наземной подсистемы 42 аналогично алгоритмам, описанным в прототипе [3], блок переключения диапазонов 43 определяет из каких каналов (грубого или точного отсчета) использовать в блоках 44, 45 значени я угловых скоростей. Если величины соответствующие угловым скоростям, малы, то используются каналы точного отсчета с усилителей 35, 36, 37 и с акселерометров 31, 32, 33. Если величины велики, то непосредственно с измерителей угловой скорости 27, 28, 29 и продольного акселерометра 34. В блоке идентификации смещения 46 на интервале времени начальной выставки системы в камере пуска (t∈[t0, t0+Tв], где t0, Тв - время начала и окончания выставки соответственно) определяются оценки нулевых сигналов ω0 xi измерителей угловой скорости 27, 28, 29, аналогично алгоритмам, описанным в прототипе [3], а также вырабатываются температурные поправки в оценки сигналов акселерометров 31, 32, 33, 34 и измерителей угловой скорости 27, 28, 29, используя показания t°С датчика температуры 38. Затем в сумматоре 47 производится компенсация смещения нулей в сигналах измерителей угловых скоростей 27, 28, 29, компенсированные значения угловых скоростей
до соответствующих спутников 11...1n и номера j этих спутников, поступают на вход блока обработки и сопряжения 11, где формируются в массив и сохраняются в накопителе данных 12. Маркерный приемник 8 фиксирует максимум сигнала, излучаемого маркерным передатчиком 22, внутритрубного инспектирующего снаряда 19 и подает сигнал в блок обработки и сопряжения 11 на запись в накопитель 12 текущего системного времени, определяемого в навигационном приемнике 10 по сигналам от навигационных спутников 11...1n. Таким образом фиксируется время Тпм прихода внутритрубного инспектирующего снаряда 19 в камеру приема. После прихода в камеру приема внутритрубный инспектирующий снаряд 19 извлекается из нее, далее регистратор 25 отсоединяют от бортовой аппаратуры внутритрубного инспектирующего снаряда 19 и присоединяют через вторую системную шину 59 (фиг.2) к наземной подсистеме 42. Также к наземной подсистеме 42 через вторую системную шину 59 присоединяют накопители данных 6, 12 маркера камеры пуска 2 и маркера камеры приема 7 соответственно, а также накопители данных 18 маркеров трассы 131...13k. Через блок ввода эталонных координат 49 в наземную подсистему 42 вводится информация по углу азимута ψ0 * камеры пуска, которая через вторую системную шину 59 поступает на пятый вход блока вычисления оценок 45. Информация о времени Тm прохождения снарядом 19 маркера трассы 131...13k с номером m и информация о времени Тпм прихода внутритрубного инспектирующего снаряда 19 в камеру приема с накопителей данных 18 маркеров трассы 131...13k и накопителя данных 12 маркера камеры пуска 7 соответственно, поступает в вычислитель координат снаряда 48, в блок вычисления сигналов коррекции 44 и в блок вычисления оценок 45. Далее, при работе наземной подсистемы 42 аналогично алгоритмам, описанным в прототипе [3], блок переключения диапазонов 43 определяет из каких каналов (грубого или точного отсчета) использовать в блоках 44, 45 значени я угловых скоростей. Если величины соответствующие угловым скоростям, малы, то используются каналы точного отсчета с усилителей 35, 36, 37 и с акселерометров 31, 32, 33. Если величины велики, то непосредственно с измерителей угловой скорости 27, 28, 29 и продольного акселерометра 34. В блоке идентификации смещения 46 на интервале времени начальной выставки системы в камере пуска (t∈[t0, t0+Tв], где t0, Тв - время начала и окончания выставки соответственно) определяются оценки нулевых сигналов ω0 xi измерителей угловой скорости 27, 28, 29, аналогично алгоритмам, описанным в прототипе [3], а также вырабатываются температурные поправки в оценки сигналов акселерометров 31, 32, 33, 34 и измерителей угловой скорости 27, 28, 29, используя показания t°С датчика температуры 38. Затем в сумматоре 47 производится компенсация смещения нулей в сигналах измерителей угловых скоростей 27, 28, 29, компенсированные значения угловых скоростей  , передаются в блок вычисления сигналов коррекции 44 и в блок вычисления оценок 45. В блоке вычисления сигналов коррекции 44 аналогично алгоритмам, описанным в прототипе [3], вырабатываются оценки
, передаются в блок вычисления сигналов коррекции 44 и в блок вычисления оценок 45. В блоке вычисления сигналов коррекции 44 аналогично алгоритмам, описанным в прототипе [3], вырабатываются оценки  компонент ускорений, обусловленных вращением снаряда относительно центра его подвеса, а затем вычисляются оценки проекций ускорений сил тяжести
компонент ускорений, обусловленных вращением снаряда относительно центра его подвеса, а затем вычисляются оценки проекций ускорений сил тяжести  . Далее в блоке 44 вычисляются сигналы коррекции по углам крена θ* и тангажа γ*, которые передаются в блок вычисления оценок 45, где текущие значения параметров ориентации
. Далее в блоке 44 вычисляются сигналы коррекции по углам крена θ* и тангажа γ*, которые передаются в блок вычисления оценок 45, где текущие значения параметров ориентации  вычисляются, аналогично алгоритмам прототипа [3], на основе корректируемых кинематических уравнений Эйлера, текущие значения параметров ориентации
вычисляются, аналогично алгоритмам прототипа [3], на основе корректируемых кинематических уравнений Эйлера, текущие значения параметров ориентации  передаются в вычислитель координат снаряда 48, где формируется матрица направляющих косинусов и производится подсчет координат снаряда в каждый момент времени Хинсt, Yинсt, Zинсt, аналогично алгоритмам прототипа [3].
