Изобретение относится к области компрессоростроения и эксплуатации турбокомпрессоров, в частности к области противопомпажного регулирования и защиты.
Известны способы противопомпажного регулирования турбокомпрессоров (Авторское свидетельство СССР №985450, 30.12.82 г., Бюл. №48, F 04 D 27/02, патент РФ №1466394, 10.06.97 г., Бюл. №16/97, F 04 D 27/02, Шабашов С.З. и др. Регулирование газотурбинных агрегатов.- Л.: Недра, 1983 г., патенты РФ №2187711, F 04 D 27/02, опубл. 20.08.02 г. и №2172433, F 04 D 27/02, опубл. 20.08.01 г.) путем формирования сигнала при помпажном или предпомпажном состоянии компрессора и использования полученного сигнала в открытом алгоритме полного открытия противопомпажного клапана компрессора, остающегося открытым вплоть до вмешательства обслуживающего персонала. Способ обеспечивает защиту компрессора от помпажа, но в результате открытия клапана рабочая точка компрессора перемещается бесконтрольно и оказывается в области устойчивых режимов на значительном удалении от границы помпажа, компрессор перестает работать на потребителя.
Известны также способы противопомпажного регулирования турбокомпрессоров ("Опыт эксплуатации систем противопомпажного регулирования и защиты газоперекачивающих агрегатов компрессорных станций", ВНИИЭГазпром, Обзорная информация, Серия "Транспорт и хранение газа", вып.10, М., 1986 г.; "Автоматизация процессов газовой промышленности", Под общ. ред. А.З.Шайхутдинова и др., СПб., Наука, 2003 г., Авторское свидетельство СССР №1201555, опубл. 30.12.85 г., Бюл.№4, патенты РФ №2220328, F 04 D 27/02, опубл. 27.12.03 г. и №2168071, F 04 D 27/02, опубл.27.05.01 г.), в которых управляющее воздействие, подаваемое на привод противопомпажного клапана, формируют в замкнутом контуре регулирования по пропорциональному закону (П-закону) или по пропорционально-интегральному закону (ПИ-закону) в зависимости от отклонения рабочей точки компрессора от линии регулирования, сдвинутой на величину зоны безопасности от границы помпажа в область устойчивых режимов. При отклонении рабочей точки от линии регулирования в направлении границы помпажа управляющее воздействие открывает клапан, а при отклонении в противоположном направлении - закрывает его.
Чем больше величина зоны безопасности и чем больше величина коэффициента усиления пропорциональной части замкнутого контура регулирования, тем эффективнее замкнутый контур регулирования может противостоять возмущениям, могущим привести к помпажу компрессора.
Однако увеличение величины зоны безопасности отрицательно сказывается на экономичности компрессора из-за того, что открытие противопомпажного клапана происходит в области заведомо устойчивых режимов, а работа компрессора с открытым противопомпажным клапаном ухудшает его экономические показатели. В практике противопомпажного регулирования величину зоны безопасности выбирают обычно равной 5...12% регулируемой величины в точке номинального режима компрессора. Увеличение коэффициента усиления ограничивается достижением границы устойчивости процесса регулирования.
Стремление максимально уменьшить зону безопасности с одной стороны и необходимость ограничения коэффициента усиления пропорциональной части требованием обеспечения устойчивости процесса регулирования с другой стороны приводят к тому, что описанный замкнутый контур регулирования оказывается не в состоянии противостоять достаточно быстрым и мощным возмущениям по расходу через компрессор, которые возможны в процессе эксплуатации. В результате известные способы оказываются недостаточно эффективными и компрессор, несмотря на действие системы регулирования, может оказаться в помпаже.
Известен также ближайший по технической сущности и достигаемой эффективности к заявляемому и выбранный в качестве прототипа способ противопомпажного регулирования турбокомпрессоров, используемый фирмой "Compressor Controls Corporation", США (способ описан в проспекте фирмы "Регулирование, улучшающее надежность и эффективность турбомашин", США, 1992 г., а также в книге "Автоматизация процессов газовой промышленности". Под общ. ред. А.З.Шайхутдинова и др., СПб., Наука, 2003 г.), в котором сочетаются замкнутый контур регулирования и открытый алгоритм управления.
