Изобретение относится к вычислительной технике, в частности к системам автоматизации управления технологическими процессами крупных промышленных объектов, и может быть использовано при создании систем управления ответственными объектами с требуемой степенью резервирования и производительностью.
Сложный объект автоматизации является, как правило, совокупностью технологических подсистем, которые, в свою очередь, состоят из более мелких технологических функциональных узлов. Разбиение объекта на функциональные узлы основано на выделении отдельной технологической задачи либо нескольких тесно связанных задач в единый узел, вследствие чего каждый функциональный узел достаточно автономен. Интенсивность его взаимодействия с остальной системой на порядки ниже, чем внутри него.
Для крупных объектов автоматизации вышедшая из строя функция должна быть восстановлена без влияния на остальную функциональную часть системы, т.е. восстановление должно осуществляться в режиме "горячей" замены за минимальное время.
Контроллеры с традиционной архитектурой на базе параллельной шины с централизованной обработкой даже с очень мощным процессором не удовлетворяют предъявляемым требованиям в полной мере.
Например, известны устройства, созданные на основе магистрально-модульных систем, таких как VME (http://www.vita.com/) /I/, VM162/VM172, "VMEbus Single-Board Computer with Manual, Order Nr. 16596, User's Manual, Issue 1, Dual Industry Pack Support" /2/.
VME - одна из немногих систем, в которой возможна мультипроцессорность и, соответственно, распределенная обработка и управление, но сложность и стоимость мультипроцессорной системы высока. Состав контроллера, включая процессор, ввод/вывод, источники питания, схемы резервирования, сетевые интерфейсы, размеры крейта и многое другое является проектно-компонуемым.
Существенным недостатком VME можно считать наличие "критических" элементов отказа в контроллере:
- сама VME шина, отказ которой приводит к полному отказу контроллера, а дублирование параллельной шины является либо невозможным, либо невероятно дорогостоящим и не предусмотренным стандартом;
- арбитр шины VME централизованный, и в стандарте не предусматривается его дублирование, соответственно его отказ приведет к отказу всего контроллера.
В рамках некоторых монолитных "частнофирменных" ПТК "Teleperm ME" существуют специализированные контроллеры. В них возможно резервирование "критические" элементов отказов, например шины, но путем добавления 2-го крейта, связанного с основным сложной схемой шинных шлюзов. Реализована "горячая" замена модулей, распределенная обработка, аппаратная и программная независимость. "Siemens Prozebleitsystem Teleperm ME fur Kraftwerke. Automatisierungssysteme. Katalog LT 110-1992" /3/.
К недостаткам данного устройства можно отнести то, что применение этих контроллеров невозможно для создания собственных ПТК путем системной интеграции. Кроме того, они обладают некоторыми техническими недостатками:
- Несмотря на более высокоуровневый метод передачи данных внутри контроллеров, оперирующий такими понятиями, как "сообщения", "события", "телеграммы", и то, что коммуникационные шины внутри этих контроллеров очень напоминают детерминированную локальную сеть, они не являются такой сетью в полной мере и обладают рядом типичных недостатков параллельных шин, кроме этого, эти шины не являются стандартными и открытыми.
- Функции ввода/вывода жестко фиксированы в рамках каждого отдельного модуля. Это приводит к широкой номенклатуре модулей, большой избыточности и не оптимальности компоновки сигналов ввода/вывода.
- Номенклатура модулей определяется типами подключаемых к ним сигналов, что приводит к тому, что в один модуль подключаются сигналы из разных функциональных узлов, но имеющие один тип сигнала, например измерение тока 4-20 мА, что приводит к излишним перекрестным информационным потокам внутри контроллера.
- Отсутствует автоконфигурирование - требуется сравнительно длительное время по восстановлению программ после замены модуля;
- Очень сложное изготовление шкафов контроллеров и не технологичное, трудоемкое подключение сигналов ввода/вывода.
- Наличие шкафов промклеммников и согласующих реле.
- Закрытая, неизвестная архитектура контроллеров.
Наиболее близкой к предлагаемому по техническим признакам является VME система, построенная на базе процессорных модулей VSBC-32 - 32-х разрядный одноплатный процессорный модуль с VME шиной фирмы Kontron, Германия. "VSBC-32, Combined VMEbus System Controller and Serial Communications Controller Board Manual ID 21168, Rev. Index 04 Jul 00" /4/.