передаются в вычислитель координат снаряда 48, где формируется матрица направляющих косинусов и производится подсчет координат снаряда в каждый момент времени Хинсt, Yинсt, Zинсt, аналогично алгоритмам прототипа [3].
Измеренные и записанные в накопители 6, 12 на маркере камеры пуска 2 и маркере камеры приема 7 соответственно, значения радионавигационных параметров  , до соответствующих спутников 11...1n, времени измерения
, до соответствующих спутников 11...1n, времени измерения  номера j этих спутников с накопителей 6, 12 через вторую системную шину 59 поступают на второй вход вычислителя поправок 52, первый вход которого соединен с выходом вычислителя параметра 51, который определяет эталонные значения радионавигационных параметров RПК j, RПМ j маркера камеры пуска 2 и маркера камеры приема 7, на основе эталонных координат фазовых центров (XПК, YПК, ZПК), (XПМ, YПМ, ZПМ) приемных антенн 3, 9 соответственно, которые вводятся в вычислитель параметра 51 при помощи блока ввода эталонных координат 49, и эфемерид
номера j этих спутников с накопителей 6, 12 через вторую системную шину 59 поступают на второй вход вычислителя поправок 52, первый вход которого соединен с выходом вычислителя параметра 51, который определяет эталонные значения радионавигационных параметров RПК j, RПМ j маркера камеры пуска 2 и маркера камеры приема 7, на основе эталонных координат фазовых центров (XПК, YПК, ZПК), (XПМ, YПМ, ZПМ) приемных антенн 3, 9 соответственно, которые вводятся в вычислитель параметра 51 при помощи блока ввода эталонных координат 49, и эфемерид  каждого из спутников 11...1n. Вычислитель поправок 52 вычисляет значения поправок радионавигационных параметров по каждому из спутников 11...1n для маркера камеры пуска 2 и маркера камеры приема 7 в соответствии с алгоритмами, приведенными, например, на с.285-288 [4]:
каждого из спутников 11...1n. Вычислитель поправок 52 вычисляет значения поправок радионавигационных параметров по каждому из спутников 11...1n для маркера камеры пуска 2 и маркера камеры приема 7 в соответствии с алгоритмами, приведенными, например, на с.285-288 [4]:


С выхода вычислителя поправок 52 сигналы, в которых содержится информация о номере спутника j, времени приема навигационного сигнала tПК j, tПМ j, поправках к радионавигационным параметрам до каждого спутника ΔRПК j, ΔRПМ j для маркера камеры пуска 2 и маркера камеры приема 7, соответственно, поступают на первый вход вычислителя координат маркеров 53, на второй вход которого с накопителей 18 маркеров трассы 131...13k, подсоединенных к наземной подсистеме 42 через вторую системную шину 59, поступают данные о времени приема навигационных сигналов  , измеренных дальностях до соответствующих спутников 11...1n и номера j этих спутников. Далее в вычислителе координат маркеров 53 происходит корректировка измеренных дальностей в соответствии с алгоритмами, приведенными, например, на с.288 [4]:
, измеренных дальностях до соответствующих спутников 11...1n и номера j этих спутников. Далее в вычислителе координат маркеров 53 происходит корректировка измеренных дальностей в соответствии с алгоритмами, приведенными, например, на с.288 [4]:


Поправки ΔRПК j маркера камеры пуска 2 используются для корректировки дальностей , измеренных на ближайших к маркеру камеры пуска 2 маркерах трассы 131...13k (установленных от маркера камеры пуска 2 до середины диагностируемого участка), а поправки ΔRПМ j маркера камеры приема 7 используются для корректировки дальностей , измеренных на ближайших к маркеру камеры приема 7 маркерах трассы 131...13k (установленных от середины диагностируемого участка до маркера камеры приема 7). В результате этой коррекции получают откорректированные значения радионавигационных параметров  , которые используются в блоке 53 для вычисления точных координат Xm, Ym, Zm маркеров трассы 131...13k. Алгоритмы расчета координат, которые можно использовать для расчета координат маркеров трассы 131...13k по откорректированным радионавигационным параметрам, приведены, например, на с.220-223 [4], на с.62-64 [5].
