Данное изобретение относится к мобильному роботу, в частности к мобильному роботу, предназначенному для уборки.
Скопление частиц пыли на поверхностях, особенно на полах, представляет собой общую проблему в жилых помещениях, офисных помещениях, лабораториях и тому подобное. Подобные скопления пыли достаточно неприятны и, во многих случаях, также представляют собой угрозу для здоровья многих больных астмой. Поэтому полы необходимо регулярно мыть или чистить пылесосом. В большинстве случаев уборку проводят вручную.
Цель данного изобретения заключается в обеспечении решения для автоматического удаления пыли, причем изобретение предусматривает создание мобильного робота, способного проводить подобную работу. Данное решение проблемы не заменит полностью ручную уборку, но будет дополнением к ней и тем самым уменьшит необходимость в ручной уборке.
Таким образом, целью данного изобретения является создание мобильного робота, который во время заданного периода работы сможет удалить значительную часть частиц пыли, которую можно обнаружить на поверхности пола, например, в офисном помещении.
Современная технология позволяет создавать сложные мобильные роботы, в которых программными средствами могут регулироваться перемещения робота, позволяя ему совершать движение по заданной траектории перемещения.
Например, в патенте США №5440216 описан робот, который способен автоматически передвигаться к станции для зарядки своих аккумуляторов. В патенте США №5787545 также описан мобильный робот для вакуумной уборки.
Однако оба приведенных решения проблемы достаточно сложны и в обоих случаях используются вычислительные процессоры для управления перемещением робота.
Целью же данного изобретения является создание очень простого робота. Он должен быть простым по внешнему виду и конструкции и производство его должно быть настолько дешево, чтобы каждый человек мог бы рассматривать его в качестве недорогого дополнения к обычному оборудованию для уборки. А это не является возможным при решениях, которые описаны в известном уровне техники.
Кроме того, целью данного изобретения является создание робота, который не будет содержать сложные системы управления, и, поэтому, отсутствует необходимость в использовании вычислительных процессоров для управления перемещением робота.
В двух указанных выше решениях привод сам является постоянно встроенным в крышку. Однако целью данного изобретения является достижение "случайного направления перемещения", и наилучшим способом это достигается, если на "выбор направления перемещения" будет влиять множество различных факторов. Один из путей достижения этого заключается в том, что робот подвергается воздействию множества "ударных моментов", то есть создаются ситуации, в которых робот или приводной механизм сталкивается с другим объектом, инициирующим изменение направления.
За счет размещения привода в крышке таким образом, что он не прикреплен к крышке, а может быть свободно перемещен по отношению к ней в пределах области, ограниченной крышкой, количество точек воздействия или моментов воздействия существенно возрастает, так как изменение направления движения инициируется также приводным механизмом, ударяющим по внутренней поверхности крышки.
Насколько нам известно, в известном уровне техники отсутствует описание подобных систем и, следовательно, в данном изобретении предлагается новый робот с возможностью перемещения, который может быть использован для множества различных применений. Так как целью опытных работ с роботом была разработка робота для уборки, то примеры, которые приведены ниже, обращены к подобным вариантам выполнения, но следует подчеркнуть, что данное изобретение включает робот как таковой, и изобретение не ограничивается роботами, которые могут быть использованы только для уборки.
Таким образом, основной особенностью данного изобретения является именно то, что приводной механизм, который вызывает перемещение робота, не прикрепляется к самой крышке.
Предпочтительным вариантом выполнения привода в соответствии с данным изобретением является шаровой элемент, внутри которого расположен приводной механизм, вызывающий вращение шарового элемента.
Таким образом, данное изобретение отличается тем, что оно содержит привод и крышку, причем привод находится в контакте с поверхностью, расположен внутри крышки и свободен по отношению к ней, а крышка, которая по меньшей мере частично окружает привод, в части, обращенной к поверхности, имеет протяженность, превышающую протяженность привода, вследствие чего между крышкой и приводом создается пространство, так что привод свободно наталкивается на крышку и случайным образом передвигает ее по поверхности.
