Z
4а
СО
о to Изобретение относится к электротехнике, а именно к электроприводу переменного тока на базе асинхронног двигателя с фазным ротором, и может быть использовано, например, в судовом и металлургическом электрооборудовании, где необходимо стабилияиро- вать момент нагрузки и регулировать скорость вращения в зоне малых значений.
Цель изобретения - уменьшение потерь электроз нергии путем снижения .потребления э-лектроприводом реактив- .ной мощности из сети переменного тока при больших скольжениях.
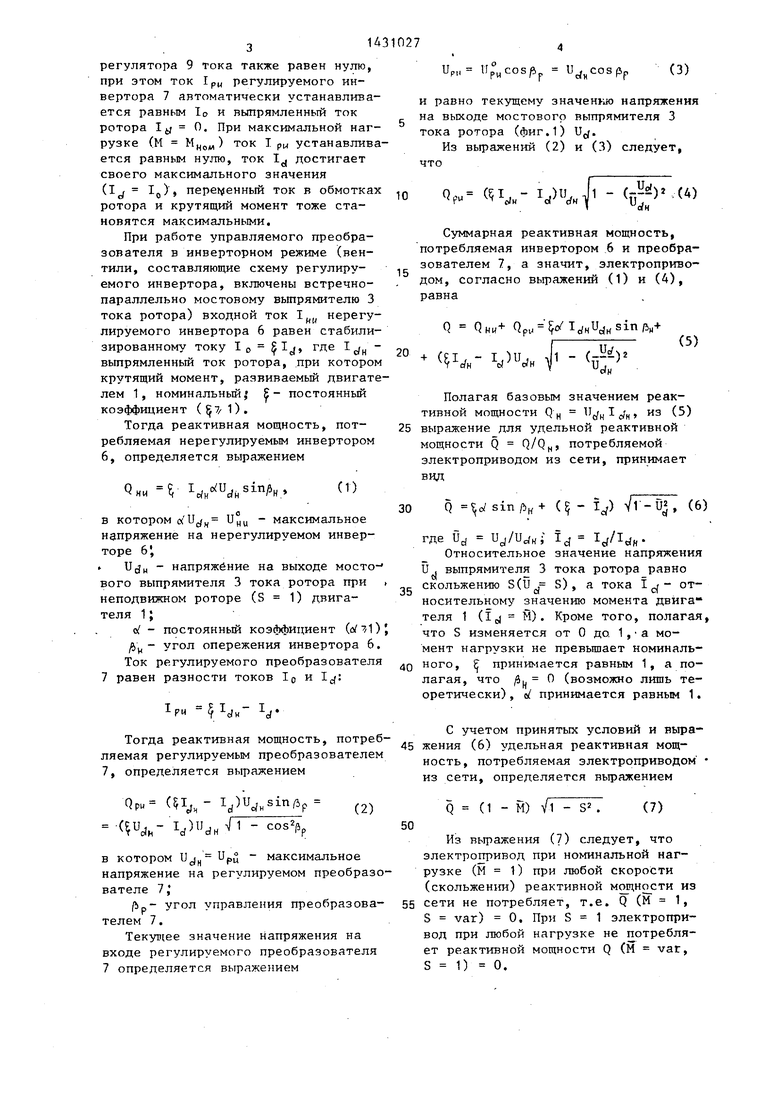
На фиг,1 представлена функцио- .нальная схема электропривода перемен ного тока, на фиг.2 - пример замкнутой двухконтурной системы подчиненного регулирования; на фиг.З - расчетные зависимости потребления электроприводом реактивной мощности в функции момента.
Электропривод переменного тока содержит асинхронный двигатель 1 (фиг.1) с фазным ротором, обмотки статора которого предназначены для подключения к сети 2 переменного тока. Выводы обмоток ротора подключены к входу первого мостового вьш- рямителя 3, катодная группа вентилей которого соединена с анодной группой вентилей второго мостового выпрямителя 4. Трехфазный вход мостового выпрямителя 4 подключен к выводам обмоток статора через параметрически стабилизатор 5 переменного тока, Трехфазный.выход ведомого сетью инвертора 6 соединен с выводами обмоток статора. Анодная группа вентилей ведомого сетью инвертора 6 соединена с катодной группой вентилей второго мостового выпрямителя 4, а катодная группа вентилей названного инвертора - с анодной группой вентилей первого мостового выпрямителя. Трехфазный выход управляемого вентильного преобразователя 7 предназначен для подключения к сети 2 переменного тока, его катодная и анодная группы вентилей соединены соответственно с катодной и анодной группами вентилей первого мостового выпрямителя 3.