, которые используются в блоке 53 для вычисления точных координат Xm, Ym, Zm маркеров трассы 131...13k. Алгоритмы расчета координат, которые можно использовать для расчета координат маркеров трассы 131...13k по откорректированным радионавигационным параметрам, приведены, например, на с.220-223 [4], на с.62-64 [5].
С выхода вычислителя координат маркеров 53 данные о координатах маркеров трассы 131...13k поступают на вход вычислителя поправок маркеров 54, на третий вход которого с накопителей данных 18 и накопителя данных 12 через вторую системную шину 59 поступает информация о времени Tm прохождения снарядом 19 маркера трассы с номером m и времени ТПМ прихода снаряда в камеру приема соответственно, а на четвертый вход, с выхода вычислителя координат снаряда 48, поступают данные о координатах  , внутритрубного инспектирующего снаряда 19 в каждый момент времени.
, внутритрубного инспектирующего снаряда 19 в каждый момент времени.
В вычислителе поправок маркеров 54 вычисляются поправки по каждой координате для маркеров трассы 131...13k и для маркера камеры приема 7, для этого определяются координаты внутритрубного инспектирующего снаряда 19  в момент времени Тm прохождения маркера трассы 131...13k с номером m, а также координат снаряда 19
в момент времени Тm прохождения маркера трассы 131...13k с номером m, а также координат снаряда 19  в момент времени ТПМ прихода в камеру приема путем сопоставления времени Тm и ТПМ соответственно и координат внутритрубного инспектирующего снаряда 19 в эти моменты времени, исходя из данных о координатах снаряда 19 в каждый момент времени
в момент времени ТПМ прихода в камеру приема путем сопоставления времени Тm и ТПМ соответственно и координат внутритрубного инспектирующего снаряда 19 в эти моменты времени, исходя из данных о координатах снаряда 19 в каждый момент времени  , определенных в блоке
, определенных в блоке
48. Далее поправки для каждого маркера трассы 131...13k вычисляются в блоке 54, как разность между координатами  снаряда 19 в момент времени Тm и координатами Xm, Ym, Zm m-того маркера трассы 131...13k, определенными в вычислителе координат маркеров 53.
снаряда 19 в момент времени Тm и координатами Xm, Ym, Zm m-того маркера трассы 131...13k, определенными в вычислителе координат маркеров 53.
где Δm - поправка, учитывающая расстояние от приемной антенны 15 до оси трубопровода в месте установки маркера m. Поправки для маркера камеры приема 7 вычисляются в блоке 54, как разность между координатами снаряда  в момент времени ТПМ прихода снаряда 19 в камеру приема и эталонными координатами XПМ, YПМ, ZПМ фазового центра приемной антенны 9, которые поступают на второй вход блока 54 через вторую системную шину 59 с блока ввода эталонных координат 49,
в момент времени ТПМ прихода снаряда 19 в камеру приема и эталонными координатами XПМ, YПМ, ZПМ фазового центра приемной антенны 9, которые поступают на второй вход блока 54 через вторую системную шину 59 с блока ввода эталонных координат 49,
где ΔПМ - поправка, учитывающая расстояние от приемной антенны 9 до оси камеры приема в месте установки маркера камеры приема 7. Поправки маркера камеры пуска 2 в блоке 54 приравниваются к нулю,
ΔXПК=0,
ΔYПК=0,
ΔZПК=0.
С выхода вычислителя поправок маркеров 54 поправки (ΔXm, ΔYm, ΔZm), (ΔXПМ, ΔYПМ, ΔYПМ), (ΔXПК, ΔYПК, ΔYПК) маркеров трассы 131...13k, маркера камеры приема 7 и маркера камеры пуска 2 соответственно, поступают на вход вычислителя координат трубопровода 55, на второй вход которого, со второго выхода вычислителя координат снаряда 48 поступают данные о координатах снаряда 19 в каждый момент времени, которые являются также координатами трубопровода, определенными с большой погрешностью по данным блоков 27, 28, 29, 31, 32, 33, 34 снаряда 19. В вычислителе координат трубопровода 55 происходит коррекция координат снаряда 19 (координат трубопровода) с использованием поправок, определенных в блоке 54. Коррекция ведется по участкам между маркерами трассы 131...13k, поправки маркера с номером m используются для коррекции координат трубопровода от маркера m до середины участка между маркерами m и m+1,



затем поправки маркера с номером m+1 используются для коррекции координат трубопровода от маркера m+1 до середины участка между маркерами m и m+1,




Откорректированная траектория трубопровода между двумя соседними маркерами трассы формируется в блоке 55 из двух частей  и
и  .