Процессорный модуль включает в себя процессор, блок памяти, блок логического управления, интерфейс последовательной связи RS232C, интерфейс локальной сети (Ethernet), субмодули ввода-вывода, интерфейс системной шины VME, объединенные внутренней шиной. Для согласования электрических параметров (напряжения, ток) и других факторов (сечение жил кабеля, схемы подключения) управляющих сигналов объекта к процессорному модулю могут быть подключены блоки полевых интерфейсов, что исключает шкафы промклеммников и согласующих реле.
Система предполагает создание многопроцессорного контроллера путем объединения нескольких процессорных модулей посредством параллельной шины VME, причем один выделенный (первый) процессорный модуль должен дополнительно выполнять функцию арбитра системной шины. Обмен информацией между модулями происходит по параллельной шине на уровне чтения-записи ячеек памяти. Доступ к шине предоставляет арбитр шины по запросу процессорного модуля. Адресное пространство системной шины едино и ограничено разрядностью шины. Адреса распределяются между модулями, входящими в состав контроллера. Определение источника или приемника данных происходит внутри модулей.
Недостатками данного устройства являются:
- неустойчивость к одиночным ошибкам при приеме-передаче по параллельной шине,
- централизованная обработка входных и выходных данных, снижение производительности при увеличении числа каналов,
- централизованный арбитраж доступа к шине,
- зависимость приоритета доступа от расположения модуля в крейте,
- рост нагрузки на шину с увеличением количества каналов ввода/вывода,
- отсутствие механизма "горячей замены".
Задача изобретения - создание целевого многопроцессорного контроллера, устойчивого к любому единичному отказу, с возможностью дублирования целевых функций и элементов с любой степенью резервирования, с возможностью любой проектной компоновки функций ввода-вывода, с возможностью "горячей" замены отказавших элементов.
Поставленная задача решена за счет того, что в известном многопроцессорном контроллере, включающем процессорные модули, состоящие из соединенных внутренней шиной процессора, снабженного интерфейсом последовательной связи RS232C и интерфейсом локальной сети, блока памяти, блока логического управления, субмодулей ввода-вывода, полевых интерфейсов, процессорные модули объединены дублированной детерминированной локальной сетью нижнего уровня в кластеры посредством первой и второй последовательных системных шин, причем каждый процессорный модуль имеет возможность сопряжения с локальной сетью верхнего уровня через интерфейс локальной сети и дополнительно содержит блок формирования географического адреса, связанный с блоком логического управления, первый и второй интерфейсы последовательной системной шины, соединенные соответственно с первой и второй последовательными системными шинами и внутренней шиной.
Предлагаемый многопроцессорный контроллер с последовательными системными шинами для межмодульного взаимодействия вместо традиционной параллельной шины наилучшим образом отвечает всем требованиям автоматизации технологических процессов крупных неоднородных объектов.
Используемая в контроллере локальная сеть (вместо параллельной шины) обладает следующими свойствами:
- Передача сигнала происходит по одной паре проводов, причем способ передачи сигнала дифференцированный, что повышает устойчивость помехам. Одна пара проводов позволяет легко ее дублировать.
- Арбитраж доступа к шине децентрализованный и реализован на аппаратно-логическом уровне.
- Каждый процессорный модуль, получивший право доступа к системной шине, имеет ограниченное время на передачу по сети.
- Передача информации по сети производится на уровне пакетов. Заголовок пакета содержит идентификатор, поле арбитража и контрольную сумму. Заканчивается пакет полем подтверждения. Процессорный модуль, принявший пакет, обязан подтвердить получение пакета. Если источник пакета не получает подтверждения получения, то производится повторная передача этого самого пакета.
- Предусмотрен механизм широковещательной передачи пакетов, при котором все модули одновременно получают одинаковую информацию.
Дублирование последовательной системной шины повышает надежность контроллера до уровня, который не достижим в традиционных контроллерах. Сообщения, переданные по одной шине, дублируются по второй. Предлагаемый контроллер не может отказать при любом единичном отказе среды передачи контроллера.
Схема географического адреса позволяет процессорному модулю автоматически определять свое положение в контроллере и свое функциональное назначение.
