Изобретение относится к вычислительной технике, в частности к системам автоматизации управления технологическими процессами крупных промышленных объектов, например таких, как системы железнодорожной автоматики, телемеханики и связи, и может быть использовано на локомотивах, моторвагонных подвижных составах с целью повышения безопасности и регулирования движения поездов, а также в системах интервального регулирования с использованием радиоканала.
Сложный объект автоматизации является, как правило, совокупностью технологических подсистем, которые, в свою очередь, состоят из более мелких технологических функциональных узлов. Разбиение объекта на функциональные узлы основано на выделении отдельной технологической задачи либо нескольких тесно связанных задач в единый узел, вследствие чего каждый функциональный узел достаточно автономен. Интенсивность его взаимодействия с остальной системой на порядки ниже, чем внутри него.
Для крупных объектов автоматизации вышедшая из строя функция должна быть восстановлена без влияния на остальную функциональную часть системы, т.е. восстановление должно осуществляться в режиме "горячей" замены за минимальное время.
Контроллеры с традиционной архитектурой на базе параллельной шины с централизованной обработкой даже с очень мощным процессором не удовлетворяют предъявляемым требованиям в полной мере.
Известна VME система, построенная на базе процессорных модулей VSBC-32 - 32-х разрядный одноплатный процессорный модуль с VME шиной фирмы Kontron, Германия. "VSBC-32, Combined VMEbus System Controller and Serial Communications Controller Board Manual ID 21168, Rev. Index 04 Jul 00" /4/].
Процессорный модуль включает в себя процессор, блок памяти, блок логического управления, интерфейс последовательной связи RS232C, интерфейс локальной сети (Ethernet), субмодули ввода-вывода, интерфейс системной шины VME, объединенные внутренней шиной. Для согласования электрических параметров (напряжения, ток) и других факторов (сечение жил кабеля, схемы подключения) управляющих сигналов объекта к процессорному модулю могут быть подключены блоки полевых интерфейсов, что исключает шкафы промклеммников и согласующих реле.
Основными недостатками этого устройства являются неустойчивость к одиночным ошибкам при приеме-передаче по параллельной шине, централизованная обработка входных и выходных данных, снижение производительности при увеличении числа каналов.
Наиболее близким к заявляемому решению является многопроцессорный контроллер для управления сложным технологическим объектом [Патент РФ 2263952, G06F 15/16, 2003], содержащий процессорные модули, состоящие из соединенных внутренней шиной процессора, снабженного интерфейсом последовательной связи и интерфейсом локальной сети, и объединенные дублированной детерминированной локальной сетью нижнего уровня в кластеры посредством первой и второй последовательных системных шин, блока памяти, блока логического управления, субмодулей ввода-вывода, интерфейса измерения и управления объектом, причем каждый процессорный модуль имеет возможность сопряжения с локальной сетью верхнего уровня через интерфейс локальной сети и дополнительно содержит блок формирования географического адреса, связанный с блоком логического управления, первый и второй интерфейсы последовательной системной шины, соединенные соответственно с первой и второй последовательными системными шинами и внутренней шиной.
Это устройство позволяет повысить устойчивость к любому единичному отказу с возможностью дублирования целевых функций и элементов с любой степенью резервирования, с возможностью любой проектной компоновки функций ввода-вывода, с возможностью "горячей" замены отказавших элементов.
Однако это устройство не позволяет изменить набор функций, гибко перестраивать и наращивать количество контролируемых и управляющих параметров, что ограничивает его использование для управления таким сложным процессом, как движение на железной дороге.
Техническим результатом заявленного изобретения является повышение надежности и безопасности функционирования комплекса управления движением на железной дороге путем уменьшения времени обработки информации, повышения степени помехоустойчивости.
Технический результат достигается тем, что управляющий вычислительный комплекс маневровой автоматической локомотивной сигнализации (УВК) содержит установленные в едином каркасе мультипроцессорную компьютерную систему с терминалом в составе монитора и клавиатуры, сетевые коммутаторы, модемный пул со встроенными модемами и источниками питания, разветвители питания, терминальные платы, приемники средств спутниковой навигации и устройство сравнений станционное, при этом мультипроцессорная компьютерная система включает контроллеры центрального процессора с платой тыльного ввода/вывода, контроллер базы данных с платой тыльного ввода/вывода, источники питания, блоки мультипортовые с платами тыльного ввода/вывода, шлюз межсистемный с платой тыльного ввода/вывода, контроллер средств спутниковой навигации с платой тыльного ввода/вывода.
Заявленное устройство отличается комплектацией мультипроцессорной компьютерной системы.