.
Аналогичная коррекция и формирование траектории проводится в блоке 55 для участка между маркером трассы 13k и маркером камеры приема 7, а также для участка между маркером камеры пуска 2 и маркером трассы 131, используя поправки ΔХПМ, ΔYПМ, ΔZПМ маркера камеры приема 7, поправки |ΔXm, ΔYm, ΔZm|m=k маркера трассы 13k, а также нулевые поправки ΔХПК, ΔYПК, ΔZПК маркера камеры пуска 2, поправки |ΔXm, ΔYm, ΔZm|m=1 маркера трассы 131, соответственно.
Массив откорректированных координат трубопровода на участках между маркерами трассы, на участке между маркером камеры приема 7 и маркером 13k, а также на участке между маркером камеры пуска 2 и маркером трассы 131 является массивом откорректированных координат трассы трубопровода (Xt Yt Zt) в каждый момент системного времени t.
С выхода вычислителя координат трубопровода 55 данные о координатах оси трубопровода (Xt Yt Zt) поступают на вход вычислителя координат дефектов 56, на второй вход которого с блока вывода информации 50 поступает информация о времени обнаружения дефекта Тд. Время, соответствующее опасным дефектам, координаты которых необходимо определить, определяется в блоке 50 по данным дефектоскопии |D|t, которые поступают на вход блока 50 с пятого выхода регистратора 25 через вторую системную шину 59 и содержат информацию о показаниях датчиков дефектоскопии модуля дефектоскопии 20, в каждый момент системного времени, вырабатываемого в бортовом процессоре 39. Методика анализа показаний датчиков дефектоскопии и определения времени Тд приведена, например, в [6].
Вычисление координат дефектов |XД YД ZД| в вычислителе координат дефектов 56 происходит сопоставлением времени обнаружения дефекта Тд и координат (Xt Yt Zt) оси трубопровода в этот момент времени. С выхода вычислителя координат дефектов 56 данные о координатах дефектов поступают на вход блока памяти 57 для хранения, на второй вход которого поступают данные о координатах трубопровода со второго выхода вычислителя координат трубопровода 55. С выхода блока памяти 57 данные о координатах трубопровода и дефектов поступают на вход блока обработки и отображения 58, в котором происходит обработка данных о координатах трубопровода и дефектов для их отображения в удобном для эксплуатации виде.
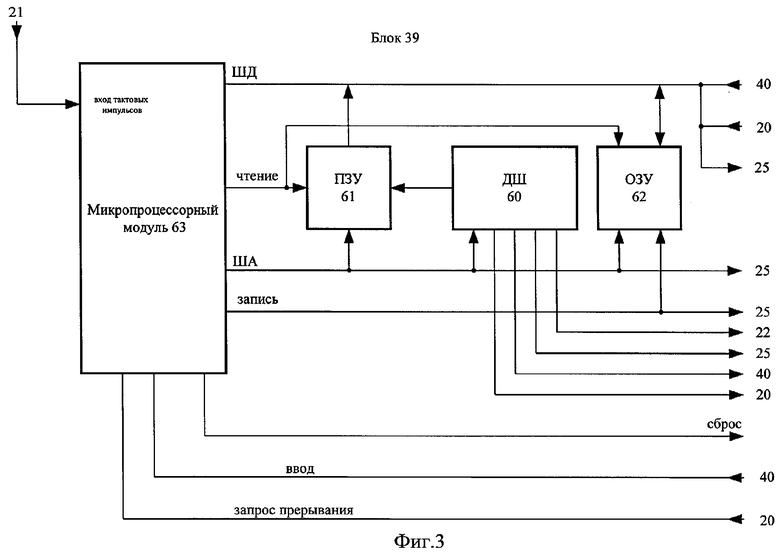
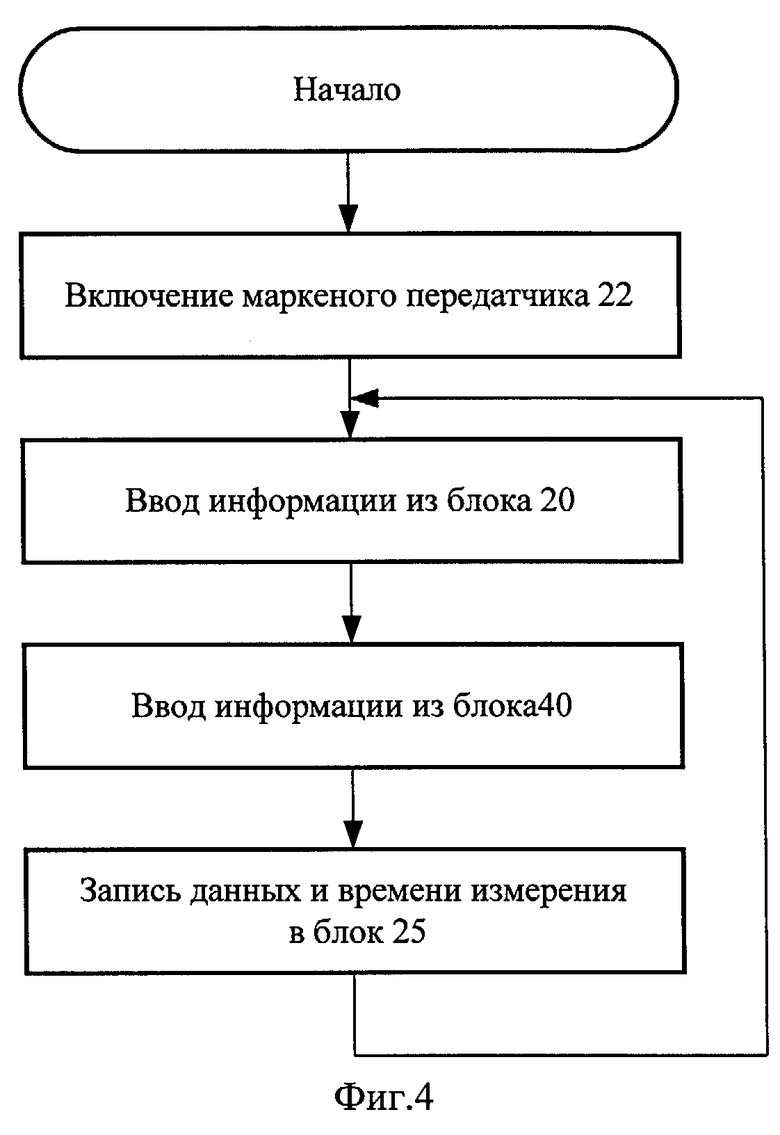
В системе блоки 5, 11, 17, 39, 43, 44, 45, 46, 48, 51, 52, 53, 54, 55, 56 могут быть реализованы как на элементах непрограммируемой жесткой логики так и на основе микропроцессора по типовой структурной схеме, описанной, например, на с.38 [7]. Структурная схема варианта построения блоков 5, 11, 17, 39, 43, 44, 45, 46, 48, 51, 52, 53, 54, 55, 56 приведена на фиг.3, где показано, например, подключение блоков 20, 21, 22, 25, 40 к блоку 39. Дешифратор 60 обеспечивает