В замкнутой двухфазной системе подчиненного регулирования угловой скорости ротора электродвигателя с внутренним контуром регулирования крутящего момента вход управления
0
5
0
5
0
5
0
5
0
5
вентильного преобразователя 7 соединен с выходом системы 8 импульсно- фазового управления (фиг.2), вход которого подключен к выходу регулятора 9 тока. Вход регулятора 9 тока подсоединен к выходу сумматора 10 токов, инвертирующий вход которого соединен с выходом датчика 11 выпрямленного тока ротора, а неинвертирующий - с выходом регулятора 12 частоты вращения. Датчик 11 тока своим входом по выпрямленному току подсоединен между катодной группой вентилей первого мостового выпрямителя 3 и катодной группой вентилей управляемого вентильного преобразователя 7, а регулятор 12 частоты вращения своим входом - к выходу сумматора 13 частоты вращения, неинвертирующий вход которого предназначен для задания требуемого значения частоты вращения, а инвертирующий вход подключён к выходу датчика 14 частоты вращения.
Электропривод переменного тока работает следующим образом.
Сигнал задания частоты вращения Ujj определяет выходной сигнал регулятора 12 частоты вращения, а следовательно, выходной сигнал регулятора 9 тока, изменение которого определяет угол управления вентилями управляемого преобразователя 7, работающего в режиме инвертирования по отношению к параметрическому стабилизатору 5 переменного тока. Угол управления преобразователем 7 устанавливается посредством системы 8 импульсно-фазового управления и изменяется так, что при отсутствии сигнала ток Ipi, управляемого преобразователя 7 равен выпрямленному току 1(5 стабилизатора 5 тока, выпрямленный ток ротора Т- с 1ри при этом равен нулю, а с увеличением сигнала ) ток 1рн уменьшается, увеличивается 1) следовательно, ток в обмотках ротора двигателя 1, растет крутящий момент и ротор двигателя 1 разгоняется до заданной частоты вращения, контролируемой датчиком 14 частоты вращения.
При изменении момента нагрузки во время работы электропривода частота вращения благодаря двухконтурной системе подчиненного регулирования стабилизируется на заданном уровне. Когда момент нагрузки на валу двигателя 1 равен нулю, сигнал на выходе
регулятора 9 тока также равен нулю, при этом ток 1р„ регулируемого инвертора 7 автоматически устанавливается равным 1о и вьтрямленный ток ротора 1fcf 0. При максимальной нагрузке (М ) ток I ри устанавливается равным нулю, ток 1 достигает своего максимального значения (Ij TO) пере1 енный ток в обмотках ротора и крутящий момент тоже становятся максимальными.
При работе управляемого преобразователя в инверторном режиме (вентили, составляющие схему регулируемого инвертора, включены встречно- параллельно мостовому вьтрямителю 3 тока ротора) входной ток T нерегулируемого инвертора 6 равен стабилизированному току I о - Ij где - вьтрямленный ток ротора, при котором крутящий момент, развиваемьш двигателем 1, номинальный, - постоянный коэффициент (7/1).
Тогда реактивная мощность, потребляемая нерегулируемым инвертором 6, определяется выражением
QHM V .
(1)
в котором ( - максимальное напряжение на нерегулируемом инверторе 6,
U(jH - напряжение на выходе мосто- вого выпрямителя 3 тока ротора при . неподвижном роторе () двигателя 1;
0 - постоянный коэффициент ();
угол опережения инвертора 6.
Ток регулируемого преобразователя 7 равен разности токов 1о и
рн
Гс/и dТогда реактивная мощность, потребляемая регулируемым преобразователем 7, определяется выражением
IT
- рн
ри
COS ft,
4
и
cos
(Jp
(3)
и равно текущему значен ;ю напряжения на выходе мостового выпрямителя 3 тока ротора (фиг,1) .