Согласно способу-прототипу в замкнутом контуре регулирования, содержащем пропорциональную и интегральную части, осуществляют стабилизацию комплекса параметров, характеризующих положение рабочей точки компрессора в принятой системе координат, на уровне задания, определяемого линией регулирования, сдвинутой на заданную величину зоны безопасности от границы помпажа в область устойчивых режимов компрессора, формированием управляющего воздействия на положение противопомпажного клапана. В данном способе противопомпажного регулирования турбокомпрессора, как и в способе, который заявляется, для реализации замкнутого контура регулирования измеряют текущие значения параметров, характеризующих положение рабочей точки компрессора в принятой системе координат. Вычисляют по измеренным параметрам текущее значение регулируемого параметра. Вычисляют текущее значение задания регулятора, соответствующее линии регулирования, сдвинутой на заданную величину зоны безопасности от границы помпажа в область устойчивых режимов. Вычисляют текущее рассогласование регулятора в виде разности значений регулируемого параметра и задания. Формируют по ПИ-закону управляющее воздействие и подают управляющее воздействие на вход привода противопомпажного клапана. При этом в способе-прототипе, как и во всех других известных способах противопомпажного регулирования, выявленных из уровня техники, формирование управляющего воздействия производят симметрично: при одинаковых коэффициентах усиления пропорциональной части как в сторону открытия противопомпажного клапана, так и в сторону его закрытия.
Возможность замкнутого контура регулирования способа-прототипа противостоять мощным возмущениям, как и способа-аналога, оказывается ограниченной из-за стремления уменьшить зону безопасности и необходимости ограничения коэффициента усиления пропорциональной части.
Для компенсации возмущений, с которыми не в состоянии справиться замкнутый контур регулирования, при опасном приближении рабочей точки к границе помпажа в способе-прототипе применяют алгоритм открытого управления противопомпажным клапаном, который обеспечивает быстрое заданное или поступенчатое открытие клапана. Во время действия алгоритма открытого управления обратную связь по положению рабочей точки отключают, рабочая точка перемещается бесконтрольно, что является недостатком способа-прототипа, так как отрицательно сказывается на точности регулирования. Положение усугубляется тем, что для быстрого и надежного предотвращения помпажа открытие клапана задают таким, чтобы в результате действия алгоритма открытого управления рабочая точка гарантированно оказалась в зоне устойчивых режимов на значительном удалении от границы помпажа и от линии регулирования. То есть клапан намеренно открывают в большей степени, чем это требуется для предотвращения помпажа, что ухудшает экономические показатели этого способа.
Задача, решаемая изобретением, состоит в увеличении способности замкнутого контура регулирования противостоять опасным возмущениям, могущим привести к помпажу и, тем самым, к исключению применения алгоритма открытого управления клапаном. Решение указанной задачи позволяет достичь технического результата, заключающегося в увеличении точности, экономичности и эффективности противопомпажного регулирования.
Для решения поставленной задачи в известном способе противопомпажного регулирования, включающем стабилизацию комплекса параметров, характеризующего положение рабочей точки компрессора в принятой системе координат, на уровне задания, определяемого линией регулирования, сдвинутой на заданную величину зоны безопасности от границы помпажа в область устойчивых режимов компрессора, формированием управляющего воздействия на положение противопомпажного клапана замкнутым контуром регулирования, содержащим пропорциональную и интегральную части, определяют направление отклонения рабочей точки от линии регулирования и в зависимости от направления отклонения рабочей точки от линии регулирования формирование управляющего воздействия осуществляют при одном из двух разных значений коэффициента усиления пропорциональной части контура регулирования. При отклонении рабочей точки от линии регулирования в направлении устойчивых режимов (то есть при положительном текущем рассогласовании) формирование управляющего воздействия осуществляют при меньшем значении коэффициента усиления, определяемом при настройке конкретной системы из условия обеспечения апериодичности процесса возврата рабочей точки на линию регулирования. При отклонении рабочей точки в направлении границы помпажа (то есть при отрицательном текущем рассогласовании) формирование управляющего воздействия осуществляют при большем значении коэффициента усиления, определяемом при настройке системы из условия обеспечения максимально достижимого быстродействия контура регулирования при сохранении устойчивости процесса регулирования. При этом меньшее значение коэффициента усиления может составлять примерно 75% от коэффициента усиления, при котором формируют управляющее воздействие по способу-прототипу, а большее значение коэффициента усиления может примерно в 10 раз превосходить коэффициент усиления пропорциональной части контура регулирования, применяемого в известном способе.