выбор постоянного 61 или оперативного (ОЗУ) 62 запоминающего устройства, в которых хранятся программа, константы или текущая информация соответственно. Микропроцессорный модуль 63 выполняет обработку и обмен информацией в соответствии с блок-схемой (фиг.4), и связан с блоками 60, 61, 62 шиной адреса (ША), а с блоками 61, 62 информационной шиной данных (ШД), а также имеет управляющий выход-чтение для управления постоянным 61 и оперативным 62 запоминающими устройствами и выход-запись для управления ОЗУ 62. Для ввода информации в регистратор 25 используется шина данных, шина адреса, сигнал запись и третий управляющий выход с дешифратора адреса 60. Первый управляющий выход дешифратора адреса 60 и вход - запрос прерывания используется для ввода информации по шине данных в блок 39 из блока 20, второй управляющий выход дешифратора адреса 60 и вход - ввод используется для ввода информации по шине данных в блок 39, из блока 40, четвертый управляющий выход дешифратора адреса 60 используется для управления маркерным передатчиком 22. Эталонная последовательность тактовых импульсов с выхода синхронизируемого опорного генератора 21 подается на вход управления (вход тактовых импульсов) микропроцессорного модуля 63. При реализации блоков 5, 11, 17, 54, 56 на базе микропроцессора К1810 они состоят из: микропроцессорного модуля 63, который состоит из двух интегральных микросхем центрального процессора К1810ВМ88, двух регистров К1810ИР82, шинного формирователя К1810ВА86 и дешифратора К1533ИД3. При реализации блоков 39, 43, 51, 52 на базе микропроцессора К1810 микропроцессорный модуль 63 состоит из шести микросхем центрального процессора К1810ВМ88. Вычислители 44, 45, 46, 48, 53, 55 в связи с большим объемом вычислений и сложностью управляющих алгоритмов и программ необходимо реализовать, например, на основе микропроцессора Intel 80386 по типовой структуре, описанной на с.13 [8]. Блок ввода эталонных координат 49 представляет собой клавиатуру и дисплей, которые подключаются к системной шине 59 при помощи контроллера, например, на базе микросхемы контроллера клавиатуры и индикации КР1043ВТ1. В качестве накопителей данных 6, 12, 18 и регистратора 25 можно использовать, например, малогабаритные твердотельные флэш-диски с.146-155 [9]. Синхронизируемый опорный генератор 21 может быть реализован по структурной схеме, приведенной, например, на рис.17.1 [4], с использованием в качестве эталона частоты прецизионного малошумящего кварцевого генератора, например, типа ГК-54-ТС [10]. АЦП 40 представляет собой многоканальный аналого-цифровой преобразователь и может быть выполнен на базе нескольких 16-ти разрядных микросхем АЦП, например, AD7723. Модуль дефектоскопии 20 представляет собой комплекс датчиков, диагностирующих состояние трубопровода, АЦП преобразующее