Из вьфажений (2) и (3) следует, что
Ы..
dH
).(4)
Суммарная реактивная мощность, потребляемая инвертором 6 и преобразователем 7, а значит, электроприводом, согласно вьфажений (1) и (4), равна
Q QHH+ Qpu /Tt нU кSin/i„+
F
(5)
Полагая базовым значением реактивной мощности Q 11(/ц Л выражение для удельной реактивной мощности Q Q/Q, потребляемой электроприводом из сети, принимает вид
Q sin/bH+ ( - Т-) где Urf U /Uj« i lyi
h-u, (6)
и
Ын Относительное значение напряжения
выпрямителя 3 тока ротора равно
скольжению S(l S) , а тока I с( - относительному значению момента двигателя 1 (1|з) М). Кроме того, полагая, что S изменяется от О до. 1, а момент нагрузки не превышает номинального, принимается равным 1, а полагая, что п О (возможно лишь теоретически) , а принимается равным 1.
С учетом принятых условий и вьфа- жения (6) удельная реактивная мощность, потребляемая электроприводом из сети, определяется вьфажением
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1986 |
|
SU1379933A2 |
| Электропривод переменного тока | 1987 |
|
SU1476590A1 |
| Электропривод переменного тока | 1985 |
|
SU1272463A1 |
| Способ управления асинхронным двигателем с фазным ротором | 1987 |
|
SU1408516A1 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2007 |
|
RU2342767C1 |
| Электропривод переменного тока | 1990 |
|
SU1725360A1 |
| Стенд для испытания передач | 1978 |
|
SU777537A1 |
| Электропривод переменного тока | 1983 |