В заявляемом способе, в отличие от известных способов, процесс открытия-закрытия клапана осуществляется асимметрично: открытие клапана происходит ускоренно, обеспечивая предотвращение помпажа в условиях действия интенсивных возмущений, а закрытие - замедленно, апериодически, монотонно, обеспечивая устойчивость переходного процесса.
Указанные существенные признаки, характеризующие сущность заявляемого технического решения, не известны в подобной совокупности и взаимосвязи в настоящее время для способов противопомпажного регулирования турбокомпрессоров. Аналог, характеризующийся идентичностью всем существенным признакам изобретения, в ходе проведения патентных исследований не обнаружен. Это позволяет сделать вывод о соответствии заявляемого технического решения критерию "Новизна".
Существенные признаки не могут быть представлены как комбинация, выявленная из известных решений с реализацией в виде отличительных признаков для достижения технического результата. Из этого следует вывод о соответствии заявляемого технического решения критерию "Изобретательский уровень".
Сущность заявляемого способа поясняется следующими чертежами:
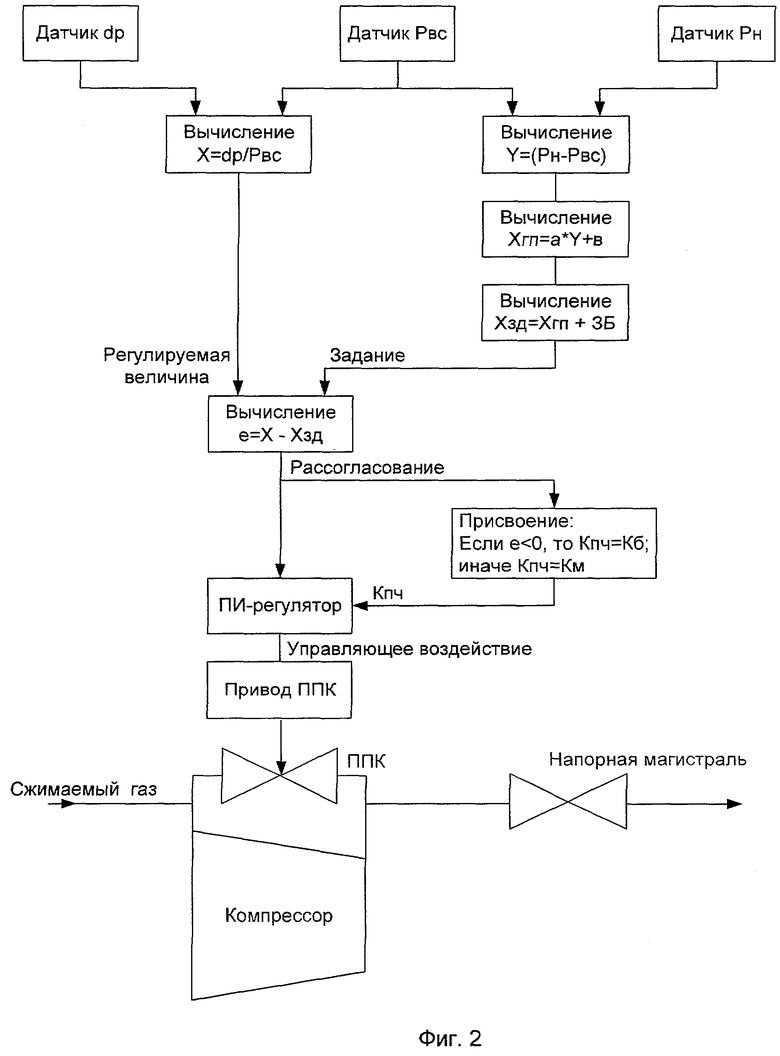
фиг.1 - взаимное расположение рабочей точки компрессора, границы помпажа и линии регулирования на поле характеристик компрессора.