Более подробно варианты выполнения изобретения описаны в зависимых пунктах 2-13 формулы изобретения.
Предпочтительный вариант выполнения робота представляет собой робот для уборки, предназначенный для удаления пыли с поверхности, в котором по меньшей мере одна протирочная салфетка, находящаяся в контакте с поверхностью, которая должна быть очищена, прикреплена к крышке с возможностью удаления.
Ниже данное изобретение описано более подробно со ссылкой на прилагаемые чертежи, на которых:
фиг.1 на сегменте разреза показывает, как привод, в данном варианте выполнения шаровой элемент, расположен внутри крышки, выполненной в виде полусферы,
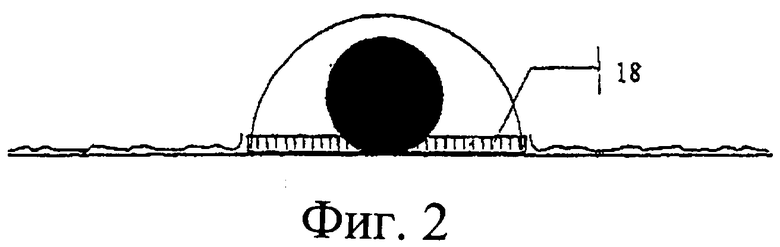
фиг.2 изображает протирочную салфетку, прикрепленную к крышке робота,
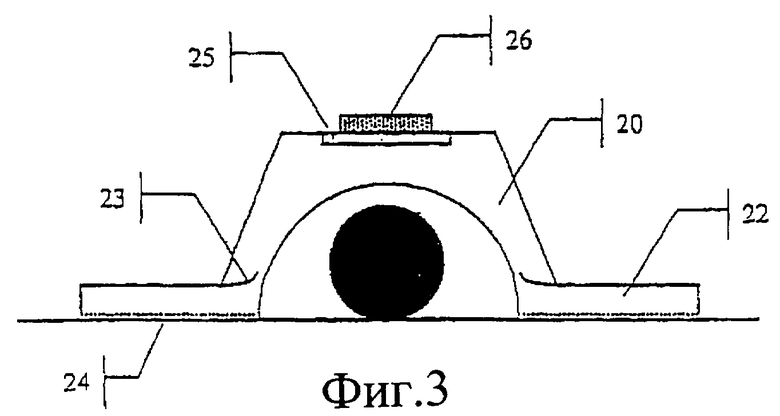
фиг.3 показывает, как блок вакуумного всасывания прикреплен к крышке робота,
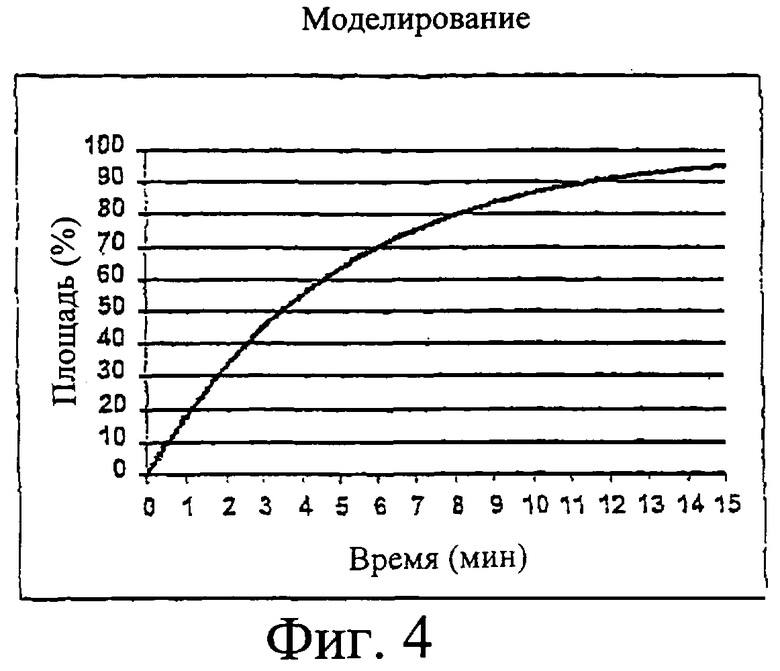
фиг.4 изображает результат моделирования времени, необходимого для обработки заданной площади,
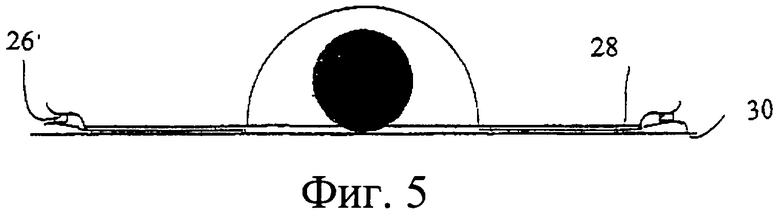
фиг.5 изображает альтернативный вариант выполнения крышки и крепления к ней протирочной салфетки,
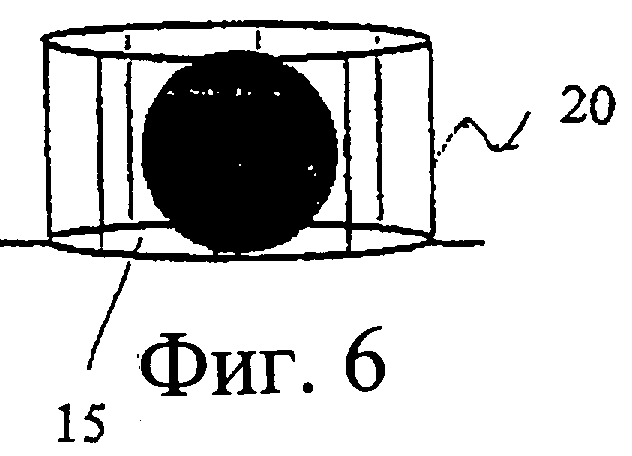
фиг.6 изображает альтернативный вариант выполнения крышки.
Ниже изложена основная концепция данного изобретения со ссылкой на фиг.1. Подвижный робот 10 получен путем расположения привода 12 внутри крышки 14 и помещен на поверхность 16, например на пол 16. В показанном варианте выполнения привод состоит из шарового элемента 12 с наружным сферическим каркасом и находящимся внутри приводным