|
SU1100705A1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 2017 |
|
RU2661343C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2002 |
|
RU2237344C2 |
Изобретение относится к электротехнике и может быть использовано в судовом и металлургическом оборудовании. Целью изобретения является уменьшение потерь электроэнергии путем снижения потребления реактивной мощности из сети при больших скольжениях. Электропривод переменного тока содержит асинхронный электродвигатель (АД) 1 с фазным ротором. В цепь ро- тора включены соединенные между собой мостовые вьтрямители (MB) 4, 3 и ведомый сетью инвертор 6. Трехфазный вход MB 4 через параметрический стабилизатор 5, а трехфазный выход инвертора 6 непосредственно подключены к выводам обмотки статора АД 1. Трех- фазньш выход управляемого вентильного преобразователя 7 подключен к сети, его катодная и анодная группы вентилей соединены соответственно с катодной и анодной группами вентилей MB 3. Такое подключение позволяет работать преобразователю 7 в режиме малых углов управления. 3 ил. с (Л с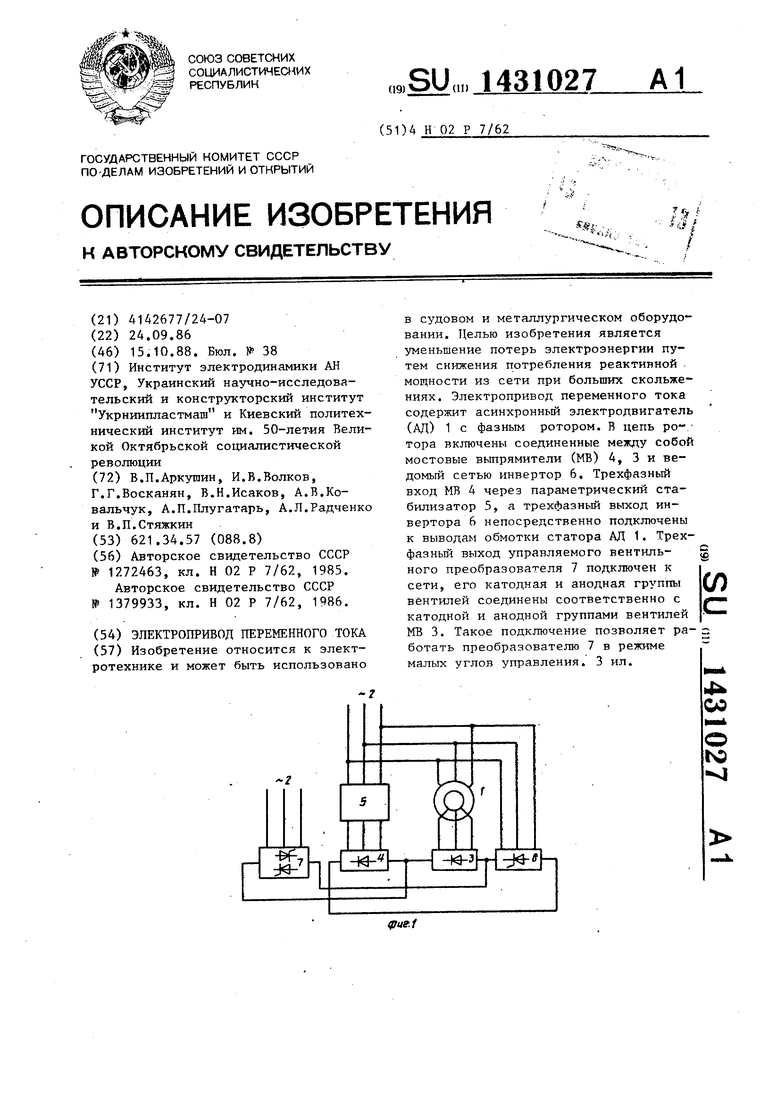
Qpw - ij)u,,
- UCJN- - °s Pp
в котором Upu - максимальное напряжение на регулируемом преобразователе 7,
/Ьр- угол управления преобразователем 7.
Текущее значение Напряжения на входе регулируемого преобразователя 7 определяется выражением
(2)
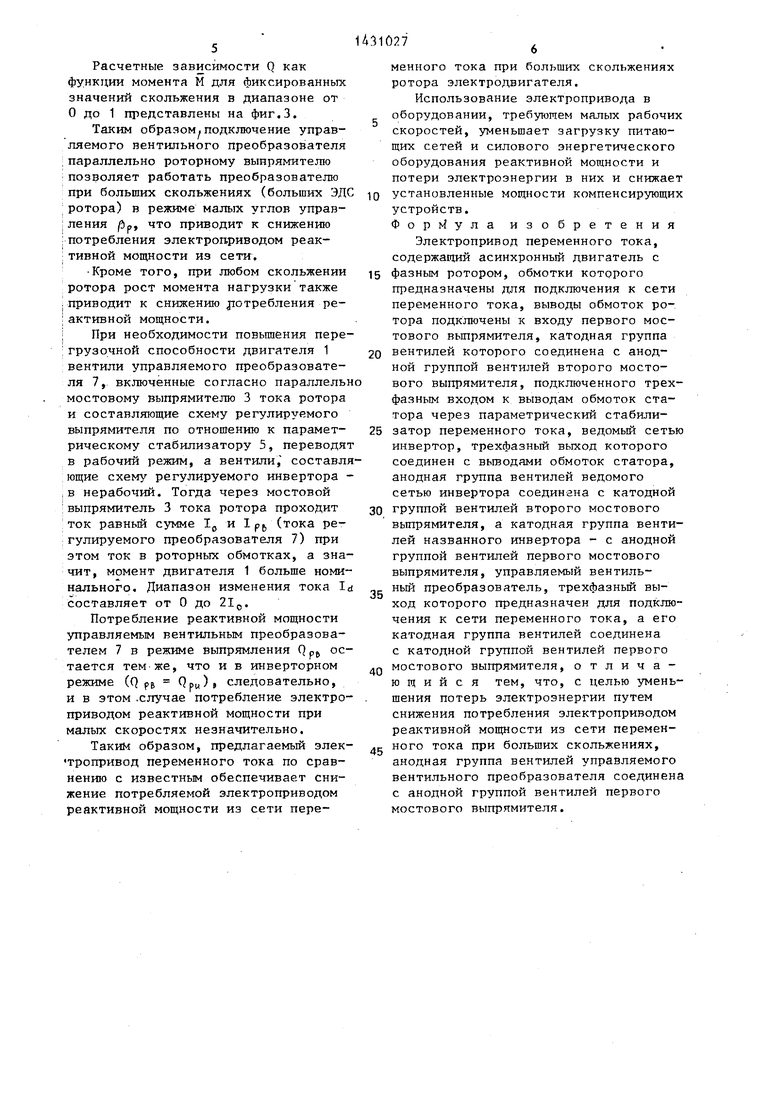
Q (1 - М) Vl - S .