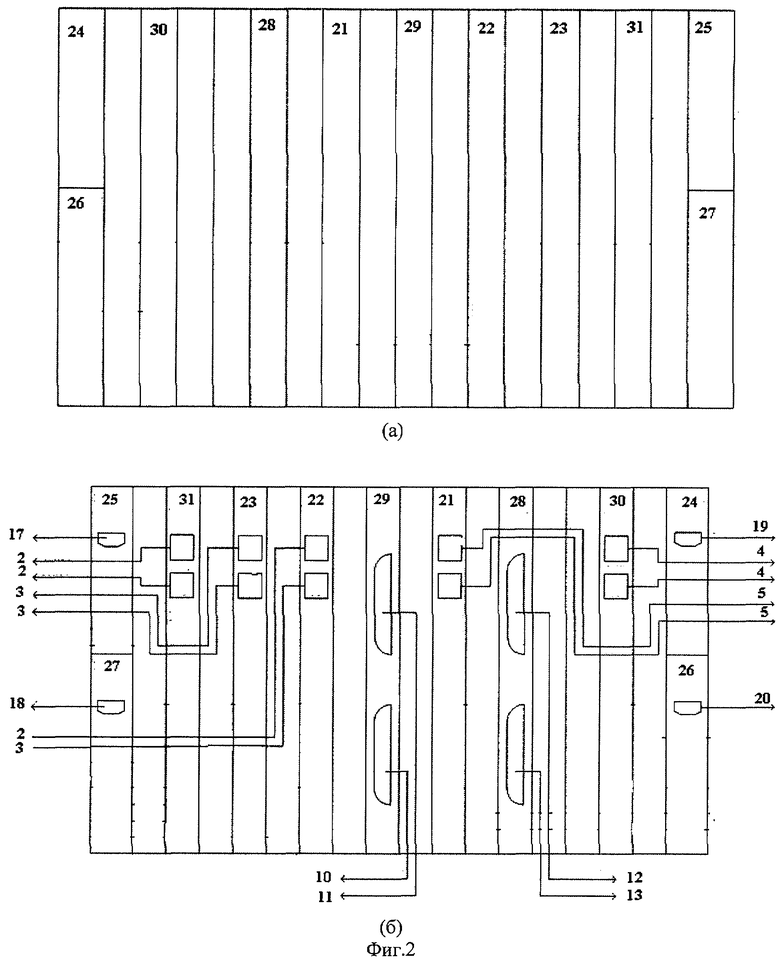
Устройство поясняется чертежами, где на фиг.1 показана схема расположения УВК в корпусе (а) - вид спереди, (б) - вид сзади, на фиг.2 - схема МПКС, (а) - вид спереди, (б) - вид мультипроцессорной компьютерной системы сзади, на фиг.3 - структурная схема работы УВК МАЛС.
УВК содержит следующие элементы (фиг.1):
- мультипроцессорная компьютерная система с терминалом в составе монитора и клавиатуры (1);
- сетевые коммутаторы (2, 3, 4, 5);
- модемный пул со встроенными модемами и источниками питания (6, 7);
- приемники средств спутниковой навигации (8, 9);
- терминальные платы (10, 11, 12, 13);
- устройство сравнений станционное (14);
- блоки питания коммутаторов основной (15) и резервный (16);
- разветвители питания (17, 18, 19, 20);
- блоки вентиляторов (21, 22, 23).
В свою очередь мультипроцессорная компьютерная система состоит из следующей аппаратуры (фиг.2а и 2б):
- контроллеры центрального процессора с платой тыльного ввода/вывода (21, 22);
- контроллер базы данных с платой тыльного ввода/вывода (23);
- источники питания (24, 25, 26, 27);
- блоки мультипортовые (28, 29) с платами тыльного ввода/вывода;
- шлюз межсистемный с платой тыльного ввода/вывода (30);
- контроллер средств спутниковой навигации с платой тыльного ввода/вывода (31).
Все части, входящие в состав мультипроцессорной компьютерной системы (1), представляют собой микропроцессорные платы.
Полный состав изделия определяется проектом на объект его внедрения в соответствии с конфигурацией и особенностями этого объекта. Состав входящей в мультипроцессорную компьютерную систему (1) также определяется указанным проектом.
В целях обеспечения безопасности функционирования системы МАЛС аппаратура шкафа управляющего вычислительного комплекса резервируется. Питание каждого комплекта мультипроцессорной компьютерной системы (1) осуществляется от своего источника питания напряжением 220 В и частотой 50 Гц.
Модемы в модемных пулах (6, 7) питаются напряжением 9 В от собственных источников питания.