Предлагаемый многопроцессорный контроллер обеспечивает отказоустойчивость, "горячую" замену модулей без отключения питания контроллера и остановки производственного процесса, автоконфигурорование модулей при замене, использование стандартных и недорогих составляющих.
Описание контроллера
Описание контроллера поясняется чертежом, где приведена структурная схема многопроцессорного контроллера с дублированной последовательной системной шиной.
На чертеже введены обозначения:
1 - процессор
2 - блок памяти
3 - блок логического управления
4 - интерфейс последовательной связи (RS232C)
5 - интерфейс локальной сети верхнего уровня (Ethernet)
6 - интерфейс последовательной системной шины
7 - субмодуль ввода-вывода
8 - внутренняя шина
9 - процессорный модуль
10 - блок интерфейса измерения и управления объектом
11 - блок формирования географического адреса
12 - первая последовательная системная шина
13 - вторая последовательная системная шина
14 - многопроцессорный контроллер
15 - объект управления
16 - локальная сеть верхнего уровня
Многопроцессорный контроллер 14 состоит из процессорных модулей 9, объединенных в локальную сеть нижнего уровня первой 12 и второй 13 последовательными системными шинами.
Процессорный модуль 9 включает: процессорный блок 1, соединенный с внутренней шиной 8, к процессорному блоку подключены интерфейс последовательной связи 4 (RS232C) и интерфейс локальной сети верхнего уровня 5 (Ethernet), который связан с локальной сетью верхнею уровня 16. Процессорный блок 1 связан через внутреннюю шину 8 с блоком логического управления 3, к которому подсоединен блок формирования географического адреса 11. Блок памяти 2 соединен с внутренней шиной 8, к которой подсоединены также субмодули ввода-вывода 7, соединенные с блоками интерфейса измерения и управления объектом 10, связанные с объектом управления 15. Первый и второй интерфейсы последовательной системной шины блоки 6 соединены с первой 12 и второй 13 последовательными системными шинами и с внутренней шиной 8. Любой процессорный модуль 9 может выполнять роль сетевого шлюза.
Работа контроллера.
Предложенный контроллер предназначен для работы в составе программно-технического комплекса (ПТК), который состоит из верхнего и нижнего уровня. Верхний уровень представляет собой средства визуализации процесса, фиксации событий и базу данных, неоперативный контур управления, инструментальные средства диагностики и отладки ПО. Нижний уровень выполняет функции оперативного управления, сбора информации о состоянии объекта, преобразования ее и передачи на верхний уровень, а также получения команд и параметров, необходимых для оперативного управления объектом. Контроллер играет центральную роль в нижнем уровне ПТК. Верхний уровень связан с нижним посредством локальной сети Ethernet (16).
Контроллер функционирует следующим образом. При инициализации системы в каждом процессорном модуле 9 производится загрузка операционной системы из энерго-независимой памяти (входящей в состав блока 2), считывание процессором 1 кода позиции в крейте из блока формирования географического адреса 11 через блок логического управления 3. После этого загружается соответствующая прикладная задача либо из энергонезависимой памяти, либо, используя инструментальные средства разработки ПО (программного обеспечения), через интерфейс последовательной связи RS232C - блок 4, или через интерфейс локальной сети - блок 5, или через системную шину - блоки 6, 12 или 13 используя другой процессорный модуль 9, если он выполняет роль сетевого шлюза, для связи с источником прикладной задачи, расположенным на верхнем уровне. Каждый процессорный модуль 9, выполняя свою часть общей задачи, производит сбор информации с объекта. Информация с объекта 15 поступает через блок интерфейса измерения и управления объектом 10 на субмодуль ввода-вывода - блок 7. Там происходит преобразование входного сигнала в цифровой вид. Информация в цифровом виде считывается процессором 1 из входного блока 7 и записывается в оперативную память блока 2. Далее поступившая информация обрабатывается процессором 1 в соответствии с алгоритмом прикладной задачи. В результате обработки информации процессор 1 вычисляет величины управляющих сигналов, значения которых записываются в выходной субмодуль ввода-вывода - блок 7. В выходном блоке 7 происходит преобразование цифрового кода в сигналы соответствующего вида (ток, напряжение, импульсы определенной длительности и др.) и через соответствующий блок интерфейса измерения и управления 10 передается на объект управления 15.