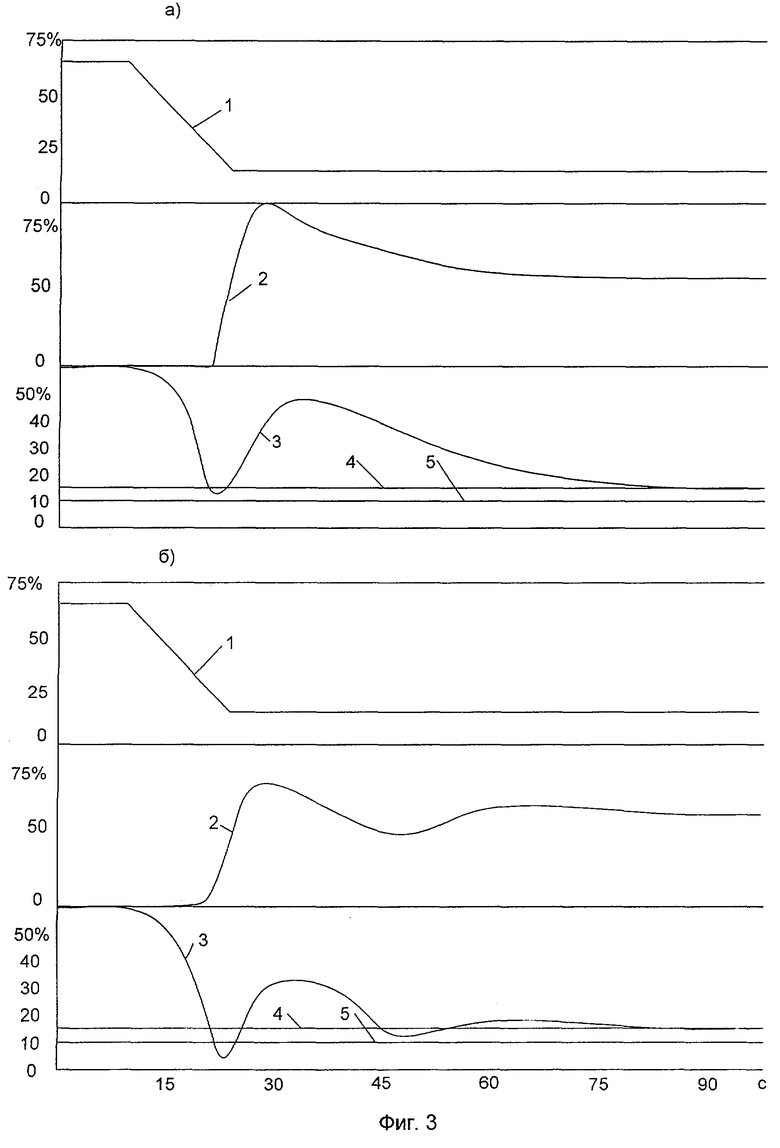
фиг.2 - пример осуществления заявляемого способа противопомпажного регулирования турбокомпрессора - блок-схема алгоритма, предназначенного для реализации заявляемого способа.
фиг.3 - осциллограммы переходных процессов, подтверждающие решение задачи и достижение технического результата изобретения.