показания датчиков в цифровой вид и контроллера управления, в качестве модуля дефектоскопии можно использовать, например, комплексы дефектоскопии, описанные в [6], [11], [12]. В качестве маркерного передатчика 22 и маркерных приемников 8, 14 можно использовать, например, комплект передатчика типа ПДС и низкочастотный локатор типа НЧЛ [13]. Навигационные приемники 4, 10, 16 могут быть выполнены в соответствии с рис.38 [5], рис.9.5 [4]. Блоком памяти 57 может служить накопитель на перезаписываемых оптических дисках (CDRW). Блок обработки и отображения 58 реализуется на IBM совместимом компьютере с устройством для считывания оптических дисков CDRW и монитором для отображения полученной координатной информации в удобном для эксплуатации виде. Одним из способов повышения точности определения координат трубопровода и координат дефектов в заявляемой системе является привязка временной шкалы системы к временной шкале спутниковой радионавигационной системы 11...1n, тем самым повышается точность временной привязки и точность взаимной синхронизации измерений системы маркеров и оборудования внутритрубного инспектирующего снаряда 19.
Для проверки точности системы проводилось математическое моделирование ее работы на ЭВМ с учетом погрешности трехкомпонентных измерителей угловой скорости, равной 5 град/час, погрешности акселерометров, равной 3·10-3 м/c2, нестабильности частоты эталона частоты, синхронизируемого опорного генератора, за сутки работы равной ≤±1×10-8, погрешность определения координат маркеров при помощи навигационных приемников СКО - 0.2 м. По результатам моделирования погрешность определения координат продольной оси трубопровода и координат дефектов составляет 1.5-2 м.
Литература
1. Патент РФ №2084757.
2. Патент РФ №2102704.
3. Патент РФ №2197714.
4. Сетевые спутниковые радионавигационные системы. Под ред. B.C.Шебшаевича, Москва, Радио связь, 1993, с.288, рис.20.3.
5. Бортовые устройства спутниковой радионавигации./Под ред. B.C.Шебшаевича. М.: Транспорт, 1988.
6. Кулешев А.Н. Обработка данных, поступающих от дефектоскопа "Ультраскан". - Приложение к журналу ТТН №4, 1996 г.
7. Микропроцессорный комплект К1810. Структура, программирование, применение: Справочная книга./Под ред. Ю.М.Казаринова. М.: Высшая школа, 1990.
8. Брамм П., Брамм Д. Микропроцессор 80386 и его программирование: Пер. с англ. - М.: Мир, 1990, - 448 с., ил.
9. Левин В.И. Носители информации в цифровом веке/Под общ. ред. Д.Г.Красковского. - М.: Компьютер Пресс, 2000 г.
10. Прецизионные твердотельные генераторы, ОАО "Морион" - 2003 г.
11. Рыбка С.А., Белкин А.А., Кулешев А.Н. Ультразвуковой дефектоскоп ≪Ультраскан CD≫. - Приложение к журналу ТТН №9, 2000 г.
12. Использование компанией TransCanada ультразвуковых дефектоскопов. - Приложение к журналу ТТН №3, 2002 г.