Весь обмен информацией, передача команд и управляющих сигналов внутри процессорного модуля 9 происходит по внутренней шине - блок 8. Для получения информации о значениях параметров, необходимых для функционирования собственных алгоритмов управления, а также получения задания на выполнение определенной подзадачи и передачи рапортов и отчетов на верхний уровень - блок 16 - служат последовательные системные шины - блоки 12 и 13, организованные в виде дублированной детерминированной локальной сети нижнего уровня. Сеть реализована на основе протокола CAN.
В конкретной реализации многопроцессорный контроллер 14 был выполнен в виде крейта распространенного механического стандарта "Евромеханика", на задней стенке которого смонтирована объединительная панель с разъемами, в которые по направляющим устанавливаются процессорные модули 9.
Процессорные модули 9 внутри контроллера 14 объединены дублированной детерминированной локальной сетью CAN-bus - сеть нижнего уровня. Взаимодействие процессорных модулей осуществляется по дублированной шине CAN-bus.
Основная часть функций сопряжения контроллера с "полевым" уровнем (датчики преобразователи, исполнительные механизмы и пр.) решена в субмодулях ModPak (блок 7). В них реализуются функции аналого-цифрового преобразования, фильтрации, цифро-аналогового преобразования и т.п.
Остальная часть задач сопряжения, таких как подключение "полевых" кабельных связей, согласование с конкретными измерительными схемами, дополнительные преобразования решается в блоках интерфейса измерения и управления объектом 10.
Детерминированная локальная сеть нижнего уровня реализована на основе протокола CAN (Controller Area Network) "CAN Specification. Version 2.0, Robert Bosch GmbH. 1991 Device Net Specification. Release 2.0, 1997, Vol.1: Communication Model and Protocol, Vol.2: Device Profiles and Object Library CAN-based Higher Layer Protocols and Profiles. K. Etschberger" /5/.
CAN (Controller Area Network) - это последовательный протокол связи с эффективной поддержкой распределения контроля в реальном времени и очень высоким уровнем безопасности. Основное назначение организация передачи информации в сложных условиях, таких как среды с высоким уровнем различного рода помех.
Таким образом, предлагаемый контроллер имеет следующие важные свойства:
отсутствие критических элементов отказа, высокий " коэффициент готовности", обеспеченный механизмом автоматической инициализации модуля на основе "географической" адресации в контроллере, "горячая" замена элементов без отключения питания и без влияния на функционирование остальной части контроллера, многопроцессорность и распределенная обработка и управление, возможность создания структур с любой глубиной резервирования, автономность любого процессорного модуля, повышенная живучесть системы и надежность программного обеспечения.
Источники информации
1. http://www.vita.com/.
2. VM162/VM172. VMEbus Single-Board Computer with Manual, Order Nr. 16596, User's Manual, Issue 1, Dual IndnstryPack Support.
3. Siemens Prozebleitsystem Teleperm ME fur Kraftwerke. Automatisierungssysteme. Katalog LT 110-1992.
4. VSBC-32. Combined VMEbus System Controller and Serial Communications Controller Board Manual ID 21168, Rev. Index 04 Jul 00.
5. CAN Specification. Version 2.0, Robert Bosch GmbH, 1991 Device Net Specification. Release 2.0, 1997, Vol.1: Communication Model and Protocol, Vol.2: Device Profiles and Object Library CAN-based Higher Layer Protocols and Profiles, K. Etschberger.