На фиг.1 взаимное расположение рабочей точки компрессора, границы помпажа и линии регулирования на поле характеристик компрессора изображены в условных координатах X-Y, где X, Y представляют собой выбранные комплексы параметров. Для целей противопомпажного регулирования могут использоваться различные системы координат. Критерием выбора служит независимость рассогласования регулятора (разности регулируемого параметра и задания) от параметров газа на входе в компрессор. Параметр Х обычно характеризует расход газа через компрессор, а параметр Y - приращение энергии газа в компрессоре. Широко применяется система координат, в которой осью ординат (Y) является политропический напор компрессора, который для компрессоров с маленькой (меньше двух) степенью сжатия может быть заменен разностью давлений нагнетания и всасывания, а осью абсцисс (X) - частное от деления перепада давления на сопротивлении во входном патрубке компрессора на давление всасывания.
Сущность заявляемого способа заключается в том, что измеряют текущие значения параметров, характеризующих положение рабочей точки компрессора в принятой системе координат. Вычисляют по измеренным параметрам текущее значение регулируемого параметра. Вычисляют текущее значение задания регулятора, соответствующее линии регулирования, сдвинутой на заданную величину зоны безопасности от границы помпажа в область устойчивых режимов. Вычисляют текущее рассогласование регулятора в виде разности значений регулируемого параметра и задания. Формируют по ПИ-закону управляющее воздействие и подают управляющее воздействие на вход привода противопомпажного клапана. Формирование управляющего воздействия производят асимметрично: при разных значениях коэффициента усиления пропорциональной части замкнутого контура регулирования в зависимости от знака текущего рассогласования. При положительном текущем рассогласовании (перемещении рабочей точки в направлении устойчивых режимов) управляющее воздействие формируют при меньшем значении коэффициента усиления, обеспечивающем медленное закрытие клапана, сопровождающееся плавным апериодическим возвратом рабочей точки на линию регулирования. При отрицательном текущем рассогласовании (перемещении рабочей точки в направлении границы помпажа) управляющее воздействие формируют при максимально большом значении коэффициента усиления, не приводящем, однако, к нарушению устойчивости процесса регулирования.
Заявляемый способ может быть осуществлен на базе программно-технических средств. В качестве программно-технических средств может быть использован любой промышленный контроллер со временем цикла счета не более 50 мс. Требование к быстродействию контроллера определяется малыми временами процессов, характерных для помпажа компрессоров. При помощи контроллера реализуют алгоритм функционирования противопомпажного регулятора, описание которого приведено ниже. Кроме контроллера для осуществления противопомпажного регулятора используют датчики физических параметров, сигналы которых являются входными сигналами контроллера. Выходной сигнал контроллера используют для управления приводом противопомпажного клапана.
В противопомпажный регулятор закладывается положение границы помпажа, получаемое обычно экспериментально при помпажном тестировании, и величина зоны безопасности, которая определяет смещение линии регулирования от границы помпажа в область устойчивых режимов. Как отмечалось выше, обычно указанное смещение составляет 5...12% значения регулируемой величины в точке номинального режима.
В процессе работы в противопомпажном регуляторе производится измерение текущих значений параметров, применяя датчики физических параметров и по показаниям датчиков осуществляется расчет параметров Х и Y. По параметру Y вычисляется текущее задание Хзд. Определяется текущее рассогласование регулятора (е) в виде разности текущего значения параметра Х и текущего задания Хзд.
При нахождении рабочей точки компрессора на линии регулирования (Х=Хзд) рассогласование регулятора равно нулю. Равно нулю и управляющее воздействие, формируемое пропорциональной и интегральной частями замкнутого контура регулирования. Перепускной противопомпажный клапан сохраняет свое положение неизменным.
При перемещении рабочей точки в направлении области устойчивых режимов в соответствии с величиной рассогласования формируется управляющее воздействие, представляющее собой сумму управляющих воздействий пропорциональной и интегральной частей замкнутого контура регулирования и направленное на закрытие клапана. При этом управляющее воздействие формируется при меньшем значении коэффициента усиления пропорциональной части. Клапан закрывается, возвращая рабочую точку на линию регулирования.
При перемещении рабочей точки в направлении границы помпажа аналогичным образом производится открытие клапана, приводящее к возврату рабочей точки на линию регулирования. При этом управляющее воздействие формируется при большем значении коэффициента усиления пропорциональной части.