(7)
Из вьфажения (7) следует, что электропривод при номинальной нагрузке (М 1) при любой скорости (скольжении) реактивной мощности из сети не потребляет, т.е. Q (М 1, S var) 0. При S 1 электропривод при любой нагрузке не потребляет реактивной мощности Q (М var, S 1) 0.
Расчетные зависимости Q как функции момента М для фиксированных значений скольжения в диапазоне от О до 1 представлены на фиг.З.
Таким образом.подключение управляемого вентильного преобразователя ;параллельно роторному выпрямителю : позволяет работать преобразователю при больших скольжениях (больших ЭДС ;ротора) в режиме малых углов управ- iЛенин р, что приводит к снижению потребления электроприводом реак- ;тивной мощности из сети.
Кроме того, при любом скольжении ротора рост момента нагрузки также -приводит к снижению тотребления ре- I активной мощности.
I При необходимости повышения пере- ;грузочной способности двигателя 1 вентили управляемого преобразователя 7, включенные согласно параллельн мостовому выпрямителю 3 тока ротора и составляющие схему регулируемого выпрямителя по отношению к параметрическому стабилизатору 5, переводят в рабочий режим, а вентили, составляющие схему регулируемого инвертора - |В нерабочий. Тогда через мостовой ;выпрямитель 3 тока ротора проходит : ток равный сумме 1р и Ipj, (тока регулируемого преобразователя 7) при этом ток в роторных обмотках, а значит, момент двигателя 1 больще номинального. Диапазон изменения тока Id составляет от О до 21 р.
Потребление реактивной мощности управляемым вентильным преобразователем 7 в режиме выпрямления Q р остается тем же, что и в инверторном режиме (Q PR Qpu следовательно, и в этом .случае потребление электроприводом реактивной мощности при малых скоростях незначительно.
Таким образом, предлагаемый элек- тропривод переменного тока по сравнению с известным обеспечивает снижение потребляемой электроприводом реактивной мощности из сети пере
менного тока при больших скольжениях ротора электродвигателя.
Использование электропривода в оборудовании, требующем малых рабочих скоростей, уменьшает загрузку питающих сетей и силового энергетического оборудования реактивной мощности и потери электроэнергии в них и снижает установленные мощности компенсирующих устройств. изобретения
Электропривод переменного тока, содержащий асинхронный двигатель с
5 фазным ротором, обмотки которого
предназначены для подключения к сети переменного тока, выводы обмоток ротора подключены к входу первого мостового выпрямителя, катодная группа
0 вентилей которого соединена с анодной группой вентилей второго мостового выпрямителя, подключенного трехфазным входом к выводам обмоток статора через параметрический стабили5 затор переменного тока, ведомый сетью инвертор, трехфазный вьпсод которого соединен с выводами обмоток статора, анодная группа вентилей ведомого сетью инвертора соединена с катодной группой вентилей второго мостового выпрямителя, а катодная группа вентилей названного инвертора - с анодной группой вентилей первого мостового выпрямителя, управляемый вентильный преобразователь, трехфазный выход которого предназначен для подключения к сети переменного тока, а его катодная группа вентилей соединена с катодной группой вентилей первого мостового выпрямителя, отличающийся тем, что, с целью уменьшения потерь электроэнергии путем снижения потребления электроприводом реактивной мощности из сети переменного тока при больших скольжениях, анодная группа вентилей управляемого вентильного преобразователя соединена с анодной группой вентилей первого мостового выпрямителя.
0
5
0
5
puf,2
0.2 O.t4- 0,6 О.в fffue-S
f
| Электропривод переменного тока | 1985 |
|
SU1272463A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод переменного тока | 1986 |
|
SU1379933A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