6. Патент №2139566, МКИ G 06 F 15/16 от 10.10.99.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЮЩИЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2009 |
|
RU2419123C1 |
| ПЛАТФОРМА ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ БОЕВЫХ КОМПЛЕКСОВ | 2014 |
|
RU2595507C2 |
| Система автоматического управления электрогидравлической системы регулирования | 2021 |
|
RU2759419C1 |
| Промышленный программируемый контроллер | 2019 |
|
RU2749103C1 |
| ПРОГРАММИРУЕМЫЙ ЛОГИЧЕСКИЙ КОНТРОЛЛЕР | 1995 |
|
RU2101757C1 |
| Высокопроизводительная вычислительная платформа на базе процессоров с разнородной архитектурой | 2016 |
|
RU2635896C1 |
| РЕЗЕРВИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ НА ОСНОВЕ ПРОГРАММИРУЕМЫХ КОНТРОЛЛЕРОВ | 2019 |
|
RU2745946C1 |
| КОМПЛЕКС ПРОГРАММНО-АППАРАТНЫХ СРЕДСТВ АВТОМАТИЗАЦИИ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ | 2004 |
|
RU2279117C2 |
| Сложно-функциональный блок для СБИС типа система на кристалле | 2018 |
|
RU2691886C1 |
| КОМПЛЕКС ПРОГРАММНО-АППАРАТНЫХ СРЕДСТВ АВТОМАТИЗАЦИИ КОНТРОЛЯ И УПРАВЛЕНИЯ | 2007 |
|
RU2349949C2 |
Изобретение относится к вычислительной технике, в частности к системам автоматизации управления технологическими процессами крупных промышленных объектов. Техническим результатом является создание целевого многопроцессорного контроллера, устойчивого к любому единичному отказу, с возможностью дублирования целевых функций и элементов с любой степенью резервирования, с возможностью любой проектной компоновки функций ввода-вывода, с возможностью "горячей" замены отказавших элементов. Для этого контроллер содержит блок формирования географического адреса, интерфейсы последовательной системной шины, процессорные модули, состоящие из соединенных внутренней шиной процессора, блока памяти, блока логического управления, субмодулей ввода-вывода, интерфейсов измерения и управления объектом, при этом процессорные модули объединены дублированной детерминированной локальной сетью нижнего уровня в кластеры. 1 ил.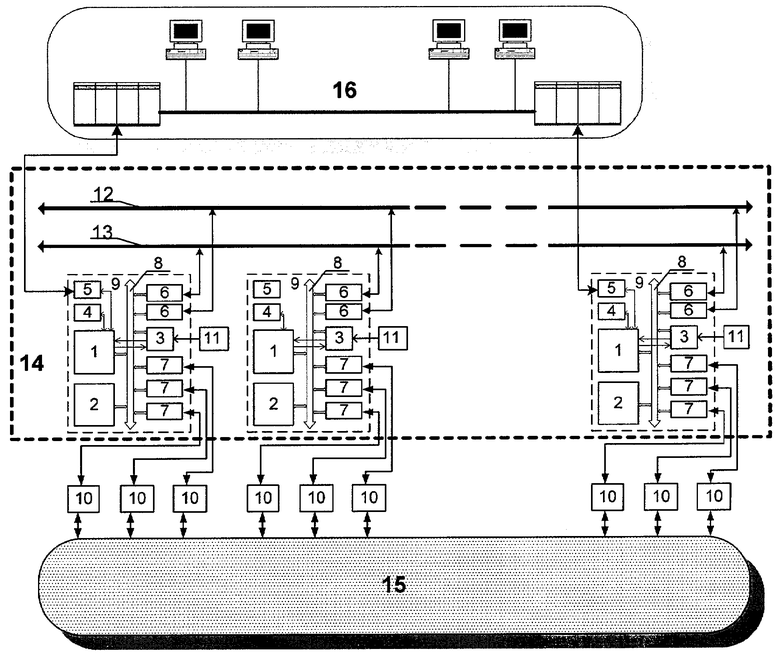
Многопроцессорный контроллер для управления сложным технологическим объектом, включающий процессорные модули, состоящие из соединенных внутренней шиной процессора, снабженного интерфейсом последовательной связи и интерфейсом локальной сети, блока памяти, блока логического управления, субмодулей ввода-вывода, интерфейса измерения и управления объектом, отличающийся тем, что процессорные модули объединены дублированной детерминированной локальной сетью нижнего уровня в кластеры посредством первой и второй последовательных системных шин, причем каждый процессорный модуль имеет возможность сопряжения с локальной сетью верхнего уровня через интерфейс локальной сети и дополнительно содержит блок формирования географического адреса, связанный с блоком логического управления, первый и второй интерфейсы последовательной системной шины, соединенные соответственно с первой и второй последовательными системными шинами и внутренней шиной.
| US 4509117 A, 02.04.1985.RU 2076352 C1, 27.03.1997.RU 2103744 C1, 27.01.1998.RU 2207631 C1, 27.06.2003.EP 0822473 A2, 04.02.1998.EP 0992867 A1, 12.04.2000. |