В приведенной на фиг.2 блок-схеме алгоритма, предназначенного для реализации предлагаемого способа и являющегося примером осуществления заявляемого способа противопомпажного регулирования турбокомпрессора, используются три датчика: давления нагнетания (Рн), давления всасывания (Рвс) и перепада давления на входном патрубке компрессора (dp). Сигналы датчиков (Рвс) и (dp) подают на блок вычисления текущего значения регулируемого параметра X, который в данном примере вычисляют как частное от деления перепада давления на входном патрубке компрессора на давление всасывания (dp/Рвс). Сигналы датчиков (Рн) и (Рвс) подают на блок вычисления текущего значения параметра Y, который вычисляют как разность давлений нагнетания и всасывания (Рн-Рвс).
На практике граница помпажа определяется экспериментально при проведении помпажного тестирования и в общем случае может быть задана математически кривой произвольной формы, однако на практике обычно используется ее кусочно-линейная аппроксимация с количеством линейных участков от одного до трех (фиг.1). В рассматриваемом примере для простоты принято, что граница помпажа представляет собой прямую линию с угловым коэффициентом (а) и смещенную из начала координат на величину (в).
Текущее значение параметра Y подают на блок вычисления абсциссы точки, находящейся на границе помпажа и имеющей ординату Y: (Хгп=a·Y+в), а затем на блок вычисления абсциссы соответствующей ей точки, находящейся на линии регулирования: (Хзд=Хгп+ЗБ), где ЗБ - зона безопасности - заданное смещение линии регулирования от границы помпажа в направлении устойчивых режимов и составляющее в описываемом примере 7% величины Х в точке номинального режима. Величина Хзд является текущим заданием для ПИ-регулятора.
Текущие значения регулируемого параметра Х и задания Хзд подают на блок вычисления текущего рассогласования, которое вычисляют как е=Х-Хзд.
Отличительной особенностью описываемого алгоритма противопомпажного регулирования является то, что перед подачей текущего рассогласования (е) на вход блока ПИ-регулятора его подают на вход логического блока, в котором производится определение знака рассогласования и в зависимости от знака рассогласования коэффициенту усиления пропорциональной части (Кпч) ПИ-регулятора присваивают одно из двух заранее заданных значений, при которых в регуляторе производится формирование управляющего воздействия. При отрицательном рассогласовании (е<0) коэффициенту усиления присваивают большее значение (Кпч=Кб), в противном случае - меньшее значение (Кпч=Км). Выбранное значение Кпч подают к блоку регулятора в виде его текущей настройки.
В блоке ПИ-регулятора по ПИ-закону вырабатывается управляющее воздействие, являющееся функцией величины рассогласования (е) и значения коэффициента усиления пропорциональной части (Кпч). Управляющее воздействие подают на вход привода противопомпажного клапана (ППК), который осуществляет перемещение противопомпажного клапана таким образом, чтобы уменьшить текущее рассогласование регулятора - возвратить рабочую точку на линию регулирования.
Описанный алгоритм прошел стадию лабораторных исследований на модели.
На фиг.3 приведены осциллограммы переходных процессов, полученные при проведении двух опытов. На осциллограммах: кривая 1 - перемещение крана в напорной магистрали компрессора (0% - кран закрыт, 100% - кран открыт), кривая 2 - ход противопомпажного клапана (0% - клапан закрыт, 100% - клапан открыт), кривая 3 - регулируемый параметр, кривая 4 - линия регулирования, кривая 5 - граница помпажа.
На осциллограмме а) приведен переходный процесс согласно заявляемому способу противопомпажного регулирования, формирование управляющего воздействие на положение клапана, в котором осуществлялось при двух разных значениях коэффициента усиления пропорциональной части контура регулирования: при положительном рассогласовании регулятор работал с коэффициентом усиления Кпч=5, а при отрицательном рассогласовании - с коэффициентом усиления Кпч=75.
На осциллограмме б) для сравнения приведен переходный процесс в соответствии со способом-прототипом, в котором формирование управляющего воздействия на положение клапана осуществлялось при постоянном коэффициенте усиления пропорциональной части контура регулирования Кпч=7,5.