механизмом. Использование шарового элемента в качестве привода для робота составляет предпочтительный вариант выполнения, но следует подчеркнуть, что также могут быть использованы другие приводы, например, приводы, в которых используются колеса. Основная концепция заключается в том, что привод не прикрепляется к крышке.
Приводной механизм (на чертежах не показан), который используется внутри шарового элемента, может быть любого типа, и таким образом, изобретение не включает приводной механизм как таковой. Например, могут быть использованы приводные механизмы для шаровых элементов, описанные в патентных публикациях WO 99/30876, WO 97/25239 и патентах США №№4733737, 4726800, 4541814 и 4501569. Приводной механизм имеет электронные схемы управления для запуска и остановки приводного механизма и источник питания, например аккумуляторы. Предпочтительный приводной механизм для шарового элемента включает груз, положение которого может быть изменено посредством приводного механизма, причем груз совершает перемещение по внутренней поверхности каркаса шарового элемента таким образом, что центр тяжести шарового элемента меняет свое положение, вызывая тем самым перемещение шарового элемента. Таким образом, принцип действия привода основан на создании вращающего момента.
Следует подчеркнуть, что создание недорогого мобильного робота является целью данного изобретения, и направления перемещения робота являются, следовательно, неуправляемыми, то есть не используются искусственные нейронные сети, или "схемы нечеткой логики" или логические схемы управления с памятью.