13. Супрунчик В.В., Коновалов Н.М., Мызников М.О. Система сопровождения внутритрубных снарядов ССВС-001. - Приложение к журналу ТТН №12, 2003 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2001 |
|
RU2197714C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2010 |
|
RU2437127C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРОДОЛЬНОГО ПРОФИЛЯ ЗАТОПЛЕННОГО ПОДЗЕМНОГО ТРУБОПРОВОДА | 2009 |
|
RU2406918C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОДОЛЬНОГО ПРОФИЛЯ ЗАТОПЛЕННОГО ПОДЗЕМНОГО ТРУБОПРОВОДА | 2009 |
|
RU2406018C2 |
| КОМПЛЕКС ДЛЯ ПОЛУНАТУРНЫХ ИСПЫТАНИЙ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ ВНУТРИТРУБНЫХ ИНСПЕКТИРУЮЩИХ СНАРЯДОВ | 2012 |
|
RU2511057C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛОКАЛЬНЫХ УЧАСТКОВ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ С МАКСИМАЛЬНОЙ ДЕФОРМАЦИЕЙ | 2004 |
|
RU2272248C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛОКАЛЬНЫХ СМЕЩЕНИЙ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2001 |
|
RU2206871C2 |
| Способ измерения радиусов изгиба трубопровода на основе данных диагностического комплекса для определения положения трубопровода | 2017 |
|
RU2655614C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЛАНОВО-ВЫСОТНОГО ПОЛОЖЕНИЯ ПОДЗЕМНОГО МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2012 |
|
RU2527902C2 |
| УСТРОЙСТВО ПОИСКА МЕСТ УТЕЧЕК МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2010 |
|
RU2439520C1 |
Изобретение относится к контрольно-измерительной технике и может использоваться для определения координат трассы (оси) и координат дефектов подземного трубопровода. Техническим результатом изобретения является повышение точности определения координат трассы подземного трубопровода и определение координат дефектов подземного трубопровода. Система для определения координат трассы и координат дефектов подземного трубопровода состоит из навигационных спутников, маркера камеры пуска, состоящего из последовательно соединенных навигационного приемника, блока обработки и сопряжения, накопителя данных, маркера камеры приема и маркеров трассы, которые состоят соответственно из маркерного приемника, последовательно соединенных навигационного приемника, блока обработки и сопряжения, накопителя данных и, внутритрубного инспектирующего снаряда, состоящего из модуля дефектоскопии, синхронизируемого опорного генератора, маркерного передатчика, датчика пути, блока вычислений и управления, регистратора, трехкомпонентного измерителя угловой скорости, трехкомпонентного акселерометра и продольного акселерометра, наземной подсистемы. Перед пуском внутритрубного инспектирующего снаряда происходит синхронизация его синхронизируемого опорного генератора с временной шкалой спутниковой радионавигационной системы. Во внутритрубном инспектирующем снаряде осуществляется запись в регистратор данных модуля дефектоскопии, трехкомпонентного измерителя угловой скорости, трехкомпонентного акселерометра, продольного акселерометра, датчика пути, датчика температуры и текущего времени. На маркере камеры пуска осуществляется запись радионавигационных параметров и текущего времени, на маркерах трассы и маркере камеры пуска осуществляются записи радионавигационных параметров, времени прохода внутритрубного инспектирующего снаряда и текущего времени. В наземной подсистеме по накопленным данным происходит вычисление координат трубопровода и координат дефектов. 4 ил.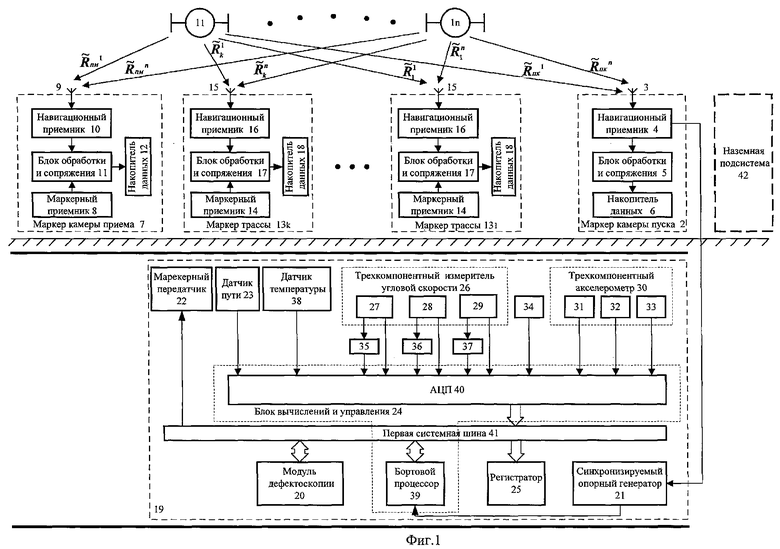
Система для определения координат трассы и координат дефектов подземного трубопровода, содержащая маркеры трассы, внутритрубный инспектирующий снаряд, включающий герметичный контейнер, эластичные манжеты, жестко закрепленные в носовой и хвостовой частях контейнера, последовательно соединенные датчик пути, установленный на внешней поверхности контейнера, блок вычислений и управления и регистратор, трехкомпонентный измеритель угловой скорости и трехкомпонентный акселерометр, размещенные внутри контейнера, подключенные к информационным входам блока вычислений и управления, продольный акселерометр, три усилителя, соединенные своими входами с выходами трехкомпонентного измерителя угловой скорости, датчик температуры, которые расположены внутри контейнера и соединены через первую системную шину с регистратором, блок вычислений и управления выполнен в виде бортового процессора с аналого-цифровым преобразователем, наземную подсистему, состоящую из блока переключения диапазонов, блока вычисления сигналов коррекции, блока вычисления оценок, блока идентификации