В исходном состоянии рабочая точка компрессора находится в зоне устойчивых режимов далеко от линии регулирования и границы помпажа. Противопомпажный клапан полностью закрыт. Возмущение в систему вносится частичным закрытием крана в напорной магистрали, что приводит к уменьшению расхода газа в ней и через компрессор. В соответствии с уменьшением расхода газа через компрессор рабочая точка смещается в сторону границы помпажа. При пересечении точкой линии регулирования и появлении отрицательного рассогласования регулятор начинает формировать управляющий сигнал, направленный на открытие противопомпажного клапана.
В первом случае (осциллограмма а) - заявляемый способ) нанесенное возмущение приводит к интенсивному открытию противопомпажного клапана, которое обеспечивает энергичный возврат рабочей точки в зону устойчивых режимов. Рабочая точка не успевает достичь границы помпажа. Последующее медленное прикрытие клапана обеспечивает апериодический, монотонный возврат рабочей точки на линию регулирования. В конце переходного процесса клапан остается в состоянии частичного открытия, соответствующего положению рабочей точки на линии регулирования.
Во втором случае (осциллограмма б) - способ-прототип) открытие противопомпажного клапана происходит менее интенсивно, клапан открывается на меньшую величину, чем в первом случае. В конце переходного процесса клапан занимает положение, соответствующее положению рабочей точки на линии регулирования. Рабочая точка, несмотря на происходящее открытие клапана, успевает отклониться от линии регулирования на величину, превышающую зону безопасности, и пересечь границу помпажа. Своей основной задачи, заключающейся в предотвращении помпажа, замкнутый контур регулирования способа-прототипа в данном случае не выполняет. Для компенсации возмущений, подобных нанесенному в рассматриваемом опыте, в способе-прототипе вынужденно прибегают к использованию открытого алгоритма управления противопомпажным клапаном, что, как отмечалось выше, экономически нецелесообразно.
Таким образом, приведенные осциллограммы свидетельствуют о том, что осуществление противопомпажного регулирования в соответствии с заявляемым способом приводит к увеличению способности замкнутого контура регулирования противостоять опасным возмущениям, могущим привести к помпажу, а следовательно, повысить точность и экономичность регулирования, его эффективность, и, тем самым, подтверждают достижение технического результата.
Заявляемое техническое решение представляет собой разработанный с целью обеспечения технического результата перечень конкретных действий, осуществляемых в определенной последовательности в зависимости от определенных условий. Указанная последовательность действий достаточно подробно описана в приведенном описании, содержащем пример технической реализации заявляемого способа в виде блок-схемы алгоритма, подтверждающего возможность осуществления предлагаемого технического решения. Описанный алгоритм реализован с использованием программно-технических средств и испытан на модели. Изложенное позволяет сделать вывод о соответствии изобретения критерию "Промышленная применимость".