Крышка 14, которая в предпочтительном варианте выполнения выполнена в виде полусферы, имеет в части, обращенной к полу, как изображено на фиг.1, диаметр несколько больший, чем диаметр шарового элемента 12. Высота крышки 14 предпочтительно должна быть также несколько больше, чем диаметр шарового элемента 12. Таким образом, создается пространство 15 между крышкой 14 и шаровым элементом 12. Шаровой элемент 12 будет перемещаться внутри этого пространства 15, и взаимодействие шарового элемента и крышки заставит робот 10 двигаться, когда шаровой элемент 12 наталкивается на крышку 14. При ударе робота 10 об объект, например ножку кресла или часть стены, управление отходом робота 10 будет строиться на бесконечном числе случайных поисков. Это означает, что при столкновении робота 10 с объектом направление движения изменяется "случайно". Совокупность динамики движения шарового элемента 12 и его соударений со стенками также определяется пространством 15, т.е. соударения между приводом и крышкой заставляют шаровой элемент перемещаться по произвольной траектории, не зависящей от объектов, с которыми соударяется робот 10. Испытания, проведенные с прототипом, показали, что робот 10 обладает хорошей способностью "освобождаться" от физических препятствий, находящихся на полу.
Форма шарового элемента 10 вызывает его перемещение по полу с малым трением. Шаровой элемент может быть выполнен из любого материала, но материал, образующий наружную поверхность шарового элемента 10, должен обладать достаточным трением о пол для того, чтобы вращение шарового элемента 10 приводило к его перемещению по полу.
Крышка 14 может быть выполнена любыми способами. Решение, описанное выше со ссылкой на фиг.1, представляет собой только одну альтернативу. В данном решении шаровой элемент целиком окружен крышкой. Другие типичные варианты выполнения крышки раскрыты ниже.
Другой аспект изобретения относится к роботу для уборки. Основной концепцией здесь является возможность крепления протирочных средств к крышке. При испытаниях такого "робота для уборки" было показано, что при использовании электростатических салфеток пыль и грязь эффективно удаляются с пола, подвергающегося уборке.
Для создания робота для уборки необходимо, чтобы существовала возможность прикрепления протирочных средств к крышке.
Так, на фиг.2 показана крышка, в нижней части которой выполнена система типа velcro для закрепления протирочной салфетки.
Альтернативные варианты выполнения крышки изображены на фиг.5 и 6. На фиг.6 крышка не имеет форму полусферы, которая окружает шаровой элемент целиком, а представляет собой каркас 20, который задает границы области перемещения 15 для шарового элемента. Данный каркас имеет высоту, достаточную для соударений его с шаровым элементом, чтобы осуществлялось перемещение каркаса.
Кроме того, в варианте выполнения, изображенном на фиг.5, крышка в части, обращенной к полу, имеет секцию 28, радиально выступающую наружу для создания поверхности, на которой может быть закреплена протирочная салфетка 30.
Наиболее предпочтительным вариантом выполнения изобретения является сочетание особенностей, показанных на фиг.5 и 6, то есть крышка представляет собой просто каркас, но с выступающей наружу секцией 28 для закрепления протирочной салфетки 30.
Протирочная салфетка может быть, например, прикреплена к крышке посредством системы типа velcro 26 (в большинстве случаев является достаточным, чтобы система типа velcro была прикреплена к крышке, так как сам протирочный материал часто прикрепляют к системе типа Velcro). В данном решении предполагается, что протирочная салфетка 30 лежит зажатая между секцией 28 крышки 12 и полом 16, то есть салфетка находится снизу самой крышки 12. Следовательно, отверстие в протирочной салфетке выполнено таким образом, что приводное устройство находится в контакте с полом.
Секция 28 может иметь форму круга, но также возможны и другие варианты выполнения. Например, в настоящее время испытывается квадратная секция 28 с квадратной протирочной салфеткой 30 для того, чтобы понять, будет ли подобная уборка более эффективна вдоль стен и в углах. Кроме того, следует заметить, что нет необходимости в том, чтобы размеры салфетки 30 повторяли форму секции 28. В предпочтительном варианте выполнения салфетка выступает за пределы секции 28 так, что наиболее выступающая часть салфетки имеет большую гибкость (так как он не находится в контакте с секцией 28), чтобы она могла заходить на небольшое расстояние вверх на смежные поверхности (например, стены).