Напряжение 220 В частотой 50 Гц подается от устройства бесперебойного питания (БЭП), поставляемого отдельно. На составные части управляющего вычислительного комплекса питание подается через разветвители питания 17, 18, 19, 20.
Мультипроцессорная компьютерная система (1) представляет собой микропроцессорное устройство, реализация функций которого осуществляется при инсталляции дистрибутивного программного обеспечения. Мультипроцессорная компьютерная система (1) осуществляет формирование информации о технологических операциях и поездной ситуации на станции путем циклического опроса приборов электронного центра станции (ЭЦ) и схемы увязки с горкой при помощи распределенной матрицы опроса контактов реле. Запуск программного обеспечения происходит автоматически после подачи питания на МПКС.
Сетевые коммутаторы (2, 3, 4, 5) предназначены для организации внутренней локальной сети системы.
Модемные пулы (6, 7) организуют связь УВК с подсистемами МАЛС и абонентами УВК, находящимися вне здания, в котором расположен УВК, используя существующие телефонные линии.
Терминальные платы 10, 11, 12, 13 предназначены для организации связи между радиосредствами системы, антеннами средств спутниковой навигации и мультипроцессорной компьютерной системой (1).
Устройство сравнения станционное (14) сравнивает информацию, поступившую от двух не зависимых друг от друга контроллеров 21 и 22 и при совпадении этой информации команда управления по радиоканалу передается на маневровый локомотив.
Связь радиостанции с управляющим вычислительным комплексом осуществляется с помощью устройства сравнения станционного (14).
Контроллер базы данных (23) содержит необходимые базы данных для функционирования системы, а также обеспечивает хранение протоколов работы системы.
Шлюз межсетевой (30) обеспечивает увязку с системами информационно-планирующего уровня станции и служит для обеспечения безопасного доступа к компонентам системы с внешних систем.
Контроллер средств спутниковой навигации получает (31) информацию от приемников спутниковой навигации (8, 9) и передает ее в контроллер центрального процессора (21 и 22) для дальнейшей обработки.
Блоки мультипортовые (28, 29) обеспечивают увязку мультпроцессорной компьютерной системы с внешними абонентами, в том числе с микропроцессорными системами централизации без использования шлюза межсистемного (30) и локальной вычислительной сети, организованной посредством применения сетевых коммутаторов (2, 3, 4, 5).
Блоки вентиляторов (21, 22, 23) предназначены для охлаждения аппаратуры, находящейся в шкафу.
Управляющий вычислительный комплекс работает следующим образом.
Включение питания осуществляют в строго определенной последовательности следующим образом:
1. На всех разветвителях питания (17…20) тумблеры питания переводятся в положения «ВКЛ». Тумблеры расположены на задних стенках устройств.
2. При подаче питания устройство сравнения станционное (14) включается в ждущий режим. При нажатии кнопка «ПУСК», расположенная на передней панели устройства 14, включается в рабочий режим.
3. Два тумблера питания мультипроцессорной компьютерной системы (1) переводятся в положения «ВКЛ». Тумблеры расположены на задней стенке системы 1.
4. Тумблера питания рабочих мест (АРМ) переводится в положения «ВКЛ». Тумблеры расположены на задней стенке системных блоков АРМов.
Модемные пулы 6 и 7 включаются автоматически при подаче питания.
Также должны быть обязательно включены все подсистемы станционных устройств МАЛС: КСБ и АРМы. В противном случае УВК не получит полный объем необходимой информации о работе станции и сделает невозможным функционирование всей системы МАЛС.
После включения шкафа управляющего вычислительного комплекса осуществляется самотестирование системы в целом. Определяется наличие связи с абонентами и маневровыми локомотивами, оборудованными БА. На экране терминала мультипроцессорной компьютерной системы отображаются абоненты управляющего вычислительного комплекса, с которыми установлена связь, маневровые локомотивы и поездная ситуация на станции в реальном масштабе времени.
Информация от контроллера сбора данных поступает на мультипроцессорную компьютерную систему (1). По результатам поступившей информации организуются команды и маршруты для маневровых локомотивов, оборудованных бортовой аппаратурой. Информационный обмен с маневровыми локомотивами осуществляется через устройства радиоканала передачи данных.
Управляющий вычислительный комплекс является основной составляющей, которая координирует работу всей системы МАЛС на станции.