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОТИВОПОМПАЖНОГО РЕГУЛИРОВАНИЯ И ЗАЩИТЫ ТУРБОКОМПРЕССОРА | 2004 |
|
RU2263232C1 |
| СПОСОБ ПРОТИВОПОМПАЖНОГО РЕГУЛИРОВАНИЯ ТУРБОКОМПРЕССОРА | 2004 |
|
RU2263233C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ОТ РАБОЧЕЙ ТОЧКИ ТУРБОКОМПРЕССОРА ДО ГРАНИЦЫ ПОМПАЖА | 2006 |
|
RU2311564C1 |
| Способ защиты турбокомпрессора от помпажа | 1983 |
|
SU1201555A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ ПОМПАЖА ПРИ ПЕРЕВОДЕ ТУРБОКОМПРЕССОРА ИЗ ПАРАЛЛЕЛЬНОГО СОЕДИНЕНИЯ В АВТОНОМНЫЙ РЕЖИМ РАБОТЫ | 1998 |
|
RU2194884C2 |
| СПОСОБ ЗАЩИТЫ КОМПРЕССОРА ОТ ПОМПАЖА | 2010 |
|
RU2434162C9 |
| Система противопомпажного управления компрессорной установкой | 1991 |
|
SU1776886A1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ОТ РАБОЧЕЙ ТОЧКИ ТУРБОКОМПРЕССОРА ДО ГРАНИЦЫ ПОМПАЖА ТУРБОКОМПРЕССОРА (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РАБОЧЕЙ ТОЧКИ ТУРБОКОМПРЕССОРА ОТНОСИТЕЛЬНО ГРАНИЦЫ ПОМПАЖА ТУРБОКОМПРЕССОРА (ВАРИАНТЫ) | 1995 |
|
RU2168071C2 |
| Устройство для защиты компрессора от помпажа | 1990 |
|
SU1816899A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКИХ ПАРАМЕТРОВ ЭНЕРГОУСТАНОВКИ | 2007 |
|
RU2341690C1 |
Способ противопомпажного регулирования турбокомпрессора относится к области компрессоростроения и эксплуатации турбокомпрессоров, в частности к области противопомпажного регулирования и защиты. Сущность изобретения заключается в том, что стабилизируют комплекс параметров, характеризующий положение рабочей точки компрессора в принятой системе координат, на уровне задания, определяемого линией регулирования, сдвинутой на заданную величину зоны безопасности от границы помпажа в область устойчивых режимов компрессора, формированием управляющего воздействия на положение противопомпажного клапана замкнутым контуром регулирования, содержащим пропорциональную и интегральную части, определяют направление отклонения рабочей точки от линии регулирования и в зависимости от направления отклонения формирование управляющего воздействия осуществляют при одном из двух разных значений коэффициента усиления пропорциональной части контура регулирования. Технический результат заключается в увеличении точности, экономичности и эффективности противопомпажного регулирования.1 з.п. ф-лы, 3 ил.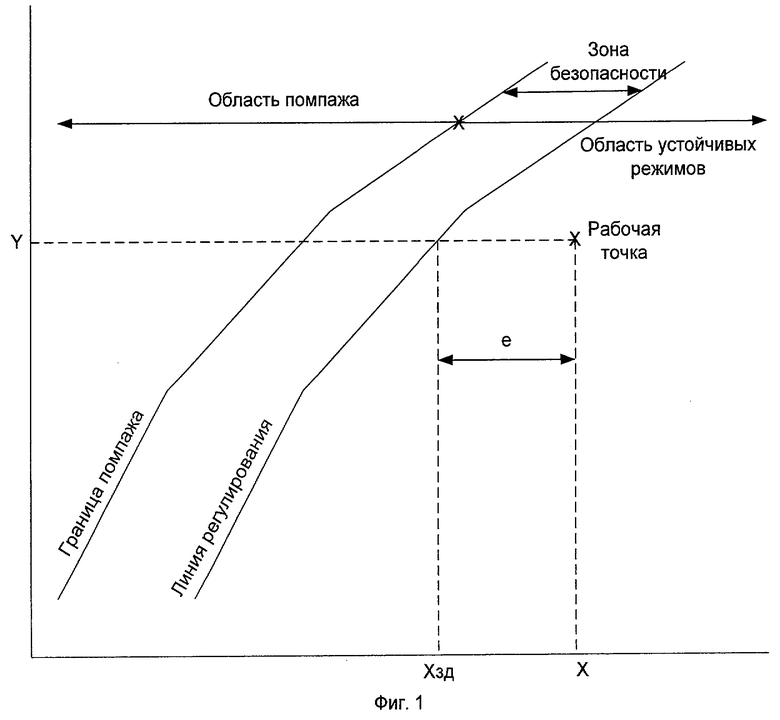
| Автоматизация процессов газовой промышленности, под общ.ред | |||
| ШАЙХУТДИНОВА А.З | |||
| и др., Санкт-Петербург, Наука, 2003, с.379-381.RU 2168071 C2, 27.05.2001.RU 2220328 C1, 27.12.2003.RU 2187711 C1, 20.08.2002.RU 2172433 C1, 20.08.2001.EP 0500195 A2, 26.08.1992.DE 4202226 A1, 08.04.1993. |