В другом альтернативном варианте выполнения саму протирочную салфетку располагают на крышке. Данный вариант выполнения на чертежах не показан.
Если на крышке 14 должно быть закреплено оборудование со значительным удельным весом относительно крышки, например пылесос, то крышка может быть оборудована шаровыми элементами/колесами (на чертежах не показаны), направленными вниз к полу для снижения трения между крышкой и полом.
Как было отмечено ранее, траектория перемещения робота 10 определяется столкновениями, которые возникают между роботом и объектами в комнате (ножки кресла, стены и тому подобное), а также соударениями, возникающими между приводом и внутренней поверхностью крышки. Следовательно, робот может за заданное время перемещаться по полу по "произвольной/случайной" траектории. Можно провести вычисления, в которых будут приняты во внимание такие параметры, как площадь и форма пола, мебель (ножки кресла и ножки стола, другое офисное оборудование и ему подобное), площадь и протяженность устройств для уборки, скорость робота и т. д.), для того чтобы оценить размер части пола, которая будет обработана в течение заданного времени. Например, можно подсчитать, что 95% пола будут обработаны по меньшей мере один раз при перемещении робота в течение 2 часов.
Поскольку не предполагается полная замена обычной уборки уборкой роботом, то значение, например, 95% вполне будет достаточно в большинстве случаев. Можно допустить, что робот работает в одном офисе пару часов каждый день после того, как персонал закончит свой рабочий день (см. пример 1, приведенный ниже).
В качестве протирочных средств могут быть использованы, например, пылеуловители. Предпочтительным является использование электростатически заряжаемых пылеуловителей, которые доступны на рынке. Они притягивают частицы пыли при продвижении по поверхностям пола. Как было отмечено выше, форму таких пылеуловителей приспосабливают для конкретного применения вместе с роботом для уборки, т.е. возможно оснащение их системой типа velcro, приспособленной для робота, оснащенным системой типа velcro, причем они должны быть снабжены отверстием для позиционирования крышки и/или привода.
Роботы для уборки такого типа, который показан на фиг.2, могут иметь любой размер, но для разработанного прототипа шаровой элемент имеет диаметр 10 см, а крышка в части, обращенной к полу, имеет диаметр около 20 см.
На фиг.3 изображен вариант выполнения, в котором оборудованием для уборки является блок вакуумного всасывания. В изображенном на чертеже варианте выполнения сама крышка выполнена в виде блока вакуумного всасывания, следовательно, привод толкает блок вакуумного всасывания по поверхности пола. С другой стороны, предпочтительным является, чтобы робот для уборки был очень простым, и для осуществления вакуумного всасывания в принципе будет достаточно двух камер 20 и 22, в которых установленный вентилятор 26 создает пониженное давление, за счет которого воздух всасывается в камеру 20 через однопутевой пневмораспределитель 23 в виде ряда отверстий 24, обращенных вниз к поверхности пола. Прежде чем выйти из камеры 20 воздух фильтруется, проходя через фильтр 25.
В альтернативном варианте блок вакуумного всасывания прикрепляют к такой крышке, которая показана на фиг.2 или фиг.6.
Поскольку примеры реализации изобретения даны со ссылкой на его применение в качестве робота для уборки, т.е. оснащенного либо пылеуловителем, либо пылесосом, то следует подчеркнуть, что основная концепция изобретения состоит в установке привода с приводным механизмом в крышке таким образом, что вместе они вызывают перемещение по полу. Таким образом, данное изобретение не ограничивается роботами, осуществляющими уборку, но роботы для уборки, подобные изображенным на чертежах, являются наиболее предпочтительными вариантами выполнения данного изобретения.
Пример 1 - моделирование.
Результаты моделирования, осуществленного на основе теоретической модели, изображены на фиг.4.