Использование современной элементной базы и программного обеспечения позволяет уменьшить время обработки информации, повысить степень помехоустойчивости, а следовательно, надежность и безопасность функционирования УВК в составе системы МАЛС.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ СОРТИРОВОЧНЫХ СТАНЦИЙ | 2009 |
|
RU2401217C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
| СИСТЕМА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ (МАЛС) | 2008 |
|
RU2369509C1 |
| СТАНЦИОННОЕ УСТРОЙСТВО МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2011 |
|
RU2478508C1 |
| УПРАВЛЯЮЩИЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС СО ВСТРОЕННЫМ МУЛЬТИПАРАМЕТРИЧЕСКИМ АНАЛИЗАТОРОМ ВОДЫ ДЛЯ СИСТЕМ ЖИЗНЕОБЕСПЕЧЕНИЯ МОРСКИХ И ПРЕСНОВОДНЫХ ГИДРОБИОНТОВ | 2011 |
|
RU2561190C2 |
| Станционное устройство системы маневровой автоматической локомотивной сигнализации, интегрированной с микропроцессорной централизацией железнодорожной станции | 2022 |
|
RU2780257C1 |
| СИСТЕМА ГОРОЧНОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ РАДИОКАНАЛА (ГАЛС Р) | 2005 |
|
RU2303542C1 |
| БОРТОВАЯ АППАРАТУРА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2009 |
|
RU2411152C1 |
| Система управления маневровыми локомотивами | 2016 |
|
RU2622524C1 |
| СИСТЕМА ПЕРЕДАЧИ ДАННЫХ МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2011 |
|
RU2478509C1 |

Изобретение относится к вычислительной технике, в частности к системам автоматизации управления технологическими процессами крупных промышленных объектов. Технический результат заключается в повышении надежности и безопасности функционирования комплекса управления движением на железной дороге путем уменьшения времени обработки информации, повышения степени помехоустойчивости. Управляющий вычислительный комплекс маневровой автоматической локомотивной сигнализации содержит установленные в едином каркасе, мультипроцессорную компьютерную систему с терминалом в составе монитора и клавиатуры, сетевые коммутаторы, модемный пул со встроенными модемами и источниками питания, разветвители питания, приемники средств спутниковой навигации, терминальные платы и устройство сравнений станционное, при этом мультипроцессорная компьютерная система включает контроллеры центрального процессора с платой тыльного ввода/вывода, контроллер базы данных с платой тыльного ввода/вывода, источники питания, блоки мультипортовые с платами тыльного ввода/вывода, шлюз межсистемный с платой тыльного ввода/вывода, контроллер средств спутниковой навигации с платой тыльного ввода/вывода. 3 ил.
Управляющий вычислительный комплекс маневровой автоматической локомотивной сигнализации, содержащий установленные в едином каркасе мультипроцессорную компьютерную систему с терминалом в составе монитора и клавиатуры, сетевые коммутаторы, реализующие внутреннюю локальную сеть системы, модемный пул со встроенными модемами и источниками питания, реализующий связь управляющего вычислительного комплекса с подсистемами маневровой автоматической локомотивной сигнализации и абонентами, разветвители питания, приемники средств спутниковой навигации, терминальные платы, предназначенные для обеспечения связи с приемниками средств спутниковой навигации и мультипроцессорной компьютерной системой, и устройство сравнений станционное, при этом мультипроцессорная компьютерная система включает контроллеры центрального процессора с платой тыльного ввода/вывода, контроллер базы данных с платой тыльного ввода/вывода, источники питания, блоки мультипортовые с платами тыльного ввода/вывода, шлюз межсистемный с платой тыльного ввода/вывода, контроллер средств спутниковой навигации с платой тыльного ввода/вывода, предназначенный для получения информации от приемников средств спутниковой навигации и передачи их в контроллеры центрального процессора, а устройство сравнения станционное предназначено для сравнения информации, поступающей от контроллеров центрального процессора, и формирования команды управления для передачи по радиоканалу на маневровый локомотив.
| МНОГОПРОЦЕССОРНЫЙ КОНТРОЛЛЕР ДЛЯ УПРАВЛЕНИЯ СЛОЖНЫМ ТЕХНОЛОГИЧЕСКИМ ОБЪЕКТОМ | 2003 |
|
RU2263952C2 |
| СИСТЕМА ГОРОЧНОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ РАДИОКАНАЛА (ГАЛС Р) | 2005 |
|
RU2303542C1 |
| КОМПЛЕКТ АППАРАТУРЫ АТС СИСТЕМЫ ОХРАННО-ПОЖАРНОЙ СИГНАЛИЗАЦИИ | 2001 |
|
RU2207631C2 |
| CN 1987705 A, 27.06.2007 | |||
| US 5437422 A, 01.08.1995 | |||
| СИСТЕМА ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 1994 |
|
RU2103744C1 |