смещения, а также сумматора, вычислителя координат снаряда, причем первый и второй выходы регистратора соединены через вторую системную шину соответственно с первым и вторым входами блока переключения диапазонов, первая группа выходов которого соединена с первой группой входов блока идентификации смещения и через сумматор с первыми группами входов блока вычисления оценок и блока вычисления сигналов коррекции, вторая группа входов которого соединена со второй группой выходов блока переключения диапазонов, а первый и второй выходы соединены соответственно со вторым и третьим входами блока вычисления оценок, третий выход регистратора через вторую системную шину соединен с третьим входом блока вычисления сигналов коррекции, первым входом вычислителя координат снаряда, четвертым входом блока вычисления оценок, выход которого соединен со вторым входом вычислителя координат снаряда, группа выходов блока идентификации смещения соединена со второй группой входов сумматора, четвертый выход регистратора через вторую системную шину соединен со вторым входом блока идентификации смещения, отличающаяся тем, что в нее вводится n навигационных спутников, маркер камеры пуска, состоящий из последовательно соединенных приемной антенны, навигационного приемника, блока обработки и сопряжения, накопителя данных, маркер камеры приема, состоящий из маркерного приемника, последовательно соединенных приемной антенны, навигационного приемника, блока обработки и сопряжения, накопителя данных, причем выход маркерного приемника соединен со вторым входом блока обработки и сопряжения, в каждый из маркеров трассы вводится маркерный приемник, последовательно соединенные приемная антенна, навигационный приемник, блок обработки и сопряжения, накопитель данных, причем выход маркерного приемника соединен со вторым входом блока обработки и сопряжения, во внутритрубный инспектирующий снаряд вводится модуль дефектоскопии, синхронизируемый опорный генератор и маркерный передатчик, модуль дефектоскопии соединен через первую системную шину с бортовым процессором и регистратором, маркерный передатчик соединен через первую системную шину с бортовым процессором, выход синхронизируемого опорного генератора соединен с входом управления бортового процессора, причем на этапе пуска внутритрубного инспектирующего снаряда вход управления опорного генератора соединяется со вторым выходом навигационного приемника маркера камеры пуска, в состав наземной подсистемы вводится блок ввода эталонных координат, блок вывода информации, последовательно соединенные вычислитель параметра, вычислитель поправок, вычислитель координат маркеров, вычислитель поправок маркеров, вычислитель координат трубопровода, вычислитель координат дефектов, блок памяти, блок обработки и отображения, первый выход блока ввода эталонных координат через вторую системную шину соединен с входом вычислителя параметра и вторым входом вычислителя поправок маркеров, а второй выход соединен с пятым входом блока вычисления оценок, выход накопителя данных маркера камеры пуска и первый выход накопителя данных маркера камеры приема соединены со второй группой входов вычислителя поправок, первая группа выходов накопителей данных маркеров трассы соединена со второй группой входов вычислителя координат маркеров, второй выход накопителя данных маркера камеры приема и вторая группа выходов накопителей данных маркеров трассы соединены с третьей группой входов вычислителя поправок маркеров, третьей группой входов вычислителя координат снаряда, шестой группой входов блока вычисления оценок, четвертой группой входов блока вычисления сигналов коррекции, четвертый вход вычислителя поправок маркеров соединен с первым выходом вычислителя координат снаряда, второй выход которого соединен со вторым входом вычислителя координат трубопровода, второй выход которого соединен со вторым входом блока памяти, пятый выход регистратора через вторую системную шину соединен с входом блока вывода информации, выход которого соединен со вторым входом вычислителя координат дефектов.
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2001 |
|
RU2197714C1 |
| СПОСОБ ОБРАБОТКИ ДАННЫХ ОБСЛЕДОВАНИЯ, СОБРАННЫХ ДЛЯ ПОДЗЕМНОГО ИССЛЕДОВАНИЯ, И УСТРОЙСТВО ДЛЯ ПОДЗЕМНОГО ИССЛЕДОВАНИЯ | 1991 |
|
RU2095828C1 |
| УСТРОЙСТВО ДЛЯ НАХОЖДЕНИЯ ДЕФЕКТОВ В СТЕНКЕ ПОДЗЕМНОГО ТРУБОПРОВОДА | 0 |
|
SU246667A1 |
| US 5557969 A, 24.09.1996 | |||
| ГИДРОДИНАМИЧЕСКАЯ ПЕРЕДАЧА ДЛЯ ЭЛЕКТРОВОЗА С БЕСКОЛЛЕКТОРНЫМИ ТЯГОВЫМИ ЭЛЕКТРОДВИГАТЕЛЯМИ | 1967 |
|
SU225239A1 |
| WO 03048713 A1, 12.06.2003. | |||