Аобщ: Общая площадь (см2)
Кшир: Ширина салфетки (см)
Кск: Скорость перемещения салфетки (см/с)
A(i): Покрываемая площадь (см2); i - индекс, который ежесекундно корректируется

При каждой корректировке (т.е. ежесекундно) происходит добавление новой площади, Кшир×Кск, которая уточняется коэффициентом, уменьшающимся по мере покрытия площади. Например, при значениях параметров: Аобщ=5 м×6 м=30 м2 (300000 см2), Кшир=20 см и Кск=50 см/с, понадобятся 11,5 мин для того, чтобы покрыть 90% площади. На фиг.4 показана взаимосвязь процентов площади, покрываемой электростатическим пылеуловителем, и времени работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНОЕ УСТРОЙСТВО ДЛЯ УБОРКИ | 2022 |
|
RU2788502C1 |
| АВТОМАТИЧЕСКАЯ МАШИНА ДЛЯ УБОРКИ | 2017 |
|
RU2695047C2 |
| РОБОТ-ПЫЛЕСОС | 2003 |
|
RU2264159C2 |
| РОБОТ-ПЫЛЕСОС С ФУНКЦИЕЙ WI-FI | 2023 |
|
RU2831101C1 |
| САМОХОДНАЯ ЧИСТЯЩАЯ МАШИНА | 2023 |
|
RU2830479C1 |
| АВТОНОМНОЕ УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ | 2012 |
|
RU2601931C2 |
| АВТОНОМНЫЙ ПЫЛЕСОС | 2012 |
|
RU2586197C2 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ПОЛОВ | 2015 |
|
RU2655197C1 |
| УСТРОЙСТВО ДЛЯ БЛОКИРОВКИ ЭЛЕМЕНТА ДВЕРИ В ПРОЕМЕ, ВЕДУЩЕМ В ОГРАНИЧЕННОЕ ПРОСТРАНСТВО | 2000 |
|
RU2257452C2 |
| РОБОТ-ПЫЛЕСОС | 2015 |
|
RU2665457C1 |
Мобильный робот может быть использован для уборки поверхностей, полов в жилых и офисных помещениях, лабораториях и др., при простоте конструкции обеспечивает увеличенную степень хаотичности перемещения и тем самым более равномерное "покрытие" заданного участка пространства за счет максимальной свободы выбора направления перемещения и позволяет снизить стоимость его изготовления. Робот содержит привод, находящийся в контакте с очищаемой поверхностью. Привод расположен внутри крышки и свободен по отношению к ней. Крышка по меньшей мере частично окружает привод в части, обращенной к очищаемой поверхности, и имеет протяженность, превышающую протяженность привода, вследствие чего между крышкой и приводом создается пространство, так что привод свободно наталкивается на крышку и случайным образом перемещает ее по поверхности. Крышка выполнена в виде тела полусферической формы или в виде каркаса. Привод выполнен в виде шарового элемента с внутренним приводным механизмом. 12 з.п. ф-лы, 6 ил.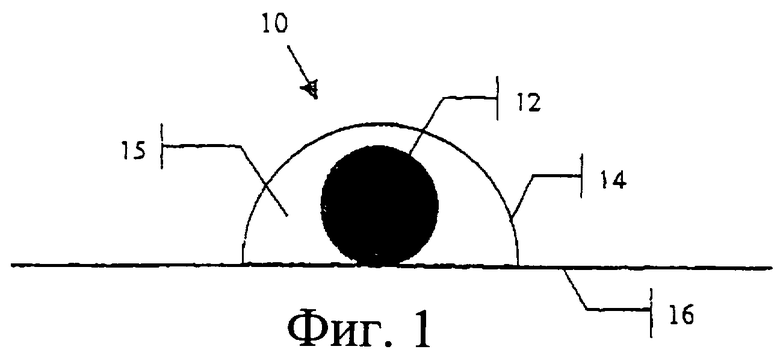
| US 5787545 А, 06.10.1998 | |||
| Игрушка | 1986 |
|
SU1442242A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ И КООРДИНАТ ПОДВОДНОГО ОБЪЕКТА | 1993 |
|
RU2038615C1 |
| US 5815880 А, 06.10.1998 | |||
| 0 |
|
SU380517A1